
Abstract
The United States Endangered Species Act (ESA) was enacted to protect and restore declining fish, wildlife, and plant populations. The ESA mandates endangered species protection irrespective of costs. This translates to the restriction of activities that harm endangered populations. We discuss criticisms of the ESA in the context of public land management and examine under what circumstance banning non-conservation activity on multiple use federal lands can be socially optimal. We develop a bioeconomic model to frame the species management problem under the ESA and identify scenarios where ESA-imposed regulations emerge as optimal strategies. Results suggest that banning harmful activities is a preferred strategy when valued endangered species are in decline or exposed to poor habitat quality. However, it is not optimal to sustain such a strategy in perpetuity. An optimal plan involves a switch to land-use practices characteristic of habitat conservation plans.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Habitat destruction threatens species existence; species loss is accelerating because of human population growth, urban sprawl, agricultural development and other profitable land conversions on public and private lands (Barbier and Schulz 1997; Polasky et al. 2004; Brock et al. 2009). In an effort to reverse this trend, the United States Congress passed the Endangered Species Act (ESA) in 1973. The ESA establishes a set of rules for planning government intervention to protect dwindling fish, wildlife, and plant populations and creates a platform for recovery and conservation. Opponents of the ESA argue for restructuring the act. They claim that the ESA creates extensive regulatory burdens that directly conflict with other public and private land-use ventures (Merrifield 1996; Innes et al. 1998; Shogren et al. 1999; Langpap 2006). Substantial effort has gone into understanding the conflicts between private property rights and endangered species policy (Innes et al. 1998; Langpap 2006; Eichner and Pethig 2009; Lewis et al. 2011; Sorice et al. 2011). We focus instead on ESA regulation and public land management and specifically address the question, are there conditions that make ESA-imposed regulations socially optimal on federally managed lands?Footnote 1
The ESA mandates federal participation in conservation by imposing land-use restrictions on federal land managing agencies. Under the ESA, wildlife management officials have two primary tools to support population recovery on existing public lands, (1) restricting ‘take’, which includes any harvest or incidental killing that may take place as part of otherwise lawful activities (e.g. ordnance training on military lands) (DOI 1996), and (2) improving the quality of existing habitat for local endangered populations (FWS 2007). Both of these management modifications are common on government land (e.g., on military installations, US National Forests, and US Fish and Wildlife reserves) in the American west, where public lands are administered by federal agencies such as the Bureau of Land Management (BLM), the U. S. National Park Service (NPS), and the Department of Defense (DoD), make up approximately half of the landscape (Skillen 2009). Often, agencies must curtail other socially beneficial activities (e.g. grazing, renewable energy development, mining, military training) in order to meet conservation goals.
The ESA is explicit about how to navigate tradeoffs when listing a species as threatened or endangered—only evaluation of biological risks faced are considered to the exclusion of all other factors (Coggins et al. 1993). But the act is unclear about what information can or should be used when determining delisting criteria and long-term management for recovered populations; this ultimately delays the recovery process, as well as the reallocation of scarce resources to other beneficial land-use activities. Thus a secondary objective of this study is to use the mathematical formulation of the recovery problem to highlight areas in which the ESA can be improved to support efficient resource allocation within recovery plans. Economic tradeoffs are inherent in species recovery under the ESA, but the act does not discuss how agencies should structure a recovery plan in light of such factors. Economic analysis can help reconciliation of biological recovery goals amidst budget constraints and alternate land-use benefits (Shogren et al. 1999). Brown and Shogren (1998) state that the role of economists under the ESA is to find the least-cost approach to achieving some biologically determined recovery criteria. Economic analysis can also be helpful in establishing post-delisting management strategies since, over the long-run, conservation efforts will need to coexist with conflicting land-use activities (Rosenzweig 2003; Godfray 2011; Persha et al. 2011).
Economics analyses pertaining to endangered species policy and public land management have focused on the U.S. Fish and Wildlife Service (FWS) budget allocation (Langpap and Kerkvliet 2010). We take a mathematical bioeconomic approach to conceptualizing the management issue on public lands and discussing the implications of the ESA. We develop an optimal management model that couples the biological growth dynamics of a managed population with the economic incentive properties of conservation. We tailor the stylized model to threatened and endangered (T&E) species that (1) exhibit decreasing population growth per capita with reductions in population density (i.e. Allee effect) and (2) inhabit significantly degraded habitat that must be maintained over a lengthy management horizon via artificial habitat improvements. Sonoran pronghorn (Hoffman et al. 2010), Desert Tortoise (Tracy et al. 2005), Sierra Nevada bighorn sheep (FWS 2007), and Northern spotted owl (Courchamp et al. 1999; FWS 2011b) are some examples of T&E species that satisfy these conditions.
The ESA is criticized as an inefficient and costly way to do conservation (Stokstad 2005). Our bioeconomic investigation contributes to the literature by highlighting the important role that ESA style management can play along the optimal trajectory to recovery—implying that in some cases ESA style management not only potentially passes a benefit-cost test but also is socially optimal. However, our results also show that ESA style prohibition is unlikely to be long-run optimal. Using our results, we discuss practical post-ESA management plans. These results contribute to the literature by clarifying the place of the ESA, and its incentive properties, in the suite of conservation instruments.
2 Material and methods
2.1 A model for habitat quality and population growth
Sonoran pronghorn (Antilocapra americana sonoriensis, hereafter referred to as pronghorn), an endangered species found exclusively on public land in southern Arizona, provide a motivating example for our analysis. Livestock grazing in the southwestern United States led to significant degradation of pronghorn habitat (Sheridan 2000). Human activities such as hunting and fencing led to further pronghorn declines (FWS 2002). The US military uses a large part of the current range of pronghorn for live ordnance training, which may also place individual pronghorns in danger. Furthermore, changing climate has brought on frequent, harsher droughts in the Sonoran desert (Hosack et al. 2002). The supplement and amendment to the 1998 final revised pronghorn recovery plan (FWS 2002) states that improved habitat quality, which includes establishment and assessment of forage enhancement plots, evaluation of pronghorn use and dependence on temporary and permanent water sources, reducing predation in specific areas of pronghorn habitat, is necessary for pronghorn recovery. Such measures imply that survival of the pronghorn depends on continued habitat maintenance through the foreseeable future, as is the case in other federally funded management programs across the US (FWS 1996, 2005b, 2013).
Ecosystems are not static and humans have highly modified many habitats. We assume that without continued management intervention and regulation over the current horizon, species growth is unsustainable. Large-scale anthropogenic changes to the biosphere make this condition common for many endangered populations (Bean and Wilcove 1996; Bean 1998). For instance the areas occupied by Sonoran pronghorn were grasslands prior to cattle introduction. The grassland has largely shifted into desert. Roads and fences present other major obstacles for pronghorn.Footnote 2 Therefore, it is reasonable to expect that in many cases involving endangered species continued human intervention is necessary. Continued habitat investment/cost are part of the opportunity cost of conservation that needs to be accounted for.Footnote 3
To develop a model of an endangered species such as pronghorn, let \(x(t)\) denote the size of the population at time \(t\). Growth dynamics for the population are governed by
Eq. (1) is a population growth model that captures the effects of habitat quality on population growth as well as the biological impact of non-conservation activities. \(h(t)\) represents the quality of habitat available to population \(x(t)\). \(y_x (t)\) is the removal rate of the protected population (hereafter referred to as ‘take’) due to other legal activities that result in the reduction of the population. Specifically, \(y_x (t)\) is conceptualized as removing animals from the population or causing physical harm separate from habitat destruction. Take may be the result of targeted pressures on the population (e.g. harvesting, translocation) or the incidental byproduct of other valuable uses of habitat (e.g. ordnance delivery and live rounds from training flights on military lands). Habitat destruction is modeled separately [see Eq. (3)].
For some species, population growth per capita decreases with a reduction in population density. For example, pronghorn vigilance against potential predators is more effective in larger herds, allowing individuals to focus more on foraging (Hoffman et al. 2010). We incorporate this phenomenon by introducing an Allee effect into the population growth function, \(G\). The growth curve is convex and negative below the Allee threshold population, and concave afterwards. Below the Allee threshold, extinction is certain without intervention (see Fig. 1a). The population growth function is
where \(r\) is the positive intrinsic growth rate of the population, absent density effects. \(n(h)\) is the carrying capacity, which is related to habitat quality (\(n(h)>0\)). The growth rate, \(G\), is negative when species fall below the Allee threshold, which is denoted \(m(h)\) (i.e. \(G<0\) when \(0<x<m(h)\)). \(G\) is positive and bounded above when the population is between the Allee threshold and the carrying capacity (i.e. \(G>0\) and \(\partial ^{2}G/\partial x^{2}<0\) when \(m(h)<x<n(h)\)). Finally, \(G\) attains maximum growth at population \(x_{MSY} \). We assume that active habitat enhancement reduces the Allee threshold (i.e. \(\partial m/\partial h<0, \partial ^{2}m/\partial h^{2}>0)\)—e.g. increases in resource availability and/or reduction in predation pressure (Hoffman et al. 2010)—and increases the carrying capacity (\(\partial n/\partial h>0, \partial ^{2}n/\partial h^{2}<0\)). Lastly, we assume that a habitat quality threshold \(h_{crit}\) exists such that for \(h<h_{crit}\) the target population is unable to survive in the wild and dies out (Fig. 1b).Footnote 4 The explicit functional forms of \(m(h)\) and \(n(h)\) used in numerical analysis are given in Table 1.

Growth of the target species expressed as a dynamic function of habitat quality (\(h\)) with an Allee effect. a Illustrates growth of the target species when habitat quality is maintained above a critical threshold (i.e. \(h>h_{crit}\)). The growth curve is negative when species fall below the Allee threshold (\(m(h)\)), and positive (but bounded) when species exceed the Allee threshold but remain under the carrying capacity (i.e. \(G<0\) when \(x<m(h), G>0\) when \(m(h)<x<n(h)\)), and attains a maximum at \(x_{MSY}\). b Illustrates ‘growth’ of the target species when habitat quality falls below a critical threshold (i.e. \(h<h_{crit}\)). The target population is unable to persist due to lack of resources
Assume the temporal dynamics of habitat quality can be expressed as,
Eq. (3) is a first-order approximation to any process of improving habitat quality in a world where other pressures reduce habitat. \(y_h\) denotes managerial investments in habitat enhancement. \(y_h\), measured in units of \(h\) per time, has a positive and monotonic effect on habitat quality (\(\partial \dot{h}/\partial y_h>0\)). \(\omega \) is the intrinsic rate of habitat increase in the absence of human intervention. We model habitat degradation according to \(\gamma (h)\). The magnitude of \(\gamma \) diminishes with further reduction in habitat quality (i.e. \(\gamma (h)\rightarrow 0\) as \(h\rightarrow 0^{+}\) and \(\partial \gamma /\partial h>0\) for all \(h\ge 0\)).
Exogenous development pressures (e.g., water demand), increased human use of wild areas, and climate change create a scenario where constant intervention must be undertaken to combat habitat degradation. In many cases habitat increase may be near zero without active management. Therefore, we simplify the habitat model by setting \(\omega \) to zero (this assumption is relaxed in Subsect. 4.3).
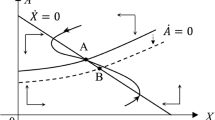
Figure 2 illustrates the phase dynamics of the ecological system in the absence of managers, where there is no investment in habitat quality \((y_h =0)\) and no restriction on take \((y_x =y_x^{MAX})\)—hereafter referred to as the no-regulation scenario. No regulation refers to cases where other economic activities persist, but people do not play an active role in conserving the species. The long-run outcome of this scenario is eventual collapse of the population due to the compounded effect of constant habitat degradation and unregulated take—conditions that motivated the ESA. Existence of the ESA suggests there is public desire to prevent the extinction of rare species, and this may be achieved with sufficient habitat enhancement conditional on some level of allowable take. In the next subsection, we explore the conditions under which a social planner would optimally choose to engage in species conservation (e.g. reducing take and enhancing habitat to some degree) and when such conservation behaviors would satisfy the ESA.

Phase dynamics for the no-regulation scenario with no investment in habitat quality (\(y_h =0\)) and no regulation on take (\(y_x =y_x^{max}\)). The dashed ‘c-curve’ is a 2-state representation of the Allee curve from Fig. 1 with varying levels of habitat quality. Initial populations outside the Allee basin and below carrying capacity (i.e. \(\left\{ {\left( {h_0 ,x_0} \right) : h_0 >h_{crit}, m\left( h \right) <x_0 <n(h)} \right\} \)) experience positive growth, but continued degradation of habitat leads to eventual population decline. Extinction is the long-run outcome from all initial conditions in the absence of habitat enhancement
2.2 A complete market for conservation
The existence value associated with a species includes non-consumptive economic benefits from maintaining the population; this includes non-consumptive use values, e.g., wildlife viewing, and values more difficult to measure such as individuals’ personal values expressed as a willingness to forgo other goods and services to ensure the existence of the species (Freeman 2003). Existence value of a species can be considerable and can outweigh other values (Swanson and Barbier 1992; Barnes 1996; Kellner et al. 2011). Estimating existence values for rare species is an area of ongoing research (Loomis and White 1996), but such values are likely important for managers to consider. If there were a complete market for conservation, then corresponding existence values could be realized. A federal land manager, acting as a social planner may manage the system as if there were a complete market for conservation; this is analogous to maximizing the discounted social net benefits from the full suite of land-use activities. Initiating management at some arbitrary time, \(t=0\), the bioeconomic problem of optimally managing a renewable resource is
where the discount rate, \(\delta \), reflects the social discount rate (Dasgupta et al. 1999). The social planner is free to choose the investment and removal programs, \(y_h (t)\) and \(y_x (t)\) respectively, to maximize social welfare over an infinite horizon (sensuHoran et al. 2011). \(C(y_h)\) is the time varying cost of habitat enhancement. \(B_y (y_x)\) represents social benefits from non-conservation activities that adversely affect the target population. \(B_x (x)\) measures the stream of social benefits from species conservation, e.g., existence value. \(\dot{x}\) and \(\dot{h}\) refer to population and habitat quality dynamics respectively [see Eqs. (1) and (3)].
2.3 Solving the social planner problem
Assuming states and controls are bounded to be non-negative, problem (4) can be solved for the optimal rate of investment in habitat enhancement (\(y_h\)) and take of species (\(y_x\)). Exploring the parameter space in (4) is helpful for identifying conditions that lead to a no-take corner solution (i.e. when \(y_x\) optimally equals 0). An optimal corner solution is interpretable as ESA regulation being socially optimal. In order to ease derivation and interpretation of necessary conditions characteristic of solutions to problem (4) we use linear approximations and specify the economic functional forms as,
where \(p_x, p_y\), and \(c\) are all constants. All other functional forms used in this study are provided in Table 1. Sensitivity to these functional assumptions is tested in Sect. 4.
To solve the optimal control problem given by (4), write the current value Hamiltonian (CVH) as
The CVH is a measure of welfare (Dasgupta and Maler 2000). The CVH is not always concave in all state variables because of the Allee growth curve (see Fig. 1). However, existence of optimal controls and use of Pontryagin’s Maximum Principle is made feasible by the boundedness of \(\dot{x}\) and \(\dot{h}\) (Fleming and Rishel 1975; Fister et al. 1998). The first three terms on the RHS of the CVH (\(p_x x, p_y y_x\) and \(cy_h\)) are measured in monetary units and represent the value of take, species existence, and the cost of enhancing habitat respectively. \(\mu _x (t)\), the adjoint variable, is in units of dollars per population growth, and it is interpreted as the marginal benefit or shadow value of conserving an additional unit of the population (Lenhart and Workman 2007). \(\mu _h (t)\), is also an adjoint variable and is in units of dollars per habitat restored and represents the marginal benefit or shadow value of enhancing one more additional unit of habitat. The CVH is linear in both controls (\(y_h, y_x\)).Footnote 5 Therefore, the optimal solution is a mix of bang-bang and singular controls, depending on initial conditions (Bryson and Ho 1975; Conrad and Clark 1987).
The marginal effects of the control variables on the CVH are
where \(\sigma _h\) and \(\sigma _x\) are switching functions for habitat enhancement and take respectively. When the switching functions in Eqs. (6) and (7) vanish, both shadow value terms are constants. For habitat enhancement the optimal feedback control rule is
Similarly, the feedback rule for take is
\(\sigma _h <0\) signifies that the marginal value of enhancing habitat is negative, suggesting that it is optimal to cease improvements to habitat quality—thus, \(y_h\) is optimally set to zero. Likewise, if \(\sigma _x <0\), then no take should occur (\(y_x =0\)) because the marginal benefit of one more unit of take is negative. If \(\sigma _h >0\, (\sigma _x >0)\), then there is more value in enhancing habitat (increasing take), so \(y_h \,(y_x)\) should be set at the maximum. When one switching function vanishes but the other does not, this results in a partial singular solution. When both switching functions optimally vanish the resulting control rule is called double singular (Bryson and Ho 1975).
Necessary conditions for characterizing optimal solutions to problem (4) include the adjoint equations,
and,
Eqs. (10) and (11) are implicit equations for the optimal levels of habitat quality and population through time. Interpreting these equations helps build intuition about intertemporal tradeoffs. In the bioeconomics literature, the adjoint equations are often rewritten as “golden rules” relating the discount rate, \(\delta \), which is the marginal opportunity cost associated with forgoing investments in other sectors of the economy, to the rate of return (social benefit) from species conservation (Clark 2005):
Eqs. (12) and (13) collectively state that the optimal levels of \(x\) and \(h\) must equate the marginal opportunity cost of conservation (of forgoing \(y_x\) and investing in \(y_h\)) to the return rate at each point in time (Clark 2005). Equation (12) shows the tradeoffs associated with investing in habitat quality. In this case, \(\delta \) reflects the marginal opportunity cost of habitat enhancement. The RHS of Eq. (12) represents the marginal productivity of habitat enhancement. The first RHS term represents the percent change in the shadow value of habitat quality. The second RHS term is the normalized net gain from a marginal increase in habitat quality, which can be further separated into the marginal effects of changes in habitat on each of the state variables. The first term in the numerator of the second RHS term is the marginal value of population growth from habitat enhancement and the second term reflects a marginal cost because the rate of habitat degradation, \(\gamma (h)\), is greater for higher levels of habitat quality (effectively, there is more to lose).
Equation (13) is the golden rule equation related to population growth, where \(\delta \) is interpreted as the marginal opportunity cost of conserving one additional unit of the population. The first RHS term represents the percent change in the shadow value of population growth. The second RHS term is the marginal productivity of the population and could be positive or negative depending on the magnitude of \(x\). Concave regions of the Allee growth curve, where \(x\in (m(h),n(h))\), imply decreasing returns to population growth. So a sufficiently large level of marginal productivity (i.e. \(m(h)<x<x_{MSY})\), relative to the discount rate, may signify greater value in increasing population size, while a sufficiently low level (i.e. \(x_{MSY} <x<n(h)\)) signals disinvestment in conserving individuals.
The bang-bang control combinations of \(\{0,0\}\) and \(\left\{ {y_h^{MAX} ,0} \right\} \) and the partial singular control \(\left\{ {y_h^*,0} \right\} \) are strategies corresponding to the ESA’s prohibition on take. We refer to such control combinations as no-take strategies. We are particularly interested in identifying conditions where it is optimal to employ no-take strategies. Initial conditions play a major role in characterizing optimal programs, so it is helpful to map out regions in \(x-h\) space where no-take ESA regulation is the optimal strategy. It is also helpful to highlight regions where ESA regulation is not optimal. The boundaries of these regions will be defined by optimal partial singular arcs. Therefore, a first step in exploring both scenarios is to identify the double singular scenario, when \(\sigma _h\) and \(\sigma _x\) both optimally vanish.
Solutions to autonomous, infinite-horizon, linear-control problems generally include the use of bang-bang controls along the path to a long-run steady state solution, at which point the extreme control value (lower or upper bound) switches to the singular value (Lenhart and Workman 2007). Equations (8) and (9) suggest that paths to an optimal steady state solution may also involve one (or more) of the four partial singular solutions, where one control switches to follow a singular arc or value while the other remains at a corner. The control following the singular arc must be continuously adjusted according to a nonlinear feedback rule much like the solution to a nonlinear control problem (Horan and Wolf 2005; Fenichel and Horan 2007; Fenichel et al. 2010). Different combinations of finite-time optimal bang-bang and partial singular solutions are employed along the path to a double singular, steady state solution (Fenichel and Horan 2007; Horan et al. 2011). Thus exploring the double singular scenario coincides with the overall goal of identifying optimal ESA regions because no-take strategies may be optimal for a finite-time along the optimal path to a double singular solution. Moreover, the existence of an optimal interior solution is a realistic baseline suggesting that long-run management goals will consist of conservation and non-conservation activities, as both are socially beneficial uses of public land.
In what follows, we derive partial singular solutions as a preliminary step to analyzing no-take strategies such as \(\left\{ {y_h^*,0} \right\} \) and characterizing finite-time optimal paths to the double singular solution. The general form of the double singular solution is then calculated. Lastly, we consider a numerical example in order to illustrate optimal paths to the long-run equilibrium from different areas of the state space, with emphasis on regions suggestive of ESA regulation.
2.3.1 Deriving partial singular solutions
Consider the singular solution for habitat quality, conditional on a nonsingular level of take (i.e. upper or lower bound). In this case \(\sigma _h\) vanishes, which implies,
Substituting Eq. (14) into Eq. (10) and solving for \(\mu _x\) yields,
By using Eqs. (1), (3), and (15), and the derivative identity \(\dot{\mu _x }=(\partial \mu _x /\partial x)\dot{x}+(\partial \mu _x /\partial h)\dot{h}\), we rewrite Eq. (11) as,
Solving this equation for \(y_h\) yields,
Eq. (16) represents a nonlinear feedback control rule that is the partial singular solution for habitat enhancement conditional on a nonsingular level of take.
We now consider the singular solution for take. When \(\sigma _x\) vanishes
Substituting the results of Eq. (17) into Eq. (11) and solving for \(\partial G/\partial x\) yields,
Eq. (18) is a special case of the golden rule equation given in Eq. (13). The modified golden rule suggests that a necessary condition for characterizing a singular solution for take is that the discount rate must equal the marginal growth of the target population plus the ratio of conservation to non-conservation related benefits.
The sign on the RHS of Eq. (18) is indicative of population magnitude in the long run. For any given value of \(h\), Eq. (18) can only hold for a single unique value of \(x\).Footnote 6 So for a higher discount rate or greater value of take, fewer individuals are conserved and the population converges to a steady state solution between the Allee threshold (\(m(h)\)) and \(x_{MSY}\). For a greater value of existence, a larger population is conserved with the optimal level occurring between \(x_{MSY}\) and the carrying capacity, \(n(h)\).
Equation (18) implies that the marginal growth rate of the population (\(\partial G/\partial x\)) must be constant so calculating the total time derivative of this term yields,
Solving for \(y_x\),
Eq. (20) gives the partial singular solution for take conditional on a nonsingular level of habitat enhancement.
2.3.2 Deriving the double singular solution
In order for a double singular solution to exist, both switching functions must vanish simultaneously. Suppose habitat enhancement (\(y_h\)) is on a singular path and the adjoint condition for habitat quality is also satisfied (i.e. \(\mu _h =c, \dot{\mu _h } =0)\), then Eq. (10) can be rewritten in terms of \(\mu _x\), which is given by Eq. (15). Now suppose the switching function for the target population also vanishes, so \(\mu _x =p_y\); substituting this equation into Eq. (15) yields,
Eq. (21) represents the switching function for take conditional on a singular solution for habitat enhancement. Contrary to Fenichel and Horan (2007), Fenichel et al. (2010), Sanchirico et al. (2010), and Horan et al. (2011), who all explore similar multi-state linear control problems, the derivation of the singular arc given in Eq. (21) does not depend on both adjoint conditions; we later use this information to develop alternate proofs for the absence of certain solutions.
The switching function for habitat enhancement conditional on a singular solution for take is similarly derived. Suppose take, \(y_x\), is on a singular path and the adjoint for species holds (i.e. \(\mu _x =p_y , \dot{\mu _x}=0\)), then Eq. (11) can be rewritten in terms of \(\delta \) [see Eq. (18)]. Let the switching function for habitat also vanish and the corresponding adjoint is also satisfied, so \(\mu _h =c\, (\dot{\mu _h } =0)\); substituting this equation into Eq. (10) and solving for the discount rate yields,
Eq. (22) yields another version of the golden rule result with respect to the optimal level of habitat quality; this result is similar to Eq. (12). The RHS of Eq. (22) is a rescaling of the marginal benefit of take driven by an increase in habitat quality (the first RHS term) minus the marginal cost of habitat enhancement (the second RHS term). Thus, a necessary condition for the existence of double singular solutions is that the discount rate must equal the marginal net benefit of habitat enhancement. Substituting Eq. (22) back into Eq. (18) yields,
Eq. (23) represents the switching function for habitat enhancement conditional on a singular solution for take. While this is not the case for \({\sigma _x } |_{\sigma _h =0} =0\), the derivation of \({\sigma _h } |_{\sigma _x =0} =0\) is dependent on both adjoint conditions. Combining Eqs. (21) and (23) yields a well-defined system of two equations and two unknowns with, at most, a finite number of solutions. Solving the coupled system yields the double singular solution.
3 Results and discussion
3.1 Numeric example
Constructing illustrative examples of solutions to problem (4) using bang-bang controls and the singular feedback rules is a numerical exercise (Arrow 1968). We bound the space of possible outcomes by considering a particular set of parameter combinations that highlight the existence of an interior, double singular steady state solution (Table 2). Sanchirico et al. (2010) employ a similar strategy when studying the effects of spatial configuration on optimal harvest trajectories and switching times in metapopulation fisheries. The growth rate, minimum and maximum carrying capacity are calculated based on Hosack et al.’s (2002) population viability analysis for pronghorn. Hosack et al. (2002) find that the probability of extinction increases markedly for populations lower than 100 individuals; we use this value to guide parameterization for the Allee threshold. Other ecological parameters are chosen to allow for the existence of a positive, interior DSS. Economic parameters in this general study were chosen to reflect the relative values of certain activities to others. We employ the common assumption of a 5 % discount rate.
The maximal take rate is set to reflect reasonable large incentives for people to engage in take related activities in the absence of other management, and such levels of take drive the population to extinction despite other model inputs (Table 2). This allows a population of any size to transition from persistence to extinction over a period of time as a result of overexploitation; the reality for many T&E species. The maximal rate of habitat enhancement is set large enough to drive arbitrarily small populations to carrying capacity, which occurs only in the absence of a maximal take rate. This mimics the potential recovery of declining populations; much like pronghorns in Nebraska (Hoffman et al. 2010).
For parameter values in Table 2, the switching curves given in Eqs. (21) and (23) intersect at a single point, denoted DSS (Fig. 3). The DSS equilibrium satisfies the above necessary conditions as well as Kelley’s condition, a second-order necessary condition for the optimality of singular arcs (Bryson and Ho 1975). So the DSS equilibrium is a candidate long run solution. This suggests that there are regions of the state space where a no-take, ESA-style strategy is not long-run optimal. Nevertheless, a no-take strategy may be optimal along a path to the DSS equilibrium; therefore we determine the optimal approach paths to the DSS equilibrium from all arbitrary points on the \(x-h\) state space.

Switching curves for habitat enhancement \((\sigma _h|_{\sigma _x =0} =0)\) and take \((\sigma _x|_{\sigma _h =0} =0)\). The intersection of both curves, at DSS, gives rise to a double singular solution
3.1.1 Bang-bang controls
Bang-bang control combinations can only be optimal as temporary strategies along the path to the DSS equilibrium. Bang-bang controls include no-take strategies (\(\left\{ {0,0} \right\} \) and \(\left\{ {y_h^{max} ,0} \right\} \)), the no-regulation scenario (\(\left\{ {0,0} \right\} \)) discussed in Subsect. 2.1, and \(\left\{ {y_h^{max} ,y_x^{max} } \right\} \). \(\left\{ {0,0} \right\} \) and \(\left\{ {y_h^{max} ,0} \right\} \) can be interpreted as the extremes of ESA regulation with the former representing a scenario where take alone is fully restricted and the latter a situation where agencies must fully invest in habitat enhancement in addition to halting all take. \(\left\{ {y_h^{max} ,y_x^{max} } \right\} \) reflects another extreme where agencies conduct conservation and non-conservation activities simultaneously at the maximum possible level; this management scenario may be the case for large, valuable unlisted or recovered populations on multi-use federal lands.
3.1.2 Partial singular solution for habitat enhancement, maximum take-\(\left\{ {y_h^*,y_x^{max} } \right\} \)
Large populations in increasingly degraded habitat are also at risk of future population decline (see top-left region of Fig. 2). A feasible strategy may include harvesting down the population for profit while simultaneously engaging in habitat enhancement to reduce the Allee threshold. The strategy \(\left\{ {y_h^*,y_x^{max} } \right\} \) achieves this result. The partial singular solution for habitat enhancement conditional on the maximum level of take, Eq. (16), is substituted back into the equations of motion in Eqs. (1) and (3). This case yields one saddle point steady state solution, denoted PSS1 (‘PSS’ denotes partial singular solution). The singular path leading to PSS1, denoted \({\sigma _h } |_{y_x^{max} } =0\), intersects the switching curve \({\sigma _x } |_{\sigma _h =0} =0\) necessarily implying a double singular solution does exist, denoted DSS1 (Fig. 4a). Ultimately, DSS1 cannot be optimal and is discarded because, as discussed above, the adjoint equation for species is not satisfied along \({\sigma _x } |_{\sigma _h =0} =0\). We are able to locate a feasible singular path, denoted PSP1, in this scenario leading to the DSS equilibrium (‘PSP’ stands for partial singular path). Along this path, management sets take at the maximum level and switches to the singular value for take once the DSS equilibrium is reached (Fig. 4b).

a The partial singular solution for \(y_h\) conditional on \(y_x^{MAX}\) with a superimposed sketch of the switching curves characterizing the double singular solution DSS. PSS1 and DSS1 are ruled out as long-run optimality candidates. b Phase dynamics for the current scenario and an illustration of the partial singular path (PSP1) leading to DSS. ‘PSP’ stands for partial singular path
3.1.3 No habitat enhancement, partial singular solution for take-\(\left\{ {0,y_x^*} \right\} \)
This case represents a scenario where the manager allows a restricted level of take but does not invest in habitat enhancement. Similar to the no-regulation scenario, this case yields no interior solutions, as the population cannot survive in the long run without upkeep of its habitat.Footnote 7 However, a feasible singular path leading to the DSS equilibrium exists, PSP2 (Fig. 5). Along this path, managers do not invest in habitat enhancement but switch to its singular value once the DSS equilibrium is reached.

Phase dynamics for the scenario with no habitat enhancement and a partial singular solution for take-\(\left\{ {0,y_x^*} \right\} \). PSP2 is the partial singular path leading to DSS
3.1.4 Maximum habitat enhancement, partial singular solution for take-\(\left\{ {y_h^{max} ,y_x^*} \right\} \)
The partial singular solution with maximum habitat enhancement and regulated take represents the idea of habitat conservation plans (HCPs) under the ESA. HCPs are a joint partnership between federal and non-federal entities to conserve land critical to the survival and growth of a listed species. HCPs allow agencies some level of incidental take when conducting valued, species-adverse activities—so long as the general procedure is ‘minimizing and mitigating’ the level of take (DOI 1996; Kareiva 1999).
The mathematical representation of the HCP scenario yields one saddle point steady state solution, denoted PSS3 (Fig. 6a). The singular path leading to PSS3, denoted \({\sigma _x } |_{y_h^{max} } =0\), does not intersect any switching curves, thus leaving PSS3 as the only candidate long-run solution in this scenario, other than the DSS equilibrium (Fig. 6a). Right above PSS3 is PSP2, the singular arc for \(\left\{ {0,y_x^*} \right\} \) (see Fig. 6a). We assess the optimality of PSS3 by considering a shift towards path PSP2 and reevaluating the CVH; an optimal PSS3 should maximize the CVH (Rondeau 2001; Horan et al. 2011). At PSS3, \(\dot{h}=G(h^{PSS3}, x^{PSS3})-y_x^*=0\) and \(y_h =y_h^{max}\), this yields,
Consider the alternate strategy of moving upwards from PSS3 to partial singular path PSP2, this requires management to set \(y_x\) to zero (\(y_h\) stays fixed at \(y_h^{max}\)), which implies \(\sigma _x =p_y -\mu _x^{alt} <0\), where \(\mu _x^{alt}\) is the alternate shadow value of species corresponding to the shift towards path PSP2 (Eq. 9). The CVH associated with this alternate strategy, evaluated at PSS3, is,
Recall that \(x^{alt}\) is the new population level attained from halting take and \(x^{alt}>x^{PSS3}\) (see Fig. 6a). Taking the difference of Eqs. (24) and (25) yields,

Phase plane dynamics for scenario involving the partial singular solution for take and maximum habitat enhancement \(\{{y_h^{MAX} ,y_x^*}\}\). a PSS3 is not an optimal long run candidate because management is better off moving to PSP2. b PSP3 is the partial singular path leading DSS
PSS3 cannot be optimal because a shift in strategies away from the PSS3 saddle towards PSP2 increases the value of the CVH. We are able to locate a feasible singular path, denoted PSP3, in this scenario leading to the DSS equilibrium; along this path, management sets habitat enhancement at the maximum level and switches to the singular value once the DSS equilibrium is attained (Fig. 6b).
3.1.5 Partial singular solution for habitat enhancement, no take-\(\left\{ {y_h^*,0} \right\} \)
It is common for agencies to invest in habitat (e.g., water fixtures and food plots in the case of pronghorn) as part of conservation under the ESA in addition to prohibiting take. The partial singular solution associated with this case yields one saddle steady state solution, denoted PSS4. Like the previous partial singular case, the singular path leading to PSS4, denoted \({\sigma _h }|_{y_x =0} =0\), does not intersect any switching curves, so PSS4 is the only candidate long-run solution in this scenario. However, using the same method employed in the previous subsection, we eliminate PSS4 as an optimal long run candidate by considering the alternate strategy of moving directly to PSP3. PSS4 is not optimal because there is positive value in moving away to PSP3. Furthermore, there is no partial singular path to the DSS equilibrium in this scenario because all values on the proposed singular arc imply negative investments in habitat enhancement, which is not feasible given model specifications.
3.1.6 Optimal feedback control diagram
The feedback control diagram in Fig. 7 illustrates optimal control strategies from any initial value in the \(h-x\) state space. The three partial singular paths partition the feedback control diagram into 6 distinct regions where different bang-bang and partial singular controls are optimal.Footnote 8 Depending on the initial condition, the optimal path is governed by a possible mixture of bang-bang and partial singular controls leading to the DSS equilibrium. If a bang-bang trajectory intersects a partial singular path prior to reaching the DSS equilibrium, then the partial singular path is followed to the DSS equilibrium.

The optimal feedback control diagram for the complete market scenario. The Allee curve (dashed) is included to illustrate optimal control strategies relative to different initial conditions in the state space
There is no region of the state space where it is optimal to fully restrict take without actively investing in habitat improvement (Fig. 7); the \(\{0,0\}\) strategy is never optimal. The payoff from the \(\{0,0\}\) strategy is lower compared to the combination of other bang-bang controls (see Table 3); this is due to the delay in reaching the long-run optimum and the restriction on take from non-conservation activities. But for initial conditions in the region below PSP1 and PSP2, which we refer to as the ESA region, ESA regulation (i.e. \(\left\{ {y_h ,y_x } \right\} =\{y_h^{MAX} ,0\})\) is part of the optimal strategy along the path to the DSS equilibrium. Moreover, the area below PSP1 and PSP2 may represent regions of potential concern for wildlife populations. The bottom-most portion of the ESA region indicates initial conditions of low population abundance, where individuals may be below the Allee threshold. The left-most portion of the ESA region represents initial conditions with relatively low habitat quality, where individual survival is low due to resource limitations. Both sets of initial conditions are indicative of a population that may be considered threatened or endangered.
ESA regulation on federal lands is primarily characterized by take restriction and investment in activities that help maintain/improve habitat quality for endangered populations. However, ESA regulation is not the long-run solution to conservation. Results suggest it is optimal to switch to a singular arc (PSP1 or PSP2) along the path to long-run optimum DSS (Fig. 7). Along both these singular arcs management regulation is relaxed, some take is optimal and investments in habitat enhancement begin to phase out.
The qualitative results are not highly sensitivity to parameterization. Sensitivity analysis on the baseline parameters suggests that a unique, positive double singular solution always exists with a feedback diagram qualitatively similar to Fig. 7 (Table 4). However, the location of the DSS equilibrium in state space changes.
3.2 Recovery and post-recovery under the ESA
Developing optimal recovery plans requires the early establishment of long-run post delisting plans (Rondeau 2001; Mehta et al. 2007; Homans and Horie 2011). The DSS is the long-run optimal equilibrium when the social planner endogenously determines the equilibrium population size (4). However, real systems lack the ability to internalize conservation benefits. Recovery criteria are often established, but a post-recovery management program must provide incentives for the broader economic system to maintain those criteria without ESA protection. For example, the development and approval of a state management plan to guide post-recovery management of gray wolves enabled delisting in areas of Montana and Idaho. Both states restored seasonal hunting and trapping with set quotas, and both states allow culling to reduce predation pressure on livestock. Harvest and control of wolves in Montana and Idaho benefits hunters and farmers respectively, but is managed so that wolf populations remain above a federally prescribed level as per ESA post-delisting monitoring requirement (FWS 2011a). These regulatory mechanisms create positive post-delisting marginal value for wolves, \(\mu _x\).
Incentives associated with post-recovery management potentially establish a long-run equilibrium and salvage value of the stock, \(V(\hat{h}, \hat{x})\), where the carat indicates the state variable values at delisting. The value of \(V\) may differ from that established when the state variables are at the DSS. The adjoint variable \(\mu _x\) must approach this marginal value of the stock post delisting smoothly so that \(\mu _x =\partial V(h,x)/\partial x\). The marginal value of stock just prior to recovery, while under ESA protection, must be equivalent to the value of stock post recovery without ESA protection.Footnote 9 Then the optimal recovery path is found in a backwards recursive fashion using Eqs. (8)–(11). A necessary condition for finding the optimal path to recovery is knowledge of post-recovery management plans and how these plans structure \(V(h,x)\).
In the absence of post recovery planning, the ESA can create a system where a marginal increase in the population, \(\mu _x\), has a strictly positive marginal value up to the point of delisting, but when protection is removed the marginal value of an increase in the population is zero or negative—creating a discontinuity. Delays in adopting a post-recovery plan in accordance with federal conservation goals, that implicitly maintained a positive value on an increase in the wolf population, stalled delisting of the gray wolf in Wyoming until recently (FWS 2005a, 2011a).
If management plans generate incentives for a positive salvage value and non-extinction equilibrium, then the qualitative results in the feedback control diagram (Fig. 7) would not change. All recovery paths initiated in the ESA region undergo a shift in strategy as bang-bang trajectories merge onto partial singular paths, apart from one unique trajectory leading directly to the long run equilibrium (Fig. 7). PSP1 and PSP2 represent second-phase strategies that allow agencies some level of take when conducting non-conservation activities (i.e. \(y_x \ge 0\)).
The true salvage value for many federal land managers is likely managerial flexibility. Regional HCPs can increase flexibility while maintaining a positive value on increases in the species population. Results from Sect. 3 suggest HCPs are used as management strategies in the latter stages of species recovery but HCPs may be de facto recovery plans for many listed species.Footnote 10 However, the stated goals of these plans have to do more with reduction in harmful activities and processes than the actual recovery of a listed species. Therefore, HCPs have come under some scrutiny (see Langpap and Kerkvliet (2012) for a discussion).
The continued development and implementation of comprehensive HCPs could serve to guide management from strict ESA-style management to post-recovery management. HCPs allow for the discussion of tradeoffs in the implementation of conservation and non-conservation activities. Management plans like HCPs phase out the restrictive regulations of the ESA and allow more flexibility to federal agencies but not necessarily at the expense of species survival.
4 Functional uncertainty analysis
Having developed intuition using linear approximations, we now systematically test the generality of our results with nonlinear economic and ecological sub-functions. In each of the following scenarios, we calibrate model parameters so that equilibrium stock and habitat, along with corresponding marginal benefits and costs, remain unchanged (Table 2) (Rondeau 2001). This calibration allows us to focus on the local qualitative differences arising from choice of functional form rather than parameter perturbation.
4.1 Nonlinear benefit function
In the baseline model we assume marginal benefits from wildlife are constant to enhance tractability. However, it is reasonable to expect the marginal benefit from conserved wildlife to diminish as the population grows. Diminishing marginal benefits to increasing population size has no qualitative impact on our results. Consider the common functional form used to model existence value (Freeman 2003),
where \(b_x\) converts the population to a non-dimensional density and \(p_x \) monetizes the density. The associated current value Hamiltonian is
In re-solving problem (4) with nonlinear benefit function (26), note that the corresponding Hamiltonian is still linear in both controls and there remains one unique double singular solution, denoted DSSA. Furthermore, the only optimality condition that is affected by the change is the equation for \(\dot{\mu }_x\); all other optimality conditions remain unchanged. The optimal feedback control diagram corresponding to the new management problem is similar to the original (Fig. 8). The same partial singular combinations serve as trajectories to DSSA. The qualitative differences between Figs. 7 and 8 result from how the logarithm function affects the adjoint conditions.

The optimal feedback control diagram assuming nonlinear existence value
We use similar arguments as before to identify feasible and optimal approach paths. We rule out alternate equilibria from the \(\left\{ {y_h^*,y_x^{max} } \right\} \) and \(\left\{ {y_h^{max} ,y_x^*} \right\} \) scenarios and establish PSP1A and PSP3A (respectively) using an argument similar to the one detailed in Subsect. 3.1.4. The \(\left\{ {0,y_x^*} \right\} \) scenario does not produce any equilibria but does give rise to PSP2A. The potential equilibrium solution in the \(\left\{ {y_h^*,0} \right\} \) scenario is ruled out because it violates the adjoint associated with \(\mu _x\) (we discuss an identical case in Subsect. 3.1.2) and a positive, partial singular path to the unique double singular solution does not exist.
One marked difference between Figs. 7 and 8 comes in the positioning of PSP1 and PSP1A. Figure 8 shows that the no-take control combination is optimal across a larger region of the \(h-x\) state space, replacing some areas where take, at the maximal level, was permissible. This result stems from the assumption, imposed by a logarithmic benefits function, that the marginal value of an individual increases as the population dwindles. In sum, nonlinear benefits from conservation enhance the importance of ESA-style no-take restrictions, \(\left\{ {y_h^{max} ,0} \right\} \), as part of an optimal recovery program. However, nonlinear benefits are not sufficient for no-take restrictions to be the long-run optimal equilibrium solution.
4.2 Nonlinear cost of habitat investment
In the baseline model we assume the marginal cost of habitat investment is constant to enhance tractability. Now consider the case with quadratic habitat enhancement costs. In this case the current value Hamiltonian for the problem is
The problem is nonlinear in \(y_h\), but remains linear in \(y_x\). Therefore, \(y_x\) can take on extreme values (e.g., \(y_x =0\) or \(y_x =y_x^{max}\)) or be singular with \(y_x =y_x^*\), but \(y_h\) cannot be bang-bang, but is still constrained to be positive. First, consider the instances where \(y_x =y_x^*\). In this case,
Additionally, adjoint conditions (10)–(11) must continue to hold.
The four optimality conditions along with the equations of motion define a system of six equation and six unknowns that lead to equilibria that satisfy the necessary conditions for a singular solution to be optimal, if one exists. Our calibration suggests two candidate equilibria. From Eq. (29), \(\mu _x\) is constant \(\forall t\), conditional on the solution for \(y_x\) being singular. Therefore, \(\dot{\mu }_x=0 \,\forall t\), which defines an implicit function \(h(t)=h(x(t))\). Since \(\mu _x\) is constant if \(y_x\) is optimally singular, \(x\) must optimally correspond to the value \(\mu _x\). The fact that \(\dot{\mu }_x\) is always zero for a singular solution means that there can be no singular arc associated with \(y_x\). The only feasible singular values for \(y_x\) are equilibrium values. However, for any values except the equilibrium values, \(\mu _h\) will change leading to changes in \(h\) that do not correspond to \(h(t)=h(x(t))\). The only options are for the system to move to a region where \(y_x =0\) or \(y_x =y_x^{max}\) is optimal. This suggests that no-take, ESA-style solutions are part of the optimal strategy with nonlinear habitat enhancement costs for at least some initial conditions.
Consider the nature of the solution for \(y_x =0\). This illustrates how the optimal habitat investment program could be recovered conditional on an ESA-style, no-take strategy. A similar solution approach can be applied to the \(y_x =y_x^{max}\) case. First, set \(y_x =0\). Equation (29) no longer holds and \(\mu _x\) is non-constant. We know that \(\mu _x >p_y\) for \(y_x =0\). Using Eq. (30) find \(d\mu _h /dt\) and \(\partial ^{2}\mu _h /\partial \mu _h^2\). These two expressions are functions of \(\dot{y}\) and \(\ddot{y}\). Also, use Eq. (10) to find \(\ddot{\mu }_h\), where we use the two alternative notations to indicate different paths to equivalent expressions. Next, set \(\dot{\mu }_h\) from Eq. (10) equal to \(d\mu _h /dt\) and solve for \(\mu _x =\mu _x (x,h,y,\dot{y})\). Differentiate this expression with respect to time and set the result equal to the RHS of Eq. (11), and solve for \(\ddot{y}_h\). Setting \(\partial ^{2}\mu _h /\partial \mu _h^2 =\ddot{\mu }_h\) also yields an expression for \(\ddot{y_h}\). Finally, set these two expressions for \(\ddot{y}\) equal and solve for \(\dot{y}=\dot{y}_h (x, h, y)\). Using this equation for the change in \(y\) and the two equation of motion for the state variables other candidate long-run equilibria could emerge. If one of these equilibria dominated the singular equilibria, then ESA no-take regulations could persist indefinitely on an optimal program. Numerical analysis does not suggest that this is the case for our case study.
By exploring non-singular solutions it is also possible to rule out candidate singular equilibria. These equilibria must be approached using an extreme value of \(y_x\) because no singular arc exists. Moreover, there cannot be discontinuities in \(\mu _x\) at the point in state space where the optimal control switches from \(y_x =0\) to \(y_x =y_x^*\). In our numerical analysis only one of the two candidate singular equilibria satisfies this criterion.
4.3 Intrinsic growth of habitat quality
Express the equation of motion for habitat implicitly as \(\dot{h}(h, y_h)\). In our base calibration we set \(\omega \) to zero and that implies \(\dot{h} (h, 0)<0\) for \(h>0\) (Table 2). That is, we require habitat to vanish without intervention. We have assumed that prevailing anthropogenic forces will erode wildlife habitat without intervention. This may be true for many threatened and endangered species. However, it is also possible that habitat could recover without investment, albeit at a slower rate than current human impacts draw down habitat.
Consider the case where \(\omega \in (0,\alpha _g)\) so that habitat stabilizes at a positive level without habitat investment. In this case the current value Hamiltonian remains qualitatively unchanged from Eq. (5). From the conditions that influence the optimal solution, \(\omega \in (0,\alpha _g)\) only changes \(\dot{\mu }_h\). Furthermore, introducing \(\omega \in (0,\alpha _g)\) does not change the number of roots for any state, adjoint, or control variable. Therefore, the system could be re-parameterized to arrive at the same equilibrium as our baseline calibration. The effect is similar to the nonlinear existence value scenario—the approach paths to a positive, double singular solution are qualitatively similar but the criteria for disregarding other equilibrium solutions change.Footnote 11 Furthermore, naturally recovering habitat does not reduce the need for ESA-style, no-take restrictions over part of the recovery program. However, it is possible that a long-run optimal equilibrium exists without habitat investment. For a given parameterization it is more likely that the optimal long run solution will involve no habitat investment as \(\alpha _g -\omega \) declines to zero from above.
5 Conclusion
Regions of the state space characteristic of at-risk populations (i.e. the ESA region) correspond to regions where ESA regulations can be socially optimal. Populations located in the ESA region face possible extinction, but positive long-run valuation drives recovery via the cessation of all harmful activities and full investment in habitat enhancement. ESA implementation is optimal in some scenarios. The regulatory power of the act serves as a preliminary form of protection for endangered populations. However, ESA regulation is only a short-term solution to the management problem. Emphasis should be placed on constructing the second-phase management plan early on in the initial recovery process, as the designation of a post-recovery plan is essential for the timely delisting and continued conservation of target populations. This means that managers trying to mimic the socially-optimal result would need to know the characteristics and benefits of the long run equilibrium or choose the long run equilibrium endogenously, e.g., solve for the DSS, in order to define an adequate recovery plan. This is an important preliminary step in the management problem. But our experience is that post-recovery planning is largely neglected, and most effort is focused on measuring the current population and tactical short-term interventions.
Our formal finding can be summarized by a common saying, “you can’t get there, if you don’t know where you are going.” This is somewhat complicated in the case of species conservation because “where we are going” involves tradeoffs between conservation and non-conservation activities. Society values species existence as well as products from non-conservation activities on federal lands, so the most likely long-run solution is where both management activities coincide (Rondeau 2001). An interior double singular solution reflects this thinking. In order to realize this long-run outcome, mechanisms must be in place to ensure recovered populations and their habitat stay protected over larger time-scales in the wake of other land-use activities. HCPs could function as the glide path towards a more long-term management solution. Regional HCPs increase managerial flexibility and incentivize population growth.
Although delisted, or otherwise stable, populations are not the main targets for HCPs, they can be included as part of a larger plan to conserve wide ranges of habitat; some regional HCPs are already developed this way (DOI 1996). Multi-agency HCPs could be made more expansive by giving federal land managing agencies a primary role in region-wide conservation efforts. HCPs could also be made more appealing to the public (especially private landowners) through incentive-based schemes like ‘no surprises’, ‘safe harbor’ and ‘candidate conservation’ agreements that support species conservation. HCPs may not be the ultimate solution to species conservation, but they remain an important stepping-stone towards a long-run conservation solution.
Notes
Similar large-scale anthropogenic changes to the biosphere impact other endangered species. These may include introduction of novel predator and parasites, competitors for nest sites.
At a minimum, reserve areas reflect forgone earnings that could have been made developing land. Such continuing costs should be accounted for in conservation planning.
For \(h>h_{crit}\) the Allee threshold and carrying capacity, \(m(h)\) and \(n(h)\) respectively, are necessarily real valued functions such that \(m(h)<n(h)\) (Fig. 1a). When \(h=h_{crit}\), the Allee threshold and the carrying capacity coalesce (i.e. \(m(h_{crit})=n(h_{crit})\)). When habitat quality falls below the critical threshold (i.e. \(h<h_{crit}), m(h)\) and \(n(h)\) become imaginary, which can be biologically interpreted as a scenario where the Allee threshold and carrying capacity do not exist, and extinction is the only long-term outcome from any initial condition (Fig. 1b).
Clark (2005) states that linear control models serve as approximations to more general convex/concave problems and this simplification is useful for researchers seeking qualitative insight. Sanchirico et al. (2010) add that qualitative results from approximate linear control models “generally carry over” to their less-restrictive, nonlinear counterparts.
Stopping direct take, without habitat enhancement, is insufficient for the recovery or maintained recovery of many T&E species. Allowing take of pronghorn without investment in habitat improvements to battle droughts, predation, etc. still leaves the population in significant risk of decline. Another case where active, continual habitat management appears necessary is on public lands in Oregon, Washington, and California, where conservation is focused on northern spotted owls. FWS recently sanctioned the removal of the invasive barred owl from northern owl habitat and reduced public timber harvests (FWS 2011b).
For illustrative purposes, we assume impulse controls are feasible (i.e. singular values for the controls, and subsequently the bounds as well, can get arbitrarily large) as this simplifies the derivation of the partial singular solution leading to the long-run optimal solution. This assumption does not change the qualitative result, and the use of impulse controls is common in other studies involving the analysis of infinite-horizon, linear control problems (Sanchirico et al. 2010; Horan et al. 2011).
Some studies actually suggest that species with HCPs tend to recover faster and are delisted in a shorter period—though it is unclear if faster recovery is a direct effect of the HCP (Langpap and Kerkvliet 2012).
In one specific calibration, where \(\omega =\alpha _g /2\), the optimal feedback control diagram is identical to Fig. 8. But in this case we rule out alternate equilibria from the \(\{y_h^{*}, y_x^{max}\}\) scenario because it violates the adjoint associated with \(\mu _x \). Equilibria from the \(\{y_h^{*}, 0\}\) scenario are discarded using arguments from Subsect. 3.1.4 and a positive path to the double singular solution still does not exist.
References
Arrow K (1968) Optimal capital policy with irreversible investment. In: Wolfe JN (ed) Value, capital, and growth, papers in honour of Sir John Hicks. Edinburgh University Press, Edinburgh, pp 1–19
Barbier E, Schulz C (1997) Wildlife, biodiversity and trade. Environ Dev Econ 2:145–172
Barnes JI (1996) Changes in the economic use value of elephant in Botswana: the effect of international trade prohibition. Ecol Econ 18:215–230
Bean MJ (1998) The Endangered Species Act and private land: four lessons learned from the past quarter century. Envtl L Rep 28:10701–10710
Bean MJ, Wilcove DS (1996) Ending the impasse. Envtl. Forum 13:22–29
Brock W, Kinzig A, Perrings C (2009) Modeling the economics of biodiversity and environmental heterogeneity. Environ Resour Econ 46:43–58
Brown GMJ, Shogren JF (1998) Economics and the endangered species act. J Econ Perspect 12:3–20
Bryson AE, Ho YC (1975) Applied optimal control: optimization, estimation, and control. Hemisphere Publishing, New York
Clark CW (2005) Mathematical bioeconomics, the optimal management of renewable resources, 2nd edn. Wiley, Hoboken
Coggins GC, Wilkinson CF, Leshy JD (1993) Federal public land and resources law, 3rd edn. The Foundation Press, Westbury, New York
Conrad JM, Clark CW (1987) Natural resource economics notes and problems. Cambridge University Press, New York
Courchamp F, Clutton-Brick T, Grenfell B (1999) Inverse density dependence and the Allee effect. Trends Ecol Evol 14:405–410
Dasgupta P, Maler K-G (2000) Net national product, wealth, and social well-being. Environ Dev Econ 5:69–93
Dasgupta P, Maler K-G, Barrett S (1999) Intergenerational equity, social discount rates and global warming. In: Portney P, Weyant J (eds) Discounting and intergenerational equity. Resources for the Future, Washington DC
Eichner T, Pethig R (2009) Pricing the ecosystem and taxing ecosystem services: a general equilibrium approach. J Econ Theory 144:1589–1616
Fenichel EP, Horan RD (2007) Jointly-determined ecological thresholds and economic trade-offs in wildlife disease management. Nat Resour Model 20:511–547
Fenichel EP, Horan RD, Bence JR (2010) Indirect management of invasive species with bio-control: A bioeconomic model of salmon and alewife in Lake Michigan. Resour Energy Econ 32:500–518
Fister K, Lenhart S, McNally J (1998) Optimizing chemotherapy in an HIV model. Electron J Differ Eq 32:1–12
Fleming W, Rishel R (1975) Deterministic and stochastic optimal control. Springer, New York
Freeman AMI (2003) The measurement of environmental and resource values: theory and methods, 2nd edn. Resources For the Future, Washington D.C.
Godfray HCJ (2011) Food and biodiversity. Science 333:1231–1232
Hoffman JD, Genoways HH, Jones RR (2010) Factors influencing long-term population dynamics of pronghorn (Antilocapra americana): evidence of an Allee effect. J Mammal 91:1124–1134
Hood LC (1998) Frayed safety nets: conservation planning under the Endangered Species Act. Defenders of Wildlife, Washington, D.C.
Homans F, Horie T (2011) Optimal detection strategies for an established invasive pest. Ecol Econ 70:1129–1138
Horan RD, Wolf CA (2005) The economics of managing infectious wildlife disease. Am J Agr Econ 87:537–551
Horan RD, Fenichel EP, Drury KLS, Lodge DM (2011) Managing ecological thresholds in coupled environmental-human systems. P Natl Acad Sci-Biol 108:7333–7338
Hosack DA, Miller PS, Hervert JJ, Lacy RC (2002) A population viability analysis for the endangered Sonoran pronghorn, Antilocapra americana sonoriensis. Mammalia 66:207–229
Innes R, Polasky S, Tschirhart J (1998) Taking, compensations and endangered species protection on private lands. J Econ Perspect 12:35–52
Kareiva P et al (1999) Using science in habitat conservation plans. American Institute of Biological Sciences, Washington, D.C.
Kellner JB, Sanchirico JN, Hastings A, Mumby PJ (2011) Optimizing for multiple species and multiple values: tradeoffs inherent in ecosystem-based fisheries management. Conserv Lett 4:21–30
Langpap C (2006) Conservation of endangered species: Can incentives work for private Landowners? Ecol Econ 57:558–572
Langpap C, Kerkvliet J (2010) Allocating conservation resources under the endangered species act. Am J Agr Econ 92:110–124
Langpap C, Kerkvliet J (2012) Endangered species conservation on private lands: assessing the effectiveness of habitat conservation plans. J Environ Econ Manag 64:1–15
Lenhart S, Workman JT (2007) Optimal control applied to biological models. In: Chapman & Hall/CRC Mathematical and Computational Biology series, Boca Raton, FL
Lewis DJ, Plantinga AJ, Nelson E, Polasky S (2011) The efficiency of voluntary incentive policies for preventing biodiversity loss. Resour Energy Econ 33:192–211
Loomis JB, White DS (1996) Economic benefits or rare and endangered species: summary and meta-analysis. Ecol Econ 18:197–206
Merrifield J (1996) A market approach to conserving biodiversity. Ecol Econ 16:217–226
Mehta SV, Haight RG, Homans FR, Polasky S, Venette RC (2007) Optimal detection and control strategies for invasive species management. Ecol Econ 61:234–245
Persha L, Aggrawal A, Chhatre A (2011) Social and ecological synergy: local rulemaking, forest livelihoods, and biodiversity conservation. Science 331:1606–1608. doi:10.1126/science.1199343
Polasky S, Costello C, McAusland C (2004) On trade, land-use and biodiversity. J Environ Econ Manag 48:911–25
Rondeau D (2001) Along the way back from the brink. J Environ Econ Manag 42:156–182
Rosenzweig ML (2003) Win-win ecology: how the earth’s species can survive in the midst of human enterprise. Oxford University Press, Oxford
Sanchirico JN, Wilen JE, Coleman C (2010) Optimal rebuilding of a metapopulation. Am J Agr Econ 92:1087–1102
Sheridan TE (2000) Human ecology of the Sonoran Desert. In: Phillips SJ, Comus PW (eds) A natural history of the Sonoran Desert. Arizona-Sonora Desert Museum Press, Tucson, pp 105–118
Shilling F (1997) Do habitat conservation plans protect endangered species? Science 276:1662–1663
Shogren JF, Tschirhart J, Anderson T, Ando AW, Beissinger SR, Brookshire D, Brown GM, Coursey D, Innes R, Meyer SM, Polasky S (1999) Why economics matters for endangered species protection. Conserv Biol 13:1257–1261
Skillen J (2009) The nation’s largest landlord: the bureau of land management in the American West. University Press of Kansas, Lawrence
Sorice MG, Haider W, Conner JR, Ditton RB (2011) Incentive structure of and private landowner participation in an endangered species conservation program. Conserv Biol 25:587–596
Stokstad E (2005) What’s wrong with the endangered species act? Science 309:2150–2152
Swanson TM, Barbier EB (1992) Economics for the wilds; wildlands, wildlife, diversity and development. Earthscan, London
Tracy CR, Averill-Murray R, Boarman WI, Delehanty D, Heaton J, McCoy E, Morafka D, Nussear K, Hagerty B, Medica P (2005) Desert Tortoise Recovery Plan Assessment. DTRPAC Report: http://www.fws.gov/arizonaes/Documents/SpeciesDocs/Desert-Tortoise/DTRPACreport.pdf. Accessed 19 Dec 2013
US Department of the Interior (DOI), U.S. Fish and Wildlife Service, U.S. Department of Commerce, National Oceanic and Atmospheric Administration, and National Marine Fisheries Service (1996) Habitat conservation planning and incidental take permit processing handbook
US Fish and Wildlife Service (FWS) (1996) Piping plover (Charadrius melodus), Atlantic Coast population, revised recovery plan. Hadley, Massachusetts
US Fish and Wildlife Service (FWS), Region 2 (2002) Recovery criteria and estimates of time for recovery actions for the Sonoran pronghorn a supplement and amendment to the 1998 final revised Sonoran pronghorn recovery plan
US Fish and Wildlife Service (FWS) (2005a) Endangered and threatened wildlife and plants; regulation for nonessential experimental populations of the western distinct population segment of the gray wolf; final rule
US Fish and Wildlife Service (FWS) (2005b) Middle Rio Grande Bosque initiative: FY 2005 Projects. http://www.fws.gov/southwest/mrgbi/Projects/2005/Table/Index.html. Accessed 25 Dec 2013
US Fish and Wildlife Service (FWS) (2007) Recovery plan for the Sierra Nevada Bighorn Sheep. California/Nevada Operations Office, US Fish and Wildlife Service
US Fish and Wildlife Service (FWS) (2011a) News release: interior announces next steps in protection, recovery, and scientific management of wolves
US Fish and Wildlife Service (FWS) (2011b) Revised recovery plan for the northern spotted owl (Strix occidentalis caurina). US Department of Interior, Portland, Oregon, USA
US Fish and Wildlife Service (FWS) (2013) Joint venture program awards grants to promote fish and wildlife conservation in the Great Lakes. http://www.fws.gov/midwest/news/665.html. Accessed 25 Dec 2013
Acknowledgments
Josh Abbott, Rick Horan and the ECOSERVICES group at Arizona State University provided helpful comments on early drafts of this manuscript. KRS was partially supported by the Alfred P. Sloan foundation, the More Graduate Education at Mountain States Alliance (MGE@MSA), Alliances for Graduate Education and the Professoriate (AGEP) [National Science Foundation (NSF) Cooperative Agreement No. HRD-0450137], and the NSF Alliance for faculty diversity postdoctoral fellowship [NSF Grant DMS-0946431]. The regular disclaimers apply.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Salau, K.R., Fenichel, E.P. Bioeconomic analysis supports the endangered species act. J. Math. Biol. 71, 817–846 (2015). https://doi.org/10.1007/s00285-014-0840-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00285-014-0840-5
Keywords
- Endangered species act
- Public land
- Resource management
- Mathematical bioeconomics
- Dynamic optimization
- Allee effect