
Abstract
We study the dynamics of a rigid body in a central gravitational field modeled as a Hamiltonian system with continuous rotational symmetries following the geometric framework of Wang et al. Novelties of our work are the use the reduced energy-momentum for the stability analysis and the treatment of axisymmetric bodies. We explicitly show the existence of new relative equilibria and study their stability and bifurcation patterns.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
This article studies the dynamics of two massive bodies of finite extent subject to their mutual gravitational attraction. We assume that one of the bodies, the primary, has a mass much greater than the other, the satellite, and that the primary body is spherically symmetric. The problem is then equivalent to the dynamics of a single rigid body in a central gravitational field. This system has the mathematical structure of a Hamiltonian system with symmetries. The symmetry assumption allows for considerable simplifications and provides a valuable approximation from which additional effects can be further studied using perturbation theory. We remark that the spherical symmetry assumption for the primary does not hold if, for example, we consider the Earth as the primary body. The study of non-symmetric primary bodies lies out of the scope of this paper.
In the traditional approach to this problem (see Meirovitch 1970), the additional assumption that the motion of the center of mass of the satellite is unaffected by the finite extent of the body was frequently used. That is, the orbit described by the center of mass of the satellite is the same as if the satellite were replaced by a point mass. This further assumption is known in the literature as the restricted problem. In our geometric approach we will not adopt this assumption, we will consider the full coupling of the system, or unrestricted problem.
Since the global dynamics of this system may be very complicated, we will focus on the study of its relative equilibria, which are dynamical evolution orbits which are contained in group orbits. Relative equilibria act as organizing centers for the dynamics of a Hamiltonian system with symmetries, and therefore, the study of the set of relative equilibria gives important information about the qualitative behavior of the dynamical flow. There are several classical studies on the coupling between orbital and attitude motion for the satellite motion, but in most of them the natural geometric and group-theoretic properties of the problem are not fully exploited. The first geometric treatment of this system is Wang et al. (1990), where Poisson reduction and the energy-Casimir method were the main tools employed in giving a full description of relative equilibria for large orbital radius. In this article, we will extend that work to the low-orbit regime, and in particular, we provide an analytic description of the complete set of relative equilibria that exist for small values of the orbital radius.
One novelty of our geometric treatment is that we also study the axisymmetric case, where in addition to the spatial rotational symmetry there is a \(S^1\) body symmetry corresponding to rotations about a symmetry axis of the satellite. This also expands the work of Wang et al. (1990), where only the spatial rotational symmetry was considered. This axisymmetric case has been previously studied in Beck (1997) using the energy-Casimir method, whereas we treat this case via the reduced energy-momentum method.
For both the asymmetric and axisymmetric cases, we have found a complete description of all the existing relative equilibria families. In the axisymmetric case, we have shown that a family of conical equilibria exists for arbitrary large orbits. This is a new family of relative equilibria that does not seem to have been described in the literature before. In fact, in O’Reilly and Tan (2004), based on Routhian reduction and numerical continuations, it is suggested that there were no conical equilibria for large orbits but that conclusion is due to the fact that their continuation path only detected the conical equilibria for very small orbits. Had they used a different continuation path, they would have found the conical equilibria.
1.1 Organization of the Paper
In Sect. 2, we describe the system modeling the motion of a satellite under the second-order potential. In Sect. 3, we analytically characterize existence conditions for the different relative equilibria of the asymmetric satellite. In particular, in Proposition 3.4, we explicitly parametrize conical equilibria, a family of motions, existing for small orbital radii, in which the center of the orbit does not coincide with the center of the potential. To our knowledge, until now only through numerical descriptions (Wang et al. 1990; O’Reilly and Tan 2004) of this phenomenon existed. In Sect. 3.8, we find that the different families can be classified in a very clean way using only symmetry considerations. In Sects. 3.5, 3.6, and 3.7, we use the reduced energy-momentum method to study the stability of the different families. In Sect. 3.9, we describe the bifurcation schemes for the different relative equilibria. It appears that this is the first analytic treatment in the low-orbit regime.
In Sect. 4, we study the axisymmetric satellite. Propositions 4.1 and 4.3 give explicit existence conditions for all possible relative equilibria. In particular, they show that conical equilibria exist for any value of the orbital radius as opposed to the situation in the asymmetric case (see Remark 4.6). In Propositions 4.8, 4.11, 4.13, and 4.14, the reduced energy-momentum is applied to all the different families to provide stability and instability ranges. In Sect. 4.10, we describe the different bifurcations between the different families of relative equilibria. The behavior observed is very similar to what happens in the restricted problem (see Beck 1997). The main difference is that the restricted problem cannot predict the non-orthogonality of the conical solutions.
2 Model of a Rigid Body in a Central Field
2.1 Configuration Space
We will consider a spherically symmetric primary body of mass \({m}_1\) and a satellite of mass \({m}_2\) and arbitrary mass distribution. We will assume that \({m}_1\) is much larger than \({m}_2\); that is, the satellite does not affect the motion of the primary. Therefore, the primary will be at rest in an inertial reference.
With these assumptions, the configuration space of the satellite in the central field generated by the primary is \(Q=\hbox {SO}(3)\times \mathbb {R}^3\). A point in this manifold will be denoted in space coordinates by \(q=(B,{\mathbf{r}})\). B is the orthogonal matrix that realizes the transformation mapping the satellite from a reference configuration \({\mathcal {R}}\) to its orientation in space, and \({\mathbf{r}}\) is the vector between the center of the field and the center of mass of the satellite. In body coordinates, this configuration point is represented by \((B,{\mathbf{R}})\), where \({\mathbf{R}}=B^T {\mathbf{r}}\).
Let \(\mathbf{v}=(v_1,v_2,v_3)\) be a vector of \(\mathbb {R}^3\), we denote by \(\widehat{\mathbf{v}}\) the \(3\times 3\) matrix
Note that for any vector \(\mathbf{u}\), the matrix \(\widehat{\mathbf{v}}\) is related to the cross product through the identity \(\widehat{\mathbf{v}} \mathbf{u}=\mathbf{v}\times \mathbf{u}\).
We denote a tangent vector \((\dot{B},\dot{\mathbf{r}})\) at \((B,\mathbf{r})\), in space coordinates, as \((\Omega ,\dot{\mathbf{r}})\in \mathbb {R}^3\times \mathbb {R}^3\). Here, we have used the left trivialization of \(T\mathrm{SO}(3)\) given by \(\dot{B}=B\widehat{\Omega }\). Analogously, vectors in body coordinates are represented as \((\Omega ,\dot{\mathbf{R}})\).
In Fig. 1, we have represented the general setting of our problem and the chosen coordinates.

Coordinates in the configuration space: \(\mathbf{r}\) is the vector that joins the centers of masses of the primary and the satellite; \(\{\mathbf{e}_1,\mathbf{e}_2, \mathbf{e}_3\}\) is an orthonormal basis attached to the body and aligned with the principal moments of inertia of the satellite
2.2 Hamiltonian Description
In order to simplify the algebraic manipulation of expressions that will appear, we will choose, according to Beck (1997), Wang et al. (1992), the following units of mass, length, and time
where \({\mathbf{I}}\) is the body-fixed inertia tensor and G is the gravitational constant. Note that with respect to these units, the satellite has unit mass and its inertia tensor satisfies \(\text{ tr }({\mathbf{I}})=1\). All the expressions appearing in this paper will be referred to these units.
The kinetic energy metric is given by the sum of the rotational and translational kinetic energies of the satellite. In space coordinates
while in body coordinates
where \( \langle \! \langle \cdot ,\cdot \rangle \! \rangle \) is the Riemannian metric on \(\mathrm{SO}(3)\times \mathbb {R}^3\) given by
Without loss of generality will choose a basis such that \({\mathbf{I}}\) takes a diagonal form.
Remark 2.1
The inertia tensor has the form \({\mathbf{I}}={\text {diag}}(I_1,I_2,I_3)\) , and since \({\text {tr}}\,{\mathbf{I}}=1\), two parameters are enough to determine it. Also its values must satisfy the usual triangular inequalities (\(I_i<I_j+I_k\)) that in this case imply \(0<I_i<\frac{1}{2}\).
The potential energy corresponding to the inverse square force field can be written in the integral form:
where \(\mathbf{{r}'}\) is the vector from the center of mass of the satellite to the point with mass density \(\hbox {dm}_2(\mathbf{{r}'})\). Note that in body coordinates \((B,{\mathbf{R}})\), the potential does not depend on B, which is a consequence of the rotational symmetry of the system.
Usually, the radial distance \(|{\mathbf{R}}+{\mathbf{r}}'|\) is going to be much larger than the dimensions of the satellite. Therefore, we can expand \(|{\mathbf{R}}+{\mathbf{r}}'|^{-1}\) in power series of \({R}^{-1}=|\mathbf{{R} }|^{-1}\). After a lengthy computation in Cartesian coordinates [see Meirovitch 1970 equation (11.111) for more details], the classical second-order approximation to the potential (also known as MacCullagh’s formula) is
The second-order system will be the Hamiltonian system on \(T^*(\mathrm{SO}(3)\times \mathbb {R}^3)\) governed by the Hamiltonian
which is an approximation of the exact Hamiltonian
Here, we use the notation K to define the corresponding kinetic energy induced in the fibers of \(T^*\mathrm{SO}(3)\) from the Riemannian metric \(\langle \! \langle \cdot ,\cdot \rangle \! \rangle \) as usual. All throughout this article, we will consider the second-order model, with Hamiltonian \(H_2\).
2.3 Symmetries and Relative Equilibria
On the configuration space \(Q=\mathrm{SO}(3)\times \mathbb {R}^3\), there is a natural action of \(G^\mathrm{asym}_0=\hbox {SO}(3)\), given in space coordinates by \(M\cdot (B,\mathbf{r})=(MB,M\mathbf{r})\) or, in body coordinates, by \(M\cdot (B,\mathbf{R})=(MB,\mathbf{R})\), with \(M\in \mathrm{SO}(3)\).
The fundamental fields of this action are given, for any \(\xi \in \mathfrak {so}(3)\simeq \mathbb {R}^3\), by
which is represented in space coordinates by
and in body coordinates by
This action leaves the metric (2.2) and the potentials (2.3, 2.4) invariant, so (2.5) and the exact system (2.6) are \(G^\mathrm{asym}_0\)-symmetric simple mechanical systems (see the Appendix). The momentum map of the \(G^\mathrm{asym}_0\)-action on \(T^*\mathrm{SO}(3)\) corresponds to the total angular momentum, the sum of the angular momenta due to orbital and spinning motions.
From the above computations, the locked inertia tensor is given in body coordinates by

Remark 2.2
It is interesting to describe what are the one-parameter subgroup orbits of \(G^\mathrm{asym}_0\) in spatial coordinates. The orbit of the point \((B_0,\mathbf{r}_0)\) generated by the Lie algebra element \(\xi \) is given by \(B(t)=\exp (t\hat{\xi })\cdot B_0\) and \(\mathbf{r}(t)=\exp (t\hat{\xi })\cdot \mathbf{r}_0\). But also:
That is, the vector \(\mathbf{r}\) describes a right circular cone with vertex at the origin and center at \(C=\frac{\mathbf{r}_0\cdot \xi }{|\xi |^2}\xi \). Note that if \(\xi \cdot \mathbf{r}_0\ne 0\), the orbit center C does not coincide with the center of the potential O.
Definition 2.3
A relative equilibrium such that \(\mathbf{r}\cdot \xi =0\) is called orthogonal equilibrium, otherwise it will be called non-orthogonal.
For orthogonal equilibria, the center of mass the rigid body describes a circle whose center coincides with the center of the potential (i.e., \(C=O\)), but in the non-orthogonal equilibria \(C\ne O\) the orbit is a circle in plane not containing the center of the potential as explained in the previous remark.
Remark 2.4
There exist several different names for the orthogonal/non-orthogonal dichotomy in the literature. In O’Reilly and Tan (2004), it is distinguished between “coplanar” and “non-coplanar” motions, and in Wang et al. (1990), the terminology “great-circle motions” and “non-great-circle motions” is used.
In Stepanov (1969), the offset angle \(\varkappa \) is defined as the angle of \(\mathbf{r}\) with the orbital plane; that is,
Although one may think that the only physically meaningful value for \(\varkappa \) is \(\varkappa =0\), this is not always the case. In fact, the coupling between spinning and orbital motion can actually produce dynamical orbits with \(\varkappa \ne 0\).
2.4 Discrete Symmetries
The second-order model (2.5) has an additional set of discrete symmetries. Let \(\varGamma ^\mathrm{asym}\) be the group of transformations of Q generated by the symmetry
and the three perpendicular rotations
where \(\rho _i\) is a rotation of angle \(\pi \) around the ith principal axis of the satellite.
Using the following \(3\times 3\) matrix representation of the generators of \(\varGamma ^\mathrm{asym}\) in body coordinates as
the action of \(\varGamma ^\mathrm{asym}\) on the configuration space \(\mathrm{SO}(3)\times \mathbb {R}^3\) is
The total symmetry group of the second-order model will be the direct product \(G^\mathrm{asym}:=\hbox {SO}(3)\times \varGamma ^\mathrm{asym}\) that acts on \(\mathrm{SO}(3)\times \mathbb {R}^3\) as
with \((M,A)\in \hbox {SO}(3)\times \varGamma ^\mathrm{asym}\). The lift of this action to \(T(\mathrm{SO}(3)\times \mathbb {R}^3)\) is given by
It is easily verified that \((Q,\langle \! \langle ,\rangle \! \rangle ,G^\mathrm{axi},V_2)\) is a \(G^\mathrm{asym}\)-symmetric simple mechanical system.
Remark 2.5
Although \(G^\mathrm{asym}_0\) acts freely on \(\mathrm{SO}(3)\times \mathbb {R}^3\), the action of \(G^\mathrm{asym}\) on Q is only locally free, thereby exhibiting discrete stabilizers for certain points. This fact will be exploited in the subsequent classifications of relative equilibria.
Remark 2.6
For the exact model (2.6), one can easily check that \(\varGamma ^\mathrm{asym}\) fixes the metric (2.2). However, the potential (2.3) will be invariant only if the mass distribution \(\hbox {dm}_2(\mathbf{r}')\) is invariant under the transformations \(s,\rho _1,\rho _2,\rho _3\). Therefore, in general, \(G^\mathrm{asym}\) is not a symmetry of the exact model.
3 Asymmetric Case
In this section, we will assume that the three principal moments of inertia \(I_1,I_2,I_3\) are pairwise different. A body satisfying this condition will be called asymmetric. In Sect. 4, we will consider axisymmetric bodies, which are those having two equal moments of inertia. In both cases, we will study all the possible relative equilibria, as well as their stability and bifurcation properties.
3.1 Existence of Relative Equilibria
Relative equilibria pairs \((q,\xi )\in Q\times {\mathfrak {g}}^\mathrm{asym}\) are characterized as those for which q is a critical point of the augmented potential \(V_\xi \in C^\infty (Q)\) (Theorem 5.1). By \(G^\mathrm{asym}\)-invariance, we can assume, without loss of generality, that any critical point \(q_e\) is of the form \(q_e=(\text {Id},\mathbf{R})\). If we call \(R=|\mathbf{R}|\), the vanishing of the first variation of \(V_\xi \) evaluated at \(B=\text {Id}\) is equivalent to the equations
We also have that in the second-order approximation considered
Therefore, the relative equilibrium conditions for the second-order model can be rewritten as
for some real \(\alpha \).
3.2 Orthogonal Equilibria: Characterization
If we assume \(\xi \cdot \mathbf{R}=0\), Eq. (3.3) are greatly simplified. This condition defines orthogonal relative equilibria (see Definition 2.3). The following result is reproduced from Wang et al. (1990), where it is proved that the orthogonality assumption is always satisfied if in the second-order model we consider large orbital radii.
Proposition 3.1
(Wang et al. 1990; Beck 1997) In the second-order model (2.5), for a fixed orbital radius \(R>\frac{3}{2}\)
-
Up to group translations, there are exactly six different relative equilibria for any given R.
-
For each of them, \(\mathbf{R}\) and \(B^T\xi \) are perpendicular and aligned with two different principal axis of the body.
-
The angular velocity is given by the modified Kepler’s formula
$$\begin{aligned} |\xi |^2=\frac{1}{R^3}+\frac{1}{2}\frac{3-9I_R}{R^5} \end{aligned}$$(3.4)where \(I_R=(\mathbf{R}\cdot {\mathbf{I}}\mathbf{R})/R^2\).
The six possibilities arise from choosing a principal axis for \(\mathbf{R}\) and then a perpendicular principal axis for \(B^T\xi \). The orientation of \(\mathbf{R}\) or \(\xi \) along the principal axis is not relevant because it can be changed using a \(G^\mathrm{asym}\)-symmetry.
Remark 3.2
The first analysis of relative equilibria for this problem was given by Lagrange in 1780. In that reference, he did not analyze the second-order system but a simplified one where he truncated the force and angular torque exerted on the satellite to the dominant term, finding that the translational and rotational motions decoupled in that approximation (in the literature, this approximation is known as the restricted problem Beck 1997). All the resulting relative equilibria happen to be orthogonal, and the attitude is as in Proposition 3.1. That is, one of the principal axes is aligned with the radial direction and another is perpendicular to the orbital plane.
3.3 Parallel Equilibria: Characterization
If we assume that \({\mathbf{R}}\) is an eigenvector of \({\mathbf{I}}\), Eq. (3.3b) implies that either \(\xi \cdot \mathbf{R}=0\) (orthogonal equilibria) or \(\mathbf{R}\parallel \xi \). The first case is covered in the previous subsection. In the second case, (3.3b) fixes R but \(\vert \xi \vert \) is arbitrary. This is equivalent to
where as in Proposition 3.1, \(I_R=({\mathbf{R}} \cdot \mathbf{IR})/R^2\). That is, there is a family of parallel equilibria for each principal axis such that \(I_i>\frac{1}{3}\).
Remark 3.3
Although the case \({\mathbf{R}}\parallel \xi \) (parallel equilibrium) is a valid solution of Eq. (3.1), this is a shortfall of the second-order model. Indeed, under this assumption, (3.1b) gives \(\nabla _{\mathbf{R}} V_2({\mathbf{R}})=0\). This means that the potential is neither attractive nor repulsive which is an impossibility for a gravitational field. This behavior is an artifact of the potential approximation (2.4), for which the correction terms in \(R^{-3}\) become dominant as R approaches 0 making the approximation unphysical for very small R. In fact, from the above equation, we can infer the upper bound
in order for parallel equilibria to exist. For instance, if we consider the International Space Station orbiting around the Earth using the second-order model, \(\nabla _{\mathbf{R}} V_2({\mathbf{R}})=0\) will only happen when the distance from the center of the ISS to the center of the Earth is about 50 m.
3.4 Conical Equilibria: Characterization
For cases different from \(\xi \cdot \mathbf{R}=0\) or \(\xi \parallel \mathbf{R}\), Eq. (3.3) can still be analytically solved.
Proposition 3.4
There exist conical relative equilibria for the second-order system (2.5) for which \(\mathrm{\mathbf{R}}\) and \(\xi \) are neither parallel nor perpendicular. In those solutions, \(\mathrm{\mathbf{R}}\) and \(\xi \) belong to one of the principal planes determined by the inertia tensor \(\mathrm{\mathbf{I}}\). If a basis of principal axes is chosen such that \({\mathbf{R}}\) and \(\xi \) are in the plane spanned by the first two eigenvectors of \({\mathbf{I}}={\text {diag}}(I_1,I_2,I_3)\), then \({\mathbf{R}}=(R\cos \psi ,R\sin \psi , 0)\) satisfies
with \(S=\cos ^2\psi \) and
For this relative equilibrium, if \(\nabla _{{\mathbf{R}}} V_2({\mathbf{R}})=(g_1,g_2,0)\), then the associated angular velocity is \(\xi =k^{-1} (-g_2,g_1,0)\) where \(k\in \mathbb {R}\) satisfies
Proof
From (3.3a), we have that if the equilibrium is not orthogonal, then \(\mathrm{\mathbf{R}}\) must belong to the plane spanned by \(\xi \) and \({\mathbf{I}} \xi \). Substituting this in (3.3b) gives a linear relationship between \(\xi ,\,{\mathbf{I}} \xi \) and \({\mathbf{I}}^2 \xi \). This implies that if we take a basis aligned with the principal axes of \({\mathbf{I}}\), the following matrix must be singular
We see that this happens only if two \(I_i\) are equal (axisymmetric case) or if some component of \(\xi \) vanishes. Since in this section we are studying the asymmetric case, we will only consider the second option. Without loss of generality we can reorder the basis vectors so that \(\xi _3=0\). Using (3.3a), this implies \(R_3=0\). Let \({\mathbf{R}}=(R\cos \psi , R\sin \psi ,0)\). Using this assumption and (3.3b), we have
which implies that there is some \(k\in \mathbb {R}\) such that \(\nabla _{{\mathbf{R}}} V_2({\mathbf{R}})=k(-\xi _2,\xi _1,0).\) Let \(\nabla _{{\mathbf{R}}} V_2({{\mathbf{R}}})=(g_1,g_2,0)\). Note that \(g_1,g_2\) are functions of r and \(\psi \) only. With these definitions, (3.3a) is equivalent to
for some \(\beta \in \mathbb {R}\). After eliminating \(\beta \), we obtain the equation
where \(S=\cos ^2\psi \) and \(A_4,A_2,A_0\) are defined in (3.7b). If \(\cos \psi \sin \psi =0\), then \(\mathbf{R}\) is an eigenvector of \(\mathbf{I}\) and as we saw above the solution is either a orthogonal or a parallel equilibrium. Therefore, we can assume that \(A_4S^2 +A_2S +A_0=0\) and \(\cos ^2\psi \) is a function of r.
Now multiplying (3.3b) with \(\mathbf{R}\), after some simplifications we arrive at (3.8). Note that this has a real solution if and only if \(\nabla _\mathbf{R} V_2(\mathbf{R})\cdot \mathbf{R}>0\) or equivalently
\(\square \)
Remark 3.5
Notice that some authors (see for instance Wang et al. 1990) use the name oblique equilibria corresponding to our definition of conical equilibria.
We have found algebraic conditions for the existence of conical equilibria. In order to obtain one such relative equilibrium, one can proceed as follows. Given a value of \(R=|{\mathbf{R}}|\)
-
Check if \(A_4S^2+A_2S+A_0=0\) has a solution \(0<S<1\). Let \(S=\cos ^2 \psi \)
-
From this S, construct \((g_1,g_2)\) using \((R,\psi )\) and check if \(g_1 R\cos \psi +g_2R\sin \psi >0\). In that case obtain k from (3.8).
-
The relative equilibrium is characterized by \({\mathbf{R}}=(R\cos \psi , R\sin \psi ,0)\) and \(\xi =k^{-1} (-g_2,g_1,0)\).
Remark 3.6
Actually in Beck (1997), it is proved that non-orthogonal equilibria could exist only if
As a consequence, the range of orbits in which conical equilibria exist is bounded by (3.10) and (3.9).
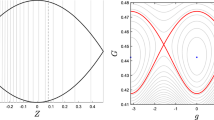
In Fig. 2, we have represented the three different families of relative equilibria for the asymmetric case.

Orthogonal and conical families of relative equilibria for the asymmetric body
3.5 Orthogonal Equilibria: Stability
If \(((\mathrm{Id},\mathbf{R}),\xi )\in Q\times {\mathfrak {g}}^\mathrm{asym}\) is an orthogonal relative equilibrium, according to Proposition 3.1 and using the \(G^\mathrm{asym}\)-symmetry, there is a basis such that the inertia tensor is \(\mathbf{I}= {\text {diag}}(I_1,I_2,I_3)\), the angular velocity is \(\xi =(\xi _1,0,0)\in \mathfrak {so}(3)\), \(\mathbf{R}=(0,R,0)\) where \(\xi _1>0\), \(R>0\) and the relationship between R and \({\xi _1}\) is given by (3.4). We will now implement the reduced energy-momentum method (see the Appendix) in order to study its stability.
The metric (2.2) and momentum at the equilibrium point are

Notation 3.7
From now on, we will use the usual notation \(\mathbf{e}_i\) for a vector with all the entries equal to zero except the ith component being 1, being the total number of entries clear from the context.
With the above expressions, we have
Using this basis, we obtain the Arnold form (5.3)

Taking variations of the locked inertia tensor (2.7) and evaluating at the relative equilibrium, we have

with \(\delta \varvec{\theta }, \delta \mathbf{R}\in \mathbb {R}^3\). Therefore, one possible choice for the basis of \(\mathcal {V}_\mathrm{INT}\) [see (5.2)] is
In this basis, the Smale form is diagonal and, after some simplifications, we arrive at
Proposition 3.8
There is a critical value \(R_\mathrm{crit}>0\) such that all the orthogonal relative equilibria satisfying the Lagrange stability conditions
are \(G^\mathrm{asym}_\mu \)-stable if \(R=|{\mathbf{R}}|>R_\mathrm{crit}\) and linearly unstable if \(R<R_\mathrm{crit}\). In particular, this critical value satisfies \(R_\mathrm{crit}<\frac{5}{2}\).
Proof
According to the reduced energy-momentum method (Proposition 5.4), we only need to test the positiveness of the diagonal values of (3.11) and (3.12). Up to positive factors, \(\mathbf{Ar}\) has eigenvalues \(A_1=I_1-I_3, \quad A_2=1+(I_1-I_2)R^{-2}\) which, under the Lagrange conditions (3.13), are both positive. In a similar way, up to positive factors \(\mathbf{Sm}\) has eigenvalues
The Lagrange conditions (3.13) and \(I_1+I_2+I_3=1\) (Remark 2.1) imply that \(I_2<\frac{1}{3}\) and \(I_1>\frac{1}{3}\). Hence,
That is, the Lagrange conditions imply that \(S_2>0\) and \(S_3>0\). Therefore, the only mechanism for loosing definiteness of \(\mathbf{Sm}\) is when \(S_1\) changes sign, but it follows from Proposition 5.5 that changing the sign of a single eigenvalue implies instability. After some calculations, \(S_1\) can be expressed as
Note that \(9I_2-6I_1-3=3(3I_2-1)-6I_1<0\) and \(-15I_1+45I_1I_2=15I_1(-1+3I_2)<0\). Applying Descartes’ rule of signs, the equation \(S_1=0\) has only one solution \(R_\text {crit}\); that is, if \(R>R_\text {crit}\), then \(S_1>0\) and if \(R<R_\text {crit}\) then \(S_1<0\).
Since \(9I_2-6I_1-3>-6I_1-3>-9\) and \(-15I_1+45I_1I_2>-15I_1>-15\), we have that
but as the polynomial \(2R^4 -9 R^2 -15\) is positive for \(R>\frac{5}{2}\), we have the inequality \(R_\text {crit}<\frac{5}{2}\). \(\square \)
Remark 3.9
Using the reduced energy-momentum method, we have obtained precise bounds for the validity of the Lagrange conditions. In most physical applications, the radius in the chosen normalization [see (2.1)] is very large, and then in a first approximation (similar to the computations of Wang et al. 1990), we can neglect higher-order terms of \(R^{-1}\), thereby reobtaining the classical Lagrange stability conditions (Lagrange 1780) for the restricted problem.
We can relate the Lagrange conditions with the relative equilibria of the free rigid body. The stable relative equilibria for a free rigid body are the rotations around its axes of minimum or maximum inertia. However, in our problem, due to the existence of a central force field, only rotations around the axis of maximum inertia are stable.
3.6 Parallel Equilibria: Stability
The stability of the family of parallel equilibria can also be studied using the reduced energy-momentum method. Let \(R=R^*\) be a solution for \(1+\frac{3}{2R^2}(1-3I_2)=0\). Using the \(G^\mathrm{asym}\)-symmetry, there is a basis that diagonalizes \(\mathbf{I}\) such that the equilibrium point can be expressed as
where \(\xi _2\) is a free parameter. A possible choice of bases adapted to the method is
With respect to this basis, \(\mathbf{Ar}\) is diagonal with eigenvalues
and \(\mathbf{Sm}\) is also diagonal with eigenvalues
Given these eigenvalues, there are two values of \(\xi _2\) that make the Hessian degenerate (4 if counted with signs). These correspond to the two values where bifurcations to the conical family occur as we will see in Sect. 3.9.
The Arnold form in this case is never positive definite, so we cannot guarantee stability. Indeed, suppose the Arnold form were positive definite, then we would have
Combining these two expressions, we get
but, as obtained in Sect. 3.3, \(I_2\) would have to be greater than \(\frac{1}{3}\) for the existence of parallel equilibria in the \(\mathbf{e}_2\) direction, which is a contradiction.
Certain values of the parameters \(I_1,I_2,I_3\) can make the reduced energy-momentum method inconclusive. Choosing several numerical values for those parameters, we have computed the eigenvalues of the linearized Hamiltonian field, and in all the cases, we have found that at least one of them has a positive real part leading to instability (see Appendix 2 for a concrete example). Unfortunately, we do not have an algebraic proof of this the case always.
3.7 Conical Equilibria: Stability
The application of the reduced energy-momentum method to the family of conical equilibria yields analytically intractable algebraic relations. However, choosing several representative values of the parameters \(I_1,I_2\), numerical estimations of the eigenvalues of \(\mathbf{d}^2 V_\mu \) and the linearization of the Hamiltonian vector field suggest that this family is unstable (see Appendix 2 for a concrete example). We are not aware of rigorous results in the literature along these lines.
3.8 Isotropy Subgroups
For each of the relative equilibria \((q,p)\in T^*(\hbox {SO}(3)\times \mathbb {R}^3)\), we can compute in a straightforward manner the isotropy groups of the base point q, the momentum value \(\mu =\mathbf{J}(q,p)\), and the relative equilibria itself \(z:=(q,p)\) with respect to the symmetry group \(G^\mathrm{asym}\). For example, using Proposition 3.1 and the \(G^\mathrm{asym}\)-symmetry, an orthogonal equilibrium can be represented as the configuration point \(q=(\mathrm{Id},(0,R,0))\) with angular velocity \(\xi =(|\xi |,0,0)\). If \((M,A)\in G_q\subset G^\mathrm{asym}\), then
therefore, for this equilibrium, \(A\in \varGamma ^\mathrm{asym}\) must be of the form \({\text {diag}}(\pm 1,1,\pm 1)\) and \(M=A\det (A)\); that is, \(G^\mathrm{asym}_q=\{(A\det (A),A) \mid A={\text {diag}}(\pm 1,1,\pm 1)\}\) and as a group is isomorphic to the Abelian group \(\mathbb {Z}_2\times \mathbb {Z}_2\). In a similar way, we can obtain \(G_z\) and \(G_\mu \). This procedure can be applied to all the different relative equilibria, and the resulting groups are shown in Table 1.
The table above lists the different isotropy groups associated with one representative for each family of relative equilibria. Note that the isotropy groups can be used to classify the different families and give information about the possible bifurcation schemes, since using standard topological arguments a family of relative equilibria can only bifurcate from another one whenever there is a subconjugation relationship between their isotropy groups \(G_z\). For example, we see that the family \(\text {Par}_2\) with \(\xi \ne 0\) cannot bifurcate from \(\text {Orth}^1_2\) since points in the bifurcating branch must have stabilizers conjugated to a subgroups of the stabilizers of the original branch.
Remark 3.10
The fact that the bilinear forms \(\mathbf{Ar}\) and \(\mathbf{Sm}\) in both the orthogonal (3.11, 3.12) and parallel (3.15, 3.16) equilibria are diagonal is not been a coincidence. This subblocking property is due to the fact that the bases chosen for \({\mathfrak {g}}^\mathrm{asym}_\mu \) and \(\mathcal {V}_\mathrm{RIG}\) correspond to what is called an isotypic decomposition for which an invariant bilinear form necessarily has to block-diagonalize (see Theorems 2.5 and 3.5 of Golubitsky et al. 1988 for more details).
3.9 Bifurcations
In this subsection, we study the change in the stability regimes and bifurcation schemes for the different families of asymmetric relative equilibria.
Proposition 3.11
With the notation of Proposition 3.8, the family of orthogonal relative equilibria satisfying Lagrange stability conditions loses stability at the point \(R=R_\mathrm{crit}\), but no bifurcation occurs at that point.
Proof
The degeneracy of the Arnold or Smale form at a relative equilibrium is a necessary condition for the existence of a bifurcation (see the Appendix), but this condition is not enough, and a further local study must be done in order to detect the existence of a bifurcating branch. As we showed in the proof of Proposition 3.8, the only eigenvalue of \(\mathbf{Ar}\) and \(\mathbf{Sm}\) that can vanish if the Lagrange conditions are satisfied is \(S_1\), and this happens exactly when R attains the value \(R_\text {crit}\). We will now check, using the implicit function theorem, that at this point no bifurcating family exists. Equation (3.1) can be seen as a local map \(F:\mathbb {R}^6\rightarrow \mathbb {R}^6\) that characterizes relative equilibrium pairs \((\mathbf{R},\xi )\) as the set of points in \(\mathbb {R}^6\) such that \(F(\mathbf{R},\xi )=0\). The family of orthogonal equilibria is a family of solutions of \(F(\mathbf{R},\xi )=0\) of the form
parametrized by the value of \(R_2\). We can compute the differential of F evaluated at that point and consider the \(5\times 5\) block corresponding to the variables \(\xi _1,\xi _2,\xi _3,R_1,R_3\) leaving \(R_2\) as a parameter. After a lengthy computation, the determinant of this \(5\times 5\) block is
where \(K\ne 0\) is a constant. If \(\varDelta \ne 0\), then the implicit function theorem ensures that all the solutions of \(F(\mathbf{R},\xi )=0\) near \(R_2=RR_\mathrm{crit}\) can be parametrized by \(R_2\). That is, near that point the only relative equilibria are orthogonal. Therefore, bifurcating families of relative equilibria from the orthogonal family can only appear when \(\varDelta \) vanishes. Finally, it is easy to see that \(\varDelta \) does not have a zero at \(R_2=R_\text {crit}\), and so no bifurcation exists at that point.\(\square \)
Remark 3.12
The fact that \(S_1\) vanishes at \(R_\text {crit}\), but no bifurcation occurs at that point can also be interpreted in the following way. The square norm of the angular momentum as a function of R along the orthogonal family is given by the expression

Also, after some simplifications, \(S_1\) can be written as
Therefore, \(S_1=0\) implies that the square norm of the momentum map attains a critical value at \(R_2=R_\text {crit}\). Denote by \(\mu _\text {crit}\) this value. To understand what is happening at the point \(R_\text {crit}\), we will need to make some observations: The function \(C:T^*Q\rightarrow \mathbb {R}\) defined by \(C(z)=|\mathbf{J}(z)|^2\) induces a Casimir function \(\mathcal {C}\) on the reduced Poisson manifold \(T^*Q/\hbox {SO}(3)\) for which all the non-empty level sets \(\mathcal {C}^{-1}(a)\) are symplectic leaves. Moreover, the reduced Hamiltonian induced on \(\mathcal {C}^{-1}(a)\) by (2.5) has critical points when \(a >|\mu _\text {crit}|^2\) but no critical points if \(a <|\mu _\text {crit}|^2\). Since critical points of the reduced Hamiltonian restricted to symplectic leaves are relative equilibria, we can say from a geometric point of view that the orthogonal family, seen as a set of equilibria in the reduced space parametrized by the value of \(\mathcal {C}([z])\), undergoes a fold catastrophe as \(\mathcal {C}(z)\) crosses \(|\mu _\text {crit}|^2\). This behavior also appears in the numeric studies of O’Reilly and Tan (2004) where they find that the type Ia motion (equivalent to our Lagrangian orthogonal equilibrium) looses it stability as a critical distance is crossed.
In fact, the analysis done in the proof of Proposition 3.11 proves that the orthogonal family can only bifurcate when \(\varDelta =0\). If the Lagrange conditions are satisfied, we showed in Proposition 3.8 that \(8R_2^2+6I_1-15I_2+3>0\), but on the other hand, as \(I_2<\frac{1}{3}\), using (3.4) we have that \(\xi _1\ne 0\) for any value of \(R_2\). That is, \(\varDelta =0\) only if two moments of inertia are equal, this assumption being precisely the axisymmetric case that will be studied in Sect. 4.
We now study how the families of orthogonal and parallel equilibria bifurcate. Consider the family of orthogonal relative equilibria given by the representatives [see (3.4)]
Note that if \(3-9I_2>0\), this family contains elements for any value of \(R_2>0\), but if \(3-9I_2<0\) for \(R_2\) small enough the conditions are empty, exactly at the point \(\mathbf{R}=(0,R^*,0),\xi =(0,0,0)\) where
As we did in the proof of Proposition 3.11, we will need to use an appropriate version of the implicit function theorem to understand what happens at that point. The relative equilibrium conditions (3.1a) and (3.1b) can be rewritten as
and this can be thought as the zero level set of a local map \(F:\mathbb {R}^7\rightarrow \mathbb {R}^6\). This set of equations has as family of solutions given by
We will now use the implicit function theorem in order to study possible bifurcations. The matrix of partial derivatives with respect to \(\xi _1,\xi _2,\xi _3,R_1,R_2,R_3\) is
where \(*\) represents nonzero terms independent of \(\alpha \). In view of this matrix, the map F can only bifurcate at the three points \(\alpha =\alpha _1,\alpha _2,\alpha _3\) given by
The first bifurcation point corresponds \(\alpha =\alpha _1\) to an orthogonal family spinning around \(\mathbf{e}_1\) or \(\mathbf{e}_3\) and with \(\mathbf{R}\) aligned with \(\mathbf{e}_2\).

Sketch of the local bifurcations for the asymmetric body
The third bifurcation point \(\alpha =\alpha _3\) corresponds to an orthogonal family spinning around \(\mathbf{e}_3\) and with \(\mathbf{R}\) aligned with \(\mathbf{e}_2\). Finally, the second value \(\alpha =\alpha _2\) corresponds to the bifurcation of \(\text {Par}_2\) (\(\xi \ne 0\)) from \(\text {Par}_2\) (\(\xi =0\)) when \(R\parallel \xi \parallel \mathbf{e}_2\).
3.9.1 Bifurcation Schemes
A simple sketch of what happens when \(I_2>\frac{1}{3}\) is drawn in Fig. 3. If the orbital radius is large enough, we have an orthogonal family of relative equilibria with \(\xi \) aligned with \(\mathbf {e}_1\) and \({\mathbf{R}}\) aligned with \(\mathbf {e}_2\). This family is labeled as \(\text {Orth}^1_2\). Also, if the orbital radius is large enough, there is an additional orthogonal family with \(\xi \) aligned with \(\mathbf {e}_3\) and \({\mathbf{R}}\) aligned with \(\mathbf {e}_2\). This family is labeled as \(\text {Orth}^3_2\). As the radius R gets smaller and reaches its critical value \(R^*\) given by (3.17), both orthogonal families \(\text {Orth}^3_2\) and \(\text {Orth}^1_2\) meet. Moreover, this is a bifurcation point for the family of parallel equilibria spinning with \({\mathbf{R}}\) and \(\xi \) aligned with \(\mathbf{e}_2\) (labeled \(\text {Par}_2\)).
By a similar analysis (omitted here), we can obtain that the family \(\text {Par}_2\) also intersects with the family of conical equilibria in both the 12 and 23 planes (labeled \(\text {Obl}_{1,2}\) and \(\text {Obl}_{2,3}\)). All those bifurcation points are represented in Fig. 3. Each line represents a family of relative equilibria in phase space or equivalently a four-dimensional \(\hbox {SO}(3)\)-invariant submanifold of relative equilibria.
4 Axisymmetric Case
In this section, we are interested in the case satellite has an axis of symmetry. One of the seminal works studying this system is the article by Thomson (1962), where the steady motion of an axially symmetric satellite was investigated assuming that satellite’s center of mass described a prescribed circular Keplerian orbit, what we have called the restricted problem. In the relative equilibrium found in that reference, the axis of symmetry of the satellite was perpendicular to the orbital plane. In that configuration, the satellite can spin about its axis of symmetry with arbitrary velocity while still maintaining the circular orbit. The stability conditions for the attitude motion are also investigated. Later, Pringle (1964) and Likins and Roberson (1966) showed that other steady motions were also present in the restricted problem. We will call these solutions the Pringle–Likins hyperbolic and conical equilibria.
The unrestricted problem, where the attitude–orbit coupling is incorporated, was, to our knowledge, first examined in Stepanov (1969). Among other results, the stability criteria for some of the unrestricted problem’s counterparts to the Thomson and the Pringle–Likins hyperbolic equilibria are established. Also in that reference, it is suggested that the unrestricted problem’s counterparts to the Pringle–Likins conical equilibria could be examples of motions where the orbital plane of the satellite’s center of mass does not contain the center of the potential. However, the authors only provide an implicit description of those equilibria. Consequently, these and other questions concerning the existence and stability of steady motions for the unrestricted problem have so far remained open.
In Beck (1997), it is conjectured the existence of an upper bound for R in the conical family similar to the inequality stated in Proposition 3.1 for the asymmetric case, but this is not proved. In O’Reilly and Tan (2004), numerical continuation techniques are employed to follow the family of cylindrical equilibria until it bifurcates to other equilibria. The only bifurcations found are families of hyperbolic and conical equilibria for very small radius, like the ones found in the asymmetric case. This led them to affirm that those motions can only exist for small orbital radius as it happens for the conical equilibria for the asymmetric case.
In this section, we will show that the conical equilibria of Pringle–Likins have analogues in the unrestricted system and that they are not bound to small orbit. This contradicts the suggestion of O’Reilly and Tan (2004) based on numerical continuation experiments. Moreover, for a large region in the parameter space these motions are shown to be stable.
4.1 \(\hbox {SO}(3)\times S^1\) Symmetry
If the rigid body possesses an axis of symmetry, then the symmetry group \(G^\text {asym}\) introduced in Sect. 2.3 can be augmented with the group of rotations around that axis, realized by a right action of \(S^1\). If we choose a body-fixed orthogonal frame such that the first element corresponds to the symmetry axis, then the inertia tensor will have the diagonal form \({\mathbf{I}}={\text {diag}}(I_1,I_2,I_2)\) and, as in Remark 2.1, \(I_1+2I_2=1\).
We can define an action of the direct product \(\hbox {SO}(3)\times S^1=G^\mathrm{axi}_0\) on the configuration space Q by (in space coordinates)
where
The Lie algebra of \(G^\mathrm{axi}_0\) can be identified with the direct sum \(\mathbb {R}^3 \oplus \mathbb {R}\) in such a way that the adjoint action is given by \(\mathrm{ad}_{(\xi ,\eta )}(a,b)=(\widehat{\xi } a,0)\) for every \((\xi , \eta ),(a,b)\in {\mathfrak {g}}^\mathrm{axi}\).
In body coordinates, we have that the action is expressed as
therefore, the fundamental fields are
Finally, using this last expression and (2.2), it is easy to check that the locked inertia tensor is given by

The relative equilibria of the system under this symmetry group are similar to the ones described in Sect. 2.3. The center of the satellite will move along a cone with vertex at the center of the potential, while the satellite spins along its symmetry axis. If the relative equilibrium pair \(((\mathrm{Id},\mathbf{R}),(\xi ,\eta ))\in Q\times {\mathfrak {g}}^\mathrm{axi}\) is orthogonal in the sense that \(\mathbf{R}\cdot \xi =0\), then the center of mass of the satellite will orbit along a circle with center the origin of the potential gravitational field.
4.2 Discrete Symmetries
In Sect. 2.4, we enlarged the symmetry group using the additional symmetries of the inertia ellipsoid. In the axisymmetric setting, this will also happen. However, this time the resulting group will not be a direct product. Consider the matrix group
and the map \(\chi :\varGamma ^\mathrm{axi}\rightarrow \{1,-1\}\) defined by the determinant of the lower-right \(2\times 2\) submatrix. Topologically, \(\varGamma ^\mathrm{axi}\) is the disjoint union of four copies of \(S^1\), but as a group it is \(O(2)\times \mathbb {Z}_2\).
We can define the following left action of \(G^\mathrm{axi}:=\hbox {SO}(3)\times \varGamma ^\mathrm{axi}\) on Q, in body coordinates, as
The tangent lifted action is
Using that \(NR_\theta N^T=R_{\chi (N)\theta }\), the coadjoint action on the dual of its Lie algebra is
From the above expressions, one can check that the metric (2.2) and the potential (2.4) are invariant under the action of the group \(G^\mathrm{axi}\). This implies that \((Q,\langle \! \langle ,\rangle \! \rangle ,G^\mathrm{axi},V_2)\) is a \(G^\mathrm{axi}\)-symmetric simple mechanical system. Note that the connected component that contains the identity of \(G^\mathrm{axi}\) is \(G^\mathrm{axi}_0\) as defined before. The action of \(G^\mathrm{axi}\) on Q is locally free at \((B,\mathbf{R})\) if \(\mathbf{R}\) is not aligned with \(\mathbf{e}_1\), but note that otherwise there exists continuous isotropy.
4.3 Orthogonal Equilibria: Characterization
As we saw in Sect. 3.1, the relative equilibria for the \(G^\mathrm{axi}\)-action are the pairs \(((B,\mathbf{R}),(\xi ,\eta ))\in Q\times {\mathfrak {g}}^\mathrm{axi}\) at which the first variation of the augmented potential \(V_{(\xi ,\eta )}\) vanishes. Again, without loss of generality we can assume that \(B=\text {Id}\), and this gives the conditions
where \(\nabla _{\mathbf{R}} V_2(\mathbf{R})\) has been computed in (3.2).
As for the asymmetric case, if we assume \(\xi \cdot \mathbf{R}=0\), then conditions (4.1) are greatly simplified, and we will refer to this case as orthogonal equilibria. The case \(\xi \cdot \mathbf{R}\ne 0\) will be addressed in Sect. 4.4. Under the orthogonality assumption, we can distinguish different families of relative equilibria.
Proposition 4.1
Assume that a relative equilibrium \(((\mathrm{Id},\mathbf{R}), (\xi ,\eta ))\in Q\times {\mathfrak {g}}^\mathrm{axi}\) for the axisymmetric second-order model satisfies \(\xi \cdot \mathbf{R}=0\). Then up to translations by elements of \(G^\mathrm{axi}\), it belongs to one of the following cases
-
Cylindrical: There is \(R>0\) and \(\alpha \in \mathbb {R}\) such that
$$\begin{aligned} \xi =\begin{bmatrix}\xi _1 \\ 0 \\ 0 \end{bmatrix},\quad \mathbf{R}=\begin{bmatrix}0 \\ R \\ 0 \end{bmatrix},\quad |\xi |^2= \frac{2R^2+3-9I_2}{2R^5},\quad \eta =-\alpha \xi _1 . \end{aligned}$$(4.2) -
Hyperbolic: There is \(R>0\) and \(\theta \in S^1\), \(\theta \ne \frac{\pi }{2}\) such that
$$\begin{aligned} \xi \!=\!|\xi |\begin{bmatrix}\sin \theta \\ 0 \\ \cos \theta \end{bmatrix},\quad \mathbf{R}\!=\!\begin{bmatrix}0 \\ R \\ 0 \end{bmatrix},\quad |\xi |^2\!=\! \frac{2R^2+3-9I_2}{2R^5},\quad \eta =-\frac{I_2-I_1}{I_1}|\xi |\sin \theta . \end{aligned}$$(4.3) -
Isolated: There is \(R>0\) such that
$$\begin{aligned} \xi =\begin{bmatrix} 0 \\ \xi _2 \\ 0\end{bmatrix},\quad \mathbf{R}=\begin{bmatrix} R \\ 0 \\ 0\end{bmatrix}, \quad |\xi |^2= \frac{2R^2+3-9I_1}{2R^5},\quad \eta =0. \end{aligned}$$(4.4)
Proof
Using \(\xi \cdot \mathbf{R}=0\) in (4.1), we have
The first condition can be written as \({\mathbf{I}} {\xi }-I_1\mathbf{e}_1\eta =\lambda \xi \) which in matrix form is
There are several possibilities for the solutions of the above matrix equation.
-
If \(\lambda \ne I_1,I_2\), then the system has only one solution \(\xi =((I_1-\lambda )^{-1} I_1\eta ,0,0)\), and (4.5b) forces \(\mathbf{R}\) to be an eigenvector of the inertia matrix (see (3.2)). Using the orthogonality constraint, we have \(\mathbf{R}=(0,R\cos \theta ,R\sin \theta )\) for some angle \(\theta \). Using the \(G^\mathrm{axi}\)-action, we can assume \(\mathbf{R}=(0,R,0)\). We can write this solution depending on the parameters \(R>0\) and \(\alpha \in \mathbb {R}\) as in (4.2). The parameter \(\alpha \), introduced in (4.2), will be called the spinning quotient, and it is the quotient of the spinning velocity \(\eta \) with the orbital angular velocity \(\xi \). In Fig. 4, we have represented the behavior of a cylindrical equilibrium for different values of the spinning quotient \(\alpha \). Note that the condition \(\lambda \ne I_1,I_2\) is equivalent to \(\alpha \ne \frac{I_2-I_1}{I_1},\ 0\).
-
If \(\lambda =I_1\), the only solution is \(\eta =0\), \(\xi =(\xi _1,0,0)\). This is a solution without spinning. As in the cylindrical case using the available \(G^\mathrm{axi}\)-symmetry and the orthogonality constraint, we can assume that \(\mathbf{R}=(0,R,0)\). This solution corresponds to (4.2) with \(\alpha =0\).
-
If \(\lambda =I_2\) and \(\eta \ne 0\), we obtain the family of solutions \(\xi =(\frac{-I_1\eta }{I_2-I_1},\xi _2,\xi _3)\) where \(\xi _2,\xi _3\) are arbitrary. As in the cylindrical case using the \(G^\mathrm{axi}\)-symmetry and the orthogonality constraint, we can assume that \(\mathbf{R}=(0,R,0)\). Then, \(\xi =|\xi |(\sin \theta ,0,\cos \theta )\) and we get (4.3).
-
If \(\lambda =I_2\) and \(\eta =0\), then \(\xi =(0,\xi _2,\xi _3)\) for any \(\xi _2,\xi _3\), and (4.5b) implies that \(\mathbf{R}\) is an eigenvector of \(\mathbf{I}\). There are two possibilities
-
If \(\mathbf{R}=(0,R_2,R_3)\), we can assume \(\mathbf{R}=(0,R,0)\), but as \(\xi \cdot \mathbf{R}=0\) and then \(\xi =(0,0,\xi _3)\). This corresponds to a point in the hyperbolic family with either \(\theta =0\) or \(\theta =\pi \).
-
If \(\mathbf{R}=(R,0,0)\), using the \(S^1\) action, we can assume that \(\xi =(0,\xi ,0)\) and the condition (4.5b) gives the solution (4.4).\(\square \)
-

Cylindrical equilibria for different values of the parameter \(\alpha \)
Remark 4.2
Note that the points along the cylindrical family with \(\alpha =\frac{I_2-I_1}{I_1}\) are limiting cases (up to \(G^\mathrm{axi}\)-translations) of the family of hyperbolic equilibria when \(\theta \rightarrow \pm \frac{\pi }{2}\).
4.4 Non-Orthogonal Equilibria: Characterization
If we assume that \(\xi \cdot \mathbf{R}\ne 0\), we obtain new families of relative equilibria called parallel and conical equilibria for which in the latter the center of the orbit does not coincide with the center of the gravitational potential.
Proposition 4.3
Let \(((\mathrm{Id},\mathbf{R}), (\xi ,\eta ))\) be a relative equilibrium of the axisymmetric second-order model, and assume that \(\mathbf{R}\cdot \xi \ne 0\). Then up to a \(G^\mathrm{axi}\)-translations, there are two possibilities
-
Conical: There exist \(R>0\) and \(\psi \in S^1\), \(\psi \ne 0,\pm \frac{\pi }{2},\pi \) such that
$$\begin{aligned} \mathbf{R}= R(\cos \psi ,\sin \psi ,0),\quad \xi =(\xi _1,\lambda R\sin \psi ,0) \end{aligned}$$where \(\xi _1=3\frac{\cos \psi }{\lambda R^4}+\frac{I_1}{I_2-I_1}\eta \) and
$$\begin{aligned} \eta= & {} \frac{\cos \psi (I_2-I_1)}{2\sin ^2\psi \lambda I_1R^6}\left( (15\cos ^2\psi -9)(I_1-I_2)-8R^2+6R^2\cos ^2\psi \right. \nonumber \\&\quad \left. +\,2\lambda ^2R^7\sin ^2\psi \right) \end{aligned}$$(4.6)$$\begin{aligned} \lambda ^2= & {} \frac{\cos ^2\psi \left( 2R^2+(9-15\cos ^2\psi )(I_1-I_2)\right) ^2}{2R^7\sin ^2\psi \left( 2R^2+(3-9\cos ^2\psi )(I_1-I_2)\right) }. \end{aligned}$$(4.7) -
Parallel: \(\mathbf{R}\) is an eigenvector of \(\mathbf{I}\) satisfying \(1+\frac{3}{2R^2}\left( 1-3\left( \frac{\mathbf{R} \cdot \mathbf{IR}}{R^2}\right) \right) =0\), the spinning speed vanishes (\(\eta =0\)) and \(\xi \) is an arbitrary multiple of \(\mathbf{R}\).
Proof
From Eq. (4.1) and (3.2), if we take the cross product of (4.1b) with \(\mathbf{R}\) and subtract it from (4.1a), we get the condition
which in coordinates is
These two nonlinear equations can be written as the system
If the coefficients matrix is invertible, then the solution is given by
This relation and (4.1b)
forces either \(\mathbf{R}\cdot \xi =0\) or \(\mathbf{R}\parallel \xi \). The first case has already been covered in Proposition 4.1. If \(\mathbf{R}\parallel \xi \), then \(\eta =0\), and we reobtain the condition for parallel equilibria in the asymmetric case (Sect. 3.3), so we get the condition \(1+\frac{3}{2R^2}\left( 1-3\left( \frac{\mathbf{R} \cdot \mathbf{IR}}{R^2}\right) \right) =0\).
Assume now that the matrix of this system does not have full rank, that is, either \(R_3=R_2=0\) or there is some \(\lambda \in \mathbb {R}\) such that \(\xi _2=\lambda R_2\) and \(\xi _3=\lambda R_3\). If \(R_3=R_2=0\), since \(R=(*,0,0)\), then (4.8) forces either \(\mathbf{R}\cdot \xi =0\) or \(\mathbf{R}\parallel \xi \) as before, so there are no new cases. If \(\xi _2=\lambda R_2\) and \(\xi _3=\lambda R_3\) with \(\lambda =0\), then the solutions of the system are either \(\xi =(*,0,0),\ \mathbf{R}=(0,*,*)\) or \(\xi =(*,0,0),\ \mathbf{R}=(*,0,0)\) and again this does not offer new solutions.
Suppose now that \(\lambda \ne 0\). Using the \(S^1\)-action, we can set \(\mathbf{R}=(R_1,R_2,0)\). By the degeneracy assumption, \(\xi _2=\lambda R_2\) and \(\xi _3=\lambda R_3\), \(\xi _3=0\). The solution of the system is now
If we define the angle \(\psi \) by \(\mathbf{R}=(R\cos \psi ,R\sin \psi ,0)\), then the second component of the vector equation (4.8) is equivalent to
and \(\eta \) can be solved. Substituting this \(\eta \) in the third component of (4.8) gives \(A+B\lambda ^{-2}=0\) from which \(\lambda \) can be easily found. The exact expressions for both variables are given in (4.6) and (4.7). \(\square \)
For each radius R and \(\psi \in S^1\) (\(\psi \ne 0,\pm \frac{\pi }{2},\pi \)), there exists a conical equilibrium described by Proposition 4.3. To understand the behavior of this equilibrium, we can expand the expressions for large R, obtaining
Note that with this approximation, the orbit satisfies \(\mathbf{R}\cdot \xi \approx 0\), but if higher-order terms are taken into account, then
where the offset angle \(\varkappa \) is defined in (2.8).
In Fig. 5 we have represented both the conical and hyperbolic equilibria for different values of the corresponding parameters. In that figure the satellite is viewed from a reference frame that follows a Keplerian orbit.
Remark 4.4
Conical equilibria are orbits in a plane that does not contain the center of attraction. Although the offset is very small (\(\varkappa \) decays like \(R^{-2}\)), this small value allows for the existence of this family of equilibria.
Remark 4.5
In the case of three different moments of inertia, the conical orbits can exist only for very small radius where the second-order potential looses its physical validity (see Remark 3.6). However, the situation is completely different for the axisymmetric case in that the family of conical equilibria exists for arbitrary R.

Sketch of conical and hyperbolic equilibria for different values of the parameters \(\psi ,\theta \). In those figures, \({\mathbf {E}}_1 ,{\mathbf {E}}_2 ,{\mathbf {E}}_3 \) is an orthonormal frame following a circular orbit, \({\mathbf {E}}_2 \) always points toward the primary, \({\mathbf {E}}_1 \) is normal to the orbital plane, and \({\mathbf {E}}_3 \) is tangent to the circular orbit

Cylindrical, hyperbolic, conical, and isolated families of relative equilibria for the axisymmetric body. In the figures, O denotes the center of mass of the primary, the thick black line represents the orbit of the satellite, and the dotted line represents its axis of symmetry
Remark 4.6
The names of these families of equilibria are based on the surface that describes the symmetry axis of the body as it travels along the orbit (see Fig. 6 where the dotted line represents the symmetry axis of the body). In the classification introduced in O’Reilly and Tan (2004), cylindrical, hyperbolic, and conical equilibria are called type I, III, and IV, respectively. The solutions of type II are our parallel equilibria. It follows from the proof of Proposition 4.3 that parallel equilibria only exist for small R since the equations obtained for the derivation of this family are identical to those obtained for the parallel equilibria of the asymmetric case in Sect. 3.3. In particular, the bound (3.6) also holds for the parallel equilibria of the axisymmetric case.
Remark 4.7
The cylindrical, hyperbolic, and conical families all have analogues in the restricted problem, see Pringle (1964), Likins and Roberson (1966).
4.5 Cylindrical Equilibria: Stability
We will now study the family of cylindrical equilibria of the axisymmetric problem, where the satellite follows a circular orbit and in addition it spins with angular velocity parallel to the orbital angular velocity. Using (4.2), the metric and the angular momentum at the equilibrium point \((\mathrm{Id},\mathbf{R})\) are

therefore, the stabilizer of the momentum value \(\mu \in ({\mathfrak {g}}^\mathrm{axi})^*\) is
The Arnold form is
One possible choice for the reduced energy-momentum splitting is
The Smale form in this basis is diagonal and has entries
Using again Proposition 5.4 applied to the previous expressions, we get
Proposition 4.8
For large orbits satisfying
the cylindrical equilibrium with spinning quotient \(\alpha \in \mathbb {R}\) satisfying
is \(G^\mathrm{axi}_\mu \)-stable.
Remark 4.9
Note that for any \(I_1\) and \(I_2\), if \(\alpha \) is large enough, then the cylindrical equilibrium will be \(G^\mathrm{axi}_\mu \)-stable. This is the analogue of the fast top condition for the heavy top problem: the upright spinning equilibrium stable for high angular velocities.
Remark 4.10
Axisymmetric bodies can be classified as oblate when \(I_1>I_2\) or prolate when \(I_1<I_2\). Note that all cylindrical equilibria for oblate bodies satisfying \(\alpha >0\) are \(G^\mathrm{axi}_\mu \)-stable, and in this case, the large orbit condition (4.11) is satisfied for any R.
4.6 Hyperbolic Equilibria: Stability
According to the characterization (4.3) of the family of hyperbolic equilibria, the metric and the angular momentum at the equilibrium point are

Therefore, we have
and
With respect to this basis, the Arnold form is diagonal and has eigenvalues
We can choose the following basis of the subspace of internal variations
and after some computations \(\mathbf{Sm}\) takes diagonal form with eigenvalues
We can now state the following stability result for hyperbolic equilibria
Proposition 4.11
For large orbits satisfying
hyperbolic equilibria are \(G^\mathrm{axi}_\mu \)-stable for oblate bodies (\(I_1>I_2\)) and unstable for prolate bodies.
Proof
Using Proposition 5.4, we only need to check for the signs of the eigenvalues (4.13), since it is clear that the eigenvalues of the Arnold form (4.12) are always positive if \(\theta \ne \pm \frac{\pi }{2}\) and \(R>0\). The eigenvalue \(S_2\) in (4.13) is positive if R satisfies the large orbit condition (4.14). Note that \(S_1\) is the only eigenvalue that can change sign. In particular, it has the same sign as \((I_1-I_2)\), and therefore, if \(I_1>I_2\), the equilibrium is \(G^\mathrm{axi}_\mu \)-stable, and if \(I_1<I_2\) but R satisfies the large orbit condition, the equilibrium is unstable using Proposition 5.5. \(\square \)
Remark 4.12
Using the simple bound \(0<I_2<\frac{1}{2}\), we can check that the right-hand side of (4.14) is bounded above by 2. That is, R satisfies the hyperbolic large orbit condition (4.14) if \(R>\sqrt{2}\).
4.7 Conical Equilibria: Stability
Following as in previous sections, we now apply the reduced energy-momentum to the conical family. This results in very long computations but doable using a computer algebra software. Omitting here these details, the series expansion of the Arnold form is diagonal with eigenvalues
As for the Smale form, we obtain a \(2\times 2\) symmetric matrix with entries
being \(S_{12}\) the off-diagonal entry. To check for positive definiteness of this block, we use Sylvester’s criteria. Using again a series expansion, we obtain
and now using again Propositions 5.4 and 5.5, we obtain the following result.
Proposition 4.13
Consider a conical equilibrium with angle \(\psi \ne 0,\pm \frac{\pi }{2},\pi \). If R is large enough, then
-
If \(I_1 < I_2\) (prolate body), the conical equilibrium is \(G^\mathrm{axi}_\mu \)-stable.
-
If \(I_1 >I_2\) (oblate body) and \(4I_2>3I_1\), the conical equilibrium is unstable.
In the remaining cases, the reduced energy-momentum method is inconclusive.
4.8 Isolated Equilibria: Stability
Using the characterization (4.4) of the family of isolated equilibria, we get

Therefore, the angular momentum and its stabilizer are

Note that we also have
and this is precisely the kernel of the locked inertia tensor.
As the action of \(G^\mathrm{axi}\) at the equilibrium point \(q=(\mathrm{Id},\mathbf{R})\in Q\) is not locally free, we cannot apply the reduced energy-momentum method as described in Proposition 5.4. To study its stability, we will need the singular version stated in Proposition 5.6. As we have already computed \({\mathfrak {g}}^\mathrm{axi}_{q}\) and \({\mathfrak {g}}^\mathrm{axi}_\mu \), we can check that
satisfy the conditions of Proposition 5.6. After some substitutions, we find that \((\mathbf{d}^2 V_{(\xi ,0)}+\mathrm{corr}_{(\xi ,0)})\bigg |_{\Sigma }\) at the isolated equilibrium is diagonal with respect to the chosen basis and has eigenvalues
From these computations, we can obtain the following stability result.
Proposition 4.14
Consider an isolated equilibrium with a large orbit satisfying
Then
-
If \(I_1<I_2\) (prolate bodies), the equilibrium is \(G_\mu \)-stable.
-
If \(I_1>I_2\) and \(4I_2-3I_1>\frac{6I_2(I_1-I_2)}{R^2}\), the equilibrium is unstable.
For the remaining cases, the method is inconclusive.
4.9 Isotropy Subgroups
As we did in Sect. 3.8, we will use the different isotropy groups to classify the different families of relative equilibria for the axisymmetric problem. Additionally, this can be used to discard the existence of some bifurcations based on symmetry considerations. This classification is shown in Table 2.
Regarding \(\mathbf{Ar}\) and \(\mathbf{Sm}\), it is the case that the diagonal structures found in the cylindrical, hyperbolic, and conical case are again due to the fact that the different bases chosen had good isotypic properties. In fact, in the conical equilibrium we cannot, based on symmetry arguments, choose a basis in which \(\mathbf{Sm}\) is diagonal because \(G_z^\text {axi}\) acts trivially on \(\mathcal {V}_\mathrm{RIG}\), and therefore, there is only one isotypic block which is the whole space.
4.10 Bifurcations
Before we study the bifurcations of the axisymmetric equilibria, we must remark that the parametrization of hyperbolic relative equilibria (4.3) in terms of R and \(\theta \) is not one-to-one in the sense defined in the Appendix, since if we consider the point
and we translate it using \(({\text {diag}}(-1,-1,1),{\text {diag}}(1,1,-1))\in G^\mathrm{axi}\) we get
therefore, \((R,\theta )\) and \((R,-\theta )\) parametrize the same relative equilibrium up to a \(G^\mathrm{axi}\)-symmetry. Similarly, the transformation \(({\text {diag}}(1,-1,-1),{\text {diag}}(-1,1,1))\in G^\mathrm{axi}\) is equivalent to the map \((R,\theta )\mapsto (R,\pi -\theta )\). It can be checked that if we restrict \(\theta \in [0,\frac{\pi }{2})\), then relative equilibria with different \(\theta \) are not \(G^\mathrm{axi}\)-related. The same problem happens along the conical family: In order to have injectivity, we must restrict \(\psi \in (0,\frac{\pi }{2})\). Nevertheless, as we will see it is clearer to study the bifurcation problem ignoring this injectivity issue and considering the set of hyperbolic equilibria as a set parametrized by \(\theta \in S^1\) and the orbital radius R, and the set of conical equilibria as a set parametrized by \(\psi \in S^1\) with \(\psi \ne 0,\pm \frac{\pi }{2},\pi \) and the orbital radius R.
Although the defining Eqs. (4.6) and (4.7) for a conical equilibrium with a given \(\psi \) are not defined for \(\psi =0\), we can consider the limit of the family of conical equilibria with fixed R as \(\psi \rightarrow 0\). This limit converges to the point \((\text {Id},\mathbf{R}, (\xi , \eta ))\) with
where \(|\xi |^2=\frac{2R^3+3-9I_1}{2R^5}\). Note that this point lies in what we have called the isolated family (4.4). Analogously, the limiting point \(\psi \rightarrow \pi \) corresponds to \(\mathbf{R}= (R,0,0),\quad \xi =(0,-|\xi |,0),\quad \eta =0\) a relative equilibrium related to (4.15) by the symmetry \(({\text {diag}}(1,-1,-1),{\text {diag}}(1,-1,-1))\in G^\mathrm{axi}\).
In a similar way, it can be shown that the limit when \(\psi \rightarrow \frac{\pi }{2}\) is
where \(\alpha _{\text {conic}}=\frac{-(I_1-I_2)(8R^2+9I_1-9I_2)}{I_1(2R^2+9I_1-9I_2)}\). Note that this point is a cylindrical equilibrium with spinning rate \(\alpha =\alpha _{\text {conic}}\). The point \(\psi \rightarrow -\frac{\pi }{2}\) is related to \(\psi \rightarrow \frac{\pi }{2}\) using the element \(({\text {diag}}(-1,-1,1),{\text {diag}}(1,1,-1))\in G^\mathrm{axi}\).
To start the bifurcation analysis for axisymmetric relative equilibria, we will study what happens to the cylindrical family when R is large enough and we vary the spinning quotient \(\alpha \) [see (4.2)]. As we previously, we need to find the points for which the Arnold or the Smale forms become degenerate, since these are necessary conditions for the existence of bifurcations. We will study separately what happens in the oblate and prolate cases.
4.10.1 Oblate
In this case, we will fix the orbital radius \(R=|\mathbf{R}|\) to a large enough value and will study the existence of the different kinds of relative equilibria. The different transitions are sketched in Fig. 7 where a thick solid line means \(G^\mathrm{axi}_\mu \)-stability, a dotted line means instability, and a dashed line means that the methods employed give inconclusive results. In that figure, each line represents a connected component of each family of relative equilibria in \(T^*Q\) with the orbital radius \(R=|\mathbf{R}|\) fixed to a large enough value.

Families of relative equilibria in phase space for an oblate body
Since in the oblate case \(I_1>I_2\), then for any positive \(\alpha \), the cylindrical equilibrium is \(G^\mathrm{axi}_\mu \)-stable according to Proposition 4.8. Note that if \(\alpha \) is decreased, we eventually arrive at the point \(P_9\) where \(\alpha =0\) and according to (4.2) the spinning velocity \(\eta \) vanishes, but the cylindrical equilibrium is still \(G^\mathrm{axi}_\mu \)-stable. If \(\alpha \) is further decreased, we will reach the point \(P_1\) where \(I_1(1+\alpha )-I_2=0\). At this point, \(A_1\) [see (4.10)] becomes negative, and therefore, the cylindrical family becomes unstable because there is only one negative eigenvalue of \(\mathbf{Ar}\) and \(\mathbf{Sm}\) (Proposition 5.5).
The cylindrical equilibrium will remain unstable until we arrive at \(P_5\) where \(S_1=0\) (\(I_1(4+\alpha )-4I_2\approx 0\)). After this point, two eigenvalues are negative, and therefore, we cannot say anything about its stability without recurring to a numerical analysis of the linearized system, and so the inconclusive region starts at that point.
Note that according to Remark 4.2 the point \(P_1\), for which \(I_1(1+\alpha )-I_2=0\), is a relative equilibrium belonging to the cylindrical family and corresponding to a limit point of the hyperbolic family when \(\theta \rightarrow \frac{\pi }{2}\). Recall that using Proposition 4.11, the hyperbolic family is stable.
The other bifurcation candidate along the cylindrical family is \(P_5\), where \(S_1\) changes sign. This happens exactly when
but this is limit point of the conical family when \(\psi \rightarrow \pm \frac{\pi }{2}\) [see (4.16)].
Now we consider what happens if we move along the conical family changing the value of \(\psi \): For \(\psi \rightarrow \frac{\pi }{2}\), the limiting equilibrium point belongs to the cylindrical family. As \(\psi \) becomes smaller, the body starts to orbit in a higher plane, and the plane of the orbit now does not contain the center of attraction [see (4.9)]. At the same time, the spinning velocity \(\eta \) increases.
The offset \(\varkappa \) [see (2.8)] achieves a maximum for \(\psi =\frac{\pi }{4}\) and passed that value the orbit plane starts to descend until \(\psi \rightarrow 0\) at the point \(P_6\) which belongs to the isolated family (4.4) and for which the offset \(\varkappa =0\) vanishes again. If \(\psi \) is further decreased, the orbit plane lowers down and the body describes again a cone. For \(\psi \rightarrow -\frac{\pi }{2}\) (point \(P_7\)), we have again a cylindrical equilibrium, and this point is the image of \(P_5\) by translating with a \(G^\mathrm{axi}\)-symmetry.
In general, the stability along the conical and isolated equilibria will depend on the sign of \(4I_2-3I_1\). If this quantity is positive in both cases, we will have only one negative eigenvalue, and using Proposition 5.5, we can conclude instability. But if \(4I_2-3I_1<0\), we will have two negative eigenvalues in both cases and the method will be inconclusive.
Finally, if we move along the hyperbolic equilibria, it follows from Proposition 4.11 that the family is \(G^\mathrm{axi}_\mu \)-stable and the only bifurcation candidates are \(\theta \rightarrow \pm \frac{\pi }{2}\) where the bifurcation to hyperbolic and cylindrical families occur. Note that according to (4.3), when \(\theta =0\), the spinning velocity \(\eta \) vanishes, corresponding to the point \(P_2\).
The points \(P_3,P_4,P_7,P_8\), and \(P_{10}\) are \(G^\mathrm{axi}\)-related to \(P_3,P_2,P_5,P_6\), and \(P_9\), respectively, and therefore, they have the same dynamical properties as their \(G^\mathrm{axi}\)-counterparts.
4.10.2 Prolate
If the body is prolate (\(I_1<I_2\)), the bifurcation diagram is very similar as the previous one. The hyperbolic and the conical family bifurcate from the cylindrical family as \(\alpha \) is varied, but the difference is that now the bifurcation point with largest \(\alpha \) is \(P_5\) and not \(P_1\). As both bifurcations happen at positive \(\alpha \), the non-spinning point \(P_9\) lies after the hyperbolic bifurcation.
In this prolate case, the hyperbolic equilibria are now unstable and the bifurcation diagram is shown in Fig. 8 where we have used the same notation as for the oblate case.

Families of relative equilibria in phase space for a prolate body
5 Conclusions
For an asymmetric satellite, we have found a complete analytic description of all the possible families of relative equilibria. For small orbital radius, we notice the appearance of counterintuitive solutions that we call conical equilibria (see Proposition 3.4). These can be justified by a misuse of the second-order approximation, which is only valid for large distances. Although the existence of conical equilibria was already discussed in Wang et al. (1992), to the best of our knowledge, no analytical treatment has been done before in the low-orbit regime. Moreover, using the reduced energy-momentum method, we have obtained precise stability conditions for the orthogonal equilibria (Proposition 3.8), and in Sect. 3.9, we have detailed the possible bifurcations among the different families of relative equilibria.
For an axisymmetric satellite, we have also found a complete analytic description of all the possible relative equilibria (Propositions 4.1 and 4.3). We have shown that in this case non-orthogonal equilibria exist for any value of the orbital radius. This conclusion contradicts previous studies (O’Reilly and Tan (2004)) based on numerical continuation stating that non-orthogonal equilibria could exist only for very small values of the orbital radius. Again, using the reduced energy-momentum method and symmetry considerations, we have described the stability of the different families of relative equilibria, and in Sect. 4.10, we have described all the possible bifurcations among them.
References
Beck, J.: Relative equilibria of a rigid satellite in a central gravitational field. PhD thesis, Air Force Institute of Technology (1997)
Golubitsky, M., Schaeffer, D., Stewart, I.: Singularities and Groups in Bifurcation Theory, vol. 2. Springer, Berlin (1988)
Lagrange, J.L.: Théorie de la libration de la lune, et des autres phénomenes qui dépendent de la figure non sphérique de cette planete. Nouv. Mém. Acad. R. Sci. Berlin 1, 203–309 (1780)
Likins, P., Roberson, R.: Uniqueness of equilibrium attitudes for earth-pointing satellites. J. Astronaut. Sci. 13, 87 (1966)
Marsden, J., Ratiu, T.: Introduction to Mechanics and Symmetry. Springer, Berlin (2002)
Marsden, J.: Lectures on Mechanics. Cambridge University Press, Cambridge (1992)
Meirovitch, L.: Methods of Analytical Dynamics. McGraw-Hill, New York (1970)
O’Reilly, O., Tan, M.: Steady motions of an axisymmetric satellite: an atlas of their bifurcations. Int. J. Non-Linear Mech. 39(6), 921–940 (2004)
Patrick, G.: Relative equilibria in Hamiltonian systems: the dynamic interpretation of nonlinear stability on a reduced phase space. J. Geom. Phys. 9(2), 111–119 (1992)
Patrick, G.: Relative equilibria of hamiltonian systems with symmetry: linearization, smoothness, and drift. J. Nonlinear Sci. 5(5), 373–418 (1995)
Pringle Jr, R.: Bounds on the librations of a symmetrical satellite. AIAA J. 2(5), 908–912 (1964)
Rodríguez-Olmos, M.: Stability of relative equilibria with singular momentum values in simple mechanical systems. Nonlinearity 19(4), 853–877 (2006)
Simo, J., Lewis, D., Marsden, J.: Stability of relative equilibria. Part I: the reduced energy-momentum method. Arch. Ration. Mech. Anal. 115(1), 15–59 (1991)
Stepanov, S.I.: On the steady motions of a gyrostat satellite. J. Appl. Math. Mech. 33(1), 121–126 (1969)
Thomson, W.: Spin stabilization of attitude against gravity torque. J. Astronaut. Sci. 9(9), 31–33 (1962)
Wang, L.S., Krishnaprasad, P.S., Maddocks, J.H.: Hamiltonian dynamics of a rigid body in a central gravitational field. Celest. Mech. Dyn. Astron. 50(4), 349–386 (1990)
Wang, L.S., Maddocks, J.H., Krishnaprasad, P.S.: Steady rigid-body motions in a central gravitational field. J. Astronaut. Sci. 40(4), 449–478 (1992)
Acknowledgments
The authors would like to acknowledge the financial support of the Ministerio de Ciencia e Innovación (Spain), project MTM2011-22585 and AGAUR, project 2009 SGR:1338. M. Teixidó-Román also thanks the support of a FI-Agaur Ph.D. Fellowship. M. Rodríguez-Olmos thanks the support of the EU-ERG Grant “SILGA.”
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Eva Kanso.
Appendices
Appendix 1: Hamiltonian Relative Equilibria
Let \((Q,\langle \! \langle \cdot ,\cdot \rangle \! \rangle )\) be a Riemannian manifold (the configuration manifold), G a compact Lie group that acts by isometries on Q (the symmetry group) and \(V\in C^\infty (Q)\) a G-invariant function (the potential energy). With these data, we can construct a symmetric Hamiltonian system on \(T^*Q\), equipped with its canonical symplectic form \(\omega =-\mathbf{d}\theta \), in the following way: The potential energy V can be lifted to \(T^*Q\), and we will denote this lifted function also by V. The Riemannian metric on Q induces an inner product on each cotangent fiber \(T^*_qQ\), \(q\in Q\). Then, the Hamiltonian is defined as
The G-action on Q induces a cotangent-lifted Hamiltonian action on \(T^*Q\) with associated equivariant momentum map \(\mathbf{J}:T^*M\rightarrow {\mathfrak {g}}^*\) defined by
where \(\xi _Q\) is the fundamental vector field on Q associated with the generator \(\xi \in {\mathfrak {g}}\) and is defined by
Analogously, \(\xi _{T^*Q}\) is the fundamental vector field of the cotangent-lifted action on \(T^*Q\). This momentum map is \(\text {Ad}^*\)-equivariant in the sense that \(\mathbf{J}(g\cdot p_q)=\mathrm{Ad}_{g^{-1}}^*(\mathbf{J}(p_q))\) for every \(p_q\in T_q^*M\), \(g\in G\).
The Hamiltonian h is G-invariant for this lifted action (this follows from the invariance of the metric and of V). Therefore, due to Noether’s theorem, \(\mathbf{J}\) is conserved for the Hamiltonian dynamics associated with h. The quadruple \((Q,\langle \! \langle \cdot ,\cdot \rangle \! \rangle ,G,V)\) is called a symmetric simple mechanical system.
Let \((Q,\langle \! \langle \cdot ,\cdot \rangle \! \rangle ,G,V)\) be a symmetric simple mechanical system. A relative equilibrium is a point in phase space \(p_q\in T^*Q\) such that its dynamical evolution lies inside a group orbit for the cotangent-lifted action. This amounts to the existence of a generator \(\xi \in {\mathfrak {g}}\) such that the evolution of \(p_q\) is given by \(t\mapsto e^{t\xi }\cdot p_q\). The element \(\xi \) is called the angular velocity of the relative equilibrium. A useful characterization of relative equilibria in simple mechanical systems is given by the following result.
Theorem 5.1
(Marsden 1992; Marsden and Ratiu 2002) A point \(p_q\in T^*Q\) of a symmetric simple mechanical system \((Q,\langle \! \langle \cdot ,\cdot \rangle \! \rangle ,G,V)\) is a relative equilibrium with velocity \(\xi \in {\mathfrak {g}}\) if and only if the following conditions are verified
-
1.
\(p_q = \langle \! \langle \xi _Q(q) , \cdot \rangle \! \rangle \).
-
2.
q is a critical point of
 ,
,
 ,
,where  is defined by
is defined by  . Moreover, the momentum \(\mu =\mathbf{J}(p_q)\in {\mathfrak {g}}^*\) of the relative equilibrium is given by
. Moreover, the momentum \(\mu =\mathbf{J}(p_q)\in {\mathfrak {g}}^*\) of the relative equilibrium is given by 
That is, any relative equilibrium is determined by a configuration-velocity pair \((q,\xi )\in Q\times {\mathfrak {g}}\) satisfying \(\mathbf{d}V_\xi (q)=0\). The map  is called the locked inertia tensor, while the function \(V_\xi \) is called the augmented potential.
is called the locked inertia tensor, while the function \(V_\xi \) is called the augmented potential.
Note that if \((q,\xi )\) is a relative equilibrium pair, by G-invariance of the Hamiltonian vector field \(t\mapsto g\cdot (e^{t\xi }\cdot p_q)=e^{t\mathrm{Ad}_g\xi }\cdot (g\cdot p_q)\) is also an integral curve; that is, for each \(g\in G\), if \((q,\xi )\) is a relative equilibrium pair, then \((g\cdot q,\mathrm{Ad}_g\xi )\) is also a relative equilibrium pair.
1.1 The Reduced Energy-Momentum Method
The generally adopted notion of stability for relative equilibria of symmetric Hamiltonian systems is that of \(G_\mu \)-stability, introduced in Patrick (1992), and that we now review in the context of symmetric simple mechanical systems. This notion is closely related to the one of the Lyapunov stability of the induced Hamiltonian system on the reduced phase space.
Definition 5.2
Let \((Q,\langle \! \langle \cdot ,\cdot \rangle \! \rangle ,G,V)\) be a symmetric simple mechanical system and \(p_q\in T^*Q\) a relative equilibrium with momentum value \(\mu =\mathbf{J}(p_q)\). Let \(G_\mu \) be the stabilizer of \(\mu \in {\mathfrak {g}}^*\) for the coadjoint action of G in \({\mathfrak {g}}^*\). We say that \(p_q\) is \(G_\mu \)-stable if for every \(G_\mu \)-invariant neighborhood \(U\subset T^*Q\) of the orbit \(G_\mu \cdot p_q\) there exists a neighborhood O of \(p_q\) such that the Hamiltonian evolution of O lies in U for all time.
In this section, we outline the implementation of the reduced energy-momentum method following Simo et al. (1991). This method is designed for simple mechanical systems since it incorporates all of their distinguishing characteristics with respect to general Hamiltonian systems. Relative equilibria pairs \((q,\xi )\) besides being critical points of the augmented potential can also be described as relative equilibria position-momentum pairs \((q,\mu )\in Q\times {\mathfrak {g}}^*\), where  . These pairs \((q,\mu )\) are precisely the critical points of the amended potential
. These pairs \((q,\mu )\) are precisely the critical points of the amended potential

The study of the augmented potential \(V_\xi \) can only give rough stability conditions, and a better function to study in order to determine the stability of a relative equilibrium is the amended potential \(V_\mu \). From now on, we will need to assume that the isotropy, or stabilizer, \(G_q\) of the base point of the relative equilibrium is discrete.
Proposition 5.3
(Patrick 1992) Given a relative equilibrium \(p_q\) with momentum \(\mu \) and \(G_q\) discrete, definiteness of the bilinear form \(\mathbf{d}^2 V_\mu (q)\bigg |_{\mathcal {V}}\) where \(\mathcal V=\{v\in T_qQ\ |\ \langle \! \langle v,\eta _Q\rangle \! \rangle =0 \quad \forall \eta \in {\mathfrak {g}}_\mu \}\) implies \(G_\mu \)-stability.
An additional benefit of the reduced energy-momentum method is to further exploit the symmetry properties of \(V_\mu \) and decompose the admissible variation space \(\mathcal V\) into two subspaces
in such a way that \(\mathbf{d}^2V_\mu \) block-diagonalizes.
Let \({\mathfrak {g}}_\mu ^\perp \subset {\mathfrak {g}}\) be the orthogonal complement of \({\mathfrak {g}}_\mu \) with respect to  . We define
. We define

(an interpretation of these spaces can be found in Marsden 1992). The Arnold form \(\mathbf{Ar}:{\mathfrak {g}}_\mu ^\perp \times {\mathfrak {g}}_\mu ^\perp \rightarrow \mathbb {R}\) is the bilinear form defined as the restriction of the second variation \(\mathbf{d}^2 V_\mu \) to \(\mathcal {V}_\mathrm{RIG}\cong {\mathfrak {g}}_\mu ^\perp \). It can be shown that the Arnold form is independent of the potential and can be written as

If the Arnold form is non-degenerate, it can be shown that \(\mathcal V=\mathcal {V}_\mathrm{RIG}\oplus \mathcal {V}_\mathrm{INT}\). In that case, sufficient conditions for stability are given by the following result.
Proposition 5.4
(reduced energy-momentum method Simo et al. 1991) Given a relative equilibrium \(p_q\) with \(G_q\) discrete, then
-
If \(\dim G < \dim Q\), then positive definiteness of both \(\mathbf{Sm}:=\mathbf{d}^2 V_\mu \bigg |_{\mathcal {V}_\mathrm{INT}}\) and \(\mathbf{Ar}\) implies \(G_\mu \)-stability of the relative equilibrium.
-
If \(\dim G=\dim Q\), then definiteness (positive or negative) of \(\mathbf{Ar}\) implies \(G_\mu \)-stability of the relative equilibrium.
The bilinear form \(\mathbf{Sm}:\mathcal {V}_\mathrm{INT}\times \mathcal {V}_\mathrm{INT}\rightarrow \mathbb {R}\) is known in the literature as the Smale form. The reduced energy-momentum method can also be used to study the linearized dynamics near a relative equilibrium, thereby offering also instability conditions. Our main instability result will be the following.
Proposition 5.5
Consider a relative equilibrium \(p_q\). If the total number of negative eigenvalues of \(\mathbf{Sm}\) and \(\mathbf{Ar}\) is odd, then the relative equilibrium is unstable.
Proof
We will combine symplectic eigenvalue analysis and the reduced energy-momentum splitting. The linearized vector field with respect to a symplectic slice (see Patrick 1995) is an infinitesimally symplectic transformation with eigenvalues coming in n-tuples. This implies that if \(\lambda =a+bi\) is a simple eigenvalue of this linearized field, then \(\{\bar{\lambda },-\lambda ,-\bar{\lambda }\}\) are the companion eigenvalues completing a quadruple. If \(a\ne 0\) and \(b\ne 0\), all the four eigenvalues are different and their product is \(|\lambda |^4\). If \(a=0\), then the eigenvalue pair is \(\{\lambda ,\bar{\lambda }\}\) and their product is \(|\lambda |^2\), but if \(b=0\), then the eigenvalue pair is \(\{\lambda ,-\lambda \}\) and the product is \(-|\lambda |^2\). Therefore, if the linearized vector field has negative determinant, then it must have a real eigenvalue implying instability. Additionally, it can be shown (see Marsden 1992) that the splitting (5.1) block-diagonalizes the symplectic form. Moreover, the sign of the determinant of the linearized field has to be equal to the sign of the determinant of \(\mathbf{d}^2 V_\mu \bigg |_{\mathcal {V}}\). Thus, if \(\mathbf{d}^2 V_\mu \bigg |_{\mathcal {V}}\) has negative determinant, then the relative equilibrium is unstable. But, the reduced energy-momentum method block-diagonalizes \(\mathbf{d}^2 V_\mu \bigg |_{\mathcal {V}}\) into \(\mathbf{Sm}\) and \(\mathbf{Ar}\) and the hypothesis implies that the determinant of \(\mathbf{d}^2 V_\mu \bigg |_{\mathcal {V}}\) being negative is equivalent to the total number of negative eigenvalues of \(\mathbf{Sm}\) and \(\mathbf{Ar}\) being odd. \(\square \)
Bifurcations of relative equilibria. By a family of relative equilibria of a symmetric simple mechanical system, we will mean the image of a map \(\psi :\mathbb {R}^k\rightarrow T^*Q\) such that for each \(x\in \mathbb {R}^k\) the point \(\psi (x)\) is a relative equilibria and if \(x\ne y\) then \(\psi (x)\) and \(\psi (y)\) are not G-related.
Combining the reduced energy-momentum and the results of Patrick (1995), it can be shown that if \(p_q\in T^*Q\) is a relative equilibrium with discrete stabilizer such that both the Arnold form and the Smale form are non-degenerate, then there is a family of dimension \(\dim G_\mu \) of relative equilibria containing \(p_q\) and all the relative equilibria near \(p_q\) lie in that family.
Two families \(\psi _1,\psi _2\) are different if there are not x, y such that \(\psi _1(x)\) and \(\psi _2(y)\) are G-related. The previous result implies that at a bifurcation point, the Arnold form or the Smale form must be degenerate. Therefore, the points which are candidates for the existence of a bifurcation are those points at which at least one of these forms becomes degenerate. However, in order to decide whether actually a bifurcation happens at one of these points a local study around each candidate by other methods is needed.
Singular Reduced Energy-Momentum Method (case of Q -isotropy only). As the action of \(G^\mathrm{axi}\) on the isolated equilibria points of the axisymmetric problem is not locally discrete, we cannot apply the reduced energy-momentum method described before. We will use the singular reduced energy-momentum method developed in Rodríguez-Olmos (2006) to cover that case. However, for our purposes, we will only need a particular version of the method that we will briefly outline. Let \((Q,\langle \! \langle ,\rangle \! \rangle ,G,V)\) be a symmetric simple mechanical system and \(p_q\in T^*Q\) a relative equilibrium with \({\mathfrak {g}}_{p_q}=\{0\}\), and \({\mathfrak {g}}_q\ne \{0\}\). Define the subspaces
-
\({\mathfrak {t}}\subset {\mathfrak {g}}\) such that \({\mathfrak {g}}={\mathfrak {g}}_q\oplus {\mathfrak {g}}_\mu \oplus {\mathfrak {t}}\) and \({\mathfrak {g}}_\mu \perp {\mathfrak {t}}\) with respect to
 .
. -
\(\mathbf{S}=({\mathfrak {g}}\cdot q)^\perp \subset T_qQ\) with respect to \(\langle \! \langle \cdot ,\cdot \rangle \! \rangle _q\).
-
\({\mathfrak {q}}^\mu :=\{\gamma \in {\mathfrak {t}}\mid \langle \mathrm{ad}^*_\gamma \mu ,\xi \rangle =0,\quad \forall \xi \in {\mathfrak {g}}_q\}\)
-
 where \(\mathbb {P}:{\mathfrak {g}}^*\rightarrow {\mathfrak {g}}_\mu ^*\oplus {\mathfrak {t}}^*\) is the linear projection and
where \(\mathbb {P}:{\mathfrak {g}}^*\rightarrow {\mathfrak {g}}_\mu ^*\oplus {\mathfrak {t}}^*\) is the linear projection and  is the directional derivative of
is the directional derivative of  with direction \(v\in T_qQ\).
with direction \(v\in T_qQ\). -
\(\Sigma :=\{\xi _Q(q)+a\mid \xi \in {\mathfrak {q}}^\mu ,\quad a\in \mathbf{S}\}\).
 .
. where
where  is the directional derivative of
is the directional derivative of  with direction
with direction With these definitions, the analogue of Proposition 5.3 is
Proposition 5.6
(Theorem 4.1 of Rodríguez-Olmos 2006) Let \(p_q\in T^*Q\) be a relative equilibrium with configuration-velocity pair \((q,\xi )\in Q\times {\mathfrak {g}}\). Assume that \({\mathfrak {g}}_{p_q}=\{0\}\) and \(\dim (G\cdot q)<\dim (M)\).
If \((\mathbf{d}^2_q V_\xi +\mathrm{corr}_\xi (q))\bigg |_{\Sigma }\) is positive definite, then the relative equilibrium is \(G_\mu \)-stable.
Appendix 2: Numerical Linearization Around a Relative Equilibrium
Let \(p_q\in T^*Q\) be a relative equilibrium of a symmetric simple mechanical system \((Q,\langle \! \langle \cdot ,\cdot \rangle \! \rangle ,G,V)\). Fix a \(G_{p_q}\)-invariant splitting \(\ker T_{p_q}\mathbf{J}=T_{p_q}(G_\mu \cdot p_q)\oplus N\). The subspace N is a symplectic vector subspace of \(T_{p_q}(T^*Q)\), usually called a symplectic slice at \(p_q\). The linearization of the Hamiltonian system (see Patrick 1995) at the relative equilibrium \(p_q\) is given by
where \(\Omega _N\) is the symplectic form of the symplectic slice N. The linearization L provides a simple test for instability: If L has an eigenvalue with positive real part, then \(p_q\) is an unstable relative equilibrium.
We will use a numeric approximation to the linearization in two cases where the reduced energy-momentum method was inconclusive or yielded intractable algebraic expression.
1.1 Parallel Equilibria
Fix the point (3.14). Identifying \(T_{p_q} (T^*Q)\) with \(\mathbb {R}^{6}\times \mathbb {R}^6\cong \mathbb {R}^{12}\), we can choose the following base for the symplectic slice N
With respect to this basis, the matrix expression of the linearization is
Using a computer algebra system, one can compute the eigenvalues of this matrix for any value of the parameters \(I_1,I_2,I_3,\xi \). For example, for \(I_1=0.2\), \(I_2=0.35\), \(I_3=0.45\), and \(\xi =0.5\), L has two real eigenvalues with positive real part. Therefore, for those values, the parallel equilibrium is unstable. We believe that this is true for all values of the parameters, but we do not have a formal proof of this statement.
1.2 Asymmetric Conical Equilibria
In this case, the computations are more involved. As a concrete case, we fix the conical relative equilibrium given by the point \(\mathbf{R}=(0.16,0.11,0)\) with angular velocity \(\xi =(-3.61,-48.03,0)\). Using a computer algebra system, we can check that at that point we can choose as a basis for N the columns of the following matrix
Then, the matrix expression for the linearization is
This matrix has one real eigenvalue with positive real part, and hence, the relative equilibrium is unstable.
Rights and permissions
About this article

Cite this article
Muñoz-Lecanda, M., Rodríguez-Olmos, M. & Teixidó-Román, M. A Hamiltonian Study of the Stability and Bifurcations for the Satellite Problem. J Nonlinear Sci 25, 1347–1390 (2015). https://doi.org/10.1007/s00332-015-9257-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00332-015-9257-6