
Abstract
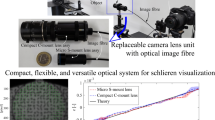
An image fibre Background Oriented Schlieren (Fibre BOS) technique has an advantage in cost-effectiveness as well as portability and flexibility for a time-resolved quantitative three-dimensional unsteady density measurement. The reason why the Fibre BOS technique has these advantages is that a transparent medium can be visualized at several projection angles, which are required for a tomographic reconstruction, using the flexible optical image fibres instead of expensive high-speed cameras, simultaneously. The basic and demonstration experiments were conducted to investigate the performances of the Fibre BOS technique in this study. The estimation accuracy of a deflection angle is increased when a background-dot size is more than twice as large as a core which is the component of the image fibre if the core size is larger than a pixel size on an image sensor. Multiple images going through the image fibres from several projection angles are simultaneously captured using a single camera, and temporal variation of an unsteady complex flow is measurable. The Fibre BOS technique has a potential to conduct the high time-resolved three-dimensional unsteady density measurement using a single high-speed camera.
Graphic abstract

Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Background Oriented Schlieren (BOS) technique consisting of extremely simple optical components is a powerful quantitative measurement tool on various flow situations such as a steady/unsteady flow and a two/three-dimensional flow. The principle of a BOS method was proposed by Dalziel et al. (2000) in an article published in 2000, and they demonstrated its performance in several two-dimensional measurements. Afterwards, the BOS technique expanded rapidly to various applications under various measurement types. Since conventional schlieren techniques are generally used for compressible flow, the BOS technique which has the same potential as conventional one is also applicable to a high-speed flow region. Meier (2002) applied the BOS technique to visualize a supersonic jet and a sound wave from a gun exit in 2002; however, the measured results are a two-dimensional projection of a three-dimensional phenomenon due to the integration of density gradients along a light beam. An article published in 2000 by Raffel et al. (2000) described an outline of possibility of three-dimensional flow measurements using multiple cameras, and they attempted to conduct a quasi-three-dimensional unsteady flow measurement due to a stereoscopy technique. To obtain a quantitative density field in the three-dimensional flows, Venkatakrishnan and Meier (2004) adopted a filtered back projection technique which is a tomographic reconstruction algorithm to a steady flow around an axisymmetric cone model in a supersonic flow. The tomographic techniques started to be widely used in the BOS measurements since 2004 for both steady and unsteady flow situations (Nicolas et al. 2017a; Ota et al. 2011; Venkatakrishnan and Suriyanarayanan 2009). Atcheson et al. (2008) conducted a low time-resolved unsteady flow measurement in 2008 to obtain temporal variation of a quantitative three-dimensional unsteady density field using multiple cameras that capture the images at several projection angles, simultaneously. More recently, Nicolas et al. (2017b) conducted a state-of-the-art measurement in which a high-illumination pulse laser with pulse duration of 100 ns and 12 cameras with maximum framerate of 15 fps were used. Although these measurements enable a deep understanding of complex flow fields because of temporal variation of the density field, there are limitations in time resolution due to mainly the low framerate of the camera.
It is possible to achieve a higher time-resolved three-dimensional unsteady flow measurement once several high-speed cameras are used instead of the low-speed cameras; however, it would not be easy to conduct the high time-resolved unsteady flow measurements because of a cost issue. In the BOS systems, scattered light from a background pattern passes through a transparent medium, and a camera captures scattered light as a projection image. A tomographic BOS requires the projection images captured at different locations as well as an iterative tomographic reconstruction algorithm. For a time-resolved three-dimensional unsteady flow measurement, temporal variation of the instantaneous images must be captured at several projection angles, simultaneously. The insufficient number of the projection images for the tomographic reconstruction causes an inferior reconstructed result, thus several cameras capturing several instantaneous projection images are required. Atcheson et al. (2008) showed that 16 cameras mounted in a half circle configuration around a hot air flow provides the suitable three-dimensional reconstruction of a density field. Additionally, Nicolas et al. (2016) adapted a regularization technique to the reconstruction process for the reduction in the projection images and mainly demonstrated that a sufficient three-dimensional density field is obtained using 12 cameras. What is challenging here is that several expensive high-speed cameras are necessary for a high time-resolved three-dimensional unsteady flow measurement.
The use of an optical image fibre instead of several expensive high-speed cameras provides a feasible time-resolved tomographic BOS system, which is satisfied with low cost as well as a good reconstruction image. A captured image at an arbitrary projection angle can go through the optical image fibre, and several image fibres at a reflection side are positioned in front of a single camera. This means that it would be possible that several instantaneous images are captured using the single camera, simultaneously. We define this kind of the optical system as an image fibre Background Oriented Schlieren (Fibre BOS). Hecong et al. (2020) adapted the several endoscopes consisting of the image fibre to a BOS system for a feasible time-resolved tomographic density measurement and demonstrated its proof of concept. However, there is a lack of explanation about an estimation method for an optical spatial resolution which is important for the general BOS measurements. Additionally, the effects of the endoscope, which is an optical component added to a conventional BOS system, on a measurement accuracy were not fully investigated. These kinds of knowledge would be important for the use and the productization of the Fibre BOS system. In this study, we experimentally investigate the effect of the image fibre on a measurement accuracy in the Fibre BOS technique as well as the performances including the spatial resolution.
2 Methods
2.1 Telecentric Fibre BOS
Several optical image fibres are employed in the Fibre BOS technique for a sequential three-dimensional unsteady flow visualization. The principle of image transmission through a basic step-index optical fibre is explained in this section first. A typical image fibre is composed of the multi-cores, a melted clad, and a jacket (Fig. 1). When an incident light beam at an angle of α enters to the fibre front, part of the incident light beam is reflected back from the fibre front at the same incident angle of α, and the other lights are refracted at an angle of β. The refracted light remains going through the core due to total internal reflection on a core-clad interface at the suitable conditions. For image transportation due to an optical image fibre, the image fibre consists of a bundle of cores several micrometres in diameter. Based on Snell’s law, a limiting angle for total internal reflection is defined by \(\sin \varphi_{{{\text{max}}}} = n_{{{\text{clad}}}} { }/n_{{{\text{core}}}} { }\). This limiting angle ψmax can be related to a maximum possible angle of incidence αmax expressed as the numerical aperture NA of the fibre (Mitschke 2009);

The component of the image fibre, and ray tracing inside the core. The left- and right-hand sides of figure show the front view of the fibre end and side view of the fibre inside, respectively
The maximum possible angle of incidence depends on the refractive indexes of surrounding medium n0, core ncore, and clad nclad. In a typical optical glass fibre, the refractive indexes of the core and the clad are very close, which results in very small maximum possible angle of incidence. Therefore, incident parallel light beams on the fibre front would be reasonable to achieve total internal reflection on the core-clad interface. When considering the application of the image fibre to the BOS techniques, a suitable imaging lens/camera lens that focuses an object image on the incident side of the fibre is necessary so that the image can be transmitted to another fibre end. Otherwise, due to large angle of incidence, brightness of the transmitted image is decreased, and it would be difficult to obtain sufficient image contrast as well.
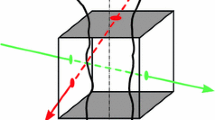
The present Fibre BOS consists of three components: a double-side telecentric optical system, the optical image fibre, and a camera lens (Fig. 2). To enable small maximum possible angle of incidence, the double-side telecentric optical system that the parallel light beams are emitted to an image side was applied to the present Fibre BOS technique. The telecentric optical system was applied to a BOS technique by Elsinga et al. (2004) for the first time. Recently, Ota et al. (2015) have reported about more aspects of the principle of the spatial image resolution in the telecentric BOS technique. The collected parallel light beams passing through a density gradient field on the refractive plane are refracted at a deflection angle ε, which results in a virtual image displacement Δhb on the background plane. The virtual image displacement is related to a transmitted image displacement Δs on the fibre end at the incident side with the magnification factor of the double-side telecentric optical system, Mtele (= f2/f1), namely f2/f1 = Δs/Δhb. f1 and f2 are the focal lengths of the Lens 1 and Lens 2, respectively (Fig. 2). Assuming small deflection angle (\(\varepsilon \approx \tan \varepsilon\)), the virtual image displacement is expressed as; Δhb = lb ε. Thus, the transmitted image displacement Δs due to the deflection angle in the telecentric optical system is rewritten as;
where lb is the distance between the background and refractive planes. The deflection angle ε varies depending on the spatial gradient of a refractive index n integrated along a beam path, and the deflection angle is defined by (Venkatakrishnan and Meier 2004);
where H (X, Y) denotes the direction on the projection plane. The subscript 0 denotes the quiescent surrounding gas. The transmitted image displacement Δs at the incident side going through the optical image fibre shows the same displacement at the reflection side because of image transmission through the image fibre. An image sensor on a camera records this transmitted image displacement Δs with the magnification factor of the camera lens, Mc (= li/lFout). In other words, an image displacement Δhi on the image plane is expressed as; Δhi = Mc Δs. The camera lens consisting of several lens components is assumed to a single lens for simplification. Since the camera lens with a focal length of f3 is focused on the fibre end at the reflection side, the following formula applies;
where li and lFout are the distances from the camera lens (lens 3) to the image sensor and to the fibre end at the reflection side, respectively. Based on Eq. (4), the magnification factor of the camera lens is Mc = f3/ (lFout − f3). Therefore, from Eq. (2) and Eq. (3), the image displacement Δhi is rewritten as;

Optical path in the Fibre BOS based on the double-side telecentric optical system
For a sequential three-dimensional unsteady flow visualization in the present Fibre BOS technique, a small image fibre diameter dfibre, which is much smaller than the full image sensor size, is used so that the images transmitted from several image fibres can be captured by the image sensor, simultaneously. Consequently, a small object image size due to low Mtele (= f2/f1) provides the small image displacement Δhi. To increase the displacement magnitude, the author suggests using high magnification factor of the camera lens and increasing the distance between the background and refractive planes, lb; however, the upper limit would be restricted by the increasing blur of the recorded object if increasing the distance lb.
Since the Fibre BOS technique is composed of the optical image fibre and several lenses, the spatial image resolution may become worse than conventional BOS techniques; however, it depends on the quality of the optical components as well as optical arrangement. A resolving power of the image fibre and/or the lenses would influence to the spatial image resolution in the Fibre BOS setup. Ota et al. (2015) and Gojani et al. (2013) reported the spatial image resolutions in the telecentric and normal BOS techniques, respectively. Based on their explanations, we estimate the spatial image resolution in the present Fibre BOS system (Fig. 3). The spatial image resolution would be related to the cone of light emitted from one point on the background plane as well as the circle of confusion (CoC) of the optical systems. As a dot line shown in Fig. 3, the cone of light diverges from the background plane and is collected by an aperture diameter of dtele. Based on similarity between the aperture diameter and the light diameter on the refractive plane, the spatial image resolution δr on the refractive plane is expressed as;

Geometry for the image blur estimation on the refractive plane in the telecentric Fibre BOS
Ftele (= f1/dtele) is the F-number of the telecentric optical system. Additionally, the CoC of the optical system influences the image resolution on the refractive plane. We define a blurred image magnitude ξ on the fibre end at the incident side, and it is caused by either the resolving power of the image fibre R, the CoC of the telecentric optical system δtele, or the CoC of the camera lens δi. Only worst one in these resolving powers would influence the spatial image resolution because the spatial image resolution depends on the poorest resolving power in the system. Thus, the spatial image resolution is estimated based on the factor limiting the resolving power the most. Depending on the blurred image magnitude ξ, the shortest distance of a background pattern on the background plane can be resolved, δb = ξ/Mtele. In the double-side telecentric optical system with parallel light beams passing through the object side, the spatial image resolution on the refractive plane is the same as that on the background plane, namely δb = δr; therefore, the spatial image resolution on the refractive plane is defined as;
Although the Fibre BOS consisting of several optical components may cause a reduction in the spatial image resolution, Eq. (7) will become the same as an estimated equation for the spatial image resolution in the telecentric BOS technique (Ota et al 2015) if both resolving powers R and δi, are better than δtele. The spatial resolution due to an individual optical system is generally determined by diffraction-limit of the optical components, whereas the spatial resolution due to the image fibre is related to the core diameter. Additionally, an individual pixel size on the image sensor is related to the spatial resolution of the whole optical system. If the individual pixel size on the image sensor is smaller than these optical spatial resolutions, the resolution in the whole system is determined by the spatial resolution of either optical components or image fibre.
2.2 Image processing
A local image displacement at each projection angle is estimated by a cross-correlation method. Both background images with and without the density gradient are captured at several projection angles θ in the Fibre BOS setup, and the local image displacement, namely pixel displacement, is detected by the similar pixel intensity shift between these captured images at each projection angle. In most of the BOS techniques, the pixel displacement is calculated using the same algorithm as that for the estimation of a particle movement in the particle image velocimetry techniques. In this study, the pixel displacement was estimated by a direct cross-correlation algorithm with a hierarchical recursive operation (Hart 2000a; Daichin and Lee 2003) driven by an inhouse MATLAB code. The Correlation Based Correction (CBC) technique (Hart 2000b) was employed. The spurious vector removal by Laplacian based equation, vector interpolation by a cubic polynomial, and sub-pixel interpolation with Gaussian peak fitting (Raffel et al. 2018) were applied to accurately estimate the pixel displacement vectors. An initial search window is set at 33 × 33 pixel, whereas an initial interrogation window is set at 17 × 17 pixel without overlap between each adjacent interrogation window. The hierarchical recursive operation that the search and interrogation windows are divided into quarters to achieve a high vector resolution without spurious vectors is processed. Thus, a final effective vector resolution is 9 pixel, namely the distance between the centre of the final adjacent interrogation windows. Then, the vector resolution is further increased by interpolating additional grid points. The estimated displacement magnitudes in the X- and Y-directions are converted to the deflection angles using Eq. (5). Then, the calculated deflection angles are used for a tomographic reconstruction.
The Algebraic Reconstruction Technique (ART), which has been successfully applied to the BOS images in the previous studies (Hirose, 2019; Ota et al. 2011), is employed for the estimation of the three-components of the refractive index gradients. The calculated deflection angle in the X-direction on each projection angle is divided into that in the x- and y-components on the reconstruction plane by the trigonometric relations as shown in Fig. 4. On the other hand, the deflection angle in the Y-direction on the projection plane is equal to that in the z-component on the reconstruction plane. Based on Eq. (3), each deflection angle in the x-, y-, and z-components are converted to the integral of the refractive index gradients along a projection path. These integral of the refractive index gradients at each projection angle are reconstructed by the ART (Kak and Slaney 1988) expressed as;
where f, P, and R denote a reconstructed field, a measured projection field and a pseudo projection field, respectively. α is a relaxation factor to avoid the divergence during the calculation for the reconstruction. k is the number of iterations. C is a weight factor which shows the relationship between the pixel magnitudes on the projection and reconstruction planes. As the results of calculation by the ART, the refractive index gradients: ∂n/∂x, ∂n/∂y, and ∂n/∂z, are obtained on the reconstruction field in each component. In this study, the recorded image size was reduced to half for the calculation of the three-dimensional reconstruction because of time-consuming work as well as a CPU memory issue in a local computer used in this study.

The coordinate systems for three-dimensional reconstruction by the ART
A local refractive index n is computed by a three-dimensional Poisson equation, Eq. (9):
where S, which is the source term, is given by the reconstructed refractive index gradients. The Poisson equation is solved using the successive over-relaxation method. The relationship between refractive index n and the density of medium ρ is given by the Gladstone–Dale law:
The Gladstone-Dale constant for air G = 2.26 × 10–4 m3/kg was applied in this study.
3 Experimental setup
The basic and demonstration experiments were conducted in the Fibre BOS setup using stationary and non-stationary mediums, namely a phase object and a candle flame. To evaluate the accuracy of the deflection angle and/or the pixel displacement in the Fibre BOS technique, we used the phase object: a lens (CVI Laser Optics, model: PLCX-25.4-5151.0-C, outer radius: 12.7 mm, surface accuracy: λ/10) with a focal length of fcal = 10 m. This lens provides a theoretical deflection angle εcal:
where r denotes an arbitrary lens radius where at the εcal can be obtained on the lens surface (Ukai et al. 2018). To demonstrate a sequential three-dimensional unsteady flow visualization using the Fibre BOS technique, an unsteady candle flame generated from a wick of approximately 0.5 mm in diameter was visualised. The room temperature and pressure were monitored during the experiments.
Figure 5 shows a single-optical arrangement of the Fibre BOS for the investigation of the foundational characteristics in the Fibre BOS technique. A continuous 20 W LED backlight diffused by a tracing paper illuminates a semi-random dot background pattern consisting of random dots around a regular grid dot pattern (Nicolas et al. 2016). The semi-random dot pattern, which provides sufficient image perturbations without partial blank area, prevents matching ambiguities during a correlation search. In this paper, “correlation search” means calculating a best correlation value on each search window. The dot pattern was printed on the OHP film using a monochrome laser printer. The background distance lb was adjusted in a range of 320, 520 and 620 mm, and la was 130 mm. The light beams passing through a transparent medium are received by the Lens 1 with a focal length of f1 = 300 mm. The beams go through the aperture of dtele ≈ 0.6 mm in diameter to collect the parallel light beams. The Lens 2 with a short focal length of f2 = 12 mm leads a small size image to a plastic optical image fibre (Asahi KASEI, model: MCL-2000-24, core number: 13000, NA = 0.5, dfibre = 2.0 mm) which is a step-index fibre. An image fibre of 300 mm in length was used. To satisfy the maximum angle of incident αmax on a small fibre diameter dfibre, the telecentric optical system with small magnitude factor of Mtele = 0.04 was employed. A digital camera (Canon, model: EOS 60D) with a Macro camera lens (Canon, model: MP-E6528M, f3 = 65 mm, F-number: Fc = 2.8) captures the image on the image fibre end at the reflection side. Since the solid phase object does not move unlike fluids, the camera shutter speed was set at 20 ms to enhance an image brightness without noise due to long exposure time.

The single-optical arrangement of the Fibre BOS setup
The Fibre BOS technique has an advantage in cost-effectiveness as well as portability and flexibility for the sequential three-dimensional unsteady flow visualization with high-time resolution. This is because the optical image fibre can visualize a transparent medium at several projection angles, which are required for the reconstruction of the three-dimensional density field, simultaneously. Additionally, compact optical lenses compared to a typical high-speed camera, which is relatively large and heavy, can be used in the Fibre BOS setup. As shown in Fig. 6, 6 double-side telecentric optical systems with the image fibre are mounted in a half circle configuration around the transparent medium: the candle flame. Each fibre end from several projection positions are connected to a fibre collector positioned in front of the camera lens so that the single camera can capture the images at several projection angles at the same time. Except for the optical distances and the fibre length, the optical components including the camera are the same as that in the single-optical arrangement. The image fibre of 2 m in length was used in the multi-optical arrangement. Additionally, the distance from the candle flame to the background and to the Lens 1 were lb = 420 mm and la = 230 mm, respectively. The camera was set to continuous recording mode at 5.3 fps, while the shutter speed was set at 1.25 ms. Although the shutter speed as well as the frame rate are set at still low-speed range, a stationary instant image can be captured in this study because of the slow-moving candle flame.

The multi-optical arrangement of the Fibre BOS setup for the unsteady three-dimensional flow visualization
Although the spatial image resolution decreases slightly in the Fibre BOS setup than that of a conventional telecentric BOS setup, the image going through the image fibre is identifiable with the moderate spatial image resolution in the present optical setup. Figure 7 shows the phase object images captured using the conventional telecentric BOS and Fibre BOS techniques. In the conventional mode, we used the same optical setup without the image fibre. Additionally, the same background-dot size which is not suitable for the present conventional telecentric BOS setup was used for the comparison of the image in the Fibre BOS, we discuss the effects of the dot size later. The double-side telecentric optical system in the Fibre BOS captured the image focused on both background-dot pattern and phase object even though the lights emitted from them go through the image fibre; however, their images became slightly blurred because of the image fibre. To estimate the spatial image resolution on the refractive plane using Eq. (7), we firstly estimate the blurred image magnitude ξ caused by either the resolving power of the image fibre R, the CoC of the telecentric optical system δtele, or the CoC of the camera lens δi. The magnification factor of the camera lens and the background length were Mc = 2.4 and lb = 420 mm, respectively. The core diameter of the image fibre was dcore = 14.1 ± 0.6 μm measured using a digital microscope (Keyence, model: VHX-6000, zoom lens: VH-Z100R, lens magnification factor: 100–1000). According to a technical paper (Alter et al. 2007), the resolving power of the image fibre is expressed as R = 2dcore, thus R ≈ 28 μm is obtained in the present image fibre. The blurred image on the fibre end due to the CoC of the camera lens is calculated as \(\delta_{{\text{s}}} = \delta_{{\text{i}}} /M_{{\text{c}}} = 1.22\lambda F_{{\text{c}}} /M_{{\text{c}}}\) ≈ 0.74 μm, whereas the CoC of the telecentric optical system is \(\delta_{{{\text{tele}}}} = 1.22\lambda f_{2} /d_{{{\text{tele}}}}\) ≈ 13 μm. The wavelength of light λ = 520 nm is used for the calculation. Because of the worst resolving power of 28 μm in the present optical system, the spatial image resolution on the refractive plane is calculated as 1.5 and 1.2 mm in the Fibre BOS and present conventional telecentric BOS setups, respectively. Although the spatial image resolution in the Fibre BOS setup is 20% lower than that in present conventional one, the phase object is clearly visible. Additionally, the background-dot pattern which is important to estimate the deflection angle in general BOS techniques is identified in the Fibre BOS technique; however, the shadows due to the clad are identified too.

Comparison between the image of the phase object captured without the image fibre (left panel) and the image going through the image fibre (right panel). The dot size of 1.15 ± 0.12 mm in diameter corresponding to approximately 9.2 pixel/dot. lb = 520 mm, Mc = 2.4
4 Results and discussion
4.1 Characteristics of the Fibre BOS
The identified shadows cause a poor estimated deflection angle. Ideally, the image without the shadows due to the clad should be captured since the shadows is irrelevant to density gradient on the refractive plane, thus it is important to select suitable optical components as well as its arrangement to achieve the image without the shadows. The total number of the picture cells on the image sensor, the magnification factor of the camera lens, the CoC of the camera lens, and the thickness of the clad are all related to capturing the shadows. The suitable optical components would be not necessarily selected because of manufacturing limits of the image fibre although an image fibre with very thin clad material is not required to a camera lens providing poor resolving power. Hence, as shown in the present images (Fig. 7), the shadows due to the clad are likely to appear in the Fibre BOS techniques, and the shadows would influence the estimation accuracy of the pixel displacement, namely the deflection angle. To investigate the effects of the shadows on the estimation accuracy, we adjusted the camera focal position so that the shadows of the clad can be invisible. In other words, the image is focused on the outside of the depth-of-field (Fig. 8b). On the defocused image (Fig. 8b), the shadows due to the clad are hardly identified, whereas they are identified on the image shown in Fig. 8a because of the image focused on the fibre end. Figure 9 shows the experimental and theoretical deflection angles in the X-direction. The theoretical deflection angle was calculated using Eq. (11). The error bars denote a standard deviation calculated in a range of Y = ± 1 mm from a horizontal centre line of the lens. The slightly blurred image: the defocused image provides the moderate deflection angle (see a red line in Fig. 9), whereas the deflection angle calculated from the focused image on the fibre end: a clear image is almost zero in a range of r = ± 4 mm (see a blue line in Fig. 9). The reason why the clear image shows the poor estimated deflection angle is that the shadows providing a regular grid pixel intensity distribution would make it more difficult to identify a pixel intensity distribution due to the background-dot pattern. The estimated deflection angle does not change in a range of r = ± 4 mm because of a small pixel displacement, and a large pixel displacement would cause the dramatical change of the deflection angle at approximately r = − 5 and 5 mm. It can be deduced that the identified shadows influence a correlation value for the estimation of the pixel displacement during the correlation search, and a simple focal adjustment by the camera lens improves the estimation performances for the pixel displacement.

The captured images of the phase object at different focal positions. The core size of 14.1 ± 0.6 μm in diameter. lb = 520 mm, Mc = 2.4

The estimated deflection angles obtained from the images at different focal positions. lb = 520 mm, Mc = 2.4
A slightly blurred image due to the simple focal adjustment provides good correlation signal strength. To fully understand the effects of the regular grid pixel intensity distribution due to the shadows, we calculated the correlation values on these images (Fig. 8) during the correlation search. The search and interrogation windows were set at 33 × 33 pixel and 17 × 17 pixel, respectively. The correlation value was obtained on the lens surface (phase object) 21 mm in diameter. During the correlation search, the hierarchical recursive operation as well as the spurious vector removal, vector interpolation, and CBC techniques were deactivated to investigate the effects of the blurred image without any other effects of the post-processing techniques. Please note that these deactivated post-processing techniques cannot improve the estimation performances because the poor estimated deflection angle shown in Fig. 9 was obtained using the full post-processing techniques. Table 1 shows the ensemble average of the highest correlation peak in each search window and a correlation signal strength (\(= 1 - 1/\widehat{{{\text{SNR}}}}\)), where the circumflex denotes the ensemble average. The slightly blurred image: the defocused image on the fibre end, has good correlation signal-to-noise ratio (SNR) which is defined as a highest correlation peak divided by second highest one. The high correlation signal strength and large highest correlation peak avoid estimating a spurious pixel displacement. The sharpness of the image where the highest correlation peak appears was calculated using Eq. (12) based on Laplacian filter.
The ensemble average of the sharpness of the pixel intensity on the focused image on the fibre end (\(\hat{S}\) = 23.7 ± 11.3) was approximately five times as much as that on the defocused image (\(\hat{S}\) = 4.3 ± 2.8). The low image sharpness denotes the smoothing of the regular grid pixel intensity due to the shadows of the clad. A possible scenario of providing the good correlation signal strength is that the smoothed regular grid pixel intensity due to the shadow hardly disturb a distinctive pixel intensity distribution due to the background-dot pattern during the correlation search, and consequently the pixel shift of the distinctive pixel intensity would be easily estimated. This means that the slightly blurred image has more robustness of image intensity noise.
The relationship between the core and background-dot sizes is an important parameter for the estimation accuracy of the pixel displacement. Figure 10 shows the ensemble average of the RMSE (Root mean square error) of the deflection angle in the X-direction, and they were obtained in a range of Y = ± 1 mm from the horizontal centre line of the lens (phase object). The experiments were conducted five times at each condition, and the vertical error bars shown in Fig. 10 denote the standard deviation of the ensemble average of the RMSE obtained from each experiment. A size ratio shown on the horizontal axis in Fig. 10 denotes the occupancy of the background dot by either the pixel or the core. In the conventional telecentric BOS case (Fig. 10a), the estimation accuracy shows better at the size ratio in the range of 3 and 5 pixel/dot, which results in the same as a general principle (Raffel 2015). On the other hand, the same size ratio of 3–5 pixel/dot corresponding to the size ratio less than 2 core/dot causes a poor estimation accuracy in the Fibre BOS case (Fig. 10b). Each core on the image fibre plays a role as a picture cell, namely each pixel on the image sensor, if the core size is larger than the picture cell size; therefore, the movement of a small background-dot size including the similar size of the core is hardly identified because it causes like the peak-locking phenomena (Westerweel 2000). As shown in Fig. 10b, the estimation accuracy is improved when the background-dot size is more than twice as large as the core size in this experiment.

The RMSE of the estimated deflection angle with the relationship between core/pixel size and background-dot size. lb = 520 mm, Mc = 2.4
The estimation method expressed as Eq. (5) in the present Fibre BOS technique leads to a good deflection angle corresponding to the pixel displacement. Based on the present experimental results, we adjusted the camera focal position as well as the suitable background-dot size of approximately 2.5 core/dot so that the estimation performers can be enhanced during the correlation search. Figure 11 shows the theoretical and experimental pixel displacements in the X-direction on the phase object. The estimated pixel displacement is almost in agreement with theoretical one and varies with the different optical setups: the background distance lb and the magnification factor of the camera lens Mc. Therefore, the experimental results show that the pixel displacement depending on the optical setup can be estimated by Eq. (5). Although the ensemble averages of the RMSE of the pixel displacement at lb = 620 mm and Mc = 3.9 seems to cause relatively large error compared to the other optical setups, the RMSE of its deflection angle shows better in this optical setup (Table 2). This is because as expressed as Eq. (5), large lb and high Mc result in a higher pixel shift for a given deflection angle, leading to a smaller estimation error.

The estimated pixel displacement in the X-direction at different background distance lb and the magnification factor of the camera lens Mc. The background-dot size of approximately 2.5 core/dot
4.2 Demonstration of sequential three-dimensional density measurement
The simple focus adjustment technique as well as the suitable background-dot size provides a good pixel displacement field around the candle flame which is a real density field. The background-dot size of approximately 2.5 core/dot was used in the demonstration experiment, and the magnification factor of the camera lens was set at Mc = 2.3. Thus, the dot size of approximately 7 pixel/dot was captured on the camera sensor. Figure 12 shows a sample pixel displacement field captured around a stationary candle flame with an effective vector spacing of 9 pixel. Please note that we varied the vector magnitude so that the vectors can be easily seen. The shown image was captured at the elapsed time of Δt = 0 ms. The largest vector magnitude occurred in the vicinity of the candle wick, whereas the vector magnitude is almost zero at stationary surrounding air. The width of the flame at Y = 50 pixel shown in Fig. 12 is approximately 100 pixel corresponding to the number of 32 fibre cores. A scale-factor of 0.12 mm/pixel in this optical setup results in the resolution of 2.7 core/mm.

The sample image with pixel sift vectors around the stationary candle flame. The tip of the candle wick is positioned at approximately (X, Y) = (100, 25) on the image
The Fibre BOS technique gives us the detailed information and enables a deep understanding of complex flow mechanism in temporal variation of an unsteady flow. Figure 13 shows temporal variation of a three-dimensional density field above the moving candle flame. Please note that the strange density cores around main structure is caused by less projection image during tomographic reconstruction process. At the elapsed time of Δt = 0 ms (Fig. 13a), a hot air due to the candle flame remains still, and the density core of ρ/ρ0 = 0.6 reaches the top of the visualization region. Due to a weak wind induced by a small fan positioned diagonally below the candle, the hot air starts diffusing at the elapsed time of Δt = 188.7 ms (Fig. 13b). After that the density core of ρ/ρ0 = 0.6 remains at the middle of the visualization region because a temperature at the upper part of the hot air would be decreased by the weak wind (Fig. 13c). At the elapsed time of Δt = 566.1 ms (Fig. 13d), the distorted hot air is moved towards different direction, and the density core of ρ/ρ0 = 0.6 grows towards the top of the visualization region again. Since we did not control the flow conditions such as flow velocity, its direction, and its profile, the discussion of the flow mechanism is not important, but the potential of the Fibre BOS technique has been demonstrated in this measurement.

Temporal variation of the three-dimensional density field above the candle flame. The iso-surface of density ratio ρ/ρ0 = 0.4, 0.6, 0.8 and 0.95 are shown
The present optical setup has a potential to simultaneously capture the additional projection images and to be applicable to a high-speed sequential three-dimensional unsteady flow visualization. Figure 14 shows the captured raw grayscale images on the image sensor size of 1280 × 1920 pixel (height × width). The magnification factor of the camera lens is the same as that in the demonstration experiment for the three-dimensional density measurement. The images of the phase object with different attitude were captured using the single camera, simultaneously. Each image fibre provides a visualization area of approximately 50 mm in diameter with a scale-factor of 0.12 mm/pixel, namely the fibre diameter of dfibre ≈ 420 pixel. A typical high-speed camera (Phantom v2640, Photron FASTCAM Nova R2, and nac MEMRECAM HX-3, for example), which has 4 Megapixel image sensor, leads to the frame rate on the order of a few kilos frame per second. We expect advance in technology of the high-speed cameras, and a higher frame rate with 4 Megapixel image sensor will be reached in future. Based on the specification of a kind of high-speed camera as well as the visualization area of dfibre ≈ 420 pixel on the present image sensor, 12 projection images will be simultaneously captured for a moderate high-speed sequential unsteady three-dimensional flow visualization. Generally, more than 12 projection images would lead to a good three-dimensional reconstruction (Atcheson et al. 2008; Nicolas et al. 2017b); however, the concept in the Fibre BOS technique would be demonstrated in this study even though 6 projection images are used for the tomographic reconstruction.

The simultaneously captured raw grayscale images at several projection angles. The image sensor size of 1280 × 1920 pixel (height × width). The scale-factor of approximately 0.12 mm/pixel. dfibre ≈ 420 pixel on the image sensor. Mc = 2.3
5 Conclusion
Characteristics and potential of an image fibre Background Oriented Schlieren (Fibre BOS) technique were experimentally investigated in this study. The present Fibre BOS consisting of several double-side telecentric optical systems, several optical image fibres, and a single camera with a camera lens has an advantage in cost-effectiveness as well as portability and flexibility for the sequential three-dimensional unsteady flow visualization with high-time resolution. The reason why the Fibre BOS has these advantages is that a transparent medium can be visualized at several projection angles, which are required for a tomographic reconstruction, using the optical image fibres instead of the expensive high-speed cameras, simultaneously. Although the present telecentric optical system consists of several optical components, a produced telecentric lens instead of the present optical components can be used. Thus, the Fibre BOS technique has a potential of portability and flexibility for the arrangement of the optical system compared to a typical high-speed camera, which is relatively large and heavy.
The experimental results showed that an object and a background-dot pattern which is important to estimate a deflection angle in general BOS techniques were identified on a camera image sensor even though the lights emitted from them go through the image fibre. However, the shadows due to a melted clad which is a component of the image fibre were identified too. The shadows are likely to appear in the Fibre BOS techniques, and it influenced a correlation value for the estimation of a pixel displacement during a correlation search. The shadows providing a regular grid pixel intensity distribution would make it more difficult to identify a pixel intensity distribution due to the background-dot pattern. To minimize the effect of the shadows, the author suggests a simple focal adjustment by the camera lens. A slightly blurred image due to the simple focal adjustment provided good correlation signal strength during the correlation search, which results in the improvement of the estimation accuracy. A possible scenario of providing the good correlation signal strength is that a distinctive pixel intensity distribution due to the background-dot pattern is more apparent than the smoothed regular grid pixel intensity due to the shadow, and consequently the pixel shift of the distinctive pixel intensity would be easily estimated. This means that the slightly blurred image has more robustness of image intensity noise.
The experimental results also showed that it is important to adjust the background-dot size based on the core size if the core size is larger than the pixel size on the image sensor. Otherwise, the movement of a small background-dot size including the similar size of the core is hardly identified. This is because each core on the image fibre plays a role as a picture cell, namely each pixel on the image sensor. The author suggests using the background-dot size in a range from 2 to 4 cores per dot for a better estimation accuracy of the deflection angle.
Temporal variation of a three-dimensional unsteady density field above a moving candle flame was measured using the Fibre BOS technique. The multiple images going through the image fibres from several projection angles were simultaneously captured using the single camera in the present Fibre BOS setup. Based on the captured multiple images, a three-dimensional density field was reconstructed, and a complex flow structure was measurable. Consequently, the Fibre BOS technique enabled a deep understanding of the complex flow. This study has demonstrated that the Fibre BOS techniques have a potential to conduct the time-resolved three-dimensional unsteady density measurement using the single camera.
Availability of data and material
The images shown in Fig. 8 are available from the corresponding author upon reasonable request.
References
Alter P et al (2007) An introduction to fiber optic imaging, 2nd edn. SCHOTT North America
Atcheson B, Ihrke I, Heidrich W, Tevs A, Bradley D, Magnor M, Seidel HP (2008) Time-resolved 3D capture of non-stationary gas flows. ACM Trans Gr (Proc. SIGGRAPH Asia). https://doi.org/10.1145/1409060.1409085
Daichin LSJ (2003) Evaluation of recursive PIV algorithm with correlation based correction method using various flow images. KSME Int J 17:409–421
Dalziel SB, Hughes GO, Sutherland BR (2000) Whole-field density measurements by ‘synthetic schlieren.’ Exp Fluids 28(4):322–335
Elsinga GE, van Oudheusden BW, Scarano F, Watt DW (2004) Assessment and application of quantitative schlieren methods: calibrated color schlieren and background oriented schlieren. Exp Fluids 36:309–325
Gojani AB, Kamishi B, Obayashi S (2013) Measurement sensitivity and resolution for background oriented schlieren during image recording. J vis 16:201–207
Hart DP (2000a) Super-resolution PIV by recursive local-correlation. J vis 3:187–194
Hart DP (2000b) PIV Error Correction. Exp Fluids 29:13–22
Hecong L, Chongyuan S, Weiwei C (2020) Time-resolved three-dimensional imaging of flame refractive index via endoscopic background-oriented Schlieren tomography using one single camera. Aerosp Sci Technol 97:105621
Hirose Y et al (2019) The quantitative density measurement of unsteady flow around the projectile. J Flow Control Meas vis 7(2):111–119. https://doi.org/10.4236/jfcmv.2019.72009
Kak AC, Slaney M (1988) Principle of computerized tomographic imaging. IEEE Press, New York
Meier GEA (2002) Computerized background-oriented schlieren. Exp Fluids 33:181–187
Mitschke F (2009) Fiber optics: physics and technology. Springer, Verlag Berlin Heidelberg
Nicolas F et al (2016) A direct approach for instantaneous 3D density field reconstruction from Background Oriented Schlieren (BOS) measurements. Exp Fluids 57(1):13
Nicolas F et al (2017a) Experimental study of a co-flowing jet in ONERA’s F2 research wind tunnel by 3D Background Oriented Schlieren. Meas Sci Technol 28(8):085302
Nicolas F, Donjat D, Léon O, Le Besnerais G, Champagnat F, Micheli F (2017b) 3D reconstruction of a compressible flow by synchronized multi-camera BOS. Exp Fluids 58:46
Ota M, Hamada K, Kato H, Maeno K (2011) Computed-tomographic density measurement of supersonic flow field by colored-grid background oriented schlieren (CGBOS) technique. Meas Sci Technol 22:104011
Ota M, Leopold F, Noda R, Maeno K (2015) Improvement in spatial resolution of background-oriented schlieren technique by introducing a telecentric optical system and its application to supersonic flow. Exp Fluids 56(3):1–10
Raffel M (2015) Background-oriented schlieren (BOS) techniques. Exp Fluids 56(3):1–7
Raffel M et al (2018) Particle image velocimetry: a practical guide, 3rd edn. Springer International Publishing
Raffel M, Richard H, Meier GEA (2000) On the applicability of background oriented optical tomography for large scale aerodynamic investigations. Exp Fluids 28:477–481
Ukai T, Russell A, Zare-Behtash H, Kontis K (2018) Temporal variation of the spatial density distribution above a nanosecond pulsed dielectric barrier discharge plasma actuator in quiescent air. Phys Fluids 30:116106
Venkatakrishnan L, Meier GEA (2004) Density measurements using the Background Oriented Schlieren technique. Exp Fluids 37:237–247
Venkatakrishnan L, Suriyanarayanan P (2009) Density field of supersonic separated flow past an afterbody nozzle using tomographic reconstruction of BOS data. Exp Fluids 47:463–473
Westerweel J (2000) Theoretical analysis of the measurement precision in particle image velocimetry. Exp Fluids 29:S003-S012
Acknowledgements
Special thanks are directed towards Mr. Katunari Ota in Osaka Institute of Technology and Mr. Takahito Sakai in TOKAI SANYU TECHNOS Co., Ltd for supporting the experimental setup.
Funding
This work was supported by JSPS KAKENHI Grant Number 20K14655.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Ukai, T. The principle and characteristics of an image fibre Background Oriented Schlieren (Fibre BOS) technique for time-resolved three-dimensional unsteady density measurements. Exp Fluids 62, 170 (2021). https://doi.org/10.1007/s00348-021-03251-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-021-03251-2