
Abstract
Two quantitative schlieren methods are assessed and compared: calibrated color schlieren (CCS) and background oriented schlieren (BOS). Both methods are capable of measuring the light deflection angle in two spatial directions, and hence the projected density gradient vector field. Spatial integration using the conjugate gradient method returns the projected density field. To assess the performance of CCS and BOS, density measurements of a two-dimensional benchmark flow (a Prandtl-Meyer expansion fan) are compared with the theoretical density field and with the density inferred from PIV velocity measurements. The method’s performance is also evaluated a priori from an experiment ray-tracing simulation. The density measurements show good agreement with theory. Moreover, CCS and BOS return comparable results with respect to each other and with respect to the PIV measurements. BOS proves to be very sensitive to displacements of the wind tunnel during the experiment and requires a correction for it, making it necessary to apply extra boundary conditions in the integration procedure. Furthermore, spatial resolution can be a limiting factor for accurate measurements using BOS. CCS suffers from relatively high noise in the density gradient measurement due to camera noise and has a smaller dynamic range when compared to BOS. Finally the application of the two schlieren methods to a separated wake flow is demonstrated. Flow features such as shear layers and expansion and recompression waves are measured with both methods.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The schlieren technique is a well-known method to visualize density gradients in compressible flows (Settles 2001). Although with quite some variety in its implementation, it is commonly employed as a qualitative method only. A number of attempts have been reported to obtain a calibrated schlieren technique, such as the rainbow schlieren (Greenberg et al. 1995) and the calibrated knife-edge filter (Watt et al. 2000), in which the schlieren output (color hue or light intensity, respectively) is related quantitatively to one component of the light beam deflection.
In the present work two schlieren methods are considered which have the capability of yielding more complete quantitative information on the density field: calibrated color schlieren (CCS) and background oriented schlieren (BOS). Both methods provide the light deflection angle, and hence the projected density gradient, in both spatial directions in the viewing plane. The density gradient vector field is then integrated to obtain the projected density field. Since both components of the deflection are measured, an over-specified system of equations is returned for the density that is solved in the least squares sense using the conjugate gradient method (Medoff 1987).The advantage of the bi-directional schlieren methods is that a field integration can be used with only one reference condition in the entire domain, whereas the uni-directional methods have to rely on line integration, which needs a reference condition at each line. Also, the more complete information (data redundancy) in the bi-directional density gradient methods makes the density integration more reliable than in the uni-directional schlieren methods.
The density field can also be measured directly using interferometry. In comparison with interferometry, schlieren methods are robust and simpler. While quantitative schlieren methods require an integration procedure to obtain density, they avoid the process of fringe interpretation or phase unwrapping, which can be just as problematic. The present work demonstrates that CCS and BOS constitute an excellent alternative to interferometry for density measurements.
The CCS employs a standard schlieren optical setup, with a square light source in combination with a color filter in the cut-off plane and a color-CCD camera. The color filter is designed such that the color content in the schlieren image (relative levels of the RGB values) allows the deflection angle to be measured in two directions, in contrast to the uni-directional methods mentioned above. The use of color ratios to retrieve the deflection angle makes CCS relatively insensitive to light intensity variations. Two filter types have been investigated: a gradual variation of the filter color and a stepwise variation of the colors. The system is calibrated by measuring the color ratios at known uniform beam deflections, simulated by translation of the filter. A calibration function is generated for each pixel in order to obtain the deflection angle from the schlieren image recorded during the experiment.
The BOS experimental configuration (Klinge and Riethmuller 2002) is simpler in comparison to CCS. It employs a computer-generated random dot pattern, which in the present case is placed on the rear window of the test section. The background pattern is imaged by a high-resolution CCD camera. In contrast to CCS, the flow is out of focus in BOS. The pattern displacement, due to the refractive-index spatial distribution in the flow, is determined by a cross-correlation algorithm common to PIV. The need for interrogation windows in the cross-correlation and the fact that the flow is out of focus limit the spatial resolution.
Turbulent flows can be measured as far as the mean quantities are concerned. When the exposure time is relatively long with respect to the time scale of flow fluctuations, as in the case of the present experiments, a mean flow density field is returned by the measurement.
Because the two schlieren methods are new to supersonic flow research a proper assessment of their performance is needed. Therefore both schlieren methods have been applied to the flow around a 2-D wedge-plate model in a supersonic Mach 2 free stream flow (Fig. 1). The performance of both methods is first evaluated on the expansion fan located at the shoulder between wedge and plate, separating the uniform flow regions (1) and (2). The flow conditions in the expansion fan are well defined and a wide range of the density gradient is covered, which allow an assessment of accuracy, repeatability, spatial resolution, sensitivity, and dynamic range of the different methods. A simulation of the experiment reveals the intrinsic errors of CCS and BOS that are independent of the additional experimental uncertainty due to the facility, and gives a prediction of their performance. The experimental results are compared with those obtained from the simulation to identify the errors that depend on the facility. Moreover, the measurements are compared to the analytical results obtained from compressible flow theory (Prandtl-Meyer expansion) and the density inferred from PIV measurements. Finally the application of CCS and BOS to the separated wake flow behind the model is shown.

Color schlieren image of the Mach 2 supersonic flow around the 2D wedge-plate model
2 Experimental configuration
The flow around the model (Fig. 1) is generated in the transonic-supersonic wind tunnel of the Delft University of Technology Aerodynamics Laboratories (TST-27). The facility is a blow-down type with a test section of 280x270 mm2. The tunnel is operated at free stream Mach number M ∞=1.96. The stagnation pressure is set at 2.0 or 3.7 bar, to study the influence of the density level.
The 2-D wedge-plate model used for the experiments spans the width of the wind tunnel test section (280 mm). The model consists of a wedge with a sharp leading edge imposing a flow deflection of 11.31°, followed by a plate 50 mm long and 20 mm thick.
Figure 1 shows an example of a color schlieren image using the segmented color filter indicated in the inset. The following flow features are visualized: the bow shock (in blue) followed by the expansions on the upper surface at the shoulder and base corner (marked green). The flow separates at the base and the resulting shear layer appears as a blue line. The shear layers from the upper and lower corners of the base reattach thereby enclosing the recirculation region. At the reattachment location the streamlines are concave causing a recompression wave to be formed.
2.1 Prandtl-Meyer expansion
For the assessment of the schlieren methods the expansion located at the shoulder of the model is considered. The field of view is shown by the CCS image of Fig. 2. The flow conditions up to the base of the model can be predicted with inviscid shock-expansion theory. From theory the flow conditions in the wedge flow (region 1 in Fig. 1) are M 1=1.55 and ρ 1=0.90 kg/m3 or 1.6 kg/m3. The flow over the plate (region 2) has a local Mach number of M 2=1.94 and ρ 2=0.59 kg/m3 or 1.1 kg/m3.

. CCS image of the Prandtl-Meyer expansion. The continuous line indicates the integration area. Boundary conditions were applied in the square area b. Cross-plots of the density and the density gradient are made along the dashed lines. The mean and standard deviation of the density gradient in horizontal direction are calculated from the measurement data along the dotted lines
The expansion region consists of a continuous fan of Mach waves along which the density is constant. At the edges of the fan, on the limiting Mach waves, the density gradient is discontinuous, causing a kink in the theoretical density field.
In the discussion of the Prandtl-Meyer expansion fan the origin of the coordinate system is chosen at the shoulder of the model (Fig. 2). The integration area is indicated by the white frame. The gradient integration procedure requires knowledge of the density at least in one point, serving as the boundary condition. In the present case the boundary condition is chosen over a region in the pre-expansion state (1). Pixels close to the model surface (y<9 mm) are left out of the integration, because the deflection angles in this region exceed the range of the schlieren systems. Out-of-range deflection angles lead to incorrect density gradient measurements, which seriously affect the density solution in the vicinity of these points.
2.2 CCS setup
The CCS technique employs a standard Z-type schlieren setup (Fig. 3). A finite square ground glass diffuser is used as a source, placed in the focal plane of a collimating mirror, thus producing a beam of parallel light through the wind tunnel test section. All light can be assumed to be parallel to the optical axis, because the source dimensions are much smaller than the focal length of the mirror. The beam crossing the test section is deflected due to the gradient of the refractive index in the flow. Thus the final deflection is a projection of the gradients along the optical path. After crossing the test section the beam is collected by a second mirror of the same focal length f. For each point in the test section an image of the source is produced in the focal plane of the second mirror, or ‘cut-off plane’, where the schlieren filter is located. Assuming that the bundle of light rays going through a common point in the test section experiences the same amount of deflection, the shape of the image of the source is unaffected by its deflection. The deflection (ε x , ε y ) of a bundle causes a shift of the source image relative to the filter (Δx f, Δy f):

Schematic drawing of the CCS setup
Depending on the shift of the source image the hue of the light is changed by the filter. An image of the test section is formed onto the CCD of the camera (Sony DFW-V500), which records RGB images (8-bit each color) at a resolution of 640×480 square pixels. The plane of focus is located in the middle of the test section.
2.2.1 Graded filter
The graded filter is designed to have the colors change gradually over the filter according to:
The x f- and y f-direction correspond to the x- and y-direction in the experiments, respectively, and are scaled with the range of the schlieren system (x f, y f∈[0,1]). The color ratios B/R and G/R are used to retrieve the position of the source image. Sensitivity in this approach is relatively independent of the source size and can be adjusted by scaling the dimensions of the filter.
A digital image of the color filter according to Eq. 2 is displayed on a computer screen and then recorded with a photo camera on a film with fine grain. The resulting slide is used as the graded filter. The size of the filter is 21×21 mm2. The graded filter can be used in combination with a relatively small source, as the color ratios change gradually.
The measuring range of the color schlieren system depends on the dimensions of the filter b f and source b s in combination with the focal length of the second mirror f:
In the present case b f=21 mm, b s=3mm, and f=3.5 m returning ε range=5.2 mrad. Since the filter is square in shape, the range is the same in both directions. With the filter in the central position, meaning that zero beam deflection corresponds to the center of the filter, deflections can be measured on the interval [−2.6, +2.6] mrad.
The dynamic range of the schlieren system can be related to the dynamic range of the camera. The 8-bit color channels result in a theoretical sensitivity of 0.39% of the full range given by Eq. 3. The dynamic range is then found to be 128 with a minimum detectable deflection angle of 0.020 mrad.
2.2.2 Segmented filter
The segmented filter is shown in Fig. 1. The segments are made from pieces of Kodak Wratten gelatin filter. Light passing through the blue portion of the filter will contribute only to the blue value in the recorded RGB image. The same holds for the other colors. The 8-bit RGB values corresponding to the location of the source image relative to the filter are given by:
The above equations state that the position (x f, y f) of the source image on the filter can be retrieved from the schlieren image through the color ratios (R+G)/(R+G+B) and R/(R+G), respectively. The measuring range of the system using the segmented filter depends on the size of the source as displacements larger than the size of the source will saturate on blue, green, or red. It is therefore necessary to use a relatively large source in combination with this filter. The range and sensitivity adjustment is achieved by changing the source dimension.
The theoretical range of the segmented filter schlieren system depends on the dimensions of the source b s, provided the filter is at least twice the size of the source in both directions. The range for the segmented filter is:
A source b s=12 mm returns in the present case ε range=3.5 mrad. With the filter in the center position, deflections can be measured in both directions on the interval [−1.7, +1.7] mrad.
Like for the graded filter, the 8-bit quantization of the camera color channels determines the dynamic range. For the segmented color filter the dynamic range is not identical for both directions. The minimum detectable displacement of the source image in the x and y directions is given by the unit change in the numerator of the color ratios (R+G)/(R+G+B) and R/(R+G), respectively. Starting with the source image at the center position on the filter, the displacement is 0.20% of the full range in the x direction and 0.39% in the y direction, corresponding to minimum detectable deflection angles of 0.007 mrad and 0.013 mrad. The dynamic range in the x and y direction is 255 and 128, respectively.
2.3 BOS setup
The BOS technique employs a computer-generated random dot pattern, which is placed on the outside of the rear window of the test section (Fig. 4). The main advantage over conventional schlieren is that fewer optical components are required. The rear window can even be replaced by a background pattern directly mounted on the wind tunnel wall, in which case only one optical access is required. The current BOS system is designed to have the same field of view as CCS.

Schematic drawing of the BOS setup in schlieren (blue) and PIV-mode (red)
Back lighting is used to illuminate the background pattern. Light traverses the background and rear window before entering the test section, where it is deflected by the gradient of refractive index as for CCS. The deflection of the light bundle coming from any point in the background will appear as a displacement of this point in the background, because schlieren object and background are at a distance Z D. To obtain the displacement both a reference (no deflection) and a flow (schlieren object present) image need to be recorded. Note that the CCD camera is focused on the background and not on the flow as for CCS. Therefore the flow is not imaged sharply.
Once the field of view and the interrogation area for cross-correlation are chosen, the sensitivity and range of the system can be determined. As a general rule the maximum displacement that can be measured with accuracy according to spatial resolution constraints should not exceed half the interrogation window. In the present study interrogation windows of 31×31 pixels are used and a displacement in the range [−16, 16] pixels can be detected in both x and y direction.
Scarano and Riethmuller (2000) provide an indication for the minimum detectable displacement in the correlation as being 0.04 pixel. The dynamic range for the present setup, therefore, is estimated at 400. The corresponding minimum and maximum deflection angle are 0.012 and 4.8 mrad, respectively.
A synthetic PIV image is generated to serve as a background. The image is printed at a resolution of 20 pixels/mm, so the pixel dimensions of the synthetic background and the recorded BOS image are equal. The particle images are located randomly and have a Gaussian intensity profile with 2.5 pixels diameter and a density of 0.1 particles per pixel. By creating a synthetic image the distribution of particles can be controlled in order to maximize the sub-pixel accuracy in the cross-correlation. The distorted particle image pattern will be shown and discussed later (Fig. 12). A randomly generated pattern of white and black squares is also investigated.
The bundle of light rays going through a certain point in the test section is certainly not parallel, but forms a large cone. The portion of the cone that is used to create the BOS image depends on the imaging optics. Two choices for the setup are discussed in the present paper: first the ‘PIV-mode’ and second the ‘schlieren-mode’ (Fig. 4). Presented results of the BOS method are mostly related to the application in ‘schlieren-mode’.
2.3.1 PIV-mode
BOS in ‘PIV-mode’ involves the fewest components: a lens, a CCD camera, and the background. The camera is placed on a tripod at a distance of 120 mm from the front window and focused on the background (Fig. 4). In the present experiment a Dantec Sensicam camera is used (1280×1024 pixels, 12-bit black and white) with a Nikon 60-mm focal length objective. With the camera close to the tunnel, the rays from the edges of the field of view collected by the imaging optics are far from parallel to the optical axis. Therefore the gradient of refractive index along the optical path cannot be assumed constant in this configuration. In addition, due to these perspective effects, the imaged field of view is scaled to the dimensions of the field of view at the center of the test section (Klinge and Riethmuller 2002). The displacements, however, are not scaled.
2.3.2 Schlieren-mode
BOS in ‘schlieren-mode’ uses the second mirror, lens, and camera position of the CCS setup. At the focal plane of the mirror a diaphragm is placed. A telecentric lens can be used to perform the same function as the mirror with diaphragm. The divergence of the light cone captured by the imaging optics can be made as small as for CCS by sufficiently closing the aperture. Thus the light beam is approximately parallel to the optical axis and the results do not need to be scaled to schlieren object dimensions.
Light rays coming from a single point in the background and captured by the imaging optics form a cone, as mentioned before (neglecting refraction effects). The base of that cone at the front window is called the resolution area with diameter R. All rays in that cone are imaged onto one point. The imaged point on the CCD therefore contains the density gradient averaged over all points within the resolution area, which is a measure for the blurring of the flow resulting from the defocusing. Neighboring points do not contain independent information as their resolution areas are overlapping. Therefore the interrogation window used in the correlation (31×31 pixels or 1.6×1.6 mm2 in the background plane), over which the displacement or density gradient is averaged, can be chosen as large as the resolution area without loss of information (Klinge and Riethmuller 2002). The diameter of the resolution area is given by:
where θ s (spread) is the top angle of the light cone, n g is the refractive index of the glass tunnel windows, D is the aperture of the diaphragm, and f is the focal length of the mirror. For the BOS camera in ‘schlieren-mode’ the resolution area is 5.3 mm (reference experiment), and with the aperture of the diaphragm reduced to 20 mm, the resolution area is 1.8 mm. For the ‘PIV-mode’ non-parallel light is more important for the resolution than the spread, because the angle between the optical axis and the light bundle can be much larger than the spread of the bundle itself.
3 Data processing
From the recorded CCS or BOS images the light beam deflection angle is determined first. Both methods then follow the same procedure to obtain the density field from the measurement of the deflection angle.
3.1 Obtaining the deflection angle from CCS images
The deflection angle in a CCS image is found from two independent color ratios, which are related to the displacement of the source image in the cutoff plane by a calibration function. To calibrate the system the filter is translated relative to the source image. For 25 positions of the source image on the filter (5×5 array) a calibration image is recorded returning 50 color ratios at each pixel. The deflection angles and color ratios for the graded filter are illustrated for three different pixels in Fig. 5.

Calibration of the graded filter, showing color ratios along lines of constant εx (-) and εy (--). Red, blue and black indicate the result at different pixel locations
The graded filter uses the following third order calibration function in the variables B/R and G/R in the x and y directions:
The coefficients are obtained from a least squares regression at each pixel. Although the graded filter was designed for a linear response to only one color ratio per direction according to Eq. 2, a linear function was found to be insufficient. The reason for this is that the response of the photographic film, from which the filter is constructed, to the image on the computer screen is slightly different than expected. This can be corrected with a more accurate filter, or by making use of a higher-order calibration function, which is chosen for the present study.
After calibration the filter is returned to the center position, where the inferred deflection angle is no longer zero, but a small value resulting from the calibration function fitting. Therefore a reference image is recorded. With the color ratios in this image and the calibration coefficients the reference deflection angle is found at each pixel (Eq. 7).
Finally a flow image is recorded with the schlieren object (density field) present. From the flow image the light deflection angle is obtained in the same way as for the reference image. Then the reference deflection angle is subtracted to yield the beam deflection angle resulting from the presence of the schlieren object.
The segmented filter follows the same procedure as the graded filter only with different color ratios. However, a fourth-order calibration function was found to be necessary to account for nonlinear response.
3.2 Obtaining the deflection angle from BOS images
The interrogation of the reference and flow BOS images is performed with an advanced cross-correlation technique. The technique was originally developed for PIV and is based on the deformation of the interrogation windows with an iterative multi-grid scheme (WIDIM, Scarano and Riethmuller 2000). The displacement d in the background plane is given by WIDIM in pixel units. The deflection angle ε is given by:
where h is the physical dimension of a pixel in the background plane. Z D is the distance parallel to the optical axis between the background and the intersection point of the disturbed (flow image) and undisturbed (reference image) light rays (Fig. 6). It should be mentioned that no calibration is needed to evaluate the deflection angle from BOS images.

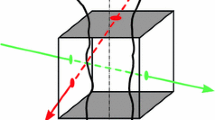
BOS ray traces through the test section (II) and glass windows (I and III) for presence (flow) and absence (ref.) of a gradient of refractive index field in the test section. The rays as seen by the imaging optics (IV) are traced back to the background (dashed lines)
Since the background is mounted on the back window, the width of the schlieren object W cannot be neglected with respect to the distance between background and schlieren object, as in some previous BOS studies (e.g., Klinge and Riethmuller 2002; Raffel et al. 2000). Moreover, the tunnel windows are relatively thick (t=36.5 mm) compared to the width of the schlieren object (W=280 mm). Due to the glass windows the imaging optics perceives the background to be not at its true position but at a different location, which is called the virtual plane of focus (Beach et al. 1973).
In order to find the virtual POF and the expression for Z D, a ray trace is performed in a 1-D density field (the density depends on the y coordinate only, region II in Fig. 6) enclosed by two glass windows of equal thickness t (regions I and III). Figure 6 shows two rays: one with a density gradient present (labeled ‘flow’) and one at constant density (‘ref.’). The ray trajectories between the wind tunnel and imaging optics (region IV) are extended backwards to the background (dashed lines).
From their intersection point and the virtual POF the distance Z D is found using:
In the present case Z D=164 mm is found, where n g=1.5 is the refractive index of the glass windows.
3.3 Density gradient and integration procedure
The total beam deflection results from the gradient of the refractive index integrated along the optical path. Further, the refractive index depends on the density according to the Gladstone-Dale relation, i.e., n=1+Kρ. The Gladstone-Dale constant K depends weakly on the wavelength of light. For color schlieren measurements this introduces a negligible error when the same constant is used for all wavelengths. The flow under investigation is 2-D and therefore it is assumed that the gradient of the refractive index is constant along the optical path (side wall effects are neglected). The assumption is valid for deflection angles sufficiently small, implying negligible displacements of a light ray normal to the optical axis. Furthermore, the light beam traverses the medium at small angles with respect to the optical axis and therefore the length of the optical path can be taken equal to the width of the schlieren object W. Thus the density gradient ∇ρ is found from the deflection angle ε using:
Finally the density gradient is spatially integrated by numerically solving:
where ρ is the array containing the density value at each pixel, g is the array containing the x and y components of the density gradient at each pixel, and D is a sparse matrix incorporating a second order accurate central differencing scheme. Boundary conditions are applied at a small section of the integration area in the pre-expansion state. The pre-expansion density is calculated from the free stream conditions and the bow shock relations (Sect. 2.1). The final system of equations is overspecified and is solved in the least squares sense using the conjugate gradient method (Medoff 1987). The method is an iterative scheme that uses the difference between the left- and right-hand side of Eq. 11 to update the solution. The step direction is orthogonal to all previous iteration steps. The conjugate direction method is guaranteed to converge for finite-dimensional problems.
The results (density and density gradient) are presented as dimensionless quantities using the pre-expansion values as reference: ρ 1 and W/ρ 1. The density ratio in the Prandtl-Mayer expansion depends on the free stream Mach number only, which is the same for all experiments, allowing a direct comparison of the results.
4 Experiment simulation
A simulation of the CCS with the graded filter and BOS experiment in ‘schlieren-mode’ is performed to predict the theoretical accuracy of the schlieren methods under ideal conditions and to investigate to what extent the discontinuity in the density gradient at the edges of the Prandtl-Meyer expansion fan can be resolved. Based on ray-tracing, synthetic CCS and BOS images are generated. The synthetic images are analyzed, as in the case of the experiment described above, to give the density field for the simulated experiment.
4.1 Synthetic CCS and BOS image
Upon entering the wind tunnel test section (CCS using a point source), a bundle of parallel light rays is traced (Sharma et al. 1982) through the refractive index field of the Prandtl-Meyer expansion fan. The deflection angles are converted to colors using the properties of the graded filter to form the synthetic CCS image. Reference and calibration images for CCS are produced without the need for ray tracing since the beam deflection is zero or uniform. The calibration images are taken for the same deflection angles as in the real CCS experiment with the graded filter.
BOS uses the same ray trajectories as CCS; only the direction of light propagation is different. Because light collected by the imaging optics for BOS in schlieren-mode is parallel when leaving the test section (infinitely small aperture of the diaphragm), a bundle of parallel light is traced back through the refractive index field to the background. Therefore in BOS the position of the rays is a rectangular mesh for the flow image, while for the reference image (the position of the rays in the background plane) the mesh is skewed. Because the flow image forms a rectangular grid, the synthetic background image is used for the ‘flow’ image and the ‘reference’ image is the deformed pattern.
Figure 7 presents the synthetic images for CCS and BOS. The CCS image is black in the region where the light deflection angle exceeds the detection range of the system. Moreover, the CCS image shows a line of increased intensity just in front of the expansion fan. When a light ray crosses the forward Mach wave into the uniform flow area, the ray progresses in a straight line. In that case the ray trajectory no longer resembles a parabola and in the plane of focus (middle plane of the wind tunnel test section) the ray does not return to the position at which it entered the test section, but appears in front of the expansion fan as a local increase of the light intensity. No light rays cross the rearward Mach wave and as a result the light intensity shows no change in that region.

Synthetic CCS image (left) and the distorted background image for BOS (right)
The dimensions of the background elements are kept constant in the creation of the distorted BOS image. When the displacement gradient is larger than 1 pixel per pixel, either pixels will fall on top of each other or black pixels appear in the BOS image, because there is no ray in the vicinity of that pixel. Figure 7 shows overlapping pixels near the forward Mach wave and black pixels near the rearward Mach wave. The extent of these regions depends on the deflection angle and hence the distance to the expansion corner. In a true BOS image the white and black regions at the limiting Mach waves will introduce image blur. The image blur will affect the cross-correlation on the BOS images. However, for y>15 mm the influence is small.
4.2 Density results for the simulations
The density result obtained from processing the synthetic images is presented in Fig. 8. The density profiles across the expansion fan show a good agreement with Prandtl-Meyer theory, meaning that both schlieren methods are capable of capturing the step change of the density gradient at the limiting Mach waves. The BOS results however indicate small errors rounding the density gradient step and hence the kink in the density profile due to the size of the correlation windows. At y=10 mm the density gradient obtained with BOS is inaccurate, resulting in a large error in the density field. This is caused by the limited spatial resolution and the relatively large amount of saturated and black pixels (corresponding to image blur) at that location. Furthermore the cross-correlation is not able to capture the large displacement gradient.

Density obtained from the synthetic CCS and BOS experiments. BOS is also integrated on a small integration area (y>15 mm) to eliminate inaccurate density gradients
For CCS a small over-prediction of the density step change over the expansion is observed. At x=50 mm, y=10 mm the difference with input density ratio field is −0.006. This is the result of rounding errors in recording an 8-bit RGB image.
The incorrectly measured gradient near the model has a large effect on the overall density field and therefore the BOS density gradient was integrated over a smaller area, which reduced this effect (Fig. 8). For the normal integration area the difference in the density ratio with respect to theory is 0.010 at x=50 mm, y=20 mm, but for the small area it is only 4×10−4.
5 Experiments
This section presents the results obtained for the CCS method with the graded filter and BOS with the camera in ‘schlieren-mode’. The results obtained with CCS using the segmented filter and BOS in ‘PIV-mode’ are discussed briefly.
The mean and standard deviation of the dimensionless density gradient in the horizontal direction as well as the difference in the density ratio Δρ/ρ 1 with respect to analytical results from Prandtl-Meyer theory form the basis of the discussion of the performance (accuracy, repeatability, spatial resolution, sensitivity, and dynamic range) of the schlieren methods, which is saved for Sect. 7.
The mean μ and standard deviation σ of the dimensionless density gradient in the horizontal direction are calculated at two locations (dotted lines in Fig. 2); the first is at y=40 mm, 9.8 mm<x<25.2 mm and the second at y=10 mm, 25.2 mm<x<55.9 mm. These regions are uniform flow regions according to theory, meaning that the density gradient is zero. Moreover, in the measurements the density gradient is not zero, but constant to a good approximation. The location at which the error in the density ratio is determined, appropriately chosen in the uniform flow regions, depends on the schlieren method.
5.1 CCS results
An example of a CCS image was given in Fig. 2. Figure 9 provides the corresponding magnitude and direction of the density gradient (left). Near the shoulder the deflection angle exceeds the measurement range. In the CCS image this appears as a black region, since the light is deflected off the filter and leaves the system. The dark or black pixels result in incorrect measurements, which are left out of the integration area. Over the expansion fan the colors change gradually in the CCS image, yielding a gradual decrease of the magnitude of the density gradient away from the model, as expected from Prandtl-Meyer theory. The density field resulting from the integration is shown in Fig. 9 (right). The expansion fan is clearly visible. In the uniform flow regions a small density variation can still be appreciated.

Density gradient obtained from the CCS image of Fig. 2 (left) and resulting density field (right)
5.1.1 Graded filter
Table 1 shows the mean and standard deviation of the dimensionless density gradient in the horizontal direction as well as the difference in the density ratio with respect to the analytical solution for different experiments. The difference in the density ratio is taken at x=50 mm, y=10 mm in the post-expansion region (2), at a distance of 42.4 mm from the boundary conditions, indicating the typical error in the density field. Errors in the measured density gradient and the noise level are given in terms of mean μ and standard deviation σ.
To further quantify the results, Fig. 10 shows profiles of the density gradient in the horizontal direction as well as the density itself. The density gradient shows random fluctuations that limit the sensitivity in the measurements. The high noise level results in a relatively large standard deviation (Table 1). In addition to random electronic noise, further uncertainty is introduced by truncation errors due to the color image formatting of the camera. The camera CCD measures in the 8-bit YUV domain. The YUV image is then turned into an 8-bit RGB image by a linear transformation. Since the measurement is rounded twice to 8-bit and the individual color channels in the RGB image depend on Y, U, and V, the noise in the RGB is larger than a one-unit change in color value. As a result, the actual sensitivity is lower than the theoretical, which is based on a one-unit change. The standard deviation of the dimensionless density gradient in the horizontal direction is 3–5 times the theoretical sensitivity. The error can be reduced by 40% by averaging the deflections of 5 flow images and 3 reference images of the same experiment (Fig. 10). Interestingly, averaging has no noticeable effect on the resulting density.

Measured x- component of the density gradient (left) and resulting density (right) for CCS; a single image (blue), averaged result (green) and Prandtl-Meyer theory (red line)
From Table 1 the effects of the source dimension and the gas density level with respect to the reference measurement (labeled ‘experiment I’) are investigated.
Decreasing the source from 3×3 mm2 to 1×1 mm2 results in a relatively large change in the mean dimensionless density gradient at y=10 mm, again leading to large differences in the density. While the source area and light intensity from the source is reduced by a factor of 9, the shutter time needed to maintain the same color values in the RGB image (hence the illumination) is only increased by 6.5. This indicates that the experiment with the small source suffered from a large amount of background or stray light (~30%) even though the experiments were performed in the dark. For the large source the amount of stray light is estimated to be 4%. The background light introduces inaccuracies in the color ratios resulting in a less accurate density field for the small source.
Finally, increasing the pre-expansion density 1.85 times significantly reduces the standard deviation of the dimensionless density gradient. The mean value of the density gradient directly scales with the overall density level, but the standard deviation is relatively independent of it. Camera noise can largely explain this behavior. Fluctuations in the color values produce fluctuation in the measured density gradient independent of the flow conditions. These fluctuations are then divided by the pre-expansion density, which has doubled, thus resulting in a lower standard deviation. The error in the density ratio is very different from the other experiments, due to the inclusion of out-of-range measurements in the integration area. For the lower density the region of out-of-range density gradients does not extend beyond y=9 mm, but for the increased density it reaches y=17 mm, largely affecting the overall density field and returning a large density error (Table 1).
5.1.2 Segmented filter
For the segmented filter the integration area is adapted to the measuring range of the filter. The density gradient is therefore not integrated below y=19.2 mm. Figure 11 presents the resulting density. The density profiles are similar to those obtained with the graded filter (Fig. 10) and the agreement with theory is good.

Density cross-plots for two CCS experiments using the segmented filter and Prandtl-Meyer theory (red line)
Table 2 shows the mean and standard deviation of the dimensionless density gradient in the horizontal direction as well as the difference in the density ratio with respect to the analytical solution. The difference in the density ratio is taken at x=50 mm, y=20 mm in the post-expansion region (2), at a distance of 36.1 mm from the boundary conditions.
From a comparison of the results for the graded and segmented filter (experiments I and II of Tables 1 and 2) it is observed that the density difference with respect to theory as well as the mean dimensionless density gradient μ return similar values. The theoretical limit of detection of the segmented filter is smaller than for the graded filter (Sect. 2.2). Therefore the standard deviation σ is generally smaller than observed with the graded filter.
5.2 BOS results
The left side image of Fig. 12 presents a BOS recording obtained during the experiment (with flow in the test section). From the image the complete expansion fan cannot be perceived by visual inspection. A small portion of the expansion near the shoulder of the model is visible as blur. The gradient of pixel displacement is high (high second spatial derivative of density), which leads to deformation of the particle patterns in the flow image. This phenomenon is also seen in the boundary layer on the model surface. The complete expansion fan becomes visible only after cross-correlating the reference and flow image, or alternatively after displaying the absolute difference in pixel values of the two images (Dalziel et al. 2000) as shown in Fig. 12 (right). The density gradient calculated from the displacement field is shown in Fig. 13 (left). The BOS system is able to resolve the gradient in most of the expansion fan. Near the shoulder of the model the blur in the BOS image is significant and the length scale of the expansion collapses to a few millimeters. This causes the magnitude of the measured density gradient to be inaccurate, although the direction of the gradient is still accurate. The resulting integrated density field is given in Fig. 13 (right).

BOS pattern image recorded during the experiment (left) and the absolute difference in pixel values of the pattern image recorded before and during the experiment (right). Notice that in the BOS recording image (left) blur is visible at the shoulder

Density gradient obtained from the BOS image of Fig. 12 (left) and resulting density field (right)
BOS is sensitive to mechanical displacement of the background between the recording of the reference image and the flow image causing an offset in the measured density gradient. The BOS measurements have been corrected for this offset by applying two additional boundary conditions on the density in the uniform flow region behind the expansion (2), as described in Sect. 5.2.3.
5.2.1 Schlieren-mode
Table 3 shows the mean and standard deviation of the dimensionless density gradient in the horizontal direction and the difference in density ratio with respect to the analytical solution for the BOS experiments in ‘schlieren-mode’. The difference in the density ratio is taken close to the expansion fan at x=8 mm and y=9 mm where the differences generally prove to be largest. A different location from the one used for CCS needs to be chosen, because boundary conditions are applied in the post-expansion region (2) resulting in a small error in density (Sect. 5.2.3). The synthetic background pattern is used for the experiments unless indicated otherwise. The density difference, mean μ and standard deviation σ again indicate the typical error in the density field, density gradient, and the noise level, respectively. Compared to CCS a significantly lower noise level is observed for BOS.
Three factors that can influence the BOS performance are investigated: the background pattern, the aperture of the diaphragm, and the flow density.
First the results obtained with the synthetic pattern with Gaussian particles are compared with the random pattern of black and white squares. The different background patterns return comparable results (Table 3), so the influence of the background pattern is concluded to be very small. Diffraction limited imaging alleviates the problem of pixel locking in the case where the random pattern of black and white squares is used (Westerweel 1993).
The cone of light rays captured by the imaging optics is reduced by changing the aperture of the diaphragm located in the focal plane of the mirror. By reducing the spread of the light cone that is imaged onto a pixel, the depth of focus is increased and the spatial resolution is improved (a larger portion of the flow is in focus). While the mean dimensionless density gradient does not change appreciably, the standard deviation is reduced at y=40 mm associated with an improved correlation signal-to-noise ratio.
Finally the influence of the density level is investigated. The range of the BOS system is large enough to capture the density gradient in almost the whole integration area accurately after the density and thus the density gradient is doubled. This is illustrated by the differences in the mean dimensionless density gradient between experiment I and the experiment with increased density (Table 3). However, the difference of the density ratio is quite large, because for BOS it is measured close to the location where the gradient is out of range. Since the fluctuations in the density gradient are related to the sensitivity of the cross-correlation, they do not scale with density. Increasing the density therefore decreases the fluctuation in the dimensionless density gradient.
5.2.2 PIV-mode
The BOS experiments in ‘PIV-mode’ yield considerably different results. Due to non-parallel light the schlieren object is spread, even after scaling the dimensions to the schlieren object (Fig. 14). In non-parallel light the assumption that the density gradient is constant along the optical path is not valid. To recover the density gradient from the measurement with non-parallel light a more complex reconstruction method would be needed. Moreover, scaling the dimensions to the schlieren object introduces an error in its position. Misalignment of the camera causes the optical axis not to be at the center of the recorded image. Since the dimensions are scaled with respect to the optical axis (light is parallel near the optical axis location and therefore no correction is needed at this position), the scaling is performed with respect to the incorrect location, hence the shift in position (Fig. 14). A misalignment of 0.6° would explain a shift of 5 mm for the present setup.

Density cross-plot comparing BOS in schlieren-mode and PIV-mode
5.2.3 Spurious background offset
In order to ensure repeatable results for BOS an offset correction is needed to take into account small displacements of the background or camera. Any uncontrolled displacement adds to that caused by the schlieren object. Small vibrations of the camera force the use of relatively long shutter times (15 ms). Problems related to unsteady displacement of the tunnel and vibration are intrinsic to the supersonic wind tunnel environment.
A density plot of several BOS experiments (Fig. 15, right) shows that enlarging the shutter time is not enough to solve the problem, as the density profiles show a large scatter. The density gradient profiles, however, look very similar apart from a constant offset that is different for each experiment (illustrated by the x component of the density gradient in Fig. 15, left). More boundary conditions, and thus more prior knowledge on the flow, are needed to overcome this problem. Previous BOS applications (Klinge and Riethmuller 2002; Richard and Raffel 2001) also applied boundary conditions at both ends of the schlieren object.

Measured x component of the density gradient (left) and resulting density (right) for various BOS experiments; Prandtl-Meyer theory is given by the red line
The density differences (measured density with respect to the theoretical value) at two points in the post-expansion state are used to determine a constant offset in the two components of the density gradient, which are then subtracted from the measured gradients. The offset found in the experiments corresponds to approximately 0.3-pixel (15-μm) movement of the background between the tunnel at rest and during the run. The corrected gradients are integrated again. After the second integration the density in the two points, which were used to determine the offset, corresponds to the theoretical density. The density profile shows a considerable improvement (Fig. 16, constant offset). An alternative correction approach by directly applying additional boundary conditions on the density in the integration of the uncorrected data was found to return undesirable artifacts (Fig. 16, 4 BC).

Effect on density of BOS corrections
6 Experimental verification using PIV
PIV measurements of the Prandtl-Meyer expansion flow were performed as an experimental verification of the CCS and BOS measurements. Figure 17 presents the density profiles obtained with CCS and BOS. The general agreement between theory and measurements is good. However, both schlieren methods return a rounding of the theoretical kink at the edges of the expansion and a density variation in the pre-expansion region (1). Since PIV is a planar velocity measurement technique, it can be used to investigate whether the differences between theory, CCS, and BOS density fields are due to 3-D flow features (the boundary layers on the tunnel side-walls for example) or instead can be considered part of the 2-D flow.

Density cross-plots comparing experiment I for BOS and CCS on a Prandtl-Meyer expansion fan. PIV results are included for y≤20 mm
The standard 2-D PIV method provides measurement of the velocity vector in the center plane of the test section. For the present experiments the CCD camera was placed in ‘schlieren’ mode (same as for BOS). Further detail on the PIV setup can be found in Scarano and Van Oudheusden (2003).
The PIV measurement is performed to obtain the mean velocity field from the ensemble statistics of 174 instantaneous velocity fields. Assuming isentropic flow the planar density field is derived from the velocity magnitude distribution V using:
where γ is the ratio of specific heats (γ=1.4 for air). The post-expansion state (2) is chosen as the reference state, because the measured velocity field exhibits a large uniform region behind the expansion fan. The density ratio over the expansion ρ 2/ρ 1 is given by Prandtl-Meyer theory. Note that the density derived from the measurement of the velocity field is very sensitive to inaccuracies in velocity (Δρ~ΔV 5, Eq. 12).
Small systematic errors in the velocity measurement result from the finite inertia of the seeding particles causing their acceleration to be lower than that of the airflow (Melling 1997). This leads to a downstream shift of the density in the expansion. The particle 90%-relaxation length for the present flow conditions is estimated at 2 mm (Scarano and Van Oudheusden 2003).
6.1 Planar density field
The planar density profile is compared with theoretical and schlieren results in Fig. 17. The laser sheet covered only part of the flow, so results can only be given for y≤20 mm. The PIV result may be interpreted as the density in the middle plane of the test section. The schlieren density on the other hand is averaged over the width of the test section. The PIV density profiles confirm the schlieren results. The decreasing density in flow direction in the pre-expansion region and the smooth density profile at the edges of the expansion fan also appear in the PIV density profiles. The rounding at the edges does not result from the finite size of the interrogation window, since the simulated BOS experiment demonstrates that the cross-correlation technique is capable of resolving even steeper changes in the displacement field. It is therefore concluded that 3-D effects do not affect the flow.
7 Overall performance assessment
A final comparison of the performance of CCS using the graded filter and BOS in ‘schlieren-mode’ is made in terms of accuracy, repeatability, sensitivity, dynamic range, and spatial resolution. The results obtained for the reference and repeated experiment (labeled ‘experiment I and II’ in Tables 1 and 3) are used in the assessment.
7.1 CCS performance
The accuracy of the CCS density measurements based on the difference between the density ratio and theory (Table 1) is estimated at 2%. Using the integration length between the locations of the boundary condition and that where the density difference is evaluated, an average error in dimensionless density gradient equivalent to a 1.9% density difference (taken from experiment II, Table 1) can be derived to be 0.125, which is just above the theoretical limit of detection of the system (ε min/Kρ 1=0.099).
Larger discrepancies between theory and measurements are found at the edges of the Prandtl-Meyer expansion fan, where the second spatial derivative of density is high (Fig. 17) and the density gradient cannot be assumed constant along a ray trajectory. The results of the simulated experiment (Sect. 4) indicate that CCS is able to resolve most of the step change in the density gradient field. The rounding of the kinks in the experimentally observed density field is therefore ascribed to viscous flow effects in the true flow. The rounding effect and the density gradient in the region in front of the expansion fan are also found with BOS and in the planar density field obtained from PIV, which confirms that these features are not a result of limited spatial resolution or the integration of the density gradient along the optical path, but are part of the real 2-D flow and probably caused by the boundary layer on the wedge-plate model. The rapid or sudden expansion of the supersonic boundary layer has the effect of rounding the sharp corner of the model and defocusing the Mach waves (Weinbaum 1966). Three-dimensional effects related to the boundary layer on the tunnel windows are less important.
At y=10 mm the CCS and BOS density results differ slightly (Fig. 17). CCS does not follow the theoretical density profile as closely as BOS. The large deflections exceed the system dynamic range of the CCS at this location. The pixels are predominantly red and the other two color channels operate near threshold values. This reduces the accuracy for deflection angles near the maximum detectable deflection.
The repeatability of CCS is investigated through the comparison of different images of the same experiment (wind tunnel run) and a comparison of two different experiments I and II (different tunnel runs under the same nominal conditions). From the comparison of the two images of the same experiment it is concluded that the resulting density varies by only 1%, which is below the difference in the density between wind tunnel runs (1.6%). The mean dimensionless density gradient (Table 1) is also in good agreement since the changes are within the estimated sensitivity.
Sensitivity is a limiting factor in CCS due to high noise levels, as shown by the high standard deviation of the dimensionless density gradient in Table 1. The standard deviation can be 4–5 times the estimated limit of detection. A more sensitive CCD (12-bit) may improve this aspect, as well as pixel binning and averaging the results from multiple CCS images (Sect. 5.1.1). It should be emphasized however that the density is of interest and not its gradient. Since the gradient is integrated, noise will average out as long as the integration area contains a large number of points. Moreover, the integration procedure reduces the fluctuation, because both x and y components of the density gradient are used and the density converges to a global least squares solution.
The dynamic range of CCS is discussed from Fig. 18. The diagram shows the decreasing density gradient along a certain Mach wave inside the expansion fan. The distance r is measured along the Mach wave starting at the shoulder of the model. The maximum detectable density gradient has been determined from the figure, which divided by the noise level results in a dynamic range of only 40, due to the high noise level in the measured density gradient.

Absolute value of the density gradient along the Mach wave corresponding to a density ratio of 0.79 for ρ 1=0.9 kg/m3. The estimated maximum detectable density gradient for CCS and BOS is indicated in the figure
To study the spatial resolution, the dimensions of a pixel in the POF have been changed from 0.10 mm (experiment I) to 0.17 mm by increasing the field of view. The results at reduced resolution agree very well with experiment I (Table 1). It is concluded that spatial resolution is not a limiting factor for CCS.
7.2 BOS performance
The accuracy of the BOS density measurement, given by the density ratio difference with respect to theory (Table 3), is around 2%. The kink in the density field between expansion and uniform flow regions are also rounded as previously seen in CCS results.
The repeatability of BOS is good. The density measurement can be reproduced within 1.9% (Table 3). For BOS, however, prior knowledge of the flow is needed to achieve this level of accuracy because of the required correction for tunnel or camera movement, to which BOS is extremely sensitive. The mean dimensionless density gradient also shows a good agreement with the theoretical sensitivity for BOS (ε min/Kρ 1=0.058).
The standard deviation in the experiments I and II is comparable to the estimated sensitivity. In terms of measurement noise BOS clearly performs well considering that the sensitivity of BOS is higher than that of CCS.
The dynamic range is again assessed from Fig. 18. As expected, BOS is capable of measuring higher density gradients compared to CCS. The dynamic range, however, depends on the spatial resolution. For ρ 1=0.9 kg/m3 the maximum detectable density gradient is located relatively close to the model (low number of measurement points across the expansion) and a dynamic range of 160 is returned. For ρ 1=1.6 kg/m3 the maximum detectable density gradient is located further from the model (larger number of points) yielding a dynamic range of 210.
To further study the effect of spatial resolution, the pixel size in the background plane is increased from 0.049 mm (experiment I) to 0.090 mm by increasing the field of view. The synthetic background image is scaled accordingly. The mean density gradient at y=10 mm found at low resolution is not in agreement with other experiments (Table 3). At y=10 mm the width of the expansion in the x direction is only 8.7 mm, which corresponds to 5.7 or 3.1 interrogation windows for higher and lower resolution, respectively. At low resolution the number of interrogation windows (measurement points) in the expansion is insufficient to capture the expansion accurately. Hence the background displacement offset is not determined correctly, which affects the density gradient globally. The standard deviation σ increases with the increase of pixel dimensions. This is expected since the sensitivity is proportional to the pixel dimensions.
8 Application: separated wake flow
CCS and BOS have been used to measure the density in the separated wake flow behind the wedge-plate model to demonstrate the applicability of both methods to viscous compressible flows. The wake offers an opportunity to look at challenging flow features, such as shear layers, separated flow regions and recompression waves (Fig. 1).
Figure 19 presents the field of view. The portion of the wake that is integrated ranges from 12 to 39 mm behind the model and is indicated in Fig. 19 with a white rectangle. Boundary conditions are applied in the upper left corner of the integration area. Closer to the model the shear layer is too thin to be captured accurately and the beam deflection angles in the expansion located at the model base are out of range. The density is normalized with the value ρ 2 in the region upstream of the base corner expansion.

CCS image with graded filter (left) and focused shadowgraph image (right). The integration area is indicated by the continuous line with boundary conditions applied in the square area b. Cross plots of the density are made along the dashed lines
The CCS measurement shows a good agreement with predicted density levels. Using Prandtl-Meyer theory and the angle of the terminating Mach wave in the expansion (obtained from the CCS image), the expected density ratio behind the expansion is 0.48, which is also returned by CCS. In the recirculation region the density ratio is estimated at 0.20 assuming constant pressure and total temperature across the shear layer. CCS returns a higher value (0.25), which is ascribed to the total temperature decrease across the shear layer.
Figure 20 presents density profiles in the integrated portion of the wake along vertical lines at 13, 20, 30, and 37 mm behind the model. At 13 mm behind the model the measurements of CCS and BOS agree well. The density difference in the recirculation region, located around the symmetry axis (y=0), is caused by a slightly different measured density gradient in the shear layers. CCS returns a higher density gradient and thus lower density in the recirculation area. Similar behavior is seen across the recompression waves, 30 and 37 mm behind the model.

. Density cross-plots comparing CCS (blue) and BOS (green) in the wake
Furthermore it is seen that BOS is not able to measure the density across the expansion as accurately as CCS. The density plot at 37 mm behind the model has become almost a vertical line. This is due to the poor spatial resolution of the BOS system, as discussed in the previous section, which may also explain the lower density gradient found in shear layers and recompression waves.
An important remark is that the BOS density field is symmetrical while the CCS density is not (x=37 mm). The CCS measurement is affected by chromatic aberration of the imaging lens, as visualized in the focused shadowgraph of Fig. 19 recorded with the CCS setup, but without the filter in the cutoff plane. The index of refraction given the lens material is a function of wavelength or ‘color’. Each color has a different plane of focus and hence the color components of a refracted (white) light ray appear at different positions in the shadowgraph and CCS image. The color ratios change at some pixels even without a color filter present, which produce an error in the density gradient obtained from a CCS image, which shows up in Fig. 20 as an asymmetric density field. The color aberrations are partly corrected for using the relative increase of the RGB colors in the focused shadowgraphs (Watt et al. 2003), but the effect of the correction on the density field is limited.
The color aberrations and a few out-of-range values of the deflection angle in the shear layers cause local peaks in the density gradient, which in combination with the present central differencing scheme lead to the onset of wiggles in the density plot as shown in Fig. 20. These effects are most clear at 30 mm behind the model for negative values of the y coordinate. The wiggles may be reduced by applying another differencing scheme in the integration procedure or by removing out-of-range values of the deflection angle from Eq. 11.
9 Conclusion
Two quantitative schlieren methods with bi-directional sensitivity, calibrated color schlieren (CCS) and background oriented schlieren (BOS), were applied to the compressible flow around a 2-D wedge-plate model. The measured density gradient field was integrated using the conjugate gradient method. The techniques’ performances were assessed in terms of repeatability, sensitivity, dynamic range, and accuracy using the Prandtl-Meyer expansion fan. The schlieren measurements were compared with Prandtl-Meyer theory, simulated CCS and BOS experiments, and the density field derived from PIV measurements. Finally the application of CCS and BOS to a separated wake flow was shown.
The CCS density measurements agreed within 2% with Prandtl-Meyer theory. The uncertainty assessment yielded 2% too. The density gradient in the expansion fan was measured at a spatial resolution of 0.10×0.10 mm2 in this experiment (pixel scale) and with a dynamic range of 40. The sensitivity of CCS was around four times higher than the estimated limit of detection. However, the high noise level only weakly affected the density result because of the integration procedure.
The BOS density measurements also returned results in good agreement with theory and repeatable within 2%. The accuracy was 3%. For BOS a dynamic range of 210 could be obtained with a sensitivity comparable to the estimated limit of detection. The best spatial resolution achieved in the BOS experiments was 1.8×1.8 mm2 (limited by object blur).
The measured density gradients in BOS needed to be corrected for tunnel movement between the recordings of reference and flow images. Application of extra boundary conditions on the density was proposed to determine and correct for the tunnel movement.
The density found by the two schlieren techniques agrees well with theory. The largest differences with the analytical solution were found near the edges of the expansion, where the theoretical density profile showed a kink. The rounding of the kinks in the density profile was observed in both the CCS and BOS measurements, but also in the planar density field derived from PIV measurements. A simulation of the CCS and BOS experiment indicated furthermore that both techniques are capable of resolving the kinks in the density profile. Therefore it was concluded that the round edges of the density profile near the limiting Mach waves of the Prandtl-Meyer expansion fan are not caused by limited spatial resolution or the integration of the density gradient along the optical path, but is part of the true 2-D flow and is caused by the boundary layer on the model.
Insufficient resolution led to inaccurate results for BOS. Resolution was limited by the need for interrogation windows in the cross-correlation and the fact that the schlieren object was out of focus. CCS is less likely to have problems related to resolution since each pixel contains a measurement of the density gradient and the schlieren object is in focus.
BOS has the advantage of higher dynamic range. However, the sensitivity and range depend on the size of a pixel and thus the field of view. In CCS they are not connected, allowing more flexibility.
The density measurements in the wake flow proved to be a serious challenge for the two methods. CCS showed the onset of wiggles due to chromatic aberrations. BOS performed poorly due to the insufficient spatial resolution, underestimating the density difference across shear layers. The latter aspects require further attention, which is currently the subject of investigation in order to extend CCS and BOS to more complex flow conditions.
References
Beach KW, Muller RH, Tobias CW (1973) Light-deflection effects in interferometry of one-dimensional refractive index fields. J Opt Soc Am 63:559–566
Dalziel SB, Hughes GO, Sutherland BR (2000) Whole-field density measurements by ‘synthetic schlieren’. Exp Fluids 28:322–335
Greenberg PS, Klimek RB, Buchele DR (1995) Quantitative rainbow schlieren deflectometry. Appl Opt 34:3810–3822
Klinge F, Riethmuller ML (2002) Local density information obtained by means of the Background Oriented Schlieren (BOS) method. In: 11th international symposium on application of laser technololgy to fluid mechanics, Lisbon, Portugal, paper 15.3
Medoff BP (1987) Image reconstruction from limited data: theory and application in computerized tomography. Image recovery: theory and application. Academic Press, New York, pp 321–368
Melling A (1997) Tracer particles and seeding for particle image velocimetry. Meas Sci Technol 8:1406–1416
Raffel M, Richard H, Meier GEA (2000) On the applicability of background oriented optical tomography for large scale aerodynamic investigations. Exp Fluids 28:477–481
Richard H, Raffel M (2001) Principle and applications of the background oriented schlieren (BOS) method. Meas Sci Technol 12:1576–1585
Scarano F, Riethmuller ML (2000) Advances in iterative multigrid PIV image processing. Exp Fluids 29:S051
Scarano F, Van Oudheusden BW (2003) Planar velocity measurements of a two-dimensional compressible wake. Exp Fluids 34:430–441
Settles GS (2001) Schlieren and shadowgraph techniques: visualizing phenomena in transparent media. Springer, Berlin Heidelberg New York
Sharma AD, Viza Kumar D, Ghatak AK (1982) Tracing rays through graded-index media: a new method. Appl Opt 21:984–987
Watt DW, Donker Duyvis FJ, Van Oudheusden BW, Bannink WJ (2000) Calibrated schlieren and incomplete abel inversion for the study of axisymmetric wind tunnel flows. In: 9th international symposium on flow visualisation, Edinburgh, UK, paper 363
Watt DW, Elsinga GE, Van Oudheusden BW, Scarano F (2003) Theory and application of quantitative, bidirectional color schlieren for density measurement in high speed flow. In: international symposium on optical science and technology, SPIE, San Diego, paper 5191-25
Weinbaum S (1966) Rapid expansion of a supersonic boundary layer and its application to the near wake. AIAA J 4:217–226
Westerweel J (1993) Digital particle image velocimetry. PhD dissertation, Delft University Press, Delft
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Elsinga, G.E., van Oudheusden, B.W., Scarano, F. et al. Assessment and application of quantitative schlieren methods: Calibrated color schlieren and background oriented schlieren. Exp Fluids 36, 309–325 (2004). https://doi.org/10.1007/s00348-003-0724-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00348-003-0724-8