
Abstract
We present a geometric variational discretization of nonlinear elasticity in 2D and 3D in the Lagrangian description. A main step in our construction is the definition of discrete deformation gradients and discrete Cauchy–Green deformation tensors, which allows for the development of a general discrete geometric setting for frame indifferent isotropic hyperelastic models. The resulting discrete framework is in perfect adequacy with the multisymplectic discretization of fluids proposed earlier by the authors. Thanks to the unified discrete setting, a geometric variational discretization can be developed for the coupled dynamics of a fluid impacting and flowing on the surface of an hyperelastic body. The variational treatment allows for a natural inclusion of incompressibility and impenetrability constraints via appropriate penalty terms. We test the resulting integrators in 2D and 3D with the case of a barotropic fluid flowing on incompressible rubber-like nonlinear models.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
We present a discrete variational formulation of hyperelasticity in the Lagrangian description. This formulation is associated to the multisymplectic geometric formulation of continuum mechanics which underlies both fluid dynamics and nonlinear elasticity. From the discrete variational setting, a structure preserving numerical integrator is derived for hyperelastic solids, which is spacetime multisymplectic, symplectic in time, preserves exactly the momenta associated to symmetries, and nearly preserves total energy. Thanks to its variational character, the numerical scheme can naturally incorporate incompressibility constraints. Being in perfect adequacy with the multisymplectic discretization of fluids proposed earlier in Demoures and Gay-Balmaz (2021), the discrete framework can be extended to treat fluid-structure interaction dynamics by the inclusion of appropriate impenetrability constraints in the variational formulation.
The developments in this paper are founded on the multisymplectic geometric formulation of continuum mechanics, which is the spacetime version of the symplectic formulation of classical mechanics. This geometric setting allows to intrinsically formulate the multisymplectic form formula and the covariant Noether theorem, which are the field theoretic analogue to the symplecticity of the flow and to the conservation of momentum maps in classical mechanics. The more usual infinite dimensional dynamical system formulation of continuum mechanics is recovered by space and time splitting, which also has a discrete analogue.
Among the main concepts in this paper are the discrete deformation gradients, the discrete Cauchy–Green deformation tensors, and the discrete Jacobians. These objects, directly defined from the spacetime discrete configuration map of the body, allow a systematic treatment of various models of hyperelasticity via the appropriate definition of the discrete stored energy functions. The discrete variational geometric setting also systematically guides the choice of the appropriate degree of freedom of the discrete objects, for instance, at each spatial node there is one discrete Cauchy–Green tensor associated to each of the cells sharing this node. One advantage of the discrete variational framework is the possibility to include equality and inequality constraints via appropriate modification of the discrete action functional. This is developed in this paper for the treatment of fluid–structure interaction involving a barotropic fluid and an incompressible rubber-like solid. Such a coupling can be realized thanks to the unified geometric framework underlying both the solid and fluid components.
Geometric methods for discrete elasticity have been the subject of various developments. We can mention (Ariza and Ortiz 2005) concerning crystal elasticity discretization, where the discrete notions of stress and strain in lattices are introduced, and Yavari (2008), Angoshtari and Yavari (2013), concerning geometric discretization of elasticity from the point of view of discrete exterior calculus.
Several points of view have been developed to treat fluid–structure interaction problems, see (van Loon et al. 2007), Lefrançois and Boufflet (2010), Hou et al. (2012) for the comparison of various fluid–structure interaction methods. We can mention the immersed boundary method (see (Peskin and McQueen 1989), Peskin (2002)) where the interactions between the solid boundaries and the fluid are taken into account by means of local body forces, and the fictitious domain method (see (Glowinski et al. 1997)) where Lagrange multipliers are used instead of calculating the interaction forces. Other point of views to couple fluids and elastic bodies can be obtained, for example, via the arbitrary Lagrangian Eulerian method, see (Hirt et al. 1997), techniques based on the inverse motion function, see (Cottet et al. 2008) and Kamrin et al. (2012), or the smoothed particle hydrodynamics method, see (Khayyer et al. 2018), and references therein.
Our approach is based on the geometric formulation of continuum mechanics seen as a particular classical field theory, see (Gotay et al. 1997) and Marsden et al. (2001). The discrete formulation we develop follows the variational multisymplectic discretization initially developed in Marsden et al. (1998); Lew et al. (2003). Such an approach has been exploited for instance towards its application to Lie group valued field theories for the treatment of geometrically exact (Cosserat) rods (Demoures et al. 2014b, a) and towards its application to nonsmooth mechanics (Demoures et al. 2016, 2017).
The organization of the paper is as follows. Section 2 summarizes briefly the Lagrangian variational setting for elasticity on the continuous side. The elements of the constitutive continuous theory of elasticity necessary for our development are described in rather general terms. Some aspects of the geometric formulation of field theory are also given, including the Noether theorem. In Sects. 3 and 4 we describe, in 2D and 3D, the discrete variational setting for elasticity. We define the discrete deformation gradients, the discrete Cauchy–Green deformation tensors, as well as the discrete Jacobians, in a parallel way with the continuous setting. Based on these definitions, a discrete Lagrangian is constructed for frame indifferent isotropic materials. It is then shown how this approach can be naturally coupled with the variational discretization of barotropic fluids thanks to the introduction of appropriate penalty functions associated to the impenetrability constraints. Illustrative numerical examples are given in 2D and 3D for a barotropic fluid flowing into an hyperelastic container described with the St. Venant–Kirchhoff or the Mooney–Rivlin model. A convergence test is presented with the method of manufactured solutions.
2 Elasticity and Field Theory
In this section we briefly review the variational geometric setting for elasticity in the Lagrangian (or material) description by focusing on isotropic hyperelastic materials. The description is given in terms of the (right) Cauchy–Green tensor, which plays a central role in this paper. The formulation is then recasted in a multisymplectic variational setting, which allows to formulate intrinsically the Hamilton principle, the multisymplectic property of the solutions, and the covariant Noether theorem associated to symmetries. This gives the geometric framework to be discretized in a structure preserving way later.
2.1 Description of Hyperelastic Bodies
We assume that the elastic body is represented by a compact manifold \( {\mathcal {B}} \subset {\mathbb {R}} ^3\) with piecewise smooth boundary, and moves in the ambient space \( {\mathcal {M}} = {\mathbb {R}} ^3\). The motion of the body is described by a time-dependent configuration map \( \varphi : {\mathbb {R}} \times {\mathcal {B}} \rightarrow {\mathcal {M}} \) which indicates the location \(m= \varphi (t,X) \in {\mathcal {M}}\) at time t of the material point \(X \in {\mathcal {B}} \). The deformation gradient is denoted \( {\mathbf {F}} (t,X)= \nabla \varphi (t,X)\), given in coordinates by \( {\mathbf {F}} ^a{}_i= \varphi ^a{}_{,i}\), with \(X^i\), \(i=1,2,3\) the Cartesian coordinates on \( {\mathcal {B}} \) and \(m^a\), \(a=1,2,3\) the Cartesian coordinates on \( {\mathcal {M}} \). We assume that the configuration map is regular enough so that all the computations below are valid.
A material is called hyperelastic if there is a stored energy function \({\mathcal {W}}\) depending on the points \(X \in {\mathcal {B}}\) and the gradient deformation \({\mathbf {F}}(t,X)\) such that the first Piola–Kirchhoff stress tensor of the body in the configuration \( \varphi (t,X)\) is \({\mathbf {P}}= \rho _0 \frac{\partial {\mathcal {W}}}{\partial {\mathbf {F}} }\), where \( \rho _0\) is the mass density of the body in the Lagrangian description. Given Riemannian metrics \( {\mathbf {G}} \) and \({\mathbf {g}}\) on \( {\mathcal {B}} \) and \( {\mathcal {M}} \), the stored energy function of an hyperelastic material with configuration map \( \varphi : {\mathcal {B}} \rightarrow {\mathcal {M}} \) (at some fixed time) takes the general form
This expression of the stored energy function explicitly written in terms of Riemannian metrics allows to naturally reformulate the axiom of material frame indifference and the isotropic property as invariances of \( {\mathcal {W}}\) with respect to spatial and material diffeomorphisms, i.e., diffeomorphisms of \({\mathcal {M}} \) and \( {\mathcal {B}} \), Marsden and Hughes (1983).
From the axiom of material frame indifference the stored energy function depends on the deformation gradient only through the Cauchy–Green deformation tensor defined by
i.e., we have \({\mathcal {W}}( X,{\mathbf {F}} (X), {\mathbf {G}}(X),{\mathbf {g}}( \varphi (X))) = W(X,{\mathbf {G}}(X),{\mathbf {C}}(X))\), for some function W, where \(\varphi ^*\) denotes the pull-back of a tensor field by \( \varphi \).
The material (or Lagrangian) strain tensor \({\mathbf {E}}\) and the second Piola–Kirchhoff stress tensor \({\mathbf {S}}\) are defined respectively by
The elasticity tensor on the reference configuration is defined by
For simplicity, we will consider the Euclidean case, where \({\mathbf {G}} _{ij} =\delta _{ij}\) and \({\mathbf {g}}_{ab} =\delta _{ab}\) in Cartesian coordinates, in which case we can write
where \(\langle \cdot , \cdot \rangle \) denotes the Euclidean inner product on \({\mathbb {R}}^n\).
2.2 Euler–Lagrange Equations for an Hyperelastic Body
The Lagrangian density of an hyperelastic body evaluated on a configuration map \( \varphi (t,X)\) is
with \( \Pi \) a potential energy term such as the gravitational potential. Note that we didn’t write explicitly the dependence on X and t. Hamilton’s principle reads
for variations \( \delta \varphi \) of the body configuration map with \( \delta \varphi =0\) at \(t=0,T\). It yields the Euler–Lagrange equations
together with the natural boundary conditions
for the allowed variations \( \delta \varphi \) at the boundary, with \( {\mathbf {F}} = \nabla \varphi \). For the Lagrangian (5) we compute
hence the Euler–Lagrange equations (6) for the Lagrangian (5) gives the equations of motion for an hyperelastic body as
In this paper we focus exclusively on the variational formulation and the equations in the material description, see (Gay-Balmaz et al. 2012) for the variational formulation in the Eulerian and convective descriptions and its relation with material frame indifference and material covariance discussed above.
2.3 Isotropic Hyperelastic Materials
A frame indifferent hyperelastic material is isotropic if and only if the stored energy function can be written as \(W(X, {\mathbf {G}} (X), {\mathbf {C}} (X))= \Phi (X, \lambda _1(X), \lambda _2(X), \lambda _3 (X))\), where \( \Phi \) is a symmetric function of the principal stretches \(\lambda _1, \lambda _2, \lambda _3\)Footnote 1. This is equivalent to state that W is a function of the invariants \(I_1\), \(I_2\), \(I_3\) of \({\mathbf {C}}\) defined byFootnote 2
The derivative of the invariants with respect to \({\mathbf {C}}\) are given by
from which the second Piola–Kirchhoff stress tensor (3) reads
We refer to Marsden and Hughes (1983)[Sect. 3.5] for more details.
The Lagrangian density of a frame indifferent isotropic hyperelastic material is therefore
while the equations of motion take the form
Incompressible materials can be treated by inserting the constraint \(I_3=1\) in the Hamilton principle as
where \( \mu \) is a Lagrange multiplier.
Example 2.1
A well-known example of isotropic hyperelastic model is the Moonley–Rivlin model ( Mooney (1940), Rivlin (1948, 1949, 1949b)), which is suitable for the description of certain incompressible rubber-like materials. Its stored energy function is defined by the simple expression
with positive material constants \(C_1,C_2\).
2.4 Multisymplectic Variational Continuum Mechanics
We briefly recall here the geometric variational framework of classical field theory, as it applies to continuum mechanics (fluid and elasticity), see (Marsden et al. 2001) and Lew et al. (2003). In Sects. 3 and 4 we shall carry out a structure preserving discretization of this setting which allows the identification of the notion of discrete multisymplecticity, discrete momentum map, and discrete Noether theorems.
2.4.1 Configuration Bundle, Jet Bundle, and Lagrangian Density
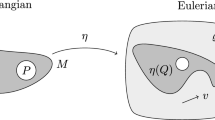
The geometric formulation of classical field theories starts with the identification of the configuration bundle of the theory, denoted \( \pi _{ {\mathcal {Y}} , {\mathcal {X}} }: {\mathcal {Y}} \rightarrow {\mathcal {X}} \). The configuration fields \( \varphi \) of the theory are sections of this fiber bundle, i.e., they are smooth maps \( \varphi : {\mathcal {X}} \rightarrow {\mathcal {Y}} \) such that \( \pi _{ {\mathcal {Y}} , {\mathcal {X}} } \circ \varphi = id_ {\mathcal {X}} \), where \( id_ {\mathcal {X}} \) denotes the identity map on \( {\mathcal {X}} \).
The first jet bundle of the configuration bundle \(\pi _{ {\mathcal {Y}} , {\mathcal {X}} }: {\mathcal {Y}} \rightarrow {\mathcal {X}} \) is the field theoretic analogue of the tangent bundle of classical mechanics. It is defined as the fiber bundle \( \pi _{J^1 {\mathcal {Y}},{\mathcal {Y}} }: J^1 {\mathcal {Y}} \rightarrow {\mathcal {Y}} \) whose fiber at \(y \in {\mathcal {Y}} \) consists of linear maps \(\gamma :T_x {\mathcal {X}} \rightarrow T_y {\mathcal {Y}} \) satisfying \(T \pi _{ {\mathcal {Y}} , {\mathcal {X}} } \circ \gamma = id_{T_x {\mathcal {X}} }\), where \(x= \pi _{ {\mathcal {Y}} , {\mathcal {X}} }(y)\). The derivative of a field \( \varphi \) can be regarded as a section of the fiber bundle \( \pi _{J^1 {\mathcal {Y}} , {\mathcal {X}} }= \pi _{ {\mathcal {Y}} , {\mathcal {X}} } \circ \pi _{J^1 {\mathcal {Y}} , {\mathcal {Y}} }: J^1 {\mathcal {Y}} \rightarrow {\mathcal {X}} \), by considering its first jet extension \( x \in {\mathcal {X}} \rightarrow j^1 \varphi (x)= T_ x \varphi \in J^1_{ \varphi (x)} {\mathcal {Y}} \), with \(T_x \varphi :T_x {\mathcal {X}} \rightarrow T_{ \varphi (x)} {\mathcal {Y}} \) the tangent map of \( \varphi \).
A Lagrangian density is a smooth bundle map \( {\mathcal {L}} : J^1 {\mathcal {Y}} \rightarrow \Lambda ^{n+1} {\mathcal {X}} \) over \( {\mathcal {X}} \), where \( \Lambda ^{n+1} {\mathcal {X}} \rightarrow {\mathcal {X}} \) is the vector bundle of \((n + 1)\)-forms on \( {\mathcal {X}} \), with \( {\text {dim}} {\mathcal {X}} =n+1\). The associated action functional is given by
and the Euler–Lagrange equations follow from the stationary condition for \( \delta S( \varphi )=0\) for appropriate boundary conditions.
For continuum mechanics, the configuration bundle is the trivial fiber bundle
where \( {\mathcal {B}} \) is the reference configuration of the elastic body and \( {\mathcal {M}} \) is the ambient space. We have the variables \(x=(t,X) \in {\mathcal {X}} \) and \(y=(x,m)=(t,X,m) \in {\mathcal {Y}}\). A section of this bundle is a map \( \varphi : {\mathcal {X}} \rightarrow {\mathcal {X}} \times {\mathcal {M}} \), whose first component is \( id_ {\mathcal {X}} \). It is canonically identified with a map \( \varphi : {\mathcal {X}} = {\mathbb {R}} \times {\mathcal {B}} \rightarrow {\mathcal {M}} \) referred to as the elastic body configuration in Sect. 2.1. The first jet extension of \( \varphi \) is \(j^1 \varphi (t,X)= ( \varphi (t,X), {{\dot{\varphi }}} (t,X), \nabla \varphi (t,X))\) and the Lagrangian density reads
2.4.2 Multisymplectic Form Formula and Noether Theorem
A solution \( \varphi \) of the Euler–Lagrange equation associated to \( {\mathcal {L}} :J^1 {\mathcal {Y}} \rightarrow \Lambda ^{n+1} {\mathcal {X}} \) satisfies the multisymplectic form formula given by
for all open subset \(U \subset {\mathcal {X}} \) with piecewise smooth boundary, and for all vector fields V, W solutions of the first variation of the Euler–Lagrange equations at \( \varphi \), see Marsden et al. (1998). In this formula, \( \Omega _ {\mathcal {L}}\) denotes the Cartan \((n+2)\)-form on \(J^1 {\mathcal {Y}} \) associated to \( {\mathcal {L}} \) and \( j ^1 V,j^1W\) are the first jet extension of V, W to \(J^1 {\mathcal {Y}} \), see (Gotay et al. 1997). Property (16) is an extension to field theory of the symplectic property of the solution of the Euler–Lagrange equations of classical mechanics.
Consider the action of a Lie group G on \( {\mathcal {Y}} \), assume that this action covers a diffeomorphism of \( {\mathcal {X}} \), and assume that the Lagrangian density \( {\mathcal {L}} \) is G-equivariant. Then a solution \( \varphi \) of the Euler–Lagrange equation satisfies the covariant Noether theorem
for all open subset \(U \subset {\mathcal {X}} \) with piecewise smooth boundary and for all \( \xi \in {\mathfrak {g}} \), the Lie algebra of G, with \(J^ {\mathcal {L}} :J^1 {\mathcal {Y}} \rightarrow {\mathfrak {g}} ^* \otimes \Lambda ^n J^1 {\mathcal {Y}} \) the covariant momentum map associated to \( {\mathcal {L}} \) and to the Lie group action, see (Gotay et al. 1997) for details.
The properties (16) and (17) admit discrete versions that will be considered later.
3 2D Discrete Fluid—Elastic Body Interactions
In this section we develop a multisymplectic variational discretization of two dimensional hyperelasticity. A main step in our approach is the definition of the discrete Cauchy–Green tensor associated to a discrete configuration map. We then show how this approach can be naturally coupled with the multisymplectic discretization of barotropic fluids. This is finally used for the development of a variational discretization of the coupled dynamics of a barotropic fluid flowing on a hyperelastic body.
3.1 Multisymplectic Discretization and the Discrete Cauchy–Green Tensor
3.1.1 Discrete Lagrangian Setting
Consider the configuration bundle of continuum mechanics \( {\mathcal {Y}} = {\mathcal {X}} \times {\mathcal {M}} \rightarrow {\mathcal {X}} = {\mathbb {R}} \times {\mathcal {B}} \). In this section we assume that \( {\mathcal {B}}\) is a domain in \( {\mathbb {R}} ^2 \) and take \( {\mathcal {M}} = {\mathbb {R}} ^2 \). To discretize the geometric setting, one first considers a discrete parameter space \({\mathcal {U}} _d\) and a discrete base-space configuration, which is a one-to-one map
whose image \( {\mathcal {X}} _d\) is the discrete spacetime. The discrete fields are the sections of the discrete configuration bundle \( \pi _d: {\mathcal {Y}} _d= {\mathcal {X}} _d \times {\mathcal {M}} \rightarrow {\mathcal {X}} _d\), which can be identified with maps \( \varphi _d: {\mathcal {X}} _d \rightarrow {\mathcal {M}} \). The discrete field and the discrete base-space configuration can be simultaneously described by introducing the discrete configuration, which is a map \( \phi _d: {\mathcal {U}} _d \rightarrow {\mathcal {Y}} \). From \(\phi _d\) we obtain the discrete base-space configuration and the discrete field as \( \phi _{ {\mathcal {X}} _d}= \pi _d \circ \phi _d\) and \( \varphi _d= \phi _d \circ \phi _{ {\mathcal {X}} _d}^{-1} \), see Fig. 1.
We choose the discrete parameter space \({\mathcal {U}} _d= \{0,...,j,...,N\} \times {\mathbb {B}}_d\). Here \( \{0,...,j,...,N\}\) describes an increasing sequence of time and \({\mathbb {B}}_d\) encodes the nodes and simplexes of the discretization of \( {\mathcal {B}} \). Assuming for simplicity that \( {\mathcal {B}} \) is a rectangle, we consider \({\mathbb {B}}_d = \{0, \ldots , A\}\times \{0, \ldots , B\}\) and denote \((j,a,b) \in {\mathcal {U}} _d\) the element of the discrete parameter space. The latter determines a set of parallelepipeds, denoted  , defined by the following eight pairs of indices
, defined by the following eight pairs of indices

with \(j= 0, ...,N-1\), \(a=0, ..., A-1\), \(b=0, ..., B-1\), see Fig. 2. We assume that the discrete base-space configuration is of the form
and denote by \( \varphi ^j_{a,b}:= \varphi _d(s^j_{a,b})\) the value of the discrete field at \( s^j_{a,b}\).
Denoting by  the set of all parallelepipeds in the discrete parameter space \( {\mathcal {U}} _d\), we write
the set of all parallelepipeds in the discrete parameter space \( {\mathcal {U}} _d\), we write  and recall that the discrete version of the first jet bundle is given by
and recall that the discrete version of the first jet bundle is given by

Given a discrete field \(\varphi _d \), its first jet extension is the section of (20) defined by

which associates to each parallelepiped, the values of the field at its nodes. Finally, we recall that a discrete Lagrangian is a map
from which the discrete action functional is constructed as


Discrete configuration and discrete configuration bundle

Discrete spacetime domain \({\mathcal {U}}_d\)
3.1.2 Discrete Cauchy–Green Deformation Tensor
Given a discrete base-space configuration \( \phi _{ {\mathcal {X}} _d}\) and a discrete field \( \varphi _d\), the following four vectors \({\mathbf {F}}_{\ell ;a,b}^j \in {\mathbb {R}} ^2\), \(\ell =1,2,3,4\) are defined at each node \((j,a,b)\in {\mathcal {U}}_d\), see Fig. 3 on the right:
Definition 3.1
The discrete deformation gradients of a discrete field \( \varphi _d\) at the parallelepiped  are the four \(2 \times 2\) matrices
are the four \(2 \times 2\) matrices  , \(\ell =1,2,3,4\), defined by
, \(\ell =1,2,3,4\), defined by

Note that the discrete deformation gradients are defined at each of the four nodes of  that are associated to time \(t^j\), see Fig. 3 on the left for the ordering \(\ell =1,2,3,4\) with respect to the nodes. Also, for each
that are associated to time \(t^j\), see Fig. 3 on the left for the ordering \(\ell =1,2,3,4\) with respect to the nodes. Also, for each  , the discrete deformation gradients
, the discrete deformation gradients  , \(\ell =1,2,3,4\), depend on the discrete field \( \varphi _d\) only through its first jet extension
, \(\ell =1,2,3,4\), depend on the discrete field \( \varphi _d\) only through its first jet extension  at the given
at the given  , see (21).
, see (21).
It is assumed that the discrete field \(\varphi _d\) is such that the determinant of the discrete deformation gradient are positive. Using Definition 3.1, the discrete Cauchy–Green deformation tensors can be defined exactly as in the continuous case.
Definition 3.2
The discrete Cauchy–Green deformation tensors of a discrete field \( \varphi _d\) at the parallelepiped  are the four \(2 \times 2\) symmetric matrices
are the four \(2 \times 2\) symmetric matrices


Discrete field \(\phi _d=\varphi _d\circ \phi _{ {\mathcal {X}} _d}\) evaluated on  ,
,  ,
,  ,
,  at time \(t^j\) and the associated vectors \( {\mathbf {F}} _{\ell ;a,b}\), \(\ell =1,2,3,4\)
at time \(t^j\) and the associated vectors \( {\mathbf {F}} _{\ell ;a,b}\), \(\ell =1,2,3,4\)
With the assumption on the discrete field mentioned above, the discrete deformation gradients and the discrete Cauchy–Green deformation tensors are maps

defined on  , with \( {\text {Sym}}_+(2)\) the set of symmetric positive definite \( 2 \times 2\) matrices. By using the definitions (23) and (24), the discrete Cauchy–Green deformation tensors can be explicitly written in terms of the vectors defined in (22) as follows, which is a discrete counterpart of the continuous relation \({\mathbf {C}}_{ij} = \langle \varphi _{,i} , \varphi _{,j} \rangle \).
, with \( {\text {Sym}}_+(2)\) the set of symmetric positive definite \( 2 \times 2\) matrices. By using the definitions (23) and (24), the discrete Cauchy–Green deformation tensors can be explicitly written in terms of the vectors defined in (22) as follows, which is a discrete counterpart of the continuous relation \({\mathbf {C}}_{ij} = \langle \varphi _{,i} , \varphi _{,j} \rangle \).
Proposition 3.3
Given a discrete field \( \varphi _d: {\mathcal {X}}_d \rightarrow {\mathcal {M}} \), the discrete Cauchy–Green deformation tensors are explicitly given as


in terms of the vector \( {\mathbf {F}}^j_{\ell ;a,b}\) defined in (22).
3.1.3 Discrete Jacobian
We recall from Demoures and Gay-Balmaz (2021) that the discrete Jacobian of a discrete field \( \varphi _d\) at the parallelepiped  are the four numbers
are the four numbers  , \(\ell =1,2,3,4\), defined by
, \(\ell =1,2,3,4\), defined by

The discrete Jacobian can be written in terms of the discrete deformation gradient and the discrete Cauchy–Green tensors exactly as in the continuous case, namely, we have the following relations.
Proposition 3.4
The discrete Jacobian is related to the discrete deformation gradients and discrete Cauchy–Green tensors as follows

for each  and all \(\ell =1,2,3,4\).
and all \(\ell =1,2,3,4\).
3.2 Discrete Frame Indifferent Linear Hyperelastic Model
In the 2D case, we shall focus on the St. Venant–Kirchhoff model
where \( \lambda \) and \( \mu \) are the first and second Lamé coefficients and \( {\mathbf {E}}\) is the material strain tensor defined in (2) with \( {\mathbf {G}} _{ij}= \delta _{ij}\). In the last term we rewrote the stored energy function in a vectorial form by introducing the vector \({\mathsf {E}}\) and the symmetric matrix \({\mathsf {C}}\) defined by
with \( \nu =\frac{ \lambda }{ \lambda + 2 \mu } \) the Poisson ratio and \(E=\frac{4 \mu ( \lambda + \mu )}{ \lambda + 2 \mu }\) the Young modulus in 2D.
3.2.1 Discrete Stored Energy Function
The discrete stored energy function \(W_d:J^1 {\mathcal {Y}} _d \rightarrow {\mathbb {R}}\) is defined in terms of the continuous one as follows

with  . For instance, for \(\ell =1\), we have
. For instance, for \(\ell =1\), we have

3.2.2 Discrete Second Piola–Kirchhoff Stress
The discrete second Piola–Kirchhoff stress at time \(t^j\) and spatial position \(\ell \), with the ordering \(\ell = 1\) to \(\ell = 4\), respectively associated to the nodes (j, a, b), \((j,a+1,b)\), \((j,a,b+1)\), \((j,a+1,b+1)\), is defined as

for all  .
.
3.3 2D Barotropic Fluid—Elastic Body Interactions
We describe here the discrete variational setting for the coupled dynamics of a barotropic fluid flowing on a hyperelastic body. The Lagrangian density of a barotropic fluid is of the form
with \( \rho _0^{\mathsf {f}} \) the fluid mass density and \(J= {\text {det}} {\mathbf {F}} = \sqrt{ {\text {det}} {\mathbf {C}} }\), where we assume \( {\mathbf {G}} _{ij}= \delta _{ij}\) and \( g_{ab}= \delta _{ab}\). Here \( W^{\mathsf {f}}( \rho _0^{\mathsf {f}} , J) = w ( \rho _0^{\mathsf {f}} /J)\), with \(w( \rho )\) the specific internal energy barotropic fluid. We recall that Hamilton’s principle yields the barotropic fluid equations in the Lagrangian (or material) description as
with \(P_W( \rho _0 ^{\mathsf {f}} , J)= - \rho _0^{\mathsf {f}} \frac{\partial W^{\mathsf {f}}}{\partial J} ( \rho _0^{\mathsf {f}} ,J)\) the pressure in the material description.
3.3.1 Discrete Lagrangians for the Fluid and the Elastic Body
For the elastic body, we consider discrete Lagrangians of the form

where  is the volume of the parallelepiped
is the volume of the parallelepiped  . For simplicity, we have assume that \( \rho _0^{\mathsf {e}}\) is constant in space. The discrete kinetic energy \(K_d: J^1 {\mathcal {Y}} _d \rightarrow {\mathbb {R}}\) is defined by
. For simplicity, we have assume that \( \rho _0^{\mathsf {e}}\) is constant in space. The discrete kinetic energy \(K_d: J^1 {\mathcal {Y}} _d \rightarrow {\mathbb {R}}\) is defined by

with \({\mathbf {v}}_{\alpha ,\beta }^j= (\varphi _{\alpha ,\beta }^{j+1}- \varphi _{\alpha ,\beta }^j)/\Delta t^j\). The discrete stored energy function \(W_d^{\mathsf {e}}:J^1{\mathcal {Y}}_d \rightarrow {\mathbb {R}}\) is defined by

with \(W^{\mathsf {e}}\) the stored energy function of the hyperelastic body. Finally, the discrete potential energy \(\Pi _d:J^1{\mathcal {Y}}_d \rightarrow {\mathbb {R}}\) is defined by

where \( \Pi \) is the potential energy of the continuous model. We shall focus on the gravitation potential \( \Pi ( \varphi )= \left\langle {\mathbf {g}} , \varphi \right\rangle \), with \( {\mathbf {g}}\) the gravitational acceleration vector.
For the barotropic fluid, we shall consider discrete versions of (32) given in a similar way with the elasticity case (34) by

where now \(W^{\mathsf {f}}_d: J^1 {\mathcal {Y}} _d \rightarrow {\mathbb {R}} \) is the discrete internal energy of the fluid given by

with \(W^{\mathsf {f}}(\varrho _0^{\mathsf {f}}, J)\) the internal energy of the barotropic fluid and  the discrete Jacobians associated to
the discrete Jacobians associated to  . We assumed that \( \rho _0^{\mathsf {f}}\) is constant in space for simplicity.
. We assumed that \( \rho _0^{\mathsf {f}}\) is constant in space for simplicity.
3.3.2 Discrete Action and Variations
To simplify the exposition, we assume that the discrete base space configuration for the elastic body is fixed and given by \( \phi _ { {\mathcal {X}} _d}(j,a,b)= (j \Delta t, a \Delta s_1, b \Delta s_2)\), for given \( \Delta t\), \( \Delta s_1\), \( \Delta s_2\), similarly for the fluid. In this case, we have  in the discrete Lagrangian and the mass of each 2D cell in \(\phi _ { {\mathcal {X}} _d}({\mathbb {B}}_d)\) is \(M^{\mathsf {e}} = \rho _0^{\mathsf {e}} \Delta s_1 \Delta s_2\).
in the discrete Lagrangian and the mass of each 2D cell in \(\phi _ { {\mathcal {X}} _d}({\mathbb {B}}_d)\) is \(M^{\mathsf {e}} = \rho _0^{\mathsf {e}} \Delta s_1 \Delta s_2\).
We consider the discrete action functional

where \({\mathcal {L}}^{\mathsf {e}}_{d}\) and \({\mathcal {L}}^{\mathsf {f}}_{d}\) are the discrete Lagrangians associated to the elastic body and to the fluid. For notational simplicity we have used the same notation \( \varphi _d\) for the both the discrete configuration of the fluid and the elastic body.
Let us denote by \(D_k\), \(k=1,...,8\), the partial derivative of the discrete Lagrangians with respect to the k-th component of  , in the order given in (21). From the discrete Hamilton principle \( \delta S_d( \varphi _d)=0\), we get the discrete Euler–Lagrange equations in the general form
, in the order given in (21). From the discrete Hamilton principle \( \delta S_d( \varphi _d)=0\), we get the discrete Euler–Lagrange equations in the general form
for both \({\mathcal {L}}^{\mathsf {e}}_{d}\) and \({\mathcal {L}}^{\mathsf {f}}_{d}\), where we used the abbreviate notation  . By using the expressions of the discrete Lagrangians given in (34) and (38), the general form (75) yields
. By using the expressions of the discrete Lagrangians given in (34) and (38), the general form (75) yields

\({\mathsf {n}}={\mathsf {e}},{\mathsf {f}}\), see “Appendix A.1” for the derivation, as well as for the definition of the operators \({\mathfrak {D}}_k\), \(k=1,3,5,7\). Note that these are the discrete equations of motion corresponding to (8). In (42), \({\mathbf {S}}_\ell \) is the discrete second Piola–Kirchhoff tensor of the model considered, see (31). For the St. Venant–Kirchhoff model one has \({\mathbf {S}}=2\lambda \mathrm {Tr}( {\mathbf {E}}) {\mathbf {I}} + 4\mu {\mathbf {E}}\) while for the barotropic fluid \({\mathbf {S}}= - P_WJ {\mathbf {C}} ^{-1} \).
Implicit versions of these Euler–Lagrange equations can be derived by considering the appropriate modifications in the definition of the discrete deformation gradients, see Demoures and Gay-Balmaz (2021)[Sect. 3.2.1]. We also refer to that paper for the discrete boundary conditions emerging from the discrete Hamilton principle.
3.3.3 Discrete Multisymplectic Form Formula
By evaluating the differential \( {\mathbf {d}} S_d\) of the discrete action functional, restricted to an arbitrary subdomain \( {\mathcal {U}}_d'\) of \( {\mathcal {U}} _d\), on a solution \( \varphi _d\) of the discrete Euler–Lagrange equation and by taking the exterior derivative of the resulting expression along the first variations of this solution, one obtains a discrete analogue of the multisymplectic form formula (16), see (Marsden et al. 1998) for a detailed treatment. This formula extends to spacetime discretization, the symplectic property of variational time integrators (Marsden and West 2001). It also encodes a discrete version of the reciprocity theorem of continuum mechanics, as well as discrete time symplecticity of the solution, see (Lew et al. 2003). We refer to Demoures and Gay-Balmaz (2021) for application to the case of the barotropic fluid, the case of the elastic body being similar. In the present situation, the solution of the discrete Euler–Lagrange equations (42) satisfies the discrete multisymplectic form formula on each subdomain \( {\mathcal {U}} _d'\) of the discrete spacetime associated to either the fluid motion or the elastic body motion.
3.3.4 Symmetries and Discrete Noether Theorems
Consider the action of the special Euclidean group \(SE(2)\ni ( R_ \theta , u)\) on a discrete field given by \(\varphi _d \mapsto R_ \theta \varphi _d + u \) with \(R_ \theta \) the rotation of angle \( \theta \). The discrete covariant momentum maps \( {\mathcal {J}} ^{\mathsf {p}}_{ {\mathcal {L}} _d}: J^1 {\mathcal {Y}} _d \rightarrow {{\mathfrak {s}}}{{\mathfrak {e}}}(2) ^* \), \({\mathsf {p}}=1,...,8\), associated to the SE(2) action and to a discrete Lagrangian \( {\mathcal {L}} _d: J^1 {\mathcal {Y}} _d \rightarrow {\mathbb {R}} \), are found as

In (43), \(\varphi ^{({\mathsf {p}})}\) is the \({\mathsf {p}}\)-th component of \(j^1 \varphi _d\), see (21), \(D_{\mathsf {p}}\) denotes the partial derivative with respect to the \({\mathsf {p}}\)-th argument of \( {\mathcal {L}} _d\), and  . From the discrete covariant momentum maps (43), the discrete classical momentum map is given by
. From the discrete covariant momentum maps (43), the discrete classical momentum map is given by

with \( \varvec{\varphi } ^j\) the collection of all positions at time \(t^j\), see (Demoures et al. 2014a). For the discrete Lagrangians (34) and (38), we get the expressions

with

similarly for the fluid.
In absence of gravitational potential, the discrete Lagrangians (34) and (38) are SE(2) invariant. Indeed, when \(\varphi _d \mapsto R_ \theta \varphi _d + u \) the associated discrete deformation gradients (23) transform as \( {\mathbf {F}} _\ell \mapsto R_ \theta {\mathbf {F}} _\ell \), so that the discrete Cauchy–Green deformation tensors (24) and the discrete Jacobians (27) are SE(2)-invariant. The discrete covariant Noether theorem for the discrete covariant momentum maps \( {\mathcal {J}} ^{\mathsf {p}}_{ {\mathcal {L}} _d}\), given as

thus holds on arbitrary subdomain \({\mathcal {U}} _d'\) of the discrete spacetime associated to either the fluid motion or the elastic body motion. Furthermore, the classical discrete Noether theorem holds for the discrete classical momentum map (79) as
for all \(t^j\).
When the gravitational potential is taken into account, only the component of the discrete momentum maps associated to horizontal translations satisfies the discrete Noether theorems above.
3.3.5 Incompressibility and Impenetrability Conditions
The constraints will be included in the discrete variational formulation by the addition of appropriate penalty terms.
The first constraint is the incompressibility of the elastic body which is imposed via the condition  , for all
, for all  and all \(\ell =1,2,3,4\), which mimics the properties of rubber. The associated quadratic penalty function is given by
and all \(\ell =1,2,3,4\), which mimics the properties of rubber. The associated quadratic penalty function is given by

where r is the penalty parameter.
The second constraint is the impenetrability condition between the fluid node \(\varphi _{c,d}^j\) flowing above the elastic body nodes \(\varphi _{a,b}^j\), \(\varphi _{a+1,b}^j\), which is defined as follows
where \(\mathrm {R}_{\pi /2}\) is a rotation of \(+\pi /2\). In this expression \(\mathrm {R}_{\pi /2} (\varphi _{a+1,b}^j -\varphi _{a,b}^j) \) represents the outward pointing normal vector to the body. See, e.g., Cirak and West (2005) for the use of such constraint functions in impact problems. The function \( \Psi _{\mathrm{im}}\) in (47) is evaluated on all the boundary nodes \(\varphi _{c,d}^j\) of the fluid and on the two boundary nodes of the elastic body that are the closest to \( \varphi _{c,d}^j\). The associated quadratic penalty term is given by
with \(K \in \; ]0, \infty [\;\) if \(\Phi _{\mathrm{im}}(\varphi _{a,b}^j, \varphi _{a+1,b}^j, \varphi _{c,d}^j)\le 0\) and \(K=0\) if \(\Phi _\mathrm{im}(\varphi _{a,b}^j, \varphi _{a+1,b}^j, \varphi _{c,d}^j)>0\). The derivatives of \(\Phi _{\mathrm{im}}\) with respect to the nodes \(\varphi _{a,b}^j, \varphi _{a+1,b}^j, \varphi _{c,d}^j\) are given by
which express the directions of the reactions forces.
The resulting discrete action functional is found as

where \(S_d\) is associated to the discrete Lagrangians of the fluid and the elastic body, see (40). In the third term the second sum is taken over the boundary nodes of the fluid and, given such a boundary node \( \varphi _{c,d}^j\), the nodes \( \varphi _{a,b}^j, \varphi _{a+1,b}^j\) are chosen as explained above. For the boundary nodes \( \varphi _{c,d}^j\) that are not in contact, the corresponding term vanishes by definition of \(\Phi _{\mathrm{im}}\). Away from the interface between the barotropic fluid and the elastic body, the boundary nodes are subject to the ambient pressure. This boundary condition directly arises from the variations of \(S_d\) as explained below. Parts of the boundary of the body can also be prescribed, see below.
In order to avoid the possible instabilities related to the presence of a large penalty parameter, one could use the methods of augmented Lagrangians, in which both a Lagrange multiplier term and a penalty term are used, see (Rockafellar 1993). From a practical point of view, see (Nocedal and Wright 2006), this approach is however much more expensive as it needs to determine the Lagrange multiplier at each contact point.
3.4 Barotropic Fluid Flowing Over a St. Venant–Kirchhoff Hyperelastic Container
We consider an incompressible elastic body with stored energy given by the St. Venant–Kirchhoff model (29) and a compressible barotropic fluid described by the Tait equation
We shall use the expression (51) for the treatment of an isentropic perfect fluid, where the value of the constant \(B\ne 0\) does not affect the dynamics, while it allows to naturally impose the boundary condition \(P|_{ \partial {\mathcal {B}} }=B\), with \(P=A \left( \frac{\rho _0}{J} \right) ^ \gamma \) and B the external pressure. This is crucial for the discretization, since it allows to find the appropriate discretization of the boundary condition directly from the boundary terms of the discrete variational principle, see (Demoures and Gay-Balmaz 2021).
The barotropic fluid is subject to gravity and is flowing without friction inside an elastic container. In this case, see Fig. 4, the impenetrability constraints take the following form along the three edges

Elastic body and fluid configurations respectively in nodes \(\varphi _{a,b}^j\), \(\varphi _{a+1,b}^j\), \(\varphi _{a,b+1}^j\), and \(\varphi _{c,d}^j\) at time \(t^j\)
The integrator is found by computing the criticality condition for the discrete action functional (50) with incompressibility and impenetrability penalty terms given in (46) and (48). We simulate the following situation:
-
1.
The barotropic fluid has the properties \(\rho _0= 997 \, \mathrm {kg/m}^3\), \(\gamma =6 \), \(A = {\tilde{A}} \rho _0^{-\gamma }\) with \({{\tilde{A}}} = 3.041\times 10^4\) Pa, and \(B = 3.0397\times 10^4\) Pa. The size of the discrete reference configuration at time \(t^0\) is \(0.5\mathrm {m} \times 0.15 \mathrm {m}\), with space-steps \(\Delta s_1=0.025\), \(\Delta s_2= 0.015\)m.
-
2.
The hyperelastic St. Venant–Kirchhoff model has the properties \(\rho _0= 945 \, \mathrm {kg/m}^3\), Poisson ratio \(\nu = 0.4999\), and Young modulus \(E = 4.5\times 10^6\). The incompressibility parameter is \(r=10^4\) and the space-steps are \(\Delta s_1=0.02\), \(\Delta s_2= 0.0125\)m.
-
3.
The two corners at the bottom of the hyperelastic body are fixed.
-
4.
The time-step is \(\Delta t=10^{-4}\) and the test is carried out for 0.4s. After this time, the impact between the fluid and the obstacle requires taking into account the physical phenomena of breaking waves.
The results are reproduced in Figs. 5 and 6, which also show the evolution of the total momentum maps (fluid+solid), the relative total energy behavior (fluid+solid), and the norm of the resultant of forces acting on the right and on the left of the fluid. We used the notation \({\mathbf {J}}_d=({\mathsf {J}}_1,{\mathsf {J}}_2, {\mathsf {J}}_3) \in {{\mathfrak {s}}}{{\mathfrak {e}}}(2)^*\) for the angular, horizontal, and vertical component, respectively. Note that only the component \({\mathsf {J}}_2\) corresponds to a symmetry of the discrete Lagrangian in presence of gravity. Its conservation is however broken, even before the fluid impacts the elastic body, see Fig. 5, due to the fixing of the two corners at the bottom of the hyperelastic body. Its exact conservation in Fig. 6 is due to the symmetric character of the initial configuration. The graph of the resultant force also illustrates the times of impact of the fluid on the right and left parts of the hyperelastic container.

Top to bottom on the left: Configuration after 0.01s, 0.1s, 0.15s, 0.35s, 0.4s. Top to bottom on the right: Evolution of momentum maps, relative energy, and norm of the resultant of forces acting on the right and on the left of the fluid, associated respectively to pressures  &
&  and
and  &
&  during 0.4s
during 0.4s

Top to bottom on the left: Configuration after 0.01s, 0.15s, 0.25s, 0.35s, 0.4s. Top to bottom on the right: Evolution of momentum maps, relative energy, and norm of the resultant of forces acting on the right and on the left of the fluid, associated respectively to pressures  &
&  and
and  &
&  during 0.5s
during 0.5s
The forces acting on the right at the spacetime nodes \((j,C-1,d)\), \(d=1,...,D-1\), of the fluid associated to pressures  &
&  are given by
are given by

see “Appendix A.2” in Demoures and Gay-Balmaz (2021) for details. Similarly, the forces acting on the left at the spacetime nodes (j, 0, d), \(d=1,...,D-1\), of the fluid associated to pressures  are
are

3.5 Convergence Tests
We test the convergence of our scheme for the fluid and the solid via the method of manufactured solutions.
3.5.1 Barotropic Fluid
We consider the barotropic fluid equations (33) with internal energy given in (51) and potential energy \( \Pi ( \varphi )= \left\langle {\mathbf {g}} , \varphi \right\rangle \). We recall that \(P_W= A \left( \frac{ \rho _0}{J} \right) ^ \gamma -B\) and that the boundary condition is \(P_W|_{ \partial {\mathcal {B}} }=0\), or, equivalently,
On the reference configuration space \( {\mathcal {B}} = [0,1] \times [0,1]\) we manufactured an analytic solution \( \varphi ^*= ( \varphi ^1 , \varphi ^2 )\) given by
by adding forcing terms \(f^*=(f^1, f^2)\) on the right-hand side of (33). These forces are explicitly given by
with \( \varphi ^1 \), \( \varphi ^2 \) given by (54) and where we assume that \( \rho _0\) is a constant.
Note that at \(t=0\) we have
The Jacobian of the manufactured solution satisfies \( J(t,0,y)=J(t,1,y)= J(t,x,0)= J(t,x,1)=1\), therefore \( \varphi ^* \) verifies \(P_W|_{ \partial {\mathcal {B}} }= A \rho _0^ \gamma -B\) on the boundary for all t. Hence, by choosing the constants \(A, B, \rho _0\) such that \(B= A \rho _0^ \gamma \), the manufactured solution (54) satisfies the boundary condition (53) at all times.
We numerically solved (42) with the forcing \(f^*=(f^1,f^2)\) and with the properties \(\rho _0= 10^3 \, \mathrm {kg/m}^2\), \(\gamma =6 \), and \(A = {\tilde{A}} \rho _0^{-\gamma }\) with \({{\tilde{A}}} = B= 3.041\times 10^4\) Pa. The size of the reference configuration at time \(t^0\) is \(1 \, \mathrm {m} \times 1 \, \mathrm {m}\). In (54) the coefficients have the following values \(E_1 = 10^{-3}\), \(E_2 = 10^{-3}\), \(E_3 = 10^{-2}\), \(E_4 = 10^{-3}\), \(V_1 = 2\times 10^{-4}\), \(V_2 = 10^{-5}\), and \(\delta = \pi /4\).
We consider a fixed time-step \(\Delta t= 10^{-4}\) and we impose the initial positions \(\varphi _{a,b}^j\) at times \(t^0\) and \(t^1\) to be given by the expression (54). For each space-step \(\Delta s_1=\Delta s_2\) \(\in \{ 1/4, \, 1/8,\, 1/16,\, 1/32 , \, 1/64 \}\), we calculate the positions \( \varphi _d\) through the forced multisymplectic integrator and measure the \(L^2\)-error
at time \(t^N=0.1\)s with respect to the exact solution \( \varphi ^* \) in (54). We get the following convergence with respect to \(\Delta s_1=\Delta s_2\)
\(\Delta s_1=\Delta s_2 \) | 1/4 | 1/8 | 1/16 | 1/32 | 1/64 |
|---|---|---|---|---|---|
\(\Vert \varphi _d - \varphi ^* \Vert _{L^2}\) | 0.2658 | 0.1022 | 0.0494 | 0.0208 | 0.0106 |
\( \text {rate} \) | 1.138 | 1.058 | 1.22 | 0.97 |

Configuration of the barotropic fluid after 0.1s when \(\Delta s_1=\Delta s_2 = 1/4, \, 1/16, \, 1/32, \, 1/64\)
3.5.2 Hyperelastic Solid
We consider the equations for a St. Venant–Kirchhoff hyperelastic body given in (8) with stored energy function (29) and potential energy \( \Pi ( \varphi )= \left\langle {\mathbf {g}} , \varphi \right\rangle \). We recall that the second Piola–Kirchhoff stress tensor is
and the boundary condition read \({\mathbf {S}} \cdot {\mathbf {n}} |_{ \partial {\mathcal {B}} }=0\).
On the reference configuration space \( {\mathcal {B}} = [0,1] \times [0,1]\) we manufactured an analytic solution \( \varphi ^*= ( \varphi ^1 , \varphi ^2 )\) given by
by adding forcing terms \(f^*=(f^1, f^2)\) on the right-hand side of (8). Assuming that \( \rho _0\) is a constant, these forces are explicitly given by
with \( \varphi ^1 \), \( \varphi ^2 \) given by (58) and with \( E_{ij}\) the components of the material strain tensor \({\mathbf {E}}= \frac{1}{2} ( {\mathbf {C}} - {\mathbf {I}})\):
The boundary condition \({\mathbf {S}} \cdot {\mathbf {n}} |_{ \partial {\mathcal {B}} }=0\) reads
where the outward pointing unit normal vector field to the boundary of the body is given by
A direct computation shows that if the coefficients \(\lambda \) and \(\mu \) in (58) satisfy
for \(k, k' \in {\mathbb {Z}} \), the manufactured solution \( \varphi ^* \) satisfies the boundary condition at all times.
We numerically solved (42) with the forcing \(f^*=(f^1,f^2)\) and with mass density \(\rho _0= 945 \, \mathrm {kg/m}^2\), Young modulus \(E=2.5\times 10^4\), and Poisson ratio \(\nu =0.4999\), where we recall the relations \(\lambda =\frac{E \nu }{ (1-\nu )(1+\nu ) }, \quad \mu =\frac{ E }{ 2(1+\nu ) }\). The size of the reference configuration at time \(t^0\) is \(1 \, \mathrm {m} \times 1 \, \mathrm {m}\). In (58) the coefficients have the following values \(E_1 = 10^{-3}\), \(E_2 = 2\times 10^{-3}\), \(E_3 = 2\times 10^{-2}\), \(E_4 = 10^{-3}\), \(V_1 = 3\times 10^{-2}\), \(V_2 = 10^{-3}\), and \(\delta = \pi /4\).
As before, we consider a fixed time-step \(\Delta t= 10^{-4}\) and we impose the initial positions \(\varphi _{a,b}^j\) at times \(t^0\) and \(t^1\) to be given by the expression (58). For each space-step \(\Delta s_1=\Delta s_2\) \(\in \{ 1/4, \, 1/8,\, 1/16,\, 1/32 , \, 1/64 \}\), we calculate the positions \( \varphi _d\) through the forced multisymplectic integrator and measure the \(L^2\)-error (57) at time \(t^N=0.1\)s with respect to the exact solution \( \varphi ^* \) in (58). We get the following convergence with respect to \(\Delta s_1=\Delta s_2\)
\(\Delta s_1=\Delta s_2 \) | 1/4 | 1/8 | 1/16 | 1/32 | 1/64 |
|---|---|---|---|---|---|
\(\Vert \varphi _d - \varphi ^* \Vert _{L^2}\) | 0.0794 | 0.168 | 0.0045 | 0.0011 | 0.00058 |
\( \text {rate} \) | 2.24 | 1.9 | 2.03 | 0.92 |
4 3D Discrete Fluid—Elastic Body Interactions

Configuration of the hyperelastic solid after 0.1s when \(\Delta s_1=\Delta s_2 = 1/4, \, 1/16, \, 1/32, \, 1/64\)
In this section we show how the setting developed previously can be extended to the three dimensional case. The main step is to find an appropriate definition of the 3D discrete deformation gradients.
4.1 3D Discrete Setting and the Discrete Cauchy–Green Tensor
4.1.1 Discrete Lagrangian Setting
With \( {\mathcal {B}} \) a domain in \( {\mathbb {R}} ^3 \) with piecewise smooth boundary and \( {\mathcal {M}} ={\mathbb {R}} ^3 \), the discrete configuration bundle is defined as in the 2D case, see the beginning of Sect. 3.1 and Fig. 1. The discrete parameter space is now \({\mathcal {U}}_d= \{0,...,j,...,N\} \times {\mathbb {B}}_d\), where we consider \( {\mathbb {B}}_d=\{0,...,A\} \times \{0,...,B\} \times \{0,..., C\}\) and we denote \((j,a,b,c) \in {\mathcal {U}} _d\). It determines a set  of parallelepipeds denoted
of parallelepipeds denoted  , defined by 16 pairs of indices, see Fig. 9 for the eight pairs of indices in
, defined by 16 pairs of indices, see Fig. 9 for the eight pairs of indices in  at time \(t^j\). We assume that the discrete base-space configuration is of the form
at time \(t^j\). We assume that the discrete base-space configuration is of the form
and denote by \( \varphi ^j_{a,b,c}:= \varphi _d(s^j_{a,b,c})\) the value of the discrete field at \( s^j_{a,b,c}\). The discrete first jet bundle and discrete first jet extensions are defined as in the 2D case earlier. In particular, we write the first jet extension as follows


Discrete field \(\phi _d=\varphi _d\circ \phi _{ {\mathcal {X}} _d}\) evaluated on  at time \(t^j\)
at time \(t^j\)
4.1.2 Discrete Cauchy–Green Deformation Tensor in 3D
Given a discrete base-space configuration \( \phi _{ {\mathcal {X}} _d}\) and a discrete field \( \varphi _d\), the following six vectors \({\mathbf {F}}_{\ell ;a,b,c}^j \in {\mathbb {R}} ^3\), \(\ell =1,...,6\) are defined at each node \((j,a,b,c)\in {\mathcal {U}}_d\), see Fig. 9 on the right:
Definition 4.1
The discrete deformation gradients of a discrete field \( \varphi _d\) at the parallelepiped  are the eight \(3 \times 3\) matrices
are the eight \(3 \times 3\) matrices  , \(\ell =1,...,8\), defined by
, \(\ell =1,...,8\), defined by

We note that the discrete deformation gradients are defined at each of the eight nodes of  that are associated to time \(t^j\). We assume that the determinant of these matrices is always positive. The ordering \(\ell =1\) to \(\ell =8\) is respectively associated to the nodes (a, b, c), \((a+1,b,c)\), \((a,b+1,c)\), \((a,b,c+1)\), \((a+1,b+1,c)\), \((a,b+1,c+1)\), \((a+1,b,c+1)\), \((a+1,b+1,c+1)\) see Fig. 9 on the left. Note that with this concept of discrete deformation gradient, one can consider the right and left polar decompositions \( {\mathbf {F}} = {\mathbf {R}} {\mathbf {U}}= {\mathbf {V}} {\mathbf {R}} \) exactly as in the continuous case.
that are associated to time \(t^j\). We assume that the determinant of these matrices is always positive. The ordering \(\ell =1\) to \(\ell =8\) is respectively associated to the nodes (a, b, c), \((a+1,b,c)\), \((a,b+1,c)\), \((a,b,c+1)\), \((a+1,b+1,c)\), \((a,b+1,c+1)\), \((a+1,b,c+1)\), \((a+1,b+1,c+1)\) see Fig. 9 on the left. Note that with this concept of discrete deformation gradient, one can consider the right and left polar decompositions \( {\mathbf {F}} = {\mathbf {R}} {\mathbf {U}}= {\mathbf {V}} {\mathbf {R}} \) exactly as in the continuous case.
Definition 4.2
The 3D discrete Cauchy–Green deformation tensors of a discrete field \( \varphi _d\) at the parallelepiped  are the eight \(3 \times 3\) symmetric matrices
are the eight \(3 \times 3\) symmetric matrices

As in Proposition 3.3, we have following result.
Proposition 4.3
Given a discrete field \( \varphi _d: {\mathcal {X}}_d \rightarrow {\mathcal {M}} \), the 3D discrete Cauchy–Green deformation tensor associated to  at the node (a, b, c) at time \(t^j\), for \(\ell =1\), is
at the node (a, b, c) at time \(t^j\), for \(\ell =1\), is

See “Appendix A.3” for the discrete Cauchy–Green deformation tensor at the nodes \((a+1,b,c)\), \((a,b+1,c)\), \((a,b,c+1)\), \((a+1,b+1,c)\), \((a,b+1,c+1)\), \((a+1,b,c+1)\), \((a+1,b+1,c+1)\).
4.1.3 Discrete Jacobian
The 3D discrete Jacobian of \( \varphi _d\) associated to  at the node (j, a, b, c) is defined by
at the node (j, a, b, c) is defined by

We refer to “Appendix A.2” for the expression of the 3D discrete Jacobians at the other nodes. The relations with the 3D discrete deformation gradients and discrete Cauchy–Green tensors hold exactly as in the 2D case in Proposition 3.4.
4.2 Discrete Frame Indifferent and Isotropic Nonlinear Hyperelastic Models
4.2.1 Invariants of the discrete Cauchy–Green Deformation Tensor
Our definition of the discrete Cauchy–Green deformation tensor as a symmetric matrix allows the definition of its invariants exactly as in the continuous case. Note that in the discrete case each node has several associated discrete Cauchy–Green deformation tensors, namely, one for each parallelepiped sharing this node. This follows directly from the discrete field theoretic Lagrangian setting that we follow. We have the following expressions.
Definition 4.4
The invariants of the symmetric matrix  , \(\ell =1,...,8\), are defined by
, \(\ell =1,...,8\), are defined by

For each fixed  , these invariants depend only of the first jet extension
, these invariants depend only of the first jet extension  of the discrete field at the given
of the discrete field at the given  . Recall that these invariants are related to the coefficients in the characteristic polynomial \(P(\nu )\) of the \(3\times 3\) symmetric matrix
. Recall that these invariants are related to the coefficients in the characteristic polynomial \(P(\nu )\) of the \(3\times 3\) symmetric matrix  as follows
as follows

In particular, the eigenvalues \(\nu _1, \nu _2, \nu _3\) are defined at each node with respect to each of the eight neighbouring parallelepipeds. For each  and \(\ell =1,...,8\), we have
and \(\ell =1,...,8\), we have

and \(\nu _1=\lambda _1^2\), \(\nu _2=\lambda _2^2\), \(\nu _3=\lambda _3^2\), with \(\lambda _1\), \(\lambda _2\), \(\lambda _3\) the discrete principal stretches. At each node, there are thus several classes of discrete principal stretches, namely, one for each parallelepiped sharing this nodes. We can also recall the following standard result, which holds here in the discrete case and can be regarded as a discrete analogue of the characterization of the stored energy function for frame indifferent isotropic hyperelastic materials.
Proposition 4.5
The following are equivalent:
-
(i)
A scalar function f of
 is invariant under orthogonal transformations.
is invariant under orthogonal transformations. -
(ii)
f is a function of the invariants of
 .
. -
(iii)
f is a symmetric function of the principal stretches.
 is invariant under orthogonal transformations.
is invariant under orthogonal transformations. .
.4.2.2 3D Discrete Stored Energy Function
Given the stored energy function \(W(I_1,I_2,I_3)\) of a frame indifferent isotropic hyperelastic material, the associated discrete stored energy function is defined as \(W_d:J^1 {\mathcal {Y}} _d \rightarrow {\mathbb {R}}\) with

For each  the value of \(W_d\) is found as the averaged value of the stored energy function evaluated on the discrete Cauchy–Green tensor at the nodes of
the value of \(W_d\) is found as the averaged value of the stored energy function evaluated on the discrete Cauchy–Green tensor at the nodes of  at time \(t^j\).
at time \(t^j\).
4.2.3 3D Discrete Second Piola–Kirchhoff Stress
It is defined at each node of each  as
as

\(\ell =1,...,8\). In particular, for an isotropic material, it takes the form

Example 4.6
(Nonlinear Mooney–Rivlin incompressible model)For this model, see (14), the discrete stored energy becomes

and the 3D discrete second Piola–Kirchhoff stress is

Incompressibility is imposed via a penalty term exactly as in the 2D case earlier, see (46).
4.3 3D Barotropic Fluid—Elastic Body Interactions
4.3.1 Discrete Lagrangians for the Fluid and the Elastic Body
The discrete Lagrangian \( {\mathcal {L}} ^{\mathsf {e}}_d\) of the elastic body is defined exactly as in the 2D case in (34) with the obvious modifications, namely we take the discrete kinetic energy

where \({\mathbf {v}}_{\alpha ,\beta ,\gamma }^j= (\varphi _{a,b,c}^{j+1}- \varphi _{a,b,c}^j)/\Delta t\), we take the discrete stored energy function

and the gravitational potential energy density

We proceed similarly for the discrete Lagrangian \( {\mathcal {L}} _d^{\mathsf {f}}\) of the fluid, see (38).
4.3.2 Discrete Action and Discrete Euler–Lagrange Equations
As earlier, we assume \( \phi _ { {\mathcal {X}} _d}(j,a,b,c)= (j \Delta t, a \Delta s_1, b \Delta s_2, c \Delta s_3)\) and the mass of each 3D cell in \( \Phi _{ {\mathcal {X}} _d}( {\mathbb {B}}_d)\) is \(M^{\mathsf {e}} = \rho _0^{\mathsf {e}} \Delta s_1 \Delta s_2 \Delta s_3\). The discrete action functional reads

Let us denote by \(D_k\), \(k=1,...,16\), the partial derivative of the discrete Lagrangians with respect to the k-th component of  , in the order given in (61). From the discrete Hamilton principle \( \delta S_d( \varphi _d)=0\), we get the discrete Euler–Lagrange equations in the general form
, in the order given in (61). From the discrete Hamilton principle \( \delta S_d( \varphi _d)=0\), we get the discrete Euler–Lagrange equations in the general form
for both \({\mathcal {L}}^{\mathsf {e}}_{d}\) and \({\mathcal {L}}^{\mathsf {f}}_{d}\), where we used the abbreviate notation  . For the discrete Lagrangians based on the discretizations given in (71)–(73), the discrete Euler–Lagrange equations (75) yield
. For the discrete Lagrangians based on the discretizations given in (71)–(73), the discrete Euler–Lagrange equations (75) yield

\({\mathsf {n}}={\mathsf {e}},{\mathsf {f}}\). The derivation of (76) is similar to the 2D case, see “Appendix A.1”. These equations give the dynamics at the interior of the elastic body and the fluid.
4.3.3 Impenetrability Conditions
The impenetrability conditions between the fluid nodes \(\varphi _{d,e,f}^j\), \(\varphi _{d+1,e,f}^j\), \(\varphi _{d,e+1,f}^j\), \(\varphi _{d+1,e+1,f}^j\) and the elastic body nodes are defined as follows, see Fig. 10,
The expression \((\varphi _{a-1,b,c}^j -\varphi _{a,b,c}^j) \times (\varphi _{a,b-1,c}^j -\varphi _{a,b,c}^j)\) represents the outward pointing normal vector field to the body, similarly in the other three conditions.
The associated penalty terms \(\Phi _{\mathrm{im}_i}\), \(i=1,...,4\) are defined as in (48). The directions of the reaction forces are given by the derivative with respect to the positions of the nodes, i.e.,
similarly for \(\Psi _{\mathrm{im}_2}, \Psi _{\mathrm{im}_3}, \Psi _{\mathrm{im}_4}\), see “Appendix A.4” for the expressions of these derivatives.

Fluid flowing above the hyperelastic body
The resulting discrete action functional is

where \(S_d\) is given in (74). The second term in (78) is associated to the incompressibility of the elastic body. In the third term, the second sum is taken over the boundary nodes of the fluid and, given such a boundary node \( \varphi _{d,e,f}^j\), the nodes of the elastic body in the four terms \(i=1,...,4\) are chosen in accordance with (77) for each functions \( \Phi _{\mathrm{im}_i}\), \(i=1,...,4\).
4.3.4 Symmetries and Discrete Noether Theorems
The discrete classical momentum map associated to the action of the special Euclidean group SE(3) takes the form

with

similarly for the fluid.
4.4 Barotropic Fluid Flowing Over a Mooney–Rivlin Hyperelastic Support
We consider an incompressible Mooney–Rivlin hyperelastic body, see (70), and a barotropic fluid described by the Tait equation with discrete internal energy term

The integrator is found by computing the criticality condition for the discrete action functional (78) which includes the incompressibility and impenetrability penalty terms. We simulate the following situation, see Fig. 11:
-
1.
The barotropic fluid has the properties \(\rho _0= 997 \, \mathrm {kg/m}^2\), \(\gamma =6 \), \(A = {\tilde{A}} \rho _0^{-\gamma }\) with \({{\tilde{A}}} = 3.041\times 10^4\) Pa, and \(B = 3.0397\times 10^4\) Pa. The size of the discrete reference configuration at time \(t^0\) is \(0.3\mathrm {m} \times 0.3 \mathrm {m} \times 0.05 \mathrm {m}\), with space-steps \(\Delta s_1=\Delta s_2=0.05\), \(\Delta s_3= 0.025\)m.
-
2.
The Mooney–Rivlin model has the properties \(\rho _0= 945 \, \mathrm {kg/m}^3\), \(C_1= 1.848\), and \(C_2= 0.264\) such that \(C_1/C_2=7\). The model is nearly incompressible, with coefficient \(r=10^4\) in the corresponding penalty term. The size of the discrete reference configuration at time \(t^0\) is \(1\mathrm {m} \times 1 \mathrm {m} \times 0.3 \mathrm {m}\) with space-steps \(\Delta s_1=\Delta s_2= 0.0625\)m, \(\Delta s_3= 0.1\)m.
-
3.
The four upper edges of the Mooney–Rivlin incompressible model are fixed.
-
4.
The time-step is \(\Delta t=2\times 10^{-4}\) and the test is carried out for 0.4s.
The results are reproduced in Fig. 11, where we used the notation \({\mathbf {J}}_d=({\mathsf {J}}_1,{\mathsf {J}}_2, {\mathsf {J}}_3,{\mathsf {J}}_4, {\mathsf {J}}_5,{\mathsf {J}}_6) \in {{\mathfrak {s}}}{{\mathfrak {e}}}(3)^*\). Due to the presence of the gravitation potential, the discrete Lagrangian is only invariant under the subgroup SE(2) of Euclidean transformations of the horizontal plane. This is why only the components \({\mathsf {J}}_3, {\mathsf {J}}_4, {\mathsf {J}}_5\) of the discrete momentum map \( {\mathbf {J}} _d\) are almost preserved. As in our 2D test, the fixing of the four upper edges prevents the exact conservation of these momentum maps.

Top to bottom on the left: Configuration after 0.002s, 0.1s, 0.4s, 0.5s, 0.6s. Top to bottom on the right: Evolution of total (fluid+solid) momentum maps, total (fluid+solid) energy, and relative total energy during 0.5s
5 Concluding Remarks and Future Directions
In this paper we introduced a structure preserving numerical integrator for hyperelastic solids, which is spacetime multisymplectic, symplectic in time, preserves exactly the momenta associated to symmetries, and nearly preserves total energy. The integrator is derived from a discrete variational formulation of hyperelasticity in the Lagrangian description. Thanks to its variational nature and its adequacy with a previously derived variational discretization for fluids, the scheme can naturally be extended to accommodate fluid–structure interaction problems via the inclusion of impenetrability penalty terms in the discrete action functional. Important steps in our approach were the definition of discrete deformation gradients, discrete Cauchy–Green deformation tensors and discrete Jacobians. The resulting integrator and its conservative properties were illustrated with numerical tests both in 2D and 3D. This paper only presented the very first steps towards the application of variational integrators to fluid–structure interaction problems. The discrete setting developed here opens several directions of research such as the inclusion of dynamic mesh update, inspired by arbitrary Lagrangian-Eulerian methods, and the treatment of h-adaptivity, by appropriate extensions of the variational discretization. One can also explore extensions of our model to take into account of the possible disconnection of fluid cells, which is useful to model the fragmentation of the flow after the impact. Finally, appropriate extensions of the discrete variational formulation need to be developed in order to treat other classes of continuum models, such as viscous-plastic materials.
Notes
Given the polar decomposition \({\mathbf {F}} ={\mathbf {R}}{\mathbf {U}}\) of the gradient deformation, the principal stretches \(\lambda _1, \lambda _2, \lambda _3\) are the eigenvalues of \({\mathbf {U}}\). In particular \(\lambda _1^2, \lambda _2^2, \lambda _3^2\) are the eigenvalues of \({\mathbf {C}} ={\mathbf {U}}^2\).
For simplicity we didn’t write explicitly the dependence of the invariants on \( {\mathbf {G}} \) and assumed \({\mathbf {G}}_{ij}= \delta _{ij}\).
References
Angoshtari, A., Yavari, A.: A geometric structure-preserving discretization scheme for incompressible linearized elasticity. Comput. Methods Appl. Mech. Eng. 259, 130–153 (2013)
Ariza, M.P., Ortiz, M.: Discrete crystal elasticity and discrete dislocations in crystals. Arch. Ration. Mech. Anal. 178(2), 149–226 (2005)
Cirak, F., West, M.: Decomposition contact response (DCR) for explicit finite element dynamics. Int. J. Numer. Meth. Eng. 64, 1078–1110 (2005)
Cottet, G.-H., Maitre, E., Milcent, T.: Eulerian formulation and level set models for incompressible fluid-structure interaction. ESAIM-Math. Model. Numer. Anal. 42(3), 471–492 (2008)
Demoures, F., Gay-Balmaz, F., Ratiu, T.S.: Multisymplectic variational integrator and space/time symplecticity. Anal. Appl. 14(3), 341–391 (2014a)
Demoures, F., Gay-Balmaz, F., Ratiu, T.S.: Multisymplectic variational integrators for nonsmooth Lagrangian continuum mechanics. Forum Math. Sigma 4(e19), 54p (2016)
Demoures, F., Gay-Balmaz, F., Desbrun, M., Ratiu, T.S., Alejandro, A.: A multisymplectic integrator for elastodynamic frictionless impact problems. Comput. Methods Appl. Mech. Eng. 315, 1025–1052 (2017)
Demoures, F., Gay-Balmaz, F., Kobilarov, M., Ratiu, T.S.: Multisymplectic Lie group variational integrators for a geometrically exact beam in \({\mathbb{R} } ^3 \). Commun. Nonlinear Sci. Numer. Simulat. 19(10), 3492–3512 (2014b)
Demoures, F., Gay-Balmaz F.: Multisymplectic variational integrators for barotropic and incompressible fluid models with constraints, submitted (2021) arXiv:2102.10907
Gay-Balmaz, F., Marsden, J.E., Ratiu, T.S.: Reduced variational formulations in free boundary continuum mechanics. J. Nonlinear Sci. 22(4), 463–497 (2012)
Gotay, M. J., Isenberg, J., Marsden, J. E., Montgomery, R., Sniatycki, J., Yasskin, P. B.: Momentum maps and classical fields. Part I: Covariant field theory. (1997) arXiv: physics/9801019
Glowinski, R., Pan, T.-W., Périaux, J.A.: Lagrange multiplier/fictitious domain method for the numerical simulation of incompressible viscous flow around moving rigid bodies: (i) case where the rigid body motions are known a priori. CR Acad. Sci. Paris 25(5), 361–9 (1997)
Hirt, C.W., Amsden, A.A., Cook, J.L.: An arbitrary Lagrangian-Eulerian computing method for all flow speeds. J. Comput. Phys. 135(2), 203–216 (1997)
Hou, G., Wang, J., Layton, A.: Numerical methods for fluid-structure interaction - a review. Commun. Comput. Phys. 12(2), 337–377 (2012)
Kamrin, K., Rycroft, C.H., Nave, J.C.: Reference map technique for finite-strain elasticity and fluid-solid interaction. J. Mech. Phys. Solids 60(11), 1952–1969 (2012)
Kanso, E., Marsden, J.E., Rowley, C., Melli-Huber, J.-H.: Locomotion of Articulated Bodies in a Perfect Fluid. J. Nonlinear Sci. 15, 255–289 (2005)
Khayyer, A., Gotoh, H., Falahaty, H., Shimizu, Y.: An enhanced ISPH-SPH coupled method for simulation of incompressible fluid-elastic structure interactions. Comput. Phys. Commun. 232, 139–164 (2018)
Lefrançois, E., Boufflet, J.-P.: An introduction to fluid-structure interaction: Application to the piston problem. SIAM Rev. 52, 747–767 (2010)
Lew, A., Marsden, J.E., Ortiz, M., West, M.: Asynchronous variational integrators. Arch. Rational Mech. Anal. 167(2), 85–146 (2003)
van Loon, R., Anderson, P.D., van de Vosse, F.N., Sherwin, S.J.: Comparison of various fluid-structure interaction methods for deformable bodies. Comput. Struct. 85(11–14), 833–843 (2007)
Marsden, J.E., Hughes, T.J.R.: Mathematical Foundations of Elasticity. Prentice-Hall (1983)
Marsden, J.E., Patrick, G.W., Shkoller, S.: Multisymplectic geometry, variational integrators and nonlinear PDEs. Comm. Math. Phys. 199, 351–395 (1998)
Marsden, J.E., Pekarsky, S., Shkoller, S., West, M.: Variational methods, multisymplectic geometry and continuum mechanics. J. Geom. Phys. 38, 253–284 (2001)
Marsden, J.E., West, M.: Discrete mechanics and variational integrators. Acta Numer. 10, 357–514 (2001)
Mooney, M.: A theory of large elastic deformation. J. Appl. Phys. 11(6), 582–592 (1940)
Nocedal, J., Wright, S. J.: Numerical Optimization, Springer Series in Operations Research and Financial Engineering. Springer (2006)
Peskin, C.S., McQueen, D.M.: A three-dimensional computational method for blood flow in the heart i. immersed elastic fibers in a viscous incompressible fluid. J. Comp. Phys. 81, 372–405 (1989)
Peskin, C.S.: The immersed boundary method. Acta Numer. 11, 479–517 (2002)
Rivlin, R.S.: Large elastic deformations of isotropic materials. IV. Further developments of the general theory. Philos. Trans. R. Soc. A24I(6), 379–397 (1948)
Rivlin, R.S.: Large elastic deformations of isotropic materials. V. The problem of flexure. Proc. R. Soc. Lond. A195(6), 463–473 (1949)
Rivlin, R.S.: Large clastic deformations of isotropic materials. VI. Further results in the theory of torsion, shear and flexure. Philos. Trans. R. Soc. A242(6), 173–195 (1949)
Rockafellar, R.T.: Lagrange multipliers and optimality. SIAM Rev. 35(2), 183–238 (1993)
Rockafellar, R.T., Wets, R.J.-B.: Variational Analysis, Grundlehren der Mathematischen Wissenschaften, vol. 317. Springer-Verlag, Berlin (1998)
Simo, J.C., Laursen, T.A.: An augmented Lagrangian treatment of contact problems involving friction. Comput. Struct. 42(1), 97–116 (1992)
Yavari, A.: On geometric discretization of elasticity. J. Math. Phys. 49, 022901 (2008)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Melvin Leok.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Appendix
A Appendix
1.1 2D Discrete Hyperelastic Models
To compute the partial derivatives \(D_k {\mathcal {L}} ^j_{a,b}\) of the discrete Lagrangian (34) we note

for all \(\ell =1,...,4\) and all \( k=1,3,5,7\). We observe that the 16 expressions  are independent of the value of the field \( \varphi _d \) and on the location of the spacetime node (if the spacing \( \Delta s_a\) and \( \Delta s_b\) are constant), i.e., we can write
are independent of the value of the field \( \varphi _d \) and on the location of the spacetime node (if the spacing \( \Delta s_a\) and \( \Delta s_b\) are constant), i.e., we can write  . For instance, for \(\ell =1\), we have
. For instance, for \(\ell =1\), we have
and for \(\ell =2\), we have
similarly for \(\ell =3,4\). We can thus write

where in the last equality we defined the operator \({\mathfrak {D}}_k^\ell \), \(k=1,3,5,7\), \(\ell =1,2,3,4\), by duality.
From this, the partial derivatives \(D_k {\mathcal {L}} _{a,b}^j\) of the discrete Lagrangian can be computed. For instance for \(k=1\) one has

Using this result, one then derives (42) from (75).
1.2 3D Discrete Jacobian

1.3 3D Discrete Cauchy–Green Deformation Tensor

1.4 3D Derivatives of Impenetrability Constraints (77)
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Demoures, F., Gay-Balmaz, F. Unified Discrete Multisymplectic Lagrangian Formulation for Hyperelastic Solids and Barotropic Fluids. J Nonlinear Sci 32, 94 (2022). https://doi.org/10.1007/s00332-022-09849-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00332-022-09849-y
Keywords
- Variational discretization
- Nonlinear elasticity
- Fluid-structure interaction
- Multisymplectic integrators
- Constraints
- Discrete Cauchy-Green tensors