
Abstract
The interplay between local dynamics and dispersal rates in discrete metapopulation models for homogeneous landscapes is studied. We introduce an approach based on scalar dynamics to study global attraction of equilibria and periodic orbits. This approach applies for any number of patches, dispersal rates, or landscape structure. The existence of chaos in metapopulation models is also discussed. We analyze issues such as sensitive dependence on the initial conditions or short/intermediate/long term behaviours of chaotic orbits.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The impact of spatial structure in the study of biological populations has been studied from theoretical, empirical, and applied perspectives (Franco and Ruiz-Herrera 2015; Hanski and Gilpin 1997; Tilman and Kareiva 1997). The habitat of most species is usually fragmented due to environmental factors such as climate, light, predation risk or resource availability, and, in some situations, due to some human activities such as harvesting, culling, or the creation of marine protected areas. On the other hand, spatial structure has deep implications in the conservation or extinction of endangered species (Earn et al. 2000; Earn and Levin 2006). Nowadays, understanding the precise implications of spatial fragmentation is a crucial topic in population dynamics. To approach this problem, theoretical ecologists have proposed a broad variety of metapopulation models, where a metapopulation is a collection of local subpopulations connected by dispersal or migration. In the present paper, we analyze a couple map lattice model in order to study several aspects of metapopulation dynamics, specifically, synchronization, global stability, and chaotic dynamics. This model has been extensively studied in the ecological literature (Cazelles et al. 2001; Gyllenberg et al. 1993; Hastings 1993; Kirkland et al. 2006; Wysham and Hastings 2008; Yakubu and Castillo-Chavez 2002), and in many other contexts with no biological significance (Anteneodo et al. 2003; Monte et al. 2004; Manrubia and Mikhailov 2000). In our analysis, transient dynamical behaviors play an important role. As was emphasized in Hastings (2004), transient dynamics, behaviors of a dynamical system that are not the final behavior, are an essential aspect for understanding ecological phenomena since ecological experiments are often on short times scales relative to asymptotic behaviors of the model (Brown et al. 2001).
The rescue effect is the process for which emigrants from surrounding populations decline the risk of local extinction (Gotelli 1995). It is broadly accepted (Cazelles et al. 2001; Earn et al. 2000; Earn and Levin 2006) that a synchronized behavior, i.e all subpopulations are asymptotically identical, may have a devastating effect on the population survival by reducing the impact of the mentioned rescue effect. If all local populations synchronize at a low density level, any small unfavorable environmental fluctuation will have a strong effect on the population producing an increment of the global extinction risk. On the contrary, a species with an asynchronous behavior is less vulnerable to environmental changes since any patch with low density of population can be recolonized by individuals from other patches with larger densities. The phenomenon of asynchronization/synchronization has been observed in some biological populations of red squirrel (Ranta et al. 1997), snowshoe hare (Sinclair et al. 1993), or the Granville fritillary on the Aland island (Hanski et al. 1995). Fatal consequences of synchronous dynamics in nature has been observed in the extinction of a butterfly metapopulation with a synchronous behavior in response to climatic fluctuations (Thomas et al. 1996).
The paper is organized as follows. In Sect. 2, we give some biological details for the derivation of the model. In Sect. 3 we establish how synchronization relates to the local dynamics within each subpopulation. In particular, the presence of an equilibrium being a global attractor in the local dynamics characterizes the global attraction of an equilibrium independently of the dispersal rates. Nevertheless, we show in Sect. 4 that, under oscillatory behaviours or chaotic dynamics, asynchronous patterns appear for small or large dispersal rate. In particular, invoking to the rescue effect, the presence of an oscillatory behavior in the local dynamics considerably contributes in the conservation of the whole population. We close the paper with a discussion.
2 Model formulation
We study the dynamics of a population inhabiting in a homogeneous landscape consisting of s patches connected by dispersal or migration. Let
denote the vector of population density after N-periods with \(x_i(N)\) the population density of the i-th patch. The local dynamics in each subpopulation in the absence of dispersal is given by
where \(g : [0, \infty ) \longrightarrow [0, \infty )\) denotes the per-capita growth rate of the population. In our model, we employ a strategy of proportional dispersal independent of the time. Specifically, \(d_{ij}\) indicates the fraction of the population migrating from patch j to i and in case of equal indices, \(d_{ii}\) represents the proportion of the population inhabiting in the i-th patch which does not disperse. For simplicity, we also impose that the timings of reproduction and migration are the same for all patches. Thus, if we assume that reproduction occurs first, then dispersal, and finally census; we arrive at
for \(1\le i\le s\). By the definition of \(d_{ij}\), assuming no cost to dispersal,
An advantage of our model is its simplicity which enables us to deduce biological implications in metapopulation from the study of the involved parameters.
3 Global attraction in (3)
The aim of this section is to study the short/long term behaviour of a metapopulation when an individual moves from patch j to i with the same probability as from patch i to j and the local dynamics within each patch is simple.
We say that an equilibrium \(K \ge 0\) of
is a global attractor with \(h : \mathbf{R}^{n}_{+}\longrightarrow \mathbf{R}^{n}_{+}\) a function of type (2) if all solutions starting at a positive initial condition tend to K. Throughout this paper, \(\{x(N)\}_{N\in \mathbf{N}}\) with \(x(N)=(x_{1}(N),\ldots ,x_{s}(N))\) denotes the solution of (3) with initial condition \(x(0)\in \mathbf{R}^{s}_{+}\).
Theorem 1
Consider system (3) satisfying (4) and the symmetric condition
- (S) :
-
\(d_{ij}=d_{ji}\) for all \(i,j=1,\ldots ,s.\)
If \(x_{*}\ge 0\) is a global attractor of
then \((x_{*},\ldots ,x_{*})\in \mathbf{R}^{s}_{+}\) is a global attractor of (3) i.e.
and for all \(x(0)\in Int(\mathbf{R}^{s}_{+})\).
The previous theorem sheds some consequences of biological interest on the long term behavior of (3). Receiving migrants from other patches never mitigates the global extinction in the metapopulation when the isolated local population can not persist in the absence of dispersal. On the other hand, independent of number of patches, structure of the landscape, dispersal rates and type of convergence, i.e. overcompensatory or compensatory, we have that:
-
All subpopulations are asymptotically identical.
-
The size of the total population is constant.
These biological consequences imply that control strategies like conservation corridors (Cushman et al. 2013) which increase the connectivity between patches may not produce any benefit in the long term behavior of species inhabiting in homogeneous landscapes with simple local dynamics.
Condition (S) is essential for the validity of Theorem 1, see Example 2 in Appendix 1. Another aspect is that we characterize the global attraction in system (3) independent of number of patches and dispersal fraction. Specifically, if \(x_{*} > 0\) is not a global attractor of (5) then, by classical results (Coppel 1995), (5) has a positive two cycle \(\{y_1, y_2\}\), possibly \(y_1 = y_2\), with \(y_1 \not = x_{*}\) and \(y_2 \not = x_{*}\). Hence, for \(s = 2\), (3) has at least two equilibria in \(Int(\mathbf{R}^{2}_{+})\) taking either \(d_{12} = d_{21} = 1\), if \(\{y_1, y_2\}\) is a proper two cycle, or \(d_{12} = d_{21} = 0\), otherwise.
The method of proof employed in the preceding theorem enables us to deduce that given an initial condition \(x(0) = (x_1(0),\ldots , x_s(0))\) with
then \(|x_j (N)-x_i(N)| \le \max \{|f^N(x)-f^{N}(y)|: x, y \in [m, M]\}.\) This property generates some dynamical implications different from the global attraction to an equilibrium. As a first instance, we can use this idea to study global attraction of periodic points: If \(\{p_1,\ldots , p_l\}\) is a l-periodic point of (5) and I is a compact interval in the basis of attraction of \(p_1\) for equation
then, given any initial condition in \(I\times I\cdots \times I\), the \(\omega \)-limit set of any orbit is the synchronous periodic point \(\{(p_1, \ldots , p_1),(p_2,..., p_2),...,(p_l ,...p_l)\}\), (see Appendix 1 for the proof and a simple application of this property for the Ricker equation with a stable two cycle). As a second instance, we estimate the velocity of convergence to an equilibrium or periodic point from the iteration of a scalar function. The study of this rate of convergence has practical implications since it can help explain intermediate time scales and some cases of synchrony in nature.
In contrast with the long term behavior, dispersal plays a crucial role in the transient behavior of (3). Specifically, note that by Theorem 1, the synchronous manifold
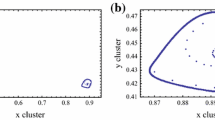
is a global attractor independent of the dispersal fraction. However, the velocity of attraction considerably depends on it. In Fig. 1 we have plotted the evolution of the first generations of the metapopulation to illustrate this phenomenon.

Evolution of \(|x_{1}(N)-x_{2}(N)|\) for system (3) with \(s=2\), \(d_{ij}=d\), and local dynamics given by \(f_{1}(x)=xe^{1.6-x}\) (A) and \(f_{2}(x)=xe^{0.8-x}\) (B). For each value \(d\in (0,1)\), we produce 6 iterations with random initial condition in \([0.1,3.1]\times [0.1,3.1]\) (darker points represent iterations of higher orders, for instance, 6th iteration is the darkest point). Note that the velocity of attraction to the synchronous manifold \(\varDelta \) is much higher for intermediate dispersal than for large/small ones
Biologically, we observe that the population is less vulnerable to environmental stochasticity when the dispersal rate is large or small.
4 Large/small dispersal creates new dynamical behaviors when the local dynamics are chaotic
In this section we study the impact on the metapopulation when the local dynamics in all patches are chaotic. The “new” term refers to the dynamical patterns non-presented for intermediate dispersal rates (\(d_{ij}\approx 0.5\)). To approach this issue and avoid cumbersome computations, we consider model (3) with two patches, specifically
By the implicit function theorem, small/large dispersal typically creates new asymmetric patterns when the local dynamics present a two cycle (see Lemma 1 in Appendix 2). Next we show that small/large dispersal is a good mechanism to generate infinitely many asynchronous patterns under local chaotic dynamics. This claim is not true for any dispersal rate. For instance, there is global synchronization for \(d = 0.5\) [see Cazelles et al. (2001), Earn et al. (2000), Earn and Levin (2006), Faure and Schreiber (2014), for subtler results of synchronization in (6)].
To state our main result, we introduce some basic notions on chaotic dynamics taken from Liz and Ruiz-Herrera (2012), see also Liz and Ruiz-Herrera (2012b). A map \(F:\mathbf{R}^{s}_{+}\longrightarrow \mathbf{R}^{s}_{+}\) has chaotic dynamics on n-symbols if there exist n disjoint compact sets \(\mathcal {K}_0, \mathcal {K}_1, \ldots , \mathcal {K}_{n-1} \subset \mathbf{R}^{s}_{+}\) such that, for each two-sided sequence \((s_i)_{i\in \mathbf{Z}}\in \{0, 1,\ldots ,n-1\}^{\mathbf{Z}}\), there exists a corresponding sequence \((\omega _{i})_{i\in \mathbf{Z}}\in (\cup _{i=0}^{n-1}\mathcal {K}_{i})^{\mathbf{Z}}\) such that
and, whenever \((s_i)_{i\in \mathbf{Z}}\) is a k-periodic sequence (that is, \(s_{i+k} = s_i\), \(\forall i\in \mathbf{Z}\)) for some \(k \ge 1\), there exists a k-periodic sequence \((\omega _{i})_{i\in \mathbf{Z}}\in (\cup _{i=0}^{n-1}\mathcal {K}_{i})^{\mathbf{Z}}\) satisfying (7). As mentioned in Liz and Ruiz-Herrera (2012), our definition of chaotic dynamics has the classical properties of complex dynamics such as sensitive dependence on the initial conditions or the presence of an invariant set semiconjugate to the Bernoulli shift. Chaos according to our definition implies chaos in the sense of coin-tossing and in the sense of Block–Coppel (Aulbach and Kieninger 2001).
Next we introduce the notion of \(\delta \)-strictly turbulent function taken from Liz and Ruiz-Herrera (2012). This definition is more restrictive than the usual notion of turbulence and, as is well known, a turbulent function always has chaotic dynamics (Block and Coppel 1992).
Definition 1
Let I be a real interval and consider \(g : I \longrightarrow I\) a continuous function. We say that g is \(\delta \)-strictly turbulent if there exist four constants \(\beta _0 < \beta _1 < \gamma _0 < \gamma _1\), and \(\delta > 0\) so that
The following theorem is the main result of this section, (see Appendix 2 for the proof). For convenience, \(F :\mathbf{R}^{2}_+\longrightarrow \mathbf{R}^{2}_{+}\) denotes the map associated with (6), namely
Theorem 2
Consider system (6) with f a \(\delta \)-strictly turbulent function with parameters
Then, there exists \(d_{*} > 0\) so that F has chaotic dynamics on four symbols relative to
provided \(d_1, d_2 \le d_{*}\). In addition, if \(f^2\) is \(\delta \)-strictly turbulent with parameters
then there exists \(d^{*}>0\) so that \(F^{2}=F\circ F\) has chaotic dynamics on four symbols relative to
provided \((1-d_1), (1-d_2)\le d^{*}\).
Remark 1
If some iteration \(f^m\) is \(\delta \)-strictly turbulent then the first part of Theorem 2 holds replacing F by \(F^{m}\).
In Theorem 2, as
each sequence in \(\{2,3\}^{\mathbf{Z}}\) produces an asynchronous orbit in (6). Biologically, this property highlights the strong connection between chaos in the local dynamics and the conservation of the whole species.
In practical examples, one can estimate \(d_{*}\) and \(d^*\). To do this we have just to check conditions (8)–(11) and (12)–(15) of Appendix 2. On the other hand, Theorem 2 provides us further implications than the existence of chaos in a metapopulation. Specifically, we can describe short/intermediate/long behaviour of infinitely many orbits; regions where the chaotic behaviour occurs, i.e. \(\mathcal {K}_0, \mathcal {K}_2, \mathcal {K}_1, \mathcal {K}_3\); or the stability of our results under small perturbations or noise, see Remark 2 in Appendix 2. Moreover, we can estimate the sensitive dependence on the initial conditions using our approach and the following adapted version of Proposition 3.1 in Liz and Ruiz-Herrera (2012):
Proposition 1
Take two different indices \(i, j \in \{0, 1, 2, 3\}\) and assume that \(G : D \subset \mathbf{R}^{n}\longrightarrow \mathbf{R}^{n}\) has chaotic dynamics on four symbols relative to \(\mathcal {K}_0, \mathcal {K}_1, \mathcal {K}_2, \mathcal {K}_3,\) and denote \(d = dist(\mathcal {K}_i, \mathcal {K}_j ) > 0.\) For \(\varepsilon > 0\), we define
and
where, \(\lceil \cdot \rceil \) denotes the ceiling of x, that is, the smallest integer not less than x. Then, there are two points \(x_0, y_0\) satisfying that
-
\( x_0, y_0 \in \mathcal {K}_j\) ,
-
\(\Vert x_0-y_0\Vert < \varepsilon ,\)
-
\(\max _{0\le r\le N_{*}}\{\Vert G^r(x_0)-G^{r}(y_0)\Vert \} > d\).
Next we discuss an example to illustrate the previous result.
Example 1
Consider system (6) with
It is easy to prove that \(f^{2}(x)\) is 3.3-strictly turbulent with parameters
Then, by Theorem 2, \(F^{2}\) has chaotic dynamics on four symbols relative to
provided \(d_1, d_2 \le d_{*}\) or \((1- d_1),(1- d_2) \le d^{*}\). We show in Appendix 2 that we can take \(d_{*} = d^{*} =\frac{3.3}{2(e^4+e^8)}\). It is worth mentioning some biological implications of Theorem 2 in (6), specifically property (7). For instance, if we take the bi-infinite sequence
(assume that the first 2 has the zero position in the bi-infinite sequence), we find a point \(z \in \mathcal {K}_2\) so that
On the other hand, if we take the bi-infinite sequence
we can choose a point \(z^{*}\in \mathcal {K}_{3}\),
Hence for each sequence in \(\{2, 3\}^{\mathbf{Z}}\) we are able to obtain a different asynchronous pattern in (6).
Concerning the evaluation of the sensitive dependence on the initial conditions, working with the max-norm, we easily have that for \(j=2, i=3\) and any \(\varepsilon > 0\),
and thus,
Finally, by Proposition 1, there are two points \(z_0, z_1 \in \mathcal {K}_2\) so that \(\Vert z_0 - z_1\Vert \le \varepsilon \) and for some \(r \le N^{*}\),
5 Discussion
The main purpose of this paper was to understand the interplay between local dynamics and dispersal in discrete-time metapopulation models for homogeneous landscapes. Theorem 3.1 reflects that dispersal does not alter the simple long-term behavior of a metapopulation when the dynamics in each patch is simple. In more detail, a global attractor \(x_{*}\ge 0\) in (5) always produces a global attractor \((x_{*},\ldots , x_{*})\) in (3). As discussed in Sect. 3, the method of proof of that theorem is based on the dynamical behavior of an equation in one dimension and can be used to describe regions of attraction of synchronous periodic orbits as well. On the other hand, Theorem 2 shows that the dispersal rates seriously affect to the dynamical behavior of the whole population when the dynamics inside each patch presents an oscillatory behavior. Specifically, small/large dispersal creates new asynchronous chaotic orbits. This property stresses that several patches connected by dispersal are by no means equivalent to one big patch. Moreover, our analysis supports the numerical studies of Heino et al. (1997) and Allen et al. (1993) where these authors prove numerically that a chaotic behaviour in the local dynamics reduces the degree of synchrony.
This paper provided some biological properties concerning the transient dynamics of (3). The study of short/intermediate times scales in ecological models is mainly motivated by two reasons: the time scale of biological interest is mathematically short and the asymptotic behavior of the system can be completely different from the behavior in short/intermediate periods. For instance, as was reported with some examples by Schreiber (2001) (see also Schreiber 2003 and Liz 2010), populations can persist for hundreds of generations, and then, suddenly go to extinction without any change in the parameters. In contrast with the long term scale, dispersal always affects to the dynamical behaviour of (3), typically, from a synchronization perspective. Intermediate dispersal rates, i.e. \(d_{ij} \approx 0.5\) for all i, j, produces an automatic synchronization after few iterations. If the dynamics in each patch is simple,
is always a global attractor but the velocity of attraction is low for small/large dispersal as stressed in Sect. 3. In case of local chaotic dynamics, such a manifold is never a global attractor for small/large dispersal rates. Moreover, one can give a precise description of the itinerary of infinitely many chaotic orbits with asynchronous dynamics.
References
Allen JC, Schaffer WM, Rosko D (1993) Chaos reduces species extinction by amplifying local population noise. Nature 364:229–232
Anteneodo C, Pinto SEDS, Batista AM, Viana RL (2003) Analytical results for coupled-map lattices with long-range interactions. Phys Rev E 68:045202
Aulbach B, Kieninger B (2001) On three definitions of chaos. Nonlinear Dyn Syst Theory 1:23–37
Block LS, Coppel WA (1992) Dynamics in one dimension. Springer, Berlin
Brown JH, Whitham TG, Ernest SM, Gehring CA (2001) Complex species interactions and the dynamics of ecological systems: long-term experiments. Science 293:643–650
Cazelles B, Bottani S, Stone L (2001) Unexpected coherence and conservation. Proc R Soc London B 268:2595–2602
Coppel WA (1995) The solution of equations by iteration. Mathematical Proceedings of the Cambridge Philosophical Society. Cambridge University Press, Cambridge, pp 41–43
Cushman SA, McRae B, Adriansen F, Beier P, Shirley M, Zeller K (2013) Biological corridors and connectivity. Conservation in theory and practice. Wiley, New York
De Monte S, dOvidio F, Chat H, Mosekilde E (2004) Noise-induced macroscopic bifurcations in globally coupled chaotic units. Phys Rev Lett 92:254101
Earn DJ, Levin SA, Rohani P (2000) Coherence and conservation. Science 290:1360–1364
Earn DJ, Levin SA (2006) Global asymptotic coherence in discrete dynamical systems. Proc Natl Acad Sci U. S. A. 103:3968–3971
Elaydi S (2005) An introduction to difference equations. Springer Science and Business Media, New York
Faure M, Schreiber SJ (2014) Quasi-stationary distributions for randomly perturbed dynamical systems. Ann Appl Probab 24:553–598
Franco D, Ruiz-Herrera A (2015) To connect or not to connect isolated patches. J Theor Biol 370:72–80
Gotelli NJ (1995) A primer of ecology. Sinauer associates incorporated, Sunderland
Gyllenberg M, Sderbacka G, Ericsson S (1993) Does migration stabilize local population dynamics? Analysis of a discrete metapopulation model. Math Biosci 118:25–49
Hanski I, Pakkala T, Kuussaari M, Lei G (1995) Metapopulation persistence of an endangered butterfly in a fragmented landscape. Oikos 21–28
Hanski I, Gilpin ME et al (1997) Metapopulation biology: ecology, genetics, and evolution. Academic press, San Diego
Hastings A (1993) Complex interactions between dispersal and dynamics: lessons from coupled logistic equations. Ecology 1362–1372
Hastings A (2004) Transients: the key to long-term ecological understanding? Trends Ecol Evol 19:39–45
Heino M, Kaitala V, Ranta E, Lindstrm J (1997) Synchronous dynamics and rates of extinction in spatially structured populations. Proc R Soc London 264(486):481 Series B: Biological Sciences
Kirkland S, Li CK, Schreiber SJ (2006) On the evolution of dispersal in patchy landscapes. SIAM J Appl Math 66:1366–1382
Liz E (2010) Complex dynamics of survival and extinction in simple population models with harvesting. Theor Ecol 3:209–221
Liz E, Ruiz-Herrera A (2012) Chaos in discrete structured population models. SIAM J Appl Dyn Syst 11:1200–1214
Liz E, Ruiz-Herrera A (2012b) The hydra effect, bubbles, and chaos in a simple discrete population model with constant effort harvesting. J Math Biol 65:997–1016
Manrubia SC, Mikhailov AS (2000) Very long transients in globally coupled maps. EPL (Europhys Lett) 50:580
Ranta E, Kaitala V, Lindstrm J, Helle E (1997) The Moran effect and synchrony in population dynamics. Oikos 136–142
Schreiber SJ (2001) Chaos and population disappearances in simple ecological models. J Math Biol 42:239–260
Sinclair AR et al. (1993) Can the solar cycle and climate synchronize the snowshoe hare cycle in Canada? Evidence from tree rings and ice cores. Am Nat 173–198
Thomas CD, Singer MC, Boughton DA (1996) Catastrophic extinction of population sources in a butterfly metapopulation. Am Nat 957–975
Wysham DB, Hastings A (2008) Sudden shifts in ecological systems: Intermittency and transients in the coupled Ricker population model. Bull Math Biol 70:1013–1031
Tilman D, Kareiva PM (1997) Spatial ecology: the role of space in population dynamics and interspecific interactions, vol 30. Princeton University Press, Princeton
Yakubu AA, Castillo-Chavez C (2002) Interplay between local dynamics and dispersal in discrete-time metapopulation models. J Theor Biol 218:273–288
Acknowledgments
I am very grateful to Prof. E. Liz, Prof. D. Franco, the Associate Editor Prof. S. Schreiber and two anonymous reviewers of a first draft of this paper. Their comments and insightful critique helped me very much to improve the paper. A. Ruiz-Herrera was supported by the Spanish Ministry of Science and Innovation Grant MTM2013-43404-P and by the European Research Council StG 259559.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
Proof of Theorem 1
Given an initial condition
we define
The key fact to prove Theorem 1 is that by (4) and the symmetry condition (S),
where
denotes the map associated with system (3). Each component satisfies that, for all \(i=1,\ldots ,s\)
In these inequalities we use conditions (4) and (S). Therefore, by an inductive argument and using that \(f([m,M])\subset \mathbf{R}\) is an interval we obtain that
for all \(N\in \mathbf{N}\). Finally, by the global behavior of (5) and by Theorem 4.7, p. 182 in Elaydi (2005), we deduce that
(this attraction is understood under the Hausdorff distance). Consequently,
\(\square \)
Example 2
Consider
with
By a simple analysis we can see that F has three fixed points in \(Int(\mathbf{R}^{2}_{+})\) what excludes the global attraction of a unique equilibrium for the system associated with F. However, by a simple analysis, 0.9 is a global attractor for
Attraction of periodic points and Ricker equation with a stable two cycle
To prove the global stability for periodic points, replace in the proof of Theorem 1 f by \(f^{l}\) and the conclusion follows. \(\square \)
Example 3
When \(r\in (2,2.25) \), \(f(x)=xe^{r-x}\) satisfies that \(f^{2}\) has three positive equilibria, say \(p_{1}<r<p_{2}\) (a two cycle and an equilibrium) and \(f^{2}(1)>1\). Thus any compact interval \(I=[a,b]\) contained in [1, r) (resp. (r, f(1)]) is in the basis of attraction of \(p_{1}\) (resp. \(p_{2}\)) for
Note that
because \(f^{2}\) is increasing in [a, b] and \(f^{2n}(a), f^{2n}(b)\longrightarrow p_{1}.\) \(\square \)
Appendix 2
Proof of Theorem 2
To prove this theorem we have to argue as in the proof of Theorem 4.2 in Liz and Ruiz-Herrera (2012). For convenience, we denote \(F_{d_{1},d_{2}}=((F_{d_{1},d_{2}})_{1},(F_{d_{1},d_{2}})_{2}):\mathbf{R}^{2}_{+}\longrightarrow \mathbf{R}^{2}_{+}\) the map associated with system (6). It is clear that when \(d_{1}=d_{2}=0\),
Using the continuity of \(F_{d_{1},d_{2}}\) with respect to \(d_{1},d_{2}\), it is possible to find a constant \(d_{*}>0\) satisfying
provided \(d_{1},d_{2}\le d_{*}\), and \(x_{1},x_{2}\in [\beta _{0},\beta _{1}]\times [\gamma _{0},\gamma _{1}]\). Next we consider the translations \(t_{v}\), \(t_{w}\), \(t_{\widetilde{v}}\), \(t_{\widetilde{w}}\) according to
and the maps \(h_{0},h_{1},h_{2},h_{3}\) defined by
Next, we note that the h-cubes (see Definition 3.2 in Liz and Ruiz-Herrera 2012) \(\mathcal {K}_{0},\mathcal {K}_{1},\mathcal {K}_{2},\mathcal {K}_{3}\) with
-
\(u(\mathcal {K}_{i})=2\) and \(s(\mathcal {K}_{i})=0\) for all \(i=0,1,2,3,\)
-
\(c_{\mathcal {K}_{0}}=h_{0}\circ t_{v}\), \(c_{\mathcal {K}_{1}}=h_{q}\circ t_{w}\), \(c_{\mathcal {K}_{2}}=h_{2}\circ t_{\widetilde{v}}\), \(c_{\mathcal {K}_{3}}=h_{3}\circ t_{\widetilde{w}}\)
satisfy the convering relations (see Definition 3.3 in Liz and Ruiz-Herrera 2012)
for every pair of indices i, j. The proof of
for all \(j=0,1,2,3\) is exactly the same as (4.5) in Liz and Ruiz-Herrera (2012) replacing \(F_{\alpha }^{k}\) in that paper by \(F_{d_{1}d_{2}}\). To prove
for all \(j=0,1,2,3\) we have to argue as before with the linear map \(A(x_{1},x_{2})=(-2 x_{1},-2 x_{2})\) see the last part of proof of Theorem 4.2 in Liz and Ruiz-Herrera (2012). To prove
for all \(j=0,1,2,3\) we have to argue as above with the linear map \(A(x_{1},x_{2})=(-2 x_{1},2 x_{2})\). Finally
for all \(j=0,1,2,3\) is deduced considering \(A(x_{1},x_{2})=(2 x_{1},-2 x_{2})\). Collecting all the information, the proof of the first part of the theorem is completed by using Theorem 3.4. in Liz and Ruiz-Herrera (2012). Note that this theorem works exactly in the same way when there exists four disjoint h-sets \(\mathcal {K}_{0}\), \(\mathcal {K}_{1}\), \(\mathcal {K}_{2}\), \(\mathcal {K}_{3}\) with
for all \(i,j=0,1,2,3.\)
The proof of the second part of Theorem 2 is the same as the first part since
where \(F_{d_{1}d_{2}}^{2}=F_{d_{1}d_{2}}\circ F_{d_{1}d_{2}}.\) In this case we have to take \(d^{*}\) satisfying that
provided \((1-d_{1}), (1-d_{2})\le d^{*}\) and \(x_{1},x_{2}\in [\beta _{0},\beta _{1}]\times [\gamma _{0},\gamma _{1}]\) \(\square \)
Remark 2
The proof of the previous theorem remains true for small perturbations of \(F_{d_{1}d_{2}}\) provided (8)–(11) and (12)–(15) hold.
1.1 Computations of Example 1
First we observe that \(F_{d_{1}d_{2}}^{2}=((F_{d_{1}d_{2}}^{2})_{1},(F_{d_{1}d_{2}}^{2})_{2})\) can be written as
Using that \(f(x)=x e^{5-x}\) is bounded by \(e^{4}\) and Lipschitz continuous with Lipschitz constant \(e^{5}\), we deduce that
We use these inequalities to guarantee (8)–(11). Analogously, and using that \(d_{1}, d_{2}\le 1\), we have that
We use these inequalities to guarantee (12)–(15).
Lemma 1
Consider system (6) with f of class \(\mathcal {C}^{1}\). Assume that
has a two cycle \(\{p_{1},p_{2}\}\) with \(p_{1}\not =p_{2}\) and satisfying that
Then, there exists \(d_{*}>0\) so that if
system (6) has a two cycle \(\{z_{1},z_{2}\}\) with \(z_{i}=(r_{1}^{i},r_{2}^{i})\) and \(r_{1}^{i}\not =r_{2}^{i}\). On the other hand, there exists \(d^{*}>0\) so that if
system (6) has an equilibrium \(p^{*}=(p_{1}^{*},p_{2}^{*})\) with \(p_{1}^{*}\not =p_{2}^{*}\).
Proof
Define
where
This map is of class \(\mathcal {C}^{1}\), its zeros determine the two cycles of (6) and
with
equal to
Recall that \(\{p_{1},p_{2}\}\) is the two cycle of (16). Then, by the implicit function theorem, we directly deduce the first part of the lemma. For the second part of the lemma we have to repeat the same argument for the map
at \((p_{1},p_{2},1,1)\). \(\square \)
Rights and permissions
About this article

Cite this article
Ruiz-Herrera, A. Analysis of dispersal effects in metapopulation models. J. Math. Biol. 72, 683–698 (2016). https://doi.org/10.1007/s00285-015-0897-9
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00285-015-0897-9
Keywords
- Metapopulation
- Synchrony
- Chaos
- Global stability
- Sensitive dependence on the initial conditions
- Transient dynamics