
Abstract
We analyze lobbying as contest in which lobbyists exert effort to pull a policy outcome in a multidimensional space in their preferred directions. We prove existence and uniqueness of equilibrium and perform comparative statics on the cost of effort and policy utility of the lobbyists. As cost of effort increases, the equilibrium policy outcome and inefficiency (i.e., total effort expended) are constant. Assuming power utility, the equilibrium policy minimizes a social loss function that depends on curvature of utilities. As lobbyists become less tolerant of larger losses, the equilibrium policy outcome converges to the Rawlsian policy, which maximizes the payoff of the worst-off lobbyist, and inefficiency may become large or go to zero, depending on the configuration of ideal points. As lobbyists become less tolerant of smaller losses, the equilibrium outcome converges to the mean of the lobbyists’ ideal points, and inefficiency goes to zero.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider a finite set of lobbyists who compete in a contest by exerting pressure to influence the location of a policy outcome in a finite-dimensional policy space. Much of the literature on contest theory assumes that the final outcome is imposed by a single winner who is determined stochastically by effort exerted by contest participants: although the winner of the contest is affected by effort choices, the final outcome reflects only the preferences of the winner, independent of effort expended by losers (cf. Corchón 2007). In contrast, we view public policy as a continuous variable, and it is natural in this setting to expect that the final location of policy will be the result of a compromise, or a balance of forces, that reflects the efforts of all participants, so that the effort exerted by any one lobbyist generates externalities on all others. Thus, we model lobbying as a “tug of war,” where the policy outcome is the result of each lobbyist exerting force in her preferred direction; technically, it is a weighted combination of lobbyist ideal points, where weights are determined by effort choices via a standard contest success function, and effort is subject to a quadratic cost.
We assume a finite number of lobbyists with Euclidean preferences over a multidimensional policy space; thus, each lobbyist has an ideal policy and seeks to minimize the distance between the final policy outcome and her ideal point. The lobbyists simultaneously choose effort levels, and the resulting policy outcome is a convex combination of lobbyist ideals points, where the weight on each lobbyist’s ideal point depends on the lobbyist’s effort in proportion to the total effort expended. We interpret effort in a broad way, as encompassing a range of activities intended to influence policy in the preferred direction of the lobbyist: contributions to campaigns or independent expenditures in elections; threats to fund political opponents; writing of model bills to influence the content of legislation; sponsoring fund raising or inaugural events; support for think tanks or academic foundations to change elite views; or illegal activities such as outright bribes or extortion. Lobbyists representing different interests, even if from the same side of the political spectrum, may differ in the preferred direction of policy: for example, a petroleum company and a defense contractor may each generally prefer less government regulation, but the petroleum firm would place greater weight on reduction of exploration and drilling restrictions on government lands, while the defense contractor would place greater weight on increased defense spending. These differences will be reflected in different gradients for lobbyists representing these interests, and thus it becomes important to conduct the analysis under the general assumption of a multidimensional policy space.
Each lobbyist receives policy utility from the outcome realized, and each pays a quadratic cost of effort times a cost parameter that measures the responsiveness of policy to lobbying efforts. The cost parameter can proxy for a number of institutional factors, including reporting requirements, restrictions on the types of allowable lobbying expenditures, and caps on lobbying expenditures. More generally, viewing lobbyists as pressure groups that exert influence on electoral campaigns and public opinion to obtain preferred policy outcomes, the cost parameter can also incorporate disclosure requirements for contributions to campaigns and non-profit organizations; restrictions on independent expenditures to promote a candidate or party; tax deductions for contributions to non-profit, issue-advocacy organizations; access to large data bases containing detailed voter information; and the availability of cable news and social media outlets to facilitate messaging to voters.
We characterize the unique Nash equilibrium of the multidimensional game of tug of war as the unique solution to a particular system of equations. In general: the equilibrium policy outcome is unaffected by the cost parameter, total effort goes to zero as the cost parameter becomes large, and total effort increases without bound as the parameter goes to zero. To measure inefficiency, we look at the total cost of effort, and we find that this measure is independent of the cost parameter; that is, as the cost parameter changes, equilibrium effort levels adjust to maintain the same total cost of effort. We then specialize to the class of power utility functions, and we show that the equilibrium policy outcome minimizes a social loss function, where the loss of an individual lobbyist is measured as distance raised to a power depending on the curvature of policy utility. As lobbyists become less tolerant of larger losses (technically, as the coefficient of relative risk aversion increases), the unique equilibrium policy outcome converges to the Rawlsian optimum, which maximizes the payoff of the worst-off lobbyist, and inefficiency may become large or may go to zero, depending on the configuration of ideal points. As lobbyists become less tolerant of small losses, so that lobbying approximates an “all or nothing” competition, the equilibrium policy outcome converges to the mean of the individual ideal points, and inefficiency goes to zero. In addition, we discuss a number of extensions of the model, including heterogeneous cost of effort and a more general cost structure.
Although our leading interpretation of the model is lobbying, the continuous contest approach has other applications. For example, committee decision making could be viewed as a contest, in which members exert effort to pull the outcome of a meeting in their favored directions. This is especially true in unstructured settings, where the protocol governing discussion is informal, and the rules of interaction are not explicitly defined. While such unstructured environments are often modeled in terms of a dynamic bargaining game (Baron and Ferejohn 1989; Banks and Duggan 2000, 2006), our approach provides another possible model for the “black box” of committee decision making. For another example with two players, our model could capture leaders of two parties who seek to influence legislative outcomes by expending resources to influence bill language or voting in committees or floor votes, exerting effort to determine the legislative outcome in a continuous way. Relying on our extension to weighted lobbying, in Sect. 3, a related application with multiple players could be a parliament, in which parties pull policy in their preferred directions, with effort weighted by an increasing function of seat share, reflecting the influence of parties in the government formation process.
In the remainder of the paper, Sect. 2 provides an overview of the related literature. Section 3 formally presents the baseline lobbying game and establishes existence and uniqueness of equilibrium, along with comparative statics on the cost parameter. In Sect. 4, we examine the special case of power utility, which allows us to conduct comparative statics on preference parameters. We discuss the normative implications of our analysis in Sect. 5. Section 6 discusses a number of extensions of the baseline model, and Sect. 7 concludes. Proofs of supporting propositions are contained in the “Appendix”.
2 Related literature
Our paper is related to the exchange lobbying literature, where lobbying is treated as a quid pro quo between the lobbyist and the politician. In some of the early work on exchange theory, the competition is for the vote of a single voter, and the model is either similar to most of the work on contest theory, where the final outcome is imposed by a single winner who is determined stochastically by effort exerted by all the lobbyists (Tullock 1980), or lobbying is modeled as an all-pay auction, where bidders submit their bids simultaneously, and the highest bidder gets the prize (Hillman and Riley 1989; Baye et al. 1993, 1996; Che and Gale 1998). Others have also studied the sequential lobbying game in a legislative setting, where the lobbyists move sequentially to buy off a majority of the legislators. Groseclose and Snyder (1996) study the game in which two lobbyists move sequentially to compete for the votes of a continuum of legislators, and Banks (2000) studies the same process assuming a finite set of legislators. Both find a second-mover advantage, while Dekel et al. (2008) consider the infinite-horizon sequential lobbying game and find the second-mover advantage largely disappears, and the lobbying outcome is more open-ended. Nevertheless, the final outcome is still imposed by a single winner, namely, the lobbyist who offers the highest price.
Closer in spirit to our paper are lobbying models stemming from the common agency literature. Bernheim and Whinston (1986a, b) set the common agency framework, in which a finite number of principals each offer a menu of contracts to an agent to influence her action choice, and they show that truthful Nash equilibria maximize the aggregate utility of the principals and agent, and that these are essentially the only coalition-proof equilibria. Thus, in equilibrium, the forces exerted by the principals must cancel out, in a sense, similar to our model, but the nature of competition is quite different: in our analysis, there is no agent whose choice is endogenous to the model, and lobbyists exert force directly at quadratic cost, rather than by offering an agent monetary inducements as a function of her actions. In the case of power utility, our characterization on social losses sharply illustrates the distinct implications of the two approaches. We show that the equilibrium policy minimizes social losses, where the loss of an individual lobbyist is measured as foregone utility, multiplied by the square of distance to the policy outcome; see Eq. (8), below. In contrast, because the truthful equilibria of Bernheim and Whinston (1986a, b) maximize aggregate utility, they effectively minimize social losses by measuring individual loss as foregone utility alone. In sum, the nature of competition in our lobbying game places greater weight on deviations from the policy outcome by individual lobbyists, and this will be reflected in the fact that aggregate utility is lower in equilibria of the lobbying game, while lobbyists at a greater distance from the equilibrium policy are relatively advantaged.
Grossman and Helpman (1994) use the framework to study lobbying in the specific context of trade policy, Mitra (1999) extends Grossman and Helpman (1994) by endogenizing the interest group formation process, and Laussel and Le Breton (2001) characterize in detail the equilibrium payoffs of the common agency game. More recently, the literature has visited the topic of incomplete information in common-agency models of lobbying. Le Breton and Salanié (2003) characterize the conditions for an efficient outcome in a binary policy setting with uncertainty over a politician’s preference over social welfare, and Martimort and Semenov (2008) show that when there is uncertainty over a politician’s ideology, the lobbying outcome may be biased toward the politician’s preference and may not be efficient; however, in these settings, some lobbyists may turn out to be non-pivotal, and thus have no effect on the final policy outcome.
A distinguishing feature of our model is the nature of the externality generated by a lobbyist’s effort. Each lobbyist pulls the policy outcome in a different direction, and thus the externality generated by the efforts of lobbyists j and k may affect lobbyist i differentially, e.g., j’s effort may produce a positive externality to i, whereas k’s effort moves the outcome further from lobbyist i’s ideal point, producing a negative externality. For a fourth lobbyist, the externalities may be reversed, with j’s effort producing a negative externality and k’s a positive one. In short, externalities are “identity-dependent,” a feature of Linster’s (1993) generalized contest model and Esteban and Ray’s (1999) analysis of conflict and redistribution. In both of the latter papers, the outcome of the contest is a lottery over winners, and the utility of a lobbyist can depend on the identity of the winner. In particular, Esteban and Ray (1999) establish existence and, under weak conditions, uniqueness of equilibrium; their main focus is the effect of group sizes on the level and pattern of conflict, whereas we exploit the structure of our model to consider comparative statics on preferences and cost parameters of lobbyists.
Although the contest success function used in this paper has a standard functional form (cf. Skaperdas 1996), our use of it differs from the contest literature in that it determines a specific outcome in Euclidean space—rather than a lottery over contestants—as a continuous function of individual effort levels. In fact, if lotteries are viewed as elements of the unit simplex in \(\mathfrak {R}^{n}\), then the standard approach with n lobbyists also has a Euclidean structure: an outcome \(x=(x_{1},\ldots ,x_{n})\) consists of a vector of probabilities, where \(x_{i}\) is the probability that lobbyist i wins. Interpreting the model of Esteban and Ray (1999) in this way, the essential difference between their model of conflict and redistribution and our spatial contest is in the preferences of the lobbyists. As is standard, Esteban and Ray (1999) assume expected utility over lotteries and that each lobbyist’s ideal outcome is to win outright, so that in the Euclidean formulation, utilities over the simplex are linear, and ideal points of the lobbyists fall on the vertices of the simplex. In contrast, we impose standard spatial structure on lobbyist preferences, so that the marginal rate of substitution of one policy for another depends on the lobbyist’s relative satisfaction on the two dimensions—technically, utilities are strictly quasi-concave—and because the location of ideal points is arbitrary in our model, we allow for the possibility that the policy preferences of some lobbyists are closely aligned.
Some papers in the literature do consider models with a spatial structure (Konrad 2000; Epstein and Nitzan 2004; Münster 2006). In these papers, however, the positions of the players are determined endogenously in the first stage of the game, and the winner of the contest is determined stochastically in the second stage. In contrast, we fix the ideal points of the players, and we model the final outcome as a deterministic function of individual efforts, giving the model a structure something like a tug of war. Konrad and Kovenock (2005) analyze what they refer to as a tug of war, but they model a sequence of all-pay auctions in which two players attempt to pull a state variable to their preferred terminal points over time. In contrast, drawing an analogy to the well-known game, we model multiple lobbyists moving simultaneously, each exerting force on a segment of rope, and all segments meeting at a common nexus. The goal of each lobbyist is to pull the nexus point as close to her ideal point as possible, and a Nash equilibrium of the game then corresponds to a location of this nexus that is stable under the forces exerted by the n lobbyists. The literature appears to have omitted spatial contests with this strategic structure.
3 Lobbying game
Assume n lobbyists, denoted \(i=1,\ldots ,n\), simultaneously choose effort levels \(\alpha _{i} \ge 0\) to determine an outcome \(x^{*}\) in d-dimensional Euclidean space, \(\mathfrak {R}^{d}\). Each lobbyist i has an ideal point \(\hat{x}^{i} \in \mathfrak {R}^{d}\), and effort levels determine the policy outcome via a contest success function with a standard functional form,
Intuitively, each lobbyist pulls the policy outcome toward her ideal point, the weight on that outcome being determined by the ratio of individual to total effort, as though lobbyists play a multidimensional game of tug of war over policy outcomes. When all lobbyists exert zero effort, the above expression is not well-defined, and in this case, we set \(x^{*}\) equal to an arbitrary status quo outcome in the convex hull of ideal points. To avoid trivial cases, we will assume that at least two lobbyists have distinct ideal points; this renders the choice of status quo immaterial.
Payoffs of the lobbying game are determined by a common loss function applied to the distance of the policy outcome from a lobbyist’s ideal point, minus a quadratic cost of effort; that is, for some twice differentiable function \(u :\mathfrak {R}_{+} \rightarrow \mathfrak {R}\), each lobbyist i’s payoff is \(u(\Vert \hat{x}^{i}-x^{*}\Vert )-c\alpha _{i}^{2}\). We impose the following assumptions on payoffs; in Assumption 2 and elsewhere, it is understood that the outcome \(x^{*}\) is a function of effort choices expressed in (1).
Assumption 1
For all \(z>0\), \(u'(z) < 0\).
Assumption 2
For all \(\alpha _{j}\), \(j\ne i\), \(u (\Vert x^{*} - \hat{x}^{i} \Vert ) - c\alpha _{i}^{2}\) is quasi-concave in \( \alpha _{i}\).
Assumption 3
For all \(z>0\), \(u''(z) z+ 2u'(z) < 0\).
Assumption 1, in the current context, is a differentiable formulation of strict quasi-concavity. Assumption 2 is a standard condition used to guarantee existence of Nash equilibria in pure strategies, and Assumption 3, which is used in the uniqueness proof, limits the extent of non-concavity of the lobbyists’ utilities. An obvious sufficient condition for the latter assumptions is concavity—specifically, \(u''\le 0\)—but the conditions hold even more generally. In Sect. 2, we show that they hold for power utility \(u(z)=-z^{r}\) with arbitrary positive parameter \(r>0\). Note that the power function is actually convex for \(r<1\), showing that the analysis can accommodate substantially non-concave utility over distance.
Given the effort levels of the other lobbyists, lobbyist i’s best response problem is
We focus on pure strategy Nash equilibria of the lobbying game, and by the assumption that at least two lobbyists have distinct ideal points, it is immediate that all equilibria feature positive total effort, i.e., \(A \equiv \sum _{i}\alpha _{i}>0\) in equilibrium. Furthermore, it is clear that if \(x^{*}=\hat{x}^{i}\) in equilibrium, then it must be that lobbyist i exerts zero effort, i.e., \(\alpha _{i}=0\).
For every other lobbyist i such that \(x^{*} \ne \hat{x}^{i}\), optimal effort must satisfy the following first order condition:
with equality if \(\alpha _{i}>0\). By Assumption 1, the left-hand side of the above inequality is positive, and we conclude that \(\alpha _{i}>0\) for all i with \(x^{*}\ne \hat{x}^{i}\). Thus, we have
for all such lobbyists. Substituting (2) into the definition of \(x^{*}\) in (1), it follows that in equilibrium, we must have
where we sum only over lobbyists i for whom \(x^{*} \ne \hat{x}^{i}\); we use this convention when summing over derivatives of utility functions throughout the paper, without further mention. Simplifying further, we can then characterize the solution to the lobbyists’ first order conditions by a system of d equations in d unknowns: letting \(\tilde{N}\) consist of the lobbyists such that \(\hat{x}^{i}=x^{*}\), an equilibrium policy outcome \(x^{*}\) must solve
In words, the equilibrium policy outcome must balance the forces exerted on it, where each lobbyist exerts force in the direction of her ideal point \(\hat{x}^{i}\), with magnitude equal to the squared distance to \(\hat{x}^{i}\) weighted by the marginal utility of distance. For the case of concave u, this means that in equilibrium, lobbyists further from the policy outcome \(x^{*}\) exert greater effort, implying that \(x^{*}\) will resist being too distant from the ideal point of the furthest lobbyist; we return to this topic in Theorem 5 of the next section.
Our main result is that the lobbying game admits a unique equilibrium. The proof of uniqueness proceeds by showing that the system in (3) has at most one solution, after which the result follows from the above first-order analysis. An interesting feature of (3) is that the cost parameter c does not appear in this system of equations, from which we conclude that the equilibrium policy outcome is independent of c.
Theorem 1
Under (A1)–(A3), the lobbying game admits a unique Nash equilibrium, and the equilibrium policy outcome is characterized by the system of equations in (3) and is independent of the cost parameter c.
Proof
The existence argument must account for the facts that the policy outcome \(x^{*}\) is discontinuous at \((\alpha _{1},\ldots ,\alpha _{n})=0\) and that the lobbyists’ strategy sets are unbounded above. To address the latter difficulty, note that the outcome \(x^{*}\) always belongs to the convex hull of \(\{\hat{x}^{1}, \ldots , \hat{x}^{n}\}\), and since u is quasi-concave in x, it follows that the minimum of \(u(\Vert \hat{x}^{i}-x^{*}\Vert )\) over profiles \((\alpha _{1},\ldots ,\alpha _{n})\) is achieved when some lobbyist, say \(j_{i}\), exerts positive effort and all others exert zero effort. That is, the worst feasible outcome for lobbyist i is \(\hat{x}^{j_{i}}\); of course, the best feasible outcome for i is \(\hat{x}^{i}\). Let \(\overline{a}\) be such that for all lobbyists i, we have
so that each lobbyist would prefer to choose zero effort and obtain the worst possible outcome, rather than receive the best possible outcome while exceeding the level \(\overline{a}\). Clearly, an equilibrium of the lobbying game with strategy sets restricted to the compact interval \([0,\overline{a}]\) for all lobbyists will persist as an equilibrium of the unrestricted game.
To address the discontinuity of payoffs, we invoke Reny’s (1999) Theorem 3.1 to obtain an equilibrium of the restricted game, and to this end, we must verify his condition of better-reply security. Write \(x^{*}(\alpha )\) to bring out dependence of the policy outcome on the profile \(\alpha =(\alpha _{1},\ldots ,\alpha _{n})\) of effort levels. Let \(\Gamma \) be the closure of the graph of the vector payoff function of the game, i.e.,
Because payoffs are continuous at every profile of effort levels not equal to the zero vector, it suffices to show that for every \((y_{1},\ldots ,y_{n})\) with \((0,y_{1},\ldots ,y_{n}) \in \Gamma \), some lobbyist i has a profitable deviation to a positive effort level, \(\alpha _{i}>0\). Indeed, for such a vector \((y_{1},\ldots ,y_{n})\), there is at least one lobbyist i whose payoff is less than the payoff from the ideal outcome, i.e., \(y_{i}<u(0)\). For every deviation \(\alpha _{i}>0\), the resulting outcome is the lobbyist’s ideal point, \(x^{*}(\alpha _{i},0_{-i})=\hat{x}^{i}\). Then for \(\alpha _{i}>0\) sufficiently small, we have
as required. Because the outcome \(x^{*}\) is continuous at \((\alpha _{i},0_{-i})\), there exists \(\epsilon >0\) such that for all \(\alpha _{-i}=(\alpha _{j})_{j \ne i} \in [0,\epsilon )^{n-1}\), we have \(u(x^{*}(\alpha _{i},\alpha _{-i}))-c\alpha _{i}^{2}>y_{i}\). Thus, Reny’s theorem delivers existence of an equilibrium. Necessity of (3) follows from first order arguments above. Sufficiency follows from the fact that Eq. (3) admits at most one solution, as argued below.
To establish that Eq. (3) has a unique solution, we define a function \(\phi _{i} :\mathfrak {R}^{d} \rightarrow \mathfrak {R}\) for each lobbyist i by
Note that if \(x \ne \hat{x}^{i}\), then \(\phi _{i}\) is differentiable at x. Next, observe that if there are two solutions to (3), say \(x^{*}\) and \(x^{**}\), then the equality
must hold for the direction \(t=\frac{1}{\Vert x^{**}-x^{*}\Vert }(x^{**}-x^{*})\) at both \(\beta =0\) and \(\beta =\Vert x^{**}-x^{*}\Vert \). Thus, to preclude the possibility of multiple solutions, it suffices to show that \(t \cdot \phi _{i}(x^{*}+\beta t)\) is strictly decreasing in \(\beta >0\).
Given \(\beta \) such that \(\hat{x}^{i} \ne x^{*}+\beta t\), the expression in question is differentiable as a function of \(\beta \), and we claim that its derivative is negative. Indeed, define \(\xi ^{i}(\beta ) = x^{*}+\beta t\), and write the derivative of \(t \cdot \phi _{i}(\xi ^{i}(\beta ))\) with respect to \(\beta \) as the sum \(\sum _{i}(A_{i}+B_{i}+C_{i})\), where for each lobbyist i, we define
By Assumption 1, we have \(A_{i}+B_{i}+C_{i}<0\) when \(t \cdot \xi ^{i}(\beta )=0\), so consider the remaining case. Using the fact that \(z+\frac{1}{z} \ge 2\) for all \(z >0\), we have
Therefore, with Assumption 1, we have
where the second inequality follows from Assumption 3. We conclude that the derivative of \(t \cdot \phi _{i}(\xi ^{i}(\beta ))\) is negative, as claimed.
In case \(\beta \) is such that \(\hat{x}^{i} = x^{*}+\beta t\), then \(\phi _{i}(\xi ^{i}(\beta ))\) may not be continuous at \(\beta \), but we argue that the function \(t \cdot \phi _{i}(\xi ^{i}(\beta ))\) jumps down at any point of discontinuity. It suffices to show that for \(\beta '< \beta < \beta ''\), we have
By Assumption 1, this follows if
Since \(\xi ^{i}(\beta )=\hat{x}^{i}\), the above inequalities hold if and only if
or equivalently,
which holds by \(\beta '-\beta< 0 < \beta ''-\beta \). We conclude that the expression \(t \cdot \phi _{i}(\xi ^{i}(\beta ))\) is strictly decreasing in \(\beta >0\) for each lobbyist i. This implies that there is a unique solution to (3), and thus a unique Nash equilibrium of the lobbying game, as required. \(\square \)
An implication of Theorem 1 is that the unique equilibrium policy outcome is independent of the lobbyists’ cost parameter. Summing over i in Eq. (2) and solving for the equilibrium total effort level, we directly obtain:
Substituting this expression back into (2), we see that the equilibrium effort level of each lobbyist i with \(\hat{x}^{i} \ne x^{*}\) varies inversely with the cost parameter:
Since the policy outcome \(x^{*}\) in the right-hand side of the above expression is constant as the cost parameter c varies, the effort level of all such lobbyists increases without bound as c becomes small, and effort goes to zero as c becomes large.
As our measure of equilibrium inefficiency, however, we use the total cost of effort, i.e., \(c\sum _{i}\alpha _{i}^{2}\), which we can obtain from (4), as follows:
Interestingly, with the observation that the equilibrium policy outcome \(x^{*}\) is independent of the cost parameter, the total cost of effort is also constant in c. Thus, like the equilibrium policy outcome, inefficiency depends on modeling primitives only through the system of equations in (3), and effort levels adjust to changes in c so as to maintain Eq. (5). We have thus proven the following theorem.
Theorem 2
In the lobbying game, as the cost parameter c becomes large, equilibrium effort goes to zero, and as c becomes small, for all lobbyists i with \(\hat{x}^{i} \ne x^{*}\), equilibrium effort increases without bound, i.e., \(\lim _{c \rightarrow \infty }\alpha _{i}=0\) and \(\lim _{c\rightarrow 0}\alpha _{i}=\infty \). Moreover, the total cost of effort is independent of c and given by the expression in (5).
To gain insight into the nature of equilibrium policy outcomes, we consider two simple functional forms. First, assume utility over distance is linear, i.e., \(u(z)=-z\). Then Eq. (3) reduces to
and thus in the one-dimensional special case, the equilibrium outcome equalizes the total, over ideal points of the lobbyists, of squared distance from \(x^{*}\) to the left and to the right of this outcome. Equivalently, we can write
so that the equilibrium policy outcome \(x^{*}\) is a weighted combination of ideal points, with weights equal to the ratio of a lobbyist’s distance to \(x^{*} \) over the total distance. In this case, total effort is given by
Next, assume quadratic utility, i.e., \(u(z) = -z^{2}\), so that Eq. (3) reduces to
so that in one dimension, the equilibrium outcome equalizes the total of cubed distance to \(x^{*}\) to the left and to the right of this outcome. Equivalently,
and total effort is given by
so that total effort is the standard deviation of individual distance to \(x^{*}\), normalized by \(\sqrt{n/c}\).
4 Power utility
In this section, in order to understand the role of payoffs in the determination of the equilibrium policy outcome and the magnitude of inefficiency in the lobbying game, we assume power utility of the form \(u(z) = -z^{r}\) for some \(r > 0\), so that we can control the lobbyists’ sensitivity to policy losses by the parameter r. Note that the coefficient of relative risk aversion is \(r - 1\), so that when \(r>1\), lobbyists are risk averse in policy distance; and when \(r<1\), lobbyists are risk loving in distance. See Fig. 1, which depicts a one-dimensional policy space with three lobbyists, located at 0, .75, and 1. In the upper panel, r is close to zero, so that utility becomes increasingly steep near the lobbyist’s ideal point and flat at outcomes distinct from the ideal point, so that the lobbyist is increasingly indifferent toward outcomes that are not ideal. In other words, the competition becomes “all-or-nothing,” with lobbyists caring only about achieving their own ideal policy outcomes. In the lower panel, r is high, so that lobbyists’ utility falls off rapidly as policy moves away from their ideal points. For an example, if a domestic firm is lobbying for import restrictions (e.g., tariffs or inspection requirements), then r could reflect the degree of product differentiation in the market, where r close to zero would correspond to homogeneous outputs and high r to highly differentiated output.Footnote 1

Power utility
We will apply the equilibrium analysis of the previous section, but we must first confirm that power utility with \(r>0\) satisfies (A1)–(A3). Clearly, it satisfies (A1), and the next result verifies (A2) and (A3) as well.
Proposition 1
The lobbying game with power utility and \(r > 0\) satisfies (A1)–(A3).
Thus, Theorems 1 and 2 indeed apply to the current setting, and the unique Nash equilibrium policy outcome of the lobbying game is given by the solution to the equation
which specializes Eq. (3) to the power utility case. In turn, the equilibrium effort of lobbyist i is determined by Eq. (4), which becomes:
In the power utility case, examination of (6) yields an alternative characterization of the equilibrium outcome, for the equation coincides with the first order condition of the minimization problem
Since the objective function above is strictly convex, it follows that the first order condition is sufficient for a global minimum; and since the equilibrium policy outcome satisfies the first order condition for (8), it is therefore the unique solution to the problem. In sum, the equilibrium policy outcome of the lobbying game minimizes a social loss function, in which the loss of each lobbyist is calculated as distance to the policy raised to the power \(r+2\).
Theorem 3
In the lobbying game with power utility and \(r>0\), the unique equilibrium outcome \(x^{*}\) solves the minimization problem (8).
Theorem 3 allows us to analyze the properties of equilibrium policy outcomes through a well-behaved optimization problem, and it provides a straightforward avenue to computation of equilibria in the model. We first apply this observation to the case in which lobbyists become less tolerant of policy losses closer to their ideal points, i.e., \(r\rightarrow 0\). Then \(r+2 \rightarrow 2\), and applying the theorem of the maximum to (8), we conclude that the limit of equilibrium policy outcomes minimizes the sum of squared distance to the lobbyists’ ideal points. Thus, the limiting policy is the mean of the lobbyists’ ideal points; moreover, by (7), total effort goes to zero, and equilibrium inefficiency goes to zero as well. In Fig. 1, the mean of the three ideal points is \(x=.583\), and as lobbyists place greater weight on losses close to their ideal points, as in the top panel, equilibrium outcomes converge to this policy.
Theorem 4
In the lobbying game with power utility and \(r > 0\), the limit of equilibrium policy outcomes as \(r \rightarrow 0\) is the mean of the lobbyists’ ideal points, and total effort goes to zero as \(r \rightarrow 0\), i.e., \(\lim _{r \rightarrow 0} x^{*} = \frac{1}{n}\sum \hat{x}^{i}\) and \(\lim _{r \rightarrow 0}A =0\).
Theorem 4 establishes that as r goes to zero, equilibrium outcomes balance the lobbyists’ preferences by converging to the mean of their ideal points. Lobbyists whose ideal points are distinct from the mean fail to achieve their ideal outcomes and thus expend vanishingly small effort in equilibrium, and lobbyists with ideal points at the mean (if any) achieve their ideal outcome with effort that also goes to zero.
Next, we show that as lobbyists become less tolerant of policy losses further from their ideal points, i.e., \(r \rightarrow \infty \), the equilibrium policy outcome converges to the policy that maximizes the minimum utility of the lobbyists. That is, it converges to the maximal element of the Rawlsian social welfare ordering, \(x^{R} = \hbox {argmax}_{x} \min _{i} u(\Vert x - \hat{x}^{i} \Vert )\). Furthermore, we show that total effort may or may not become arbitrarily large, depending on the configuration of ideal points. Before proceeding to the analysis, we establish that the Rawlsian policy is uniquely defined, so that the limit of equilibria is pinned down uniquely as risk aversion increases. Uniqueness of the Rawlsian policy is established in the following mathematical result, which is formulated in general terms for arbitrary, strictly quasi-concave functions, and does not rely on functional form assumptions.
Proposition 2
Let \(f_{i} :\mathfrak {R}^{d} \rightarrow \mathfrak {R}\), \(i=1,\ldots ,n\), be arbitrary, strictly quasi-concave functions. Then
has at most one solution.
In one dimension, the Rawlsian policy is easily characterized as the average of the most extreme ideal points, i.e.,
In particular, it belongs to the convex hull of the ideal points of lobbyists who are worst off at \(x^{R}\). The next proposition gives a characterization of the Rawlsian policy that formalizes and generalizes this insight; it does not depend on the power utility functional form, and thus it is stated for the general lobbying game.
Proposition 3
In the lobbying game, a policy x is the Rawlsian policy, \(x^{R}\), if and only if it is a convex combination of the ideal points of the lobbyists who are worst off at x, i.e., \(x=x^{R}\) if and only if
where
is the set of lobbyists with lowest utility at x.
In multiple dimensions, Rawlsian policy provides a selection from the Pareto set that is continuous as a function of lobbyist ideal points. In Fig. 2, we consider a two-dimensional policy space and three lobbyists, and we depict four arrangements of ideal points for the lobbyists. In the first panel, the ideal points form an equilateral triangle, and the Rawlsian policy is the centroid of the triangle, equalizing the utility of the three lobbyists. As lobbyist 3’s ideal point moves in, the Rawlsian policy shifts to the left, and at first, utilities are again equalized among the three. Eventually, lobbyist 3’s ideal point is so close to the other two that the Rawlsian policy lies on the line between the ideal points of lobbyists 1 and 2, equalizing their utility, while the utility of lobbyist 3 is higher.

Rawlsian policy in multiple dimensions
We now proceed to the analysis of equilibrium policy outcomes when the coefficient of relative risk aversion becomes large, and we show that equilibrium policy outcomes converge to the Rawlsian policy, \(x^{R}\). The limit of total effort turns out to depend on the distance of the worst-off lobbyists from the Rawlsian policy: if this distance is greater than or equal to one, then total effort goes to infinity; and otherwise, it goes to zero. In both cases, although effort levels increase without bound for all lobbyists or go to zero for all lobbyists, we can compare effort levels of individual lobbyists as well. Letting \(z_{i} = \Vert \hat{x}^{i}-x^{*}\Vert \) be the distance between the lobbyist i’s ideal point and the equilibrium policy outcome, we can manipulate the first order condition in (2) for lobbyists i and j to derive a restriction on ratios of efforts,
so that lobbyists further from \(x^{*}\) must exert greater effort, with the ratio of efforts increasing in r. Now, consider any two lobbyists i and j with \(\Vert \hat{x}^{i}-x^{R}\Vert > \Vert \hat{x}^{j}-x^{R}\Vert \). Since \(x^{*} \rightarrow x^{R}\), Eq. (9) then implies that the ratio \(\alpha _{i}/\alpha _{j}\) of equilibrium efforts goes to infinity as \(r \rightarrow \infty \). We conclude that lobbyists further from the Rawlsian policy exert arbitrarily great effort relative to those who are closer, consistent with the assumption of decreasing tolerance of policy losses further from ideal.
Theorem 5
In the lobbying game with power utility and r > 0, the limit of equilibrium policy outcomes as \(r \rightarrow \infty \) is the Rawlsian policy, i.e., \(\lim _{r \rightarrow \infty }x^{*}=x^{R}\). If \(\max _{i}\Vert \hat{x}^{i}-x^{R}\Vert \ge 1\), then total effort increases without bound as \(r \rightarrow \infty \), i.e., \(\lim _{r \rightarrow \infty }A=\infty \); and if \(\max _{i}\Vert \hat{x}^{i}-x^{R}\Vert < 1\), then total effort goes to zero as \(r \rightarrow \infty \), i.e., \(\lim _{r \rightarrow \infty }A=0\).
Proof
Because equilibrium policy outcomes belong to the convex hull of the lobbyists’ ideal points, and this set is compact, we can assume without loss of generality that equilibrium outcomes converge as \(r \rightarrow \infty \), so that \(x^{*} \rightarrow \tilde{x}\) for some outcome \(\tilde{x}\). We argue that \(\tilde{x} = x^{R}\). Let \(N_{r}\) be the set of worst-off lobbyists given parameter r, i.e.,
where \(x^{*}\) implicitly depends on r through Eq. (6). Given that the number of lobbyists is finite, we may go to a subsequence (still indexed by r) such that there exists some lobbyist k such that \(k \in N_{r}\) for all r in the subsequence. Since the ratios \(\Vert x^{*}-\hat{x}^{i}\Vert / \Vert x^{*}-\hat{x}^{k}\Vert \) lie in the unit interval [0, 1], so do the powers \((\Vert x^{*}-\hat{x}^{i}\Vert / \Vert x^{*}-\hat{x}^{k}\Vert )^{r}\), so we can go to a further subsequence (still indexed by r) such that for all lobbyists \(i \ne k\), the limit
is well-defined. Now, rewrite Eq. (6) as:
Taking limits in (10), we obtain the expression
which after manipulation becomes
Let \(\gamma _{k} = \frac{1}{1 + \sum _{i \ne k} \rho _{i}}\), and for \(i \ne k\), let \(\gamma _{i}=\frac{\rho _{i}}{1 + \sum _{j \ne k} \rho _{i}}\). Then we have
Note that for every lobbyist j, if \(\Vert \tilde{x} - \hat{x}^{j} \Vert < \Vert \tilde{x} - \hat{x}^{k} \Vert \), then \(\rho _{j}=0\); equivalently, if \(\rho _{j} > 0\), then \(\Vert \tilde{x} - \hat{x}^{j} \Vert = \Vert \tilde{x} - \hat{x}^{k} \Vert \). We conclude that the limit \(\tilde{x}\) of equilibrium policy outcomes is a convex combination of the ideal points of the lobbyists who are worst off at \(\tilde{x}\). Therefore, by Proposition 3, \(x^{*} \rightarrow \tilde{x}=x^{R}\), proving the first part of the theorem.
For the second part of the theorem, note that for every lobbyist i, we have
First assume that \(\max _{i}\Vert \hat{x}^{i}-x^{R}\Vert \ge 1\). Going to a subsequence (still indexed by r) if necessary, we may choose a lobbyist j such that \(\rho _{j}=\max _{i}\rho _{i}\) for every r in the subsequence. Then in the above expression for equilibrium effort, the denominator goes to zero, while the numerator is bounded below by one, and we have \(\lim _{r \rightarrow \infty }\alpha _{j}=0\), and thus total effort increases without bound. Next, assume that \(\max _{i}\Vert \hat{x}^{i}-x^{R}\Vert < 1\). For each lobbyist i, the sum \(\sum _{j}(\frac{\Vert \hat{x}^{j}-x^{*}\Vert }{\Vert \hat{x}^{i} - x^{*}\Vert } )^{r}\) includes one term equal to one, and thus the summation is bounded below by one. Thus, the limit of equilibrium effort is determined by \(r\Vert \hat{x}^{i}-x^{*}\Vert ^{r}\), which goes to zero, and total effort goes to zero, as required. \(\square \)
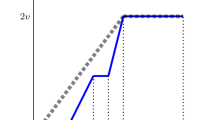
In Fig. 1, the Rawlsian policy is \(x=.5\), and as lobbyists place greater weight on losses from their ideal points, as in the bottom panel, equilibrium outcomes converge to this policy. By Theorem 3, it is straightforward to compute equilibrium policy outcomes for arbitrary r, and Fig. 3 depicts this relationship graphically, using the parameterization from the earlier figure, i.e., \(n=3\), \(\hat{x}^{1}=0\), \(\hat{x}^{2}=.75\), and \(\hat{x}^{3} = 1\). Of course, Theorems 4 and 5 are evidenced in policies converging to the mean ideal point as \(r\rightarrow 0\), and to the Rawlsian policy as \(r\rightarrow \infty \), respectively.

Comparative statics on r
5 Normative implications
We have seen that equilibrium policy outcomes have familiar normative properties in the special case of power utility, with \(r \rightarrow \infty \), considered in Theorem 5: in this setting, equilibrium policies converge to the Rawlsian policy. In this section, we compare equilibrium policies of the lobbying game to two other normative solutions to the collective choice problem of the lobbyists. To begin, we say an alternative x is a majority core alternative if for all \(y \in \mathfrak {R}^{d}\), it is not the case that a majority of lobbyists prefer y to x, i.e.,
In one dimension, assuming the number n of lobbyists is odd, it is known that the unique majority core alternative is the median ideal point; adding the assumption that the lobbyists’ ideal points are distinct, this means that the core alternative equalizes the number of lobbyists with ideal points to the left and right of the alternative. In multiple dimensions, Plott (1967) shows that under weak conditions, the majority core (if nonempty) consists of the alternative (there can be at most one) satisfying a restrictive symmetry assumption: an alternative x satisfies radial symmetry when for every direction \(t \in \mathfrak {R}^{d}\), the number of lobbyists with gradients pointing in direction t equals the number with gradients pointing in direction \(-t\). In the present context, letting \(\tilde{N}\) denote the set of lobbyists i such that \(\hat{x}^{i}=x\), this is
A key distinction between equilibrium policy outcomes of the lobbying game and the majority core alternative (if one exists) is that the latter concept is ordinal; in contrast, as demonstrated by (3), the location of the equilibrium policy depends on the curvature of policy utility u. This dependence arises because a lobbyist’s marginal rate of substitution of effort for policy depends on the magnitude of the derivative \(u'(\Vert \hat{x}^{i}-x^{*}\Vert )\), and not just its sign. In general, radial symmetry is neither necessary nor sufficient for a policy to be the equilibrium outcome of the lobbying game. However, if we strengthen radial symmetry substantially, then we can obtain a sufficient condition: say an alternative x satisfies exact radial symmetry if for every \(y \in \mathfrak {R}^{d}\), the number of lobbyists with ideal point at \(x+y\) equals the number with ideal point at \(x-y\), i.e.,
The next result establishes that if an alternative x satisfies exact radial symmetry, then it is the unique equilibrium outcome of the lobbying game. The proof derives a contradiction from the negation of the consequent: if the unique equilibrium outcome \(x^{*}\) does not equal x, then exact radial symmetry implies that the reflection of \(x^{*}\) through x, namely \(2x-x^{*}\), also satisfies (3), so it is an equilibrium outcome—but this contradicts uniqueness.
Proposition 4
In the lobbying game, if a policy x satisfies exact radial symmetry, then x is the unique equilibrium policy outcome.
An implication of Proposition 4 is that when there is a policy that satisfies exact radial symmetry, the equilibrium policy outcome x of the lobbying game is independent of the curvature of utility, r; this is depicted in the left-hand side of Fig. 4, where exact radial symmetry is satisfied at the ideal point of lobbyist 5, and this is the unique majority core policy. By Theorems 4 and 5, it follows that x is not only the mean of the lobbyists’ ideal points (which is clear), but it is also the Rawlsian policy. In the right-hand panel of the figure, policy x satisfies radial symmetry, but not in the exact sense. By Theorem 3, the equilibrium policy outcome minimizes social loss, as in (8), and now the equilibrium policy does depend on curvature of utilities: when r is close to zero, the equilibrium policy is close to the mean ideal point, at the center of the quadrilateral formed by the ideal points of lobbyists 1, 2, 3, 4; and when r grows large, equilibrium policies converge to the Rawlsian policy, \(x^{R}\), located below the mean. The set of equilibrium policies that is swept out as \(r>0\) varies is depicted by the gray line segment in the right-hand panel.

Radial symmetry: exact and inexact
A well-known implication of Plott’s theorem is that, assuming an odd number of lobbyists and at least two policy dimensions, the majority core is empty for generic arrangements of lobbyist ideal points. Clearly, equilibria of the lobbying game exist generally, so the comparison with the majority core is limited. An alternative formulation of the majority core, which permits a more robust comparison, is provided by the geometric median, which is any alternative that minimizes total distance to the lobbyists’ ideal points, i.e., any solution to
This is known as the “Fermat–Weber problem,” and when the number of lobbyists is odd, it admits a unique solution. Moreover, Chung and Duggan (2018) show that when there is a majority core alternative, it coincides with the geometric median, and thus it provides a continuous extension of the majority core that is well-defined for all arrangements of ideal points.Footnote 2 Of course, the unique solution to the problem of minimizing squared distance,
is the mean of the lobbyists’ ideal points. Interestingly, the solutions of both of the above problems play roles in statistical estimation: viewing the ideal points \(\hat{x}^{1},\ldots ,\hat{x}^{n}\) as a finite sample drawn independently from an underlying distribution, the sample mean is a well-known estimator of the mean of the true distribution, and the geometric median is a robust estimator of centrality. Relative to the geometric median, the mean is more sensitive to outliers, and thus it is the preferred estimator only if the analyst puts substantial weight on avoiding large deviations from the estimate.
Assuming power utility, Theorem 3 shows that equilibrium policy outcome of the lobbying game minimizes a social loss function, where the loss of a particular lobbyist is measured by distance to the policy raised to the power \(r+2\); formally, the equilibrium policy solves
We obviously obtain the mean ideal point when \(r\downarrow 0\) approaches zero. For higher values of the parameter r, the equilibrium policy outcomes generate a family of solutions that extend the mean by placing arbitrary weight \(r+2>2\) on deviations from the policy outcome, implicitly reflecting greater weight on the losses of individuals further from the chosen policy. Statistically, this family corresponds to a class of centrality measures that place greater weight on outliers—making them impractical as estimators, but interesting conceptually. An implication of our analysis is that as \(r \rightarrow \infty \), i.e., this class of measures is driven entirely by outliers, in the precise sense that they converge to the Rawlsian point, which minimizes the greatest distance to realized sample points.
6 Extensions
We have presented a simple version of the lobbying game to facilitate exposition, but there are many possible extensions that could be considered. A first, and easy, extension of the model is to allow the cost parameter \(c_{i}>0\) to vary across lobbyists, in which case Eq. (3) takes the form
so that lobbyists with lower cost have greater weight, and total effort is:
Solving for the equilibrium effort of lobbyist i, we obtain:
In contrast to the earlier analysis, the equilibrium outcome can now be affected by relative changes in cost parameters. Because the outcome \(x^{*}\) is restricted to the convex hull of the lobbyists’ ideal points, a compact set, it follows that as lobbyist i’s cost parameter \(c_{i}\) becomes large, her equilibrium effort goes to zero. Moreover, if we fix the parameters of all other lobbyists and let \(c_{i}\rightarrow 0\), then lobbyist i’s equilibrium effort goes to infinity, and the equilibrium outcome converges to i’s ideal point.
A second, and related, extension is to consider a generalized contest success function in which lobbyist ideal points have exogenously given weights, representing the influence of the lobbyist. Formally, each lobbyist i is associated with a positive weight \(\beta _{i}>0\), and given effort levels \(\alpha _{1},\ldots ,\alpha _{n}\), the policy outcome determined is
The first order condition for each lobbyist i who chooses positive effort \(\alpha _{i}>0\) becomes
and Eq. (2) becomes
In equilibrium, we must have
and, analogous to (3), the system of equations characterizing the equilibrium becomes
In contrast to heterogeneity in the cost parameter, the lobbyists’ weights are squared in the above system, magnifying differences in weights across lobbyists. If we normalize weights to sum to one, we can analyze equilibrium policy outcomes as one lobbyist’s weight increases compared to all others: letting \(\beta _{i} \rightarrow 1\), it follows from the above equilibrium equation that \(u'(\Vert \hat{x}^{i}-x^{*}\Vert )\Vert \hat{x}^{i}-x^{*}\Vert (x^{*}-\hat{x}^{i}) \rightarrow 0\), so that, predictably, the equilibrium outcome converges to the ideal policy of the dominant lobbyist.
A third extension generalizes the assumption of quadratic cost of effort, so that lobbyist i’s payoff is \(u(\Vert \hat{x}^{i}-x^{*}\Vert )-c\alpha _{i}^{k}\), where \(k > 1\) is a cost parameter. Of course, the linear cost case is approximated by \(k \downarrow 1\). Then the first order condition for lobbyist i with \(\hat{x}^{i} \ne x^{*}\) is:
Following the logic above, Eq. (3) becomes
and total effort is:
Once again, equilibrium effort goes to zero as c becomes large, and for all lobbyists i with \(\hat{x}^{i} \ne x^{*}\), effort increases without bound as \(c \rightarrow 0\). More interestingly, we can analyze the effect of varying the curvature of the cost function for the special case of power utility. Then (11) becomes
and it can be seen that varying k has the effect of varying r in the inverse direction: letting \(k \downarrow 1\) is analogous to letting r go to infinity, and letting \(k \rightarrow \infty \) is analogous to letting r go to zero. Thus, Theorems 4 and 3 show, respectively, that the equilibrium outcome goes to the Rawlsian outcome and the mean of ideal points in the two cases.
Fourth, we could consider a model in which each lobbyist chooses the effort for each dimension separately, i.e., \(\alpha ^{i}_{m} \ge 0\) for each \(i = 1, \ldots , n\) and \(m = 1, \ldots , d\), with the cost parameter for each dimension being \(c_{m} > 0\) for \(m = 1, \ldots , d\). In that case, Eq. (3) is replaced by
for \(m=1,\ldots , d\), and the total effort on dimension m is characterized by
Again, the equilibrium outcome on dimension m is unaffected by the cost parameter, and if the lobbyists’ ideal points on dimension m are not identical, i.e., \(\hat{x}^{i}_{m} \ne \hat{x}^{j}_{m}\) for distinct i and j, then total effort level in dimension m increases without bound as \(c_{m}\) becomes small.
7 Conclusion
This paper provides a new perspective on lobbying, in which lobbyists exert costly effort to influence policies in a multidimensional tug of war, and the resulting policy outcome reflects a balancing of the efforts of all lobbyists. We prove that the lobbying game admits a unique equilibrium, and we illustrate the tractability of the model in the analysis of comparative statics with respect to cost and preference parameters and in numerous extensions of the baseline model. The approach is most closely related to exchange models of lobbying, which usually take the form of all-pay auctions or contests, with the outcome reflecting only the preferences of the winning lobbyist, rather than a compromise of interests, as in our model. Beyond the theoretical lobbying literature, the paper also contributes to the theory of contests by allowing outcomes in an arbitrary policy space with Euclidean preferences—rather than the space of lotteries over winners—and by assuming these outcomes are a continuous function of effort levels. The model is conceptual, rather than empirical: it is meant to generate insights, rather than testable predictions. Nevertheless, the results of our paper indicate the viability of our approach to lobbying—and to other applications featuring competing interests over a continuous outcomes variable—and suggest promise for the development of extensions that can accommodate empirical analysis.
Notes
Intuitively, if output is highly homogeneous, as would be the case in agricultural markets, then foreign products priced to slightly undercut the domestic market will lead to a sharp decrease in profits of domestic firms. In the opposite case where outputs are very distinct, e.g., if consumer brand loyalty is strong, then failure to obtain desired import restrictions would entail a smaller decrease in profits.
Chung and Duggan (2018) extend the concept of geometric median to non-Euclidean utilities, and they motivate their concept of directional equilibrium as a tug of war; in contrast to the current paper, it is implicitly assumed that all voters pull with equal force. See the literature review of that paper for a history of the geometric median idea.
References
Banks J (2000) Buying supermajorities in finite legislatures. Am Political Sci Rev 94:677–681
Banks J, Duggan J (2000) A bargaining model of collective choice. Am Political Sci Rev 94:73–88
Banks J, Duggan J (2006) A general bargaining model of legislative policy-making. Q J Political Sci 1:49–85
Baron D, Ferejohn J (1989) Bargaining in legislatures. Am Political Sci Rev 83:1181–1206
Baye M, Kovenock D, De Vries C (1993) Rigging the lobbying process: an application of the all-pay auction. Am Econ Rev 83:289–294
Baye M, Kovenock D, De Vries C (1996) The all-pay auction with complete information. Econ Theory 8:291–305
Bernheim D, Whinston M (1986a) Menu auctions, resource allocation, and economic influence. Q J Political Sci 101:1–31
Bernheim D, Whinston M (1986b) Common agency. Econometrica 54:923–942
Che Y-K, Gale I (1998) Caps on political lobbying. Am Econ Rev 88:643–651
Chung H, Duggan J (2018) Directional equilibria. J Theor Politics 30:272–305
Corchón L (2007) The theory of contests: a survey. Rev Econ Des 11:69–100
Dekel E, Jackson M, Wolinsky A (2008) Vote buying: legislatures and lobbying. Q J Polit Sci 4:103–128
Epstein G, Nitzan S (2004) Strategic restraint in contests. Eur Econ Rev 48:201–210
Esteban J, Ray D (1999) Conflict and distribution. J Econ Theory 87:379–415
Groseclose T, Snyder J (1996) Buying supermajorities. Am Political Sci Rev 90:303–315
Grossman G, Helpman E (1994) Protection for sale. Am Econ Rev 84:833–850
Hillman A, Riley J (1989) Politically contestable rents and transfers. Econ Politics 1:17–39
Konrad K (2000) Spatial contests. Int J Ind Organ 18:965–974
Konrad K, Kovenock D (2005) Equilibrium and efficiency in the tug-of-war. CESifo Working Paper No. 1562
Laussel D, Le Breton M (2001) Conflict and cooperation: the structure of equilibrium payoffs in common agency. J Econ Theory 100:93–128
Le Breton M, Salanié F (2003) Lobbying under political uncertainty. J Public Econ 87:2589–2610
Linster B (1993) Stackelberg rent-seeking. Public Choice 77:307–321
Martimort D, Semenov A (2008) Ideological uncertainty and lobbying competition. J Public Econ 92:456–481
Mitra D (1999) Endogenous lobby formation and endogenous protection: a long-run model of trade policy determination. Am Econ Rev 89:1116–1134
Münster J (2006) Lobbying contests with endogenous policy proposals. Econ Politics 18:389–397
Plott C (1967) A notion of equilibrium and its possibility under majority rule. Am Econ Rev 57:787–806
Reny P (1999) On the existence of pure and mixed strategy nash equilibria in discontinuous games. Econometrica 67:1029–1056
Skaperdas S (1996) Contest success functions. Econ Theory 7:283–290
Tullock G (1980) Efficient rent seeking. In: Buchanen J, Tollison R, Tullock G (eds) Toward a theory of the rent-seeking society. Texas A & M University Press, College Station, pp 97–112
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
We thank Dan Kovenock for valuable comments on our paper.
A Proofs of propositions
A Proofs of propositions
Proof of Proposition 1:
We verify (A2) and (A3). For the former, it suffices to show that the second derivative of \(u(\Vert x^{*}-\hat{x}^{i}\Vert )-c\alpha _{i}^{2}\) with respect to \(\alpha _{i}\) is negative. For any lobbyist i, the first derivative with respect to \(\alpha _{i}\) is the following:
The second derivative simplifies to:
as required. To verify (A3), write
as required. \(\square \)
Proof of Proposition 2:
Suppose toward a contradiction that there exist distinct policies \(x'\) and \(x''\) such that \( \min _{i} f_{i}(x') = \min _{i} f_{i}(x'') = \max _{x} \min _{i} f_{i}(x)\), and let \(\underline{u}\) denote this value. Set \(x''' = \frac{1}{2}x' + \frac{1}{2}x''\), and let k solve \(\min _{i} f(x''')\), so that \(f_{k}\) is among the functions taking the lowest value at \(x'''\). By construction, we have
Then strict quasi-concavity implies \(f_{k}(x''') > \underline{u}\), but this implies that \(x'\) and \(x''\) do not solve \(\max _{x}\min _{i}f_{i}(x)\), a contradiction. We conclude that the latter problem has a unique solution, as required. \(\square \)
Proof of Proposition 3:
First, assume \(x=x^{R}\), and suppose toward a contradiction that x is not a convex combination of ideal points of lobbyists belonging to N(x). Then x is not Pareto optimal for the lobbyists in this set, and there exists \(x'\) such that for all \(i \in N(x)\), we have \(u(\Vert x'-\hat{x}^{i}\Vert ) > u(\Vert x-\hat{x}^{i}\Vert )\). For each \(\epsilon \in (0,1)\), define \(x^{\epsilon }=(1-\epsilon )x + \epsilon x'\), and note that strict quasi-concavity implies that for all such \(\epsilon \) and all \(i \in N(x)\), we have \(u(\Vert x^{\epsilon }-\hat{x}^{i}\Vert ) > u(\Vert x-\hat{x}^{i}\Vert )\). Furthermore, by continuity of u, we can choose \(\epsilon >0\) sufficiently small that for all \(i \in N \setminus N(x)\), we have \(u(\Vert x^{\epsilon }-\hat{x}^{i}\Vert ) > u(\Vert x-\hat{x}^{i}\Vert )\). But then we have
a contradiction. We conclude that x is a convex combination of ideal points of lobbyists in N(x).
For the converse, assume that x is a convex combination of ideal points of lobbyists in N(x), and suppose toward a contradiction that \(x \ne x^{R}\). Then we have
Since \(x^{R} \ne x\) and \(x \in \text{ conv }\{\hat{x}^{i} \mid i \in N(x)\}\), it follows that if \(\Vert \hat{x}^{i}-x^{R}\Vert < \Vert \hat{x}^{i}-x\Vert \) for some \(i \in N(x)\), then there is some \(k \in N(x)\) such that \(\Vert \hat{x}^{k}-x\Vert < \Vert \hat{x}^{k}-x^{R}\Vert \). But this would imply
a contradiction. Thus, we must have \(u(\Vert x-\hat{x}^{i}\Vert ) = u(\Vert x^{R}-\hat{x}^{i}\Vert )\) for all \(i \in N(x)\). For each \(\epsilon \in (0,1)\), define \(x^{\epsilon }=(1-\epsilon )x+\epsilon x^{R}\), and note that strict quasi-concavity implies that for all such \(\epsilon \) and all \(i \in N(x)\), we have \(u(\Vert x^{\epsilon }-\hat{x}^{i}\Vert ) > u(\Vert x^{R}-\hat{x}^{i}\Vert )\). Furthermore, by continuity of u, we can choose \(\epsilon >0\) sufficiently small that for all \(i \in N \setminus N(x)\), we have \(u(\Vert x^{\epsilon }-\hat{x}^{i}\Vert ) > u(\Vert x^{R}-\hat{x}^{i}\Vert )\), which leads to a contradiction, as above. We conclude that \(x=x^{R}\), as required. \(\square \)
Proof of Proposition 4:
Suppose otherwise, toward a contradiction. By Theorem 1, there is a unique equilibrium outcome \(x^{*}\), and this is characterized as the unique solution to (3). By exact radial symmetry, there is a bijective mapping \(\phi :N \rightarrow N\) such that for each lobbyist i, we have \(\hat{x}^{i} - x = x- \hat{x}^{\phi (i)}\), i.e., the ideal point of lobbyist i coincides with the reflection of the ideal point of lobbyist \(\phi (i)\) through x. Since \(\phi \) is bijective, we can rewrite (3), by a change of variables and multiplying by negative one, as
Using \(\hat{x}^{\phi (i)}=2x-\hat{x}^{i}\), we write this as
We conclude that the policy \(2x-x^{*} \ne x^{*}\) satisfies (3), as does \(x^{*}\), contradicting the fact that the system has a unique solution. \(\square \)
Rights and permissions
About this article

Cite this article
Duggan, J., Gao, J. Lobbying as a multidimensional tug of war. Soc Choice Welf 54, 141–166 (2020). https://doi.org/10.1007/s00355-019-01215-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00355-019-01215-4