
Abstract
A numerical investigation is performed to examine the static bending behavior of piezoelectric nanoscale beams subjected to electrical loading, considering flexoelectricity effects and different kinematic boundary conditions. The nanobeams are modeled by the Bernoulli–Euler beam theory, and the stress-driven integral nonlocal model is used in order to capture size influences. It is also considered that the nanobeams are embedded in an elastic medium. The Winkler and Pasternak elastic foundation models are used for simulating the substrate medium. Based upon Hamilton’s principle and the electrical Gibbs free energy, the governing equations are derived which are then numerically solved via a finite difference-based method. Numerical results are presented to study the influences of nonlocal, flexoelectric and Winkler/Pasternak parameters on the bending response of piezoelectric nanobeams under various end conditions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Piezoelectric microbeams and nanobeams are extensively used in nanoscale and microscale devices and systems such as biosensors, field-effect transistors, energy harvesters, resonators, MEMS and NEMS [1, 2]. For an accurate design, understanding the mechanical behaviors of such small-scale structures under various loading conditions is necessary. Hence, several research works can be found on the mechanical analysis of piezoelectric microbeams and nanobeams including their vibrations, buckling and bending in both linear and nonlinear regimes. The majority of theoretical studies are based on the continuum mechanics theory due to its computational efficiency as compared to atomistic approaches. As size influences become significant when structures are scaled down to sub-micron levels and as the classical elasticity theory is size-independent, the modified versions of elasticity theory such as the surface elasticity theory [3, 4], strain gradient theory [5] and couple stress theory [6, 7] are widely utilized for the mechanical analysis of nanostructures and microstructures which are able to capture size effects.
The nonlocal elasticity theory (NET) is another size-dependent theory initiated by Eringen and his co-workers [8, 9]. Based on NET, the stress at a reference point is considered to be a functional of the strain field at the neighborhood of that point. Originally, the nonlocal constitutive equation was presented in integral form in which a kernel function was introduced for capturing nonlocality [8]. The differential nonlocal constitutive equation was then introduced by Eringen in [10]. A literature survey indicates that NET has been extensively used to date by many researchers for studying the behaviors of nanostructures [11].
However, it was shown that using the differential NET leads to paradoxical results in some cases (e.g., [12, 13]). An important paradox is related to the bending of clamped-free beams. More clearly, in contrast to other end conditions, the maximum deflection of nonlocal cantilever decreases with increasing the nonlocal parameter. Motivated by this paradox and some others, several attempts have been made for solving the integral nonlocal governing equations [14,15,16,17,18]. Recently, Romano et al. [19,20,21,22,23] proposed an integral nonlocal model called as “stress-driven” nonlocal model in which the characters of stress and strain fields are swapped. Romano et al. [22] commented that the equivalence of a differential formulation to the integral formulation without satisfying constitutive boundary conditions is not correct. The application of stress-driven nonlocal model to various problems of nanostructures has been reported by several researchers (e.g., [24,25,26,27,28,29]).
Electromechanical coupling of dielectrics plays an important role in the performance of systems/devices including piezoelectric nanostructures. In particular, piezoelectricity (generating electric charges reacted to uniform strain) has a significant effect on these systems. Also, flexoelectricity is another source of electromechanical coupling which is a spontaneous electric polarization made in dielectric crystals because of a strain gradient. A literature review shows that studying the influence of flexoelectricity on various mechanical behaviors of nanoscale structures has been the subject of several papers up to now. Some of the relevant papers are cited herein.
According to the extended linear piezoelectricity theory together with the first-order shear deformation beam theory, Yan and Jiang [30] studied the influence of flexoelectricity on the bending and vibrational behaviors of piezoelectric nanobeams with simply supported boundary conditions. Analytical expressions for the vibration and stability problems of piezoelectric classical nanobeams considering the surface, flexoelectric and nonlocal electric effects were presented by Liang et al. [31]. They reported that the surface and flexoelectric influences are important at a limited range of thickness; however, the effects diminish as the thickness increases. Li et al. [32] addressed the buckling, bending and free vibration problems of magneto-electro-elastic Timoshenko nanobeams based upon NET. It was revealed that positive electric potential and negative magnetic potential lead to decreasing beam’s stiffness. Yue and co-workers [33] developed a microscale first-order shear deformable beam model considering surface and flexoelectricity effects in order to investigate the behavior of beam under buckling and bending loads. The nonlinear formulation of piezoelectric Timoshenko nanobeams was developed by Tadi Beni [34] according to the consistent size-dependent piezoelectricity theory. Ebrahimi and Barati [35] analyzed surface effects on the dynamics of flexoelectric nanoscale beams resting on the Winkler-Pasternak foundation with various end conditions based on NET. It was found that flexoelectricity increases the frequencies, particularly for thin beams. In another paper [36], they studied the influences of magnetic field on the stability of smart flexoelectrically actuated piezoelectric nanobeams. Based on NET, the free vibrations of piezoelectric nanobeams embedded in viscoelastic foundation considering flexoelectric effect were investigated by Zhang et al. [37] using the Bernoulli–Euler beam theory. They reported that the frequencies of the nanobeams increase considerably as the flexoelectric coefficient gets larger. Recently, Zarepour et al. [38] used the extended theory of piezoelectricity and multiple scales technique for studying nonlinear vibrations of Timoshenko nanobeams. They considered the flexoelectricity effect and captured the size effect based upon NET. Theoretical range of flexoelectricity constant was estimated in their work through buckling. Also, Zhao et al. [39] developed a porous flexoelectric beam model according to the strain gradient elasticity. Wang and Feng [40] studied the effect of surface stresses on the vibration and buckling of piezoelectric nanowires. Also, Wang and Wang [41] analyzed surface effects on the buckling of piezoelectric nanobeams. Using the Kelvin–Voigt model, Malikan and Eremeyev [42] incorporated the viscoelasticity into the Bernoulli–Euler beam theory to investigate the effect of flexoelectricity on the response of piezoelectric nanobeams. In another paper, Malikan et al. [43] focused on the postbuckling of piezomagnetic and flexomagnetic beam-like nanostructures.
In the current work, based on the stress-driven integral nonlocal model, a numerical methodology is presented to address the bending problem of piezoelectric Bernoulli–Euler nanoscale beams taking the flexoelectricity influence into account. It is considered that the nanobeams are embedded in the Winkler-Pasternak foundation and have arbitrary boundary conditions. To obtain the governing equations, the electrical Gibbs free energy and Hamilton’s principle are utilized. Furthermore, on the basis of the finite difference method, matrix operators are developed for the numerical solution of the problem. In the numerical results, the effects of nonlocal, flexoelectric and Winkler/Pasternak parameters on the bending response of piezoelectric nanobeams subject to different boundary conditions are studied.
2 Governing equations
The electric Gibbs free energy density can be expressed as [37]
where aij, bijkl, cijkl, eijk, μijkl, Ei, Ɛij.l, Ek.l denote dielectric constant tensor, nonlocal electrical coupling coefficient tensor, elastic stiffness tensor, piezoelectric coefficient tensor, flexoelectric coefficient tensor, electric field vector, gradient of strain and gradient of electric field, respectively.
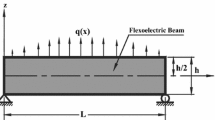
Figure 1 shows the geometry and coordinates of the considered piezoelectric nanobeam. Based on the Bernoulli–Euler beam theory, the displacement field is formulated as follows:

Geometry and coordinates of the piezoelectric nanobeam
Using Eq. (2) together with the relation of \(\varepsilon_{ij} = \frac{1}{2} \left( {u_{i,j} + u_{j,i} } \right)\) one has
Now, on the basis of the stress-driven integral nonlocal model, constitutive relations can be written as
in which \(t_{ij} , T_{ijk} ,\) \(Q_{ij}\) and \(D_{i}\) are nonlocal stress, higher-order nonlocal stress, electric quadrupole, and electric displacement, respectively. Also, \(\overline{x}\) stands for a reference point and \(x\) indicates all points on the domain. Nonzero terms of Eqs. (4) are expressed as
By using the stress-driven integral model formulation one has
where \(t_{xx}\) is nonlocal stress and \(T_{xxz}\) stands for nonlocal higher-order stress. Also, \(\phi\) stands for the kernel function and \(\kappa\) denotes the nonlocal parameter.
It is assumed that the poling direction of the piezoelectric material coincides with z-direction, and the electric field in the z-direction is only taken into account, i.e., [33, 40, 41]
in which \(\varPhi\) denotes the electric potential. Without free electric charges, Gauss’s law obliges that
Based on Eqs. (5c), (5d) and (8) one can arrive at
Now, through inserting Eq. (7) in (9) and by using the electric potential conditions and higher-order electric conditions on the top and bottom surfaces in the following form [31],
the electric potential differential equation can be derived as
Using boundary conditions, Eq. (11) can be solved as
For simplicity, the higher-order nonlocal coupling influence in the previous equation is neglected by \(b_{33} = 0\). Substituting Eq. (12) into (7) leads to [31, 37]
Now, Eqs. (5a) and (5b) can be rewritten as
Hamilton’s principle states that
where the variation of strain energy \(\delta \Pi_{s}\) and variation of external work \(\delta \Pi_{F}\) can be calculated as
Substituting these relations into Hamilton’s principle and setting coefficients of \(\delta w\) to zero results in
with the following corresponding boundary conditions
Also, by using Eqs. (5a), (5b), (6a) and (6b) one has
3 Solution method
For discretizing the derived integral governing equations, the finite difference method (FDM) is employed. In the solution approach, matrix derivative operator of order \(n\) (\({\mathbf{D}}^{\left( n \right)}\)) and matrix integral operator (\({\mathbf{S}}\)) are developed by means of FDM and the trapezoidal integration rule. Also, one can generalize the integral operator to the one-dimensional space as follows:
Spatial domain is considered with constant differences between grid points as
The kernel function is expressed as
where \(x = \left[ {x_{i} } \right] = \left[ {x_{1} ,x_{2} , \ldots ,x_{{n_{x} }} } \right]\) and \(\overline{{x_{i} }} = x_{i}\). Moreover, \(\phi_{i}\) belongs to the \(i\)-th row of matrix. The discretized form of kernel function can be written as
By considering the integral operator in Eq. (20), Eq. (19) can be discretized as
Note that \(\otimes\) and \(\circ\) are used for the Kronecker and Hadamard products. Now by considering
where
the discretized forms of Eqs. (17), (19a) and (19b) considering the definitions of integral operators in Eq. (24) are given as follows:
4 Results and discussion
In this section, after convergence and validation studies, the effects of important parameters including nonlocal parameter, flexoelectric coefficient and parameters of elastic foundation on the static bending of piezoelectric nanobeams under electrical loading are investigated. The piezoelectric nanobeam is constructed from \({\text{BaTiO}}_{3}\). The geometrical properties of nanobeam are assumed as
\(L = 40\,{\text{nm}}\) (length), \(h = 2 \,{\text{nm}}\) (thickness), \(b = h\) (width)
The material properties are also taken as
\(\rho = 7500\frac{{{\text{kg}}}}{{{\text{m}}^{3} }}\) (mass density), \(c_{11} = 131\,{\text{GPa}}\) (elastic stiffness),
\(\mu_{31} = 1 \times 10^{ - 7} \frac{{\text{c}}}{{\text{m}}}\) (flexoelectric coefficient), \(a_{33} = 12.56 \times 10^{ - 9} \frac{{\text{c}}}{{\text{V m}}}\)(dielectric constant)
\(e_{31} = - 4.4\frac{{\text{c}}}{{{\text{m}}^{2} }}\) (piezoelectric coefficient).
Nanoscale beams subject to C-C, SS-SS, C-SS and C-F boundary conditions are studied herein (F: free, SS: simply supported, C: clamped). Also, the dimensionless form of deflection (\(W\)), Winkler and Pasternak parameters (\(K_{w}\), \(K_{p}\)) are defined as
First, in order to check the convergence of developed numerical solution approach, the dimensionless maximum deflections of piezoelectric nanobeams under different boundary conditions are tabulated in Table 1 for various values of grid points. The results of this table are given based on the stress-driven nonlocal model considering various values of nonlocal parameter (\(\kappa /L\)) ranging from 0.01 to 0.05. It is clearly seen that the results tend to converge with increasing \(n_{x}\).
For validation study, a comparison is made between the current results and those given in [19]. In Fig. 2, the dimensionless maximum deflection of C-C and S-S nanobeams is plotted versus the nonlocal parameter based on the stress-driven nonlocal model. Similar comparison is presented in Table 2 in the tabulated form. In Fig. 2 and Table 2, the flexoelectric and piezoelectric effects as well as the influence of elastic foundation are neglected for the purpose of comparison with the results of [19]. To this end, it is considered that \(e_{31} = \mu_{31} = K_{w} = K_{p} = 0\). The comparisons show that there is a good agreement between two sets of results for both boundary conditions. It should be noted that there is a negligible difference between two sets of results in the case of S-S beam, which can be related to different solution approaches in the two works.

Variations of maximum dimensionless deflection of simply supported and clamped nanobeams with the nonlocal parameter (\(K_{w}\)=0, \(K_{p}\)=0, \(\mu_{31}\)=0,\(e_{31} = 0\))
In Fig. 3, the effect of nonlocal parameter on the bending response S-S, C-F, C-S and C-C piezoelectric nanobeams is investigated. The maximum non-dimensional deflection is plotted against \(\kappa /L\) in this figure for two cases: I) with flexoelectric effect II) with flexoelectric and elastic medium effects. The important finding in Fig. 3 is that the stress-driven nonlocal integral model leads to hardening structural responses with increasing nonlocal parameter for all types of end conditions. It should be noted that such a result agrees with the one contributed in the more general mathematical framework of nanobeams modeled by local/nonlocal stress-driven mixtures [44, 45]. Also, it is worth mentioning that the paradox related to cantilever is resolved using the developed stress-driven integral nonlocal model. More clearly, increasing \(\kappa /L\) has a stiffening influence on the behavior of nanobeams.

Effect of nonlocal parameter on the maximum dimensionless deflection of piezoelectric nanobeams (\(K_{w}\)=10, \(K_{p}\)=5, \(\mu_{31} = 10^{ - 7}\))
Figure 4 highlights the effect of flexoelectric coefficient (\(\mu_{31}\)) on the maximum dimensionless deflection of piezoelectric nanobeams under various boundary conditions. The results of this figure are given with and without effect of elastic foundation. It is seen that the elastic medium has a stiffening effect. It is also observed that the deflection of nanobeams decreases as the flexoelectric coefficient gets larger. This is because the rigidity of the piezoelectric nanobeam is increased due to increasing flexoelectric coefficient.

Effect of flexoelectric coefficient on the maximum dimensionless deflection of piezoelectric nanobeams (\(\frac{\kappa }{L} =\) 0.05)
Finally, in Figs. 5 and 6, the effects of Winkler and Pasternak parameters (\(K_{w}\) and \(K_{p}\)) on the maximum dimensionless deflection of nanobeams are indicated, respectively. The figures show that increasing both parameters has a decreasing effect on the deflection. In other words, elastic medium makes the nanobeam more rigid and the maximum deflection decreases. Also, it is found that Pasternak layer has more significant impact on the maximum deflection of flexoelectric nanobeam than the Winkler layer.

Effect of Winkler parameter on the maximum dimensionless deflection of piezoelectric nanobeams (\(\frac{\kappa }{L} =\) 0.05,\(\mu_{31} = 10^{ - 7}\),\(K_{p} = 0\))

Effect of Pasternak parameter on the maximum dimensionless deflection of piezoelectric nanobeams (\(\frac{\kappa }{L} =\) 0.05, \(\mu_{31} = 10^{ - 7}\), \(K_{w} = 0\))
5 Conclusion
In this article, within the framework of nonlocal elasticity theory in its stress-driven integral form, the linear static bending of piezoelectric small-scale beams was analyzed considering the influence of flexoelectricity. The governing equations including nonlocal and flexoelectricity effects were derived using a variational approach on the basis of the Bernoulli–Euler beam theory. Also, an efficient numerical approach was proposed to solve the problem for arbitrary end conditions. In this approach, matrix differential and integral operators were introduced for discretization which were constructed by central FD formulation together with the trapezoidal integration rule. Selected numerical results were finally given to investigate the nonlocal, flexoelectric and Winkler/Pasternak parameters on the bending response of piezoelectric nanobeams. It was indicated that the stress-driven nonlocal integral model leads to hardening structural responses with increasing the nonlocal parameter for all types of end conditions. It was also observed that increasing the flexoelectric coefficient and Winkler-Pasternak parameters leads to the reduction of beam’s deflection.
References
Z.L. Wang, The new field of nanopiezotronics. Mater. Today 10, 20 (2007)
J. Pei, F. Tian, T. Thundat, Glucose biosensor based on the microcantilever. Anal. Chem. 76, 292–297 (2004)
M.E. Gurtin, A.I. Murdoch, A continuum theory of elastic material surfaces. Arch. Rat. Mech. Anal. 57, 291–323 (1975)
M.E. Gurtin, A.I. Murdoch, Surface stress in solids. Int. J. Solids Struct. 14, 431–440 (1978)
R.D. Mindlin, Micro-structure in linear elasticity. Arch. Ration. Mech. Anal. 6, 51–78 (1964)
R.D. Mindlin, H.F. Tiersten, Effects of couple-stresses in linear elasticity. Arch. Ration. Mech. Anal. 11, 415–448 (1962)
W.T. Koiter, Couple stresses in the theory of elasticity. Proceedings of the Koninklijke Nederlandse Akademie van Wetenschappen (B) 67, 17–44 (1964)
A.C. Eringen, Nonlocal polar elastic continua. Int. J. Eng. Sci. 10, 1–16 (1972)
A.C. Eringen, D.G.B. Edelen, On nonlocal elasticity. Int. J. Eng. Sci. 10, 233–248 (1972)
A.C. Eringen, On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 54, 4703–4710 (1983)
B. Arash, Q. Wang, A review on the application of nonlocal elastic models in modeling of carbon nanotubes and graphenes. Comput. Mater. Sci. 51, 303–313 (2012)
N. Challamel, C. Wang, The small length scale effect for a non-local cantilever beam: a paradox solved. Nanotechnology 19, 345703 (2008)
P. Khodabakhshi, J.N. Reddy, A unified integro-differential nonlocal model. Int. J. Eng. Sci. 95, 60–75 (2015)
J. Fernández-Sáez, R. Zaera, J.A. Loya, J.N. Reddy, Bending of Euler-Bernoulli beams using Eringen’s integral formulation: a paradox resolved. Int. J. Eng. Sci. 99, 107–116 (2016)
M. Tuna, M. Kirca, Exact solution of Eringen’s nonlocal integral model for bending of Euler–Bernoulli and Timoshenko beams. Int. J. Eng. Sci. 105, 80–92 (2016)
A. Norouzzadeh, R. Ansari, H. Rouhi, Pre-buckling responses of Timoshenko nanobeams based on the integral and differential models of nonlocal elasticity: an isogeometric approach. Appl. Phys. A 123, 330 (2017)
C.C. Koutsoumaris, K.G. Eptaimeros, G.J. Tsamasphyros, A different approach to Eringen’s nonlocal integral stress model with applications for beams. Int. J. Solids Struct. 112, 222–238 (2017)
X. Zhu, L. Li, Twisting statics of functionally graded nanotubes using Eringen’s nonlocal integral model. Compos. Struct. 78, 87–96 (2017)
G. Romano, R. Barretta, Nonlocal elasticity in nanobeams: the stress-driven integral model. Int. J. Eng. Sci. 115, 14–27 (2017)
G. Romano, R. Barretta, “Stress-driven versus strain-driven nonlocal integral model for elastic nano-beams” Compos. Part B 114, 184–188 (2017)
G. Romano, R. Barretta, M. Diaco, On nonlocal integral models for elastic nano-beams. Int. J. Mech. Sci. 131–132, 490–499 (2017)
G. Romano, R. Barretta, M. Diaco, F. Marotti de Sciarra, Constitutive boundary conditions and paradoxes in nonlocal elastic nano-beams. Int. J. Mech. Sci. 121, 151–156 (2017)
G. Romano, R. Luciano, R. Barretta, M. Diaco, “Nonlocal integral elasticity in nanostructures, mixtures, boundary effects and limit behaviours. Contin. Mech. Thermodyn. 30, 641–655 (2018)
M. Faraji Oskouie, R. Ansari, H. Rouhi, A numerical study on the buckling and vibration of nanobeams based on the strain- and stress-driven nonlocal integral models. Int. J. Comp. Mat. Sci. Eng. 07, 1850016 (2018)
R. Barretta, R. Luciano, F. Marotti de Sciarra, G. Ruta, Stress-driven nonlocal integral model for Timoshenko elastic nano-beams. Eur. J. Mech. / A Solids 72, 275–286 (2018)
M. Faraji Oskouie, R. Ansari, H. Rouhi, Stress-driven nonlocal and strain gradient formulations of Timoshenko nanobeams. Eur. Phys. J. Plus 133, 336 (2018)
M. Faraji Oskouie, R. Ansari, H. Rouhi, Bending of Euler–Bernoulli nanobeams based on the strain-driven and stress-driven nonlocal integral models: a numerical approach. Acta Mech. Sinica 34, 871–882 (2018)
R. Barretta, F. Fabbrocino, R. Luciano, F. Marotti de Sciarra, G. Ruta, Buckling loads of nano-beams in stress-driven nonlocal elasticity. Mech. Adv. Mater. Struct. 27, 869–875 (2020)
M. Roghani, H. Rouhi, Nonlinear stress-driven nonlocal formulation of Timoshenko beams made of FGMs. Mech. Thermodyn Contin (2020). https://doi.org/10.1007/s00161-020-00906-z
Z. Yan, L. Jiang, Size-dependent bending and vibration behaviour of piezoelectric nanobeams due to flexoelectricity. J. Phys. D: Appl. Phys. 46, 355502 (2013)
X. Liang, S. Hu, S. Shen, Size-dependent buckling and vibration behaviors of piezoelectric nanostructures due to flexoelectricity. Smart Mater. Struct. 24, 105012 (2015)
Y.S. Li, P. Ma, W. Wang, Bending, buckling, and free vibration of magnetoelectroelastic nanobeam based on nonlocal theory. J. Intel. Mater. Sys. Struct. 27, 1139–1149 (2016)
Y.M. Yue, K.Y. Xu, T. Chen, A micro scale Timoshenko beam model for piezoelectricity with flexoelectricity and surface effects. Compos. Struct. 136, 278–286 (2016)
Y. Tadi Beni, Size-dependent analysis of piezoelectric nanobeams including electro-mechanical coupling. Mech. Res. Commun. 75, 67–80 (2016)
F. Ebrahimi, M.R. Barati, Surface effects on the vibration behavior of flexoelectric nanobeams based on nonlocal elasticity theory. Eur. Phys. J. Plus 132, 19 (2017)
F. Ebrahimi, M.R. Barati, Magnetic field effects on buckling characteristics of smart flexoelectrically actuated piezoelectric nanobeams based on nonlocal and surface elasticity theories. Microsys. Technol. 24, 2147–2157 (2018)
D.P. Zhang, Y.J. Lei, S. Adhikari, Flexoelectric effect on vibration responses of piezoelectric nanobeams embedded in viscoelastic medium based on nonlocal elasticity theory. Acta Mech. 229, 2379–2392 (2018)
M. Zarepour, S.A.H. Hosseini, A.H. Akbarzadeh, Geometrically nonlinear analysis of timoshenko piezoelectric nanobeams with flexoelectricity effect based on Eringen’s differential model. Appl. Math. Model. 69, 563–582 (2019)
X. Zhao, S. Zheng, Z. Li, Effects of porosity and flexoelectricity on static bending and free vibration of AFG piezoelectric nanobeams. Thin-Walled Struct. 151, 106754 (2020)
G.F. Wang, X.Q. Feng, Effect of surface stresses on the vibration and buckling of piezoelectric nanowires. EPL 91, 56007 (2010)
K.F. Wang, B.L. Wang, Surface effects on the buckling of piezoelectric nanobeams. Adv. Mater. Res. 486, 519–523 (2012)
M. Malikan, V.A. Eremeyev, On the dynamics of a visco–piezo–flexoelectric nanobeam. Symmetry 12, 643 (2020)
M. Malikan, N.S. Uglov, V.A. Eremeyev, On instabilities and post-buckling of piezomagnetic and flexomagnetic nanostructures. Int. J. Eng. Sci. 157, 103395 (2020)
R. Barretta, A. Caporale, S.A. Faghidian, R. Luciano, F. Marotti de Sciarra, C.A. Medaglia, A stress-driven local-nonlocal mixture model for Timoshenko nano-beams. Compos. Part B 164, 590–598 (2019)
R. Barretta, F. Fabbrocino, R. Luciano, F. Marotti de Sciarra, Closed-form solutions in stress-driven two-phase integral elasticity for bending of functionally graded nano-beams. Phys. E. 97, 13–30 (2018)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ansari, R., Faraji Oskouie, M., Nesarhosseini, S. et al. Flexoelectricity effect on the size-dependent bending of piezoelectric nanobeams resting on elastic foundation. Appl. Phys. A 127, 518 (2021). https://doi.org/10.1007/s00339-021-04654-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00339-021-04654-y