
Abstract
Strong orthogonal arrays were recently introduced as a new class of space-filling designs for computer experiments due to their better stratifications than orthogonal arrays. To further improve the space-filling properties in low dimensions while possessing the column orthogonality, we propose column-orthogonal strong orthogonal arrays of strength two star and three. Construction methods and characterizations of such designs are provided. The resulting strong orthogonal arrays, with the numbers of levels being increased, have their space-filling properties in one and two dimensions being strengthened. They can accommodate comparable or even larger numbers of factors than those in the existing literature, enjoy flexible run sizes, and possess the column orthogonality. The construction methods are convenient and flexible, and the resulting designs are good choices for computer experiments.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Computer experiments are becoming increasingly popular and powerful to investigate complex phenomena and systems in engineering and sciences (Fang et al. 2006; Santner et al. 2013). The most popular statistical approach to computer experiments is to fit a kriging model to data generated by a computer simulation. Space-filling designs (that spread points uniformly over the design space) have been shown to be good choices for fitting such models. In some settings, space-filling designs that retain space-filling properties when projected onto subspaces are attractive. To be specific, consider a computer experiment with output y that is a function of m inputs \(x_1, x_2,\dots , x_m\) from the design space. When m is large, fitting kriging models to data can become computationally challenging. In some cases, the first step in the analysis is to perform a sensitivity analysis. If the output is found to be insensitive to certain inputs over the design space, those inputs are ignored and a kriging model is fit to the remaining inputs. Space-filling designs that are also space-filling when projected onto the subspace of these remaining inputs are thus attractive.
Space-filling designs are appropriate as one-stage designs for fitting a kriging model to data from a computer experiment. For space-filling designs to be appropriate, we assume no prior knowledge about the correlation structure of the kriging model and that the goal is good overall fit of the kriging model, where space-filling designs that spread points uniformly over the design space implicitly assume the correlation structure for the kriging model is isotropic. Vazquez and Bect (2011) provided some theoretical justification for space-filling designs. By analyzing the limiting properties of the prediction variance, they show that no design will outperform (in terms of the rate at which the maximum of the mean square prediction error decreases) designs that become dense in the design space as the number of runs tends to infinity. This also helps clarify the notion of space-filling in that it suggests that a method for generating designs is space-filling if as the sample size tends to infinity, the points in the design become dense in the design space.
Three types of commonly used space-filling designs are Latin hypercube designs (McKay et al. 1979), uniform designs (Fang et al. 2018) and maximin/minimax distance designs (Johnson et al. 1990). A Latin hypercube design is a design with the run size being equal to the number of levels for each factor and the levels being set to be equally spaced. Latin hypercube designs only achieve the one-dimensional space-filling property. Furthermore, randomized orthogonal arrays (OAs) (Owen 1992) and orthogonal array-based Latin hypercube designs (Tang 1993) employ OAs of strength t to realize the t-dimensional space-filling property. The main idea of uniform designs is to scatter the design points uniformly over the experimental domain. Many criteria have been proposed to measure the uniformity, where the centered \(L_2\)-discrepancy (Hickernell 1998) is the most popular one. However, space-filling designs based on some discrepancy or distance criterion usually need algorithmic searches. Such designs with large run sizes are often prohibitive to obtain due to their computational complexity. To construct space-filling designs, some systematic construction methods are desirable.
Recently, He and Tang (2013) introduced the concept of strong orthogonal arrays (SOAs). These arrays of strength t have better space-filling properties than ordinary OAs in less than t dimensions and they perform the same in t dimensions. However, SOAs, to enjoy more attractive space-filling properties than OAs, must have strength 3 or higher. He and Tang (2014) examined the characterization of SOAs of strength 3. Given the number of runs, the number of factors for an SOA of strength 3 is very small. Hence, He et al. (2018) proposed a new class of arrays, called SOAs of strength 2+, which have more factors with the same two-dimensional space-filling property retained.
However, the SOAs of strength 3 (He and Tang 2014; Shi and Tang 2020) and SOAs of strength 2+ (He et al. 2018) have no column orthogonality. Column orthogonality plays a vital role in computer experiments. The advantage of this property in computer experiments is that column-orthogonal designs are often space-filling. More specifically, column orthogonality, viewed as a stepping stone, helps finding space-filling designs when Gaussian process models are considered (Bingham et al. 2009). Besides, column orthogonality makes the estimates of the main effects uncorrelated when linear models are considered. Many researchers have discussed column orthogonality of Latin hypercube designs including Ye (1998), Steinberg and Lin (2006), Sun et al. (2009), Lin et al. (2009), and so on. Liu and Liu (2015) constructed column-orthogonal strong orthogonal arrays (OSOAs) of strength t based on OAs of strength t while their column sizes are very small. Zhou and Tang (2019) further constructed OSOAs of strength 2+. We note that the number of levels for an SOA of strength 2+ is only \(s^2\) with the stratifications on \(s^2 \times s\) and \(s\times s^2\) grids in any two dimensions.
In this paper, we propose OSOAs of strengths \(2*\) and 3, and provide some convenient and flexible construction methods. The resulting OSOAs not only possess the column orthogonality and two-dimensional stratifications as those in Zhou and Tang (2019), but also, with the numbers of levels being increased from \(s^2\) to \(s^3\), enjoy better one-dimensional stratification and two-dimensional uniformity than the latter. The numbers of factors for the OSOAs of strengths \(2*\) and 3 are almost the same as those of the OSOAs of strengths 2+ and \(3-\) in Zhou and Tang (2019), respectively, and larger than those of the OSOAs of strength 3 in Liu and Liu (2015). In addition, since the proposed construction methods are based on OAs (regular or nonregular), the resulting OSOAs have flexible run sizes. Furthermore, eight-level OSOAs of strength 3 share the same stratifications as that of the SOAs of strength 3 in He and Tang (2014). Bingham et al. (2009) discussed the rationale and usefulness for constructing column-orthogonal designs that are not Latin hypercube designs but still have many levels. The proposed OSOAs with many levels relax the restriction that the number of runs equals the number of levels for each factor and then enjoy good stratifications.
The remainder of this paper is organized as follows. Section 2 introduces some preliminaries and defines the SOA of strength \(2*\). Section 3 is devoted to the construction methods for eight-level OSOAs of strength 3 and OSOAs of strength \(2*\). Section 4 provides some comparisons between the constructed OSOAs and other types of SOAs. Section 5 contains some concluding remarks. All the proofs are deferred to the Appendix.
2 Definitions and preliminaries
An \(n\times m\) matrix with entries from \(\{0, 1, \dots , s_{j}-1\}\) in the jth column is called an OA of n runs, m factors and strength t if, in any \(n \times t \) subarray, all possible level-combinations occur equally often. We denote such an array by OA\((n,m, s_1 \times \cdots \times s_m, t)\). The array is symmetric if \(s_1 = \dots = s_m = s\), denoted by OA(n, m, s, t), and asymmetric otherwise. For an OA(n, m, s, t), we have \(n=\lambda s^t\) for some integer \(\lambda \), which is called the index of the OA. An \(n \times m\) matrix with entries from \(\{0, 1, \dots , s^t -1\}\) is called an SOA of n runs, m factors, \(s^t\) levels and strength t if any g-column subarray with \(1 \le g \le t\) can be collapsed into an OA\((n, g, s^{u_1} \times \dots \times s^{u_g}, g\)) for any positive integers \(u_1, \dots , u_g\) with \(u_1 + \dots + u_g = t\), where collapsing \(s^t\) levels into \(s^{u_j}\) levels is according to \(\lfloor x/s^{t-u_j} \rfloor \) for \(x = 0,1,\dots , s^t -1\), and \(\lfloor x \rfloor \) is the largest integer not exceeding x. Denote this array by SOA\((n, m, s^t, t)\). Any SOA\((n, m, s^t, t)\) can be collapsed into an OA(n, m, s, t) so \(n= \lambda s^t\), where \(\lambda \) is also called the index of the SOA. Consequently, any SOA\((n, m, s^3, 3)\) can achieve stratifications on \(s^2 \times s\) and \(s \times s^2\) grids in two dimensions and \(s \times s \times s\) grids in three dimensions. See He and Tang (2013, 2014) for more details of SOAs.
An \(n \times m\) matrix with entries from \(\{0, 1,\dots , s^2 - 1\}\) is called an SOA of strength \(2+\) with n runs, m factors and \(s^2\) levels, denoted by SOA\((n, m, s^2, 2+)\), if any two-column subarray can be collapsed into an OA\((n, 2, s^2 \times s, 2)\) and an OA\((n, 2, s \times s^2, 2)\). An SOA\((n, m, s^2, 2+)\) enjoys the same two-dimensional stratifications as those of an SOA\((n,m^*, s^3, 3)\), while the former can accommodate more factors. An \(n \times m\) matrix with entries from \(\{0, 1,\dots , s^2 - 1\}\) is called an SOA of strength \(3-\), denoted by SOA\((n, m, s^2, 3-)\), if any two-column subarray can be collapsed into an OA\((n, 2, s^2 \times s, 2)\) and an OA\((n, 2, s \times s^2, 2)\), and any three-column subarray can be collapsed into an OA(n, 3, s, 3). We refer readers to Zhou and Tang (2019) for more details about the SOAs of strength \(3-\).
For an \(n\times m\) design \(D=(x_{ik})\) with s levels \(\{0, 1, \dots , s-1\}\), its (squared) centered \(L_2\)-discrepancy is defined as
where \(z_{ik}=(2x_{ik}-s+1)/(2s)\). Since in practice two-factor interactions are usually more important than three-factor or higher-order interactions, Sun et al. (2019) proposed the uniform projection criterion focusing on all two-dimensional projections for design D as follows:
where u is a subset of \(\{1,2,\dots , m\}\), |u| denotes the cardinality of u and \(D_u\) is the projection of D onto dimensions indexed by the elements of u. The \(\phi (D)\) in (1) is the average CD values of all two-dimensional projections of D. A design with a low \(\phi (D)\) is preferred. Moreover, if D is an \(n \times m\) design with entries from \(\{0, 1, \dots , s-1\}\) where the s levels appear equally often for each factor, then Sun et al. (2019) showed that for any \(2 \le k \le m\),
This shows that for any \(2 \le k \le m\), the average \(\phi \) value of all k-factor projections is equal to \(\phi (D)\). A design achieving the minimum \(\phi (D)\) value is a uniform projection design. Such a design tends to have small \(\phi (D_u)\)’s for all projections (Sun et al. 2019). In fact, Eq. (2) helps clarify the usefulness of uniformity measure \(\phi (D)\) for two dimensions. We will use \(\phi (D)\) in (1) to measure the two-dimensional uniformity of a design D.
A design D is called column-orthogonal if the inner product of any two columns of the centered design is zero. For ease of presentation, the centering of a design means that the s levels are equally spaced, centered, and labeled as in the set \(\Omega (s) =\{-(s-1)/2, -(s-3)/2, \dots , (s-3)/2, (s-1)/2\}\). For example, the levels are \(-1/2, 1/2\) if \(s=2\) and \(-1, 0, 1\) if \(s=3\). We denote a column-orthogonal SOA\((n, m, s^t, r)\) by an OSOA\((n, m, s^t, r)\) with \((t,r)=(3,3), ~ (2,2+)\) and \((2,3-)\) here. The OSOA\((n, m, s^2, 3-)\) can be constructed only for \(s=2\) in Zhou and Tang (2019).
The definition of the SOA of strength \(2*\) is as follows.
Definition 1
An \(n \times m\) matrix with entries from \(\{0, 1,\dots , s^3 - 1\}\) is called an SOA of strength \(2*\) if any two-column subarray can be collapsed into an OA\((n, 2, s^2 \times s, 2)\) and an OA\((n, 2, s \times s^2, 2)\). Denote this array by SOA\((n, m, s^3, 2*)\). If such an array is column-orthogonal, denote it by OSOA\((n, m, s^3, 2*)\).
Compared with the OSOA\((n,m, s^2, 2+)\) defined in Zhou and Tang (2019), OSOA(n, \(m, s^3, 2*)\) achieves the same stratifications on \(s^2 \times s\) and \(s \times s^2\) grids in two dimensions, in addition to the column orthogonality. The main difference lies in the number of levels, i.e., the former has \(s^2\) levels, while the latter has \(s^3\) levels, implying that the latter achieves a finer stratification in any one dimension and has less repeated runs in any two dimensions. The latter also shares better two-dimensional uniformity than the former.
An illustrative example is given below.
Example 1
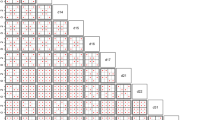
Consider the two designs with 16 runs shown in Table 1. The first one is an OSOA(16, 6, 8, \(2*)\) as defined above and the second one is an OSOA\((16,7, 4, 2+)\) from Zhou and Tang (2019). Their stratification properties can be seen intuitively from Figure 1, where \(d_j\) stands for the jth column of each design. Both designs have (i) column orthogonality and (ii) the stratifications on \(4 \times 2\) and \(2 \times 4\) grids for any two columns. The difference is that the first design has 4 more levels than the second one. This directly improves the stratification in any one dimension. For the uniformity of the projections onto any two dimensions, we consider the uniform projection criterion defined in (1). The \(\phi \) values for the two designs are 0.063 and 0.111, respectively. This indicates a better uniformity for the OSOA\((16,6,8,2*)\).

Bivariate projections of OSOAs with \(s=2\) in Example 1
3 Construction of OSOAs
This section studies the construction methods for OSOAs using OAs including regular and nonregular designs. Section 3.1 provides a general framework for the construction of OSOAs, where the careful choices of OAs play an important role in the construction. In Sect. 3.2, eight-level OSOAs of strength 3 are constructed by choosing suitable two-level OAs. In Sect. 3.3, \(s^3\)-level OSOAs of strength \(2*\) are constructed by selecting general s-level OAs.
3.1 General construction method
We now present the general framework for the construction of OSOAs.
Construction 1
-
Step 1.
Let \(A=(a_1, \dots , a_m)\) and \(B=(b_1, \dots , b_m)\) be two \(n\times m\) OAs with entries from \(\{0, 1, \dots , s-1\}\).
-
Step 2.
Let \(p= \lfloor m/2 \rfloor \) and \(C=(C_1, \dots , C_p)\), where \(C_j=(a_{2j-1}, b_{2j-1}, a_{2j}, b_{2j})\) for \(j=1, \dots , p\).
-
Step 3.
For \(j=1,\dots ,p\), let \(C_j^*=C_j - (s-1)/2\) such that the s levels \(\{0, 1, \dots , s-1\}\) are transformed into \( \Omega (s)\). Define
$$\begin{aligned} D^*= (D_1^*, \dots , D_p^*), \end{aligned}$$(3)where \(D_j^*=C_j^*V\) for \(j=1, \dots , p\), and
$$\begin{aligned} V= \left( \begin{array}{rrrr} s^2 &{} s &{} 1 &{} 0 \\ -1 &{} 0 &{} s^2 &{} s \\ \end{array} \right) ^T, \end{aligned}$$(4)where \(^T\) denotes the transpose of a matrix.
-
Step 4.
Let
$$\begin{aligned} D=D^* + (s^3-1)/2, \end{aligned}$$(5)which transforms the levels of \(D^*\) from \(\Omega (s^3)\) into \(\{0, 1, \dots , s^3-1\}\).
Throughout this paper, let \(m'=2\lfloor m/2 \rfloor \), which equals m for an even m and \(m - 1\) for an odd m. From Construction 1, a theoretical property of the proposed design D in (5) can be stated as follows.
Theorem 2
If both \(A=(a_1, \dots , a_m)\) and \(B=(b_1, \dots , b_m)\) are OA(n, m, s, 2)’s such that \((a_i, a_j, b_j)\) is an OA of strength 3 for any \(i \ne j\), then the design D in (5) is an OSOA\((n, m', s^3\), \(2*)\).
In Construction 1, design C is not required to have strength 3, but if it is, an OSOA of strength 3 can be constructed. Dropping this requirement of strength 3 for design C is regarded as a stepping stone to the construction of the proposed OSOAs. Thus the constructed designs can accommodate more columns than OSOAs of strength 3 from Liu and Liu (2015) because they are based on OAs of strengths 2 and 3, respectively.
Moreover, we can allow the design D in Theorem 2 to achieve stratifications on \(s\times s \times s\) grids in three dimensions provided that A has strength 3. This is based on the fact that, from the proof of Theorem 2, \(\lfloor D/s^2 \rfloor \) becomes the first \(m'\) columns of A. Then we have the following result.
Theorem 3
If A is an OA(n, m, s, 3) and B is an OA(n, m, s, 2) such that \((a_i, a_j, b_j)\) is an OA of strength 3 for any \(i \ne j\), then the design D in (5) is an OSOA\((n, m', s^3, 3)\).
Theorem 3 presents a convenient and useful way to construct OSOA\((n, m', s^3, 3)\)’s.
In the next two subsections, we investigate how to construct OSOA\((n, m', s^3, 3)\)’s with \(s=2\) and OSOA\((n, m', s^3, 2*)\)’s with \(s \ge 3\) by choosing suitable A and B in Theorems 2 and 3. These choices of A and B are based on OAs including regular and nonregular designs.
3.2 Eight-level OSOAs of strength 3
This subsection examines the construction of eight-level OSOAs of strength 3 with flexible runs based on two-level OAs.
Let X be a two-level saturated OA\((m, m-1, 2, 2)\), and further let
where \(1 + X\) is the matrix obtained by adding 1 (mod 2) to all the entries of X. Clearly, both A and B are OA\((2m, m-1, 2, 2)\)’s. By applying the A and B in (6) to Construction 1, we have the following result.
Theorem 4
Let X be an OA\((m, m-1, 2, 2)\). Then an OSOA\((2m, m-2, 8, 3)\) can be constructed from the A and B in (6) via Construction 1.
Theorem 4 shows that from any saturated design X, we can obtain an eight-level OSOA of strength 3. Since a two-level saturated OA (regular or nonregular) can be obtained by omitting the first column of a normalized Hadamard matrix (Hedayat et al. 1999, Chap. 7), Theorem 4 can yield a series of eight-level OSOAs of strength 3 with flexible run sizes. The following is an illustrative example.
Example 2
A Hadamard matrix of order 8 produces an OA(8, 7, 2, 2), then an OSOA(16, 6, 8, 3) can be constructed, which is shown as the OSOA\((16, 6, 8, 2*)\) in Table 1. Similarly, we can derive an OSOA(24, 10, 8, 3) from a Hadamard matrix of order 12, an OSOA(32, 14, 8, 3) from a Hadamard matrix of order 16, and so on.
3.3 OSOAs of strength \(2*\)
This subsection concentrates on the construction of OSOA\((n, m, s^3, 2*)\)’s with \(s\ge 3\) via regular or nonregular designs. We first consider the construction using s-level regular designs with \(n=s^k\) runs for \(k \ge 3\), where s is a prime power. Let GF\((s)=\{\alpha _0=0, \alpha _1 =1, \dots , \alpha _{s-1}\}\) be a Galois field of order s, which is simplified as \(\{0,1, \dots , s-1\}\) if s is a prime. Let \(e_1, \dots , e_k\) be the k independent columns, and all their possible interaction columns \({u_1} e_1 + \cdots + {u_k}e_k\) can be denoted by \(e_1 ^{u_1} \cdots e_k ^{u_k}\), where \(u_j \in \{0, 1, \dots , s-1\}\) are not all zeros. Then a saturated regular design OA\((s^k, (s^k-1)/(s-1),s,2)\) can be formed by combining all the columns \(e_1 ^{u_1} \cdots e_k ^{u_k}\) with the first nonzero entry \(u_j\) in the vector \((u_1,\dots , u_k)\) being equal to one. The construction for OSOAs of strength \(2*\) can be carried out as follows.
For the k independent columns \(e_1, \dots , e_{k-1}, e_k\), let \(B=(b_1, \dots , b_m)\) be an \(n \times m\) s-level regular design with \(n=s^k\) and \(m=(s^{k-1}-1)/(s-1)\), whose columns consist of \(e_1, \dots , e_{k-1}\) and all their possible interaction columns. Define \(A=(a_1, \dots , a_m)\) such that \(a_j=b_je_k\) for \(j=1,\dots , m\). Replace the s levels \(\{\alpha _0, \alpha _1, \dots , \alpha _{s-1}\}\) of A and B by \(\{0,1, \dots , s-1\}\) if s is a prime power. Then, based on Construction 1, we have the following result.
Theorem 5
For any prime power \(s\ge 3\) and \(k\ge 3\), an OSOA\((s^k, m', s^3, 2*)\) can be constructed from the above A and B via Construction 1 where \(m=(s^{k-1}-1)/(s-1)\).
The resulting design D in Construction 1 is also an OSOA\((s^k, m', s^3, 2*)\) if each term \(e_k\) for array A is replaced by \(e_k^l\), for any \(l=2, \dots , s-1\), in the above construction. For \(k=3\), an OSOA\((s^3, 2\lfloor (s+1)/2 \rfloor , s^3, 2*)\) can be constructed. This means that we can derive an OSOA\((s^3, s+1, s^3, 2*)\) at almost no cost. This array shares the same two-dimensional stratifications as an SOA\((s^3, s+1, s^3, 3)\) in He and Tang (2014), while the latter has no column orthogonality.
Example 3
For \(s=5\) and \(k=3\), let \(B=(e_1, e_2, e_1 e_2, e_1 e_2^2, e_1 e_2^3, e_1 e_2^4)\) and \(A=(e_1e_3, e_2e_3, e_1 e_2e_3,\) \(e_1 e_2^2e_3, e_1 e_2^3e_3, e_1 e_2^4e_3)\). Then Theorem 5 can produce an OSOA(125, \(6, 125, 2*)\). This design achieves stratifications on \(25\times 5\) and \(5\times 25\) grids in two dimensions and the maximum stratification in any one dimension. This means that the OSOA\((125, 6, 125, 2*)\) is an orthogonal Latin hypercube design with a good two-dimensional space-filling property.
Theorem 5 gives a construction of OSOAs via s-level regular designs. Next, we can construct OSOAs via general s-level (regular or nonregular) OAs. Let \(C_0\) be an OA(n, m, s, 2). Define two \(sn \times m\) matrices
Clearly, both A and B are OA(sm, m, s, 2)’s. Write \(A=(a_1, \dots , a_m)\) and \(B=(b_1, \dots , b_m)\). From the structures of A and B, we can see that the array \((a_i, a_j, b_j)\) is an OA of strength 3 for any \(i \ne j\). According to Construction 1 and Theorem 2, OSOAs of strength \(2*\) can then be obtained.
Theorem 6
Let \(C_0\) be an OA(n, m, s, 2). Then an OSOA\((sn, m', s^3,\) \(2*)\) can be constructed from the A and B in (7) via Construction 1.
Theorem 6 provides a straightforward and powerful method to construct OSOAs of strength \(2*\) according to flexible choices of OAs. Unlike the methods in He and Tang (2013, 2014), the newly proposed method requires no use of generalized orthogonal arrays and semi-embeddable orthogonal arrays of strength 3. In addition, for any s, whether it is a prime power or not, an OSOA\( (sn, m', s^3, 2*)\) can be generated by any OA(n, m, s, 2). To illustrate this generality, let us see three applications of the proposed method.
Application 1
An OA\((m,m-1,2,2)\) can be derived by deleting the first column of the normalized Hadamard matrix of order m. Then Theorem 6 can produce an OSOA\((2m, m-2, 8, 2*)\), which is in fact the OSOA\((2m, m-2, 8, 3)\) obtained in Theorem 4. Note that a library of Hadamard matrices can be found from Dr. N. J. A. Sloane’s website, http://neilsloane.com/hadamard/.
Application 2
For a prime power s, the Rao-Hamming construction (Hedayat et al. 1999, Chap. 3.4) gives a saturated OA\((s^{k-1},m,s,2)\) with \(m=(s^{k-1}-1)/(s-1)\). Based on such an OA, Theorem 6 gives an OSOA\((s^k, m', s^3, 2*)\). This gives another approach to constructing the OSOA with the parameters in Theorem 5. For \(s=3\), we can obtain an OSOA\((27, 4, 27, 2*)\), an OSOA\((81, 12, 27, 2*)\), an OSOA\((243, 40, 27, 2*)\), and so on.
Application 3
For an odd prime power s, the Addelman-Kempthorne construction (Hedayat et al. 1999, Chap. 3.3) gives an OA\((2s^{k-1},m,s,2)\) with \(m=2(s^{k-1}-1)/(s-1) -1\). By Theorem 6, one can obtain an OSOA\((2s^k, m', s^3, 2*)\), which cannot be constructed from Theorem 5. For example, taking \(s=k=3\), we can obtain an OSOA\((54, 6, 27, 2*)\) from an OA(18, 7, 3, 2). Similarly, we can obtain an OSOA\((162, 24, 27, 2*)\), an OSOA\((250, 10, 125, 2*)\), and so on.
Remark 1
The above three applications can generate a rich class of OSOAs of strength \(2*\). When the original OA \(C_0\) has index unity, the resulting design D is an orthogonal Latin hypercube design. By Theorem 6, any OSOA\((s^3, m', s^3, 2*)\) is an orthogonal Latin hypercube design for \(s=3,4,5,7,8,9,\dots \). If the index of the \(C_0\) is two or more, the proposed method still can generate a column-orthogonal design with many levels. For example, Theorem 6 can produce an OSOA\((\lambda s^k,m',s^3,2*)\) if an OA\((\lambda s^{k-1},m,s,2)\) exists (see the examples in Application 3). Because of this, the proposed method can generate OSOAs with flexible indices.
4 Comparisons with existing SOAs
This section provides some comparisons between the constructed OSOAs and the existing SOAs in He and Tang (2014), Liu and Liu (2015) and Zhou and Tang (2019). Let us first see their differences through the following example.
Example 4
For \(s=3\) and \(k=3\), Application 2 can generate an OSOA\((27, 4, 27, 2*)\), which is also an orthogonal Latin hypercube design. Based on an OA(27, 4, 3, 3), the OSOA(27, 2, 27, 3) constructed in Liu and Liu (2015) only has two columns. The SOA(27, 4, 27, 3) constructed in He and Tang (2014) and the newly constructed design can accommodate four columns, while the former has no column orthogonality. Table 2 presents the OSOA\((27, 4, 27, 2*)\) constructed in this paper and the OSOA\((27, 4, 9, 2+)\) constructed by Zhou and Tang (2019), and Figure 2 intuitively shows the stratification properties by their bivariate projections, where \(d_1\), \(d_2\), \(d_3\) and \(d_4\) stand for four columns of each design. Both of them achieve stratifications on \(9\times 3\) and \(3 \times 9\) grids in two dimensions, but the OSOA\((27, 4, 27, 2*)\) achieves the maximum one-dimensional stratification that is larger than the OSOA\((27, 4, 9, 2+)\). For the uniform projection criterion defined in (1), the OSOA\((27, 4, 27, 2*)\) has a smaller \(\phi \) value than the OSOA\((27, 4, 9, 2+)\) (0.024 vs 0.049). This implies that the former has a better two-dimensional uniformity.

Bivariate projections of OSOAs with \(s=3\) in Example 4
The proposed methods can produce many eight-level OSOAs of strength 3 and OSOAs of strength \(2*\) based on the above three applications. For the run sizes \(n \le 300\), some of the resulting designs are shown in Table 3 and many others, which can be obtained similarly, are omitted.
Table 3 shows some comparisons among the four kinds of designs, including the SOA(n, m, \(s^3, 3)\) from He and Tang (2014), OSOA\((n, m,s^3,3)\) from Liu and Liu (2015), OSOA\((n, m, s^2,p_1)\) from Zhou and Tang (2019) and OSOA\((n, m,s^3, p_2)\) from the proposed methods. For simplicity, we denote these designs by SOA(3), OSOA(3), OSOA\((s^2,\) \(p_1)\) and OSOA\((s^3, p_2)\), respectively.
We summarize the following observations from Table 3. All the four kinds of SOAs achieve the same stratifications on \(s^2 \times s\) and \(s\times s^2\) grids, and SOA(3), OSOA(3), OSOA\((s^2,3-)\) and OSOA\((s^3,3)\) achieve stratifications on \(s \times s \times s\) grids. Compared with the SOA(3), the newly obtained design OSOA\((s^3, p_2)\) has the additional column orthogonality. Compared with the OSOA(3), if it is available, the OSOA\((s^3, p_2)\) can accommodate much more columns with column orthogonality, in addition to the same two-dimensional stratifications, although the three-dimensional stratifications for the OSOA\((s^3, 2*)\) with \(s\ge 3\) cannot be guaranteed. Compared with the OSOA\((s^2, p_1)\), the new design OSOA\((s^3, p_2)\) achieves a finer stratification in any one dimension. The smaller \(\phi (D)\) values (seen from Table 3) show that, compared with the OSOA\((s^2, p_1)\), the OSOA\((s^3, p_2)\) has a better two-dimensional uniformity. Compared with the SOA(3) and OSOA(3) based on OAs of strength 3, which do not exist for many parameters n and m, the OSOA\((s^2, p_1)\) and OSOA\((s^3, p_2)\) based on OAs of strength 2 gain column orthogonality and/or more columns with the same two-dimensional stratifications. For example, if the run size \(n=243\) is fixed, the SOA(3), OSOA(3), OSOA\((s^2, p_1)\) and OSOA\((s^3, p_2)\) can accommodate 19, 10, 40 and 40 factors, respectively.
At the end of this section, we first consider the comparison of the column sizes between the OSOA\((s^2, p_1)\) and OSOA\((s^3, p_2)\) with the same numbers of run sizes. Table 3 shows that the number of column sizes of the OSOA\((s^3, p_2)\) is the same as or one less than that of the OSOA\((s^2, p_1)\), while the OSOA\((s^3, p_2)\) has better one-dimensional projections. We next consider the comparison of the run sizes and column sizes between the OSOA\((s^2, p_1)\) and OSOA\((s^3, p_2)\) with the same numbers of levels. From an OA(64, 9, 8, 2), the OSOA\((s^2, p_1)\) becomes an OSOA\((512, 9,64,2+)\), while, from an OA(64, 21, 4, 2), the OSOA\((s^3, p_2)\) becomes an OSOA(256, 20, 64, \(2*)\). Both SOAs have the same 64 levels for each factor. Note that the former achieves stratifications on \(64\times 8\) and \(8 \times 64\) grids in two dimensions and the newly constructed design (the latter) achieves stratifications on \(16 \times 4\) and \(4 \times 16\) grids in two dimensions. Although the former enjoys better property of stratifications, the latter can use less runs (512 vs 256) to accommodate much more factors (9 vs 20). This provides us more design choices for practical applications.
5 Concluding remarks
This paper proposes column-orthogonal strong orthogonal arrays (OSOAs) of strengths \(2*\) and 3, and provides some construction methods. The OSOAs of strength \(2*\) enjoy the same two-dimensional space-filling property as the SOAs of strength 3 and the additional column orthogonality. Compared with the OSOAs of strength \(2+\) in Zhou and Tang (2019), the proposed OSOAs of strength \(2*\) achieve finer one-dimensional stratifications and have better two-dimensional uniformities, while they still accommodate comparable numbers of factors. Furthermore, the newly constructed eight-level OSOAs of strength 3 enjoy the same stratifications in three dimensions as the SOAs of strength 3 and four-level OSOAs of strength \(3-\).
The proposed OSOAs of strength \(2*\) are based on orthogonal arrays (regular or nonregular) and hence share flexible run sizes. The corresponding construction methods are convenient and powerful. The resulting designs are particularly useful for computer experiments.
Compared with the OSOAs in Zhou and Tang (2019), the proposed OSOAs in this paper increase the numbers of levels from \(s^2\) to \(s^3\) such that the numbers of levels \(s^3\) with \(s\ge 2\) is moderate, which is beneficial to fit response surfaces that have multiple extrema in the context of computer experiments.
When the number of runs n is equal to the number of levels \(s^3\) \((s \ge 2)\), the proposed OSOA\((n, m, s^3,\) \(p_2)\) becomes a Latin hypercube design. In such a case, no repeated observation occurs when a design is projected onto lower dimensions. When \(n=\lambda s^3\) \((s \ge 2)\) with \(\lambda \ge 2\), one solution is to perform level expansions on the proposed OSOA\((n, m, s^3, p_2)\) such that the resulting design becomes a Latin hypercube design by, for each column, replacing the \(\lambda \) entries for level j by any permutation of \(\{\lambda j, \lambda j+1, \dots , \lambda (j+1)-1\}\) for \(j=0,\dots ,s^3-1\). Xiao and Xu (2018) showed that designs generated from orthogonal arrays via level expansions tend to have attractive space-filling properties. According to Construction 1, the constructed OSOAs via level expansions tend to have attractive space-filling properties because these OSOAs are also based on orthogonal arrays of strength two.
References
Bingham D, Sitter RR, Tang B (2009) Orthogonal and nearly orthogonal designs for computer experiments. Biometrika 96:51–65
Fang KT, Li R, Sudjianto A (2006) Design and modeling for computer experiments. Chapman & Hall, Boca Raton
Fang KT, Liu MQ, Qin H, Zhou YD (2018) Theory and application of uniform experimental designs. Springer-Science Press, Singapore, Beijing
He Y, Cheng CS, Tang B (2018) Strong orthogonal arrays of strength two plus. Ann Stat 46:457–468
He Y, Tang B (2013) Strong orthogonal arrays and associated Latin hypercubes for computer experiments. Biometrika 100:254–260
He Y, Tang B (2014) A characterization of strong orthogonal arrays of strength three. Ann Stat 42:1347–1360
Hedayat AS, Sloane NJA, Stufken J (1999) Orthogonal arrays: theory and applications. Springer, New York
Hickernell FJ (1998) A generalized discrepancy and quadrature error bound. Math Comp 67:299–322
Johnson ME, Moore LM, Ylvisaker D (1990) Minimax and maximin distance designs. J Stat Plann Inference 26:131–148
Lin CD, Mukerjee R, Tang B (2009) Construction of orthogonal and nearly orthogonal Latin hypercubes. Biometrika 96:243–247
Liu HY, Liu MQ (2015) Column-orthogonal strong orthogonal arrays and sliced strong orthogonal arrays. Stat Sinica 25:1713–1734
McKay MD, Beckman RJ, Conover WJ (1979) Comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 21:239–245
Owen AB (1992) Orthogonal arrays for computer experiments, integration and visualization. Stat Sinica 2:439–452
Santner TJ, Williams BJ, Notz WI (2013) The design and analysis of computer experiments. Springer, New York
Shi C, Tang B (2020) Construction results for strong orthogonal arrays of strength three. Bernoulli 26:418–431
Steinberg DM, Lin DKJ (2006) A construction method for orthogonal Latin hypercube designs. Biometrika 93:279–288
Sun FS, Liu MQ, Lin DKJ (2009) Construction of orthogonal Latin hypercube designs. Biometrika 96:971–974
Sun FS, Wang Y, Xu H (2019) Uniform projection designs. Ann Stat 47:641–661
Tang B (1993) Orthogonal array-based Latin hypercubes. J Am Stat Assoc 88:1392–1397
Vazquez E, Bect J (2011) Sequential search based on kriging: convergence analysis of some algorithms. In: Proceedings of the 58th World Statistical Congress of the ISI, pp 1241–1250
Xiao Q, Xu H (2018) Construction of maximin distance designs via level permutation and expansion. Stat Sinica 28:1395–1414
Ye KQ (1998) Orthogonal column Latin hypercubes and their application in computer experiments. J Am Stat Assoc 93:1430–1439
Zhou YD, Tang B (2019) Column-orthogonal strong orthogonal arrays of strength two plus and three minus. Biometrika 106:997–1004
Acknowledgements
The authors are grateful to Editor Professor Werner G. Müller and two anonymous referees for their insightful comments and suggestions. We also thank Professors Boxin Tang and Yong-Dao Zhou for their valuable comments. This work was supported by the National Natural Science Foundation of China (Grant Nos. 11771220 and 11871033), National Ten Thousand Talents Program of China, Fundamental Research Funds for the Central Universities (63211090), and Natural Science Foundation of Tianjin (20JCYBJC01050). The authorship is listed in alphabetical order.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Proofs of theorems
Appendix: Proofs of theorems
Proof of Theorem 2
From (3) and (4), we have \(D^*= C^*R\), where \(C^*=(C_1^*, \dots ,\) \(C_p^*)\) and \(R=\mathrm{diag}\{V,\dots ,V\}\) with V repeating p times. Since \((a_i, a_j, b_j)\) is an OA of strength 3 for any \(i \ne j\), \(C^*\) is an OA of strength 2 with levels from \(\Omega (s)\). By noting that R is column-orthogonal, we have \({D^*}^T D^*=(C^* R)^T C^* R = R^T ({C^*}^T C^*) R = c_1 R^T R=c_2I_{2p}\), where \(c_1\) and \(c_2\) are two constants, and \(I_{2p}\) is the identity matrix of order 2p. This shows that \(D^*\) in (3) is column-orthogonal. So is D in (5).
Before showing the stratifications of D, we first derive the form of any column d of D in (5). Let \(a_i^*=a_i- (s-1)/2\) and \(b_i^*=b_i- (s-1)/2\) for \(i=1,\dots , m\). Note that the column \(d^*\) of \(D^*\) in (3) corresponding to d has the form \(d^*=c_1^*s^2 + c_2^*s \pm c_3^*,\) where \((c_1^*, c_2^*, c_3^*)\) is a copy of some \(( a_j^*, b_j^*,a_i^*)\) with \(i \ne j\). From (5), the column d of D has the form
where \(r_1=c_1^* +(s-1)/2\), \(r_2= c_2^* + (s-1)/2\) and \(r_3=\pm c_3^* + (s-1)/2\). Since \((c_1^*, c_2^*, c_3^*)\) is a copy of some \(( a_j^*, b_j^*, a_i^*)\) with \(i \ne j\), then \((r_1, r_2, r_3)\) is a copy of \(( a_j, b_j, a_i)\) or \(( a_j, b_j, s-1-a_i)\). Thus, all entries of \((r_1, r_2, r_3)\) take values in \(\{0, 1, \dots , s-1\} \times \{0, 1, \dots , s-1\} \times \{0, 1, \dots , s-1\}\). Therefore, we have that for \(i \ne j\), any column d of D in (5) has the form \(d=a_j s^2 + b_j s + a\) where \(a=a_{i}\) or \(a=s-1 - a_{i}\).
We now show the stratifications of D. For any two columns \(d_i=a_i s^2 + b_i s + a_{i'}\) and \(d_j=a_j s^2 + b_j s + a_{j'}\), let us show that the array \((d_i, d_{j})\) can be collapsed into an OA\((n,2,s^2 \times s, 2)\) and an OA\((n,2,s \times s^2, 2)\), that is to say, \((\lfloor d_i/s \rfloor , \lfloor d_j/s^2 \rfloor )=(a_i s +b_i, a_j)\) and \((\lfloor d_i/s^2 \rfloor , \lfloor d_j/s \rfloor )=(a_i, a_j s + b_j )\) are an OA\((n,2,s^2 \times s, 2)\) and an OA\((n,2,s \times s^2, 2)\), respectively. In fact, this is true by noting the following three facts: (i) \((a_i, a_j, b_j)\) is an OA(n, 3, s, 3) for any \(i\ne j\); (ii) \(x_1 s+x_2\) establishes a one-to-one correspondence between the \(s^2\) levels in \(\{0, 1, \dots , s^2-1\}\) and the \(s^2\) pairs \((x_1, x_2)\), where \(x_1, x_2 \in \{0, 1, \dots , s-1\}\); (iii) \(x_1 s^2 + x_2 s + x_3\) establishes a one-to-one correspondence between the \(s^3\) levels in \(\{0, 1, \dots , s^3-1\}\) and the \(s^3\) pairs \((x_1, x_2, x_3)\), where \(x_1, x_2, x_3 \in \{0, 1, \dots , s-1\}\). Therefore, D satisfies the property of stratifications in Definition 1. This completes the proof. \(\square \)
Proof of Theorem 4
From the definition of two-level OA and Construction 1, m must be a multiple of 4 and \(p= \lfloor (m-1)/2 \rfloor =(m-2)/2\). Therefore the number of columns for the constructed OSOA is \(m-2\). According to the structures of A and B in (6), A is an OA\((2m, m-1, 2, 3)\) and B is an OA\((2m, m-1, 2, 2)\). Since \(b_j\) is orthogonal to the interaction column \(a_i a_j\) for any \(i \ne j\), \((a_i, a_j, b_j)\) is an OA(2m, 3, 2, 3). Then from Theorem 3, the resulting design is an OSOA\((2m, m-2, 8, 3)\). The proof is completed. \(\square \)
Proof of Theorem 5
Note that \(A=(a_1, \dots ,a_m)\) and \(B=(b_1, \dots , b_m)\) with \(m=(s^{k-1})/(s-1)\). From Theorem 2, we only need to show \((a_i, a_j, b_j)\) is an OA(n, 3, s, 3) for any \(i \ne j\). To do so, we assume that \(b_j\) is the interaction column of \(a_i\) and \(a_j\), i.e.,
holds for some \(l, t \in \{1, \dots ,s-1 \}\). Note that \(a_i=b_i e_k\) and \(a_j=b_j e_k\). So Equation (8) is possible to hold only when \(l=s-1\). However, if \(l=s-1\), Equation (8) implies that \(b_i b_j^{s-1}=b_j^t\) for some \(t\in \{1, \dots ,s-1 \}\). This is impossible because \(b_i\) and \(b_j\) are two different columns of B. This completes the proof. \(\square \)
Rights and permissions
About this article

Cite this article
Li, W., Liu, MQ. & Yang, JF. Construction of column-orthogonal strong orthogonal arrays. Stat Papers 63, 515–530 (2022). https://doi.org/10.1007/s00362-021-01249-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00362-021-01249-w