
Abstract
Social insect colonies exploit food sources that vary in their profitability and riskiness. One factor that affects both profitability and riskiness is the foraging distance: more distant resources are both more costly to exploit and expose individuals to greater predation or navigational risks. Temnothorax nylanderi scouts use tandem running to recruit nestmates to resources, such as food or nest sites. Tandem runs are often unsuccessful, leaving followers in potentially unknown or dangerous territory. Thus, as foraging distances increase, communication mistakes are likely to be more costly. We tested if leaders and followers adjust their tandem running behavior in response to increasing foraging distances. We asked whether the success rate, the probability to recruit, and the waiting time following a loss of contact depend on the foraging distances. We found that the success rate (75–86%) of tandem runs does not decrease with increasing foraging distance but rapidly increases with the leader’s experience, from 67% for the first tandem run to 94% for the fourth. Pairs progressed faster, and followers search longer for their partner after a loss of contact when visiting more distant food sources. The probability to perform a tandem run did not decrease with the foraging distance but increased with foraging experience. Our results indicate that ants might attempt to reduce exposure to risks by progressing faster when visiting more distant food sources. As ants become more experienced, they lead more and better tandem runs. These findings suggest that both leaders and followers respond to the potential dangers posed by exploiting faraway resources.
Significance statement
Foraging distance plays an important ecological role in animals as the foraging distance affects both energetic costs and predation risk. Ants have evolved several cooperative foraging strategies to exploit a food source as efficiently as possible, including a recruitment method called “tandem running.” Here, an informed leader guides a naïve follower to a valuable resource. We tested if tandem running behavior changes if food sources are more distant. Foraging distance indeed had an impact as leaders walked faster and followers searched for longer after a contact loss when food sources were more distant.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Social insects have evolved various forms of communication that allow workers to share information with their nestmates about valuable resources, such as food or a new nest site. This allows an individual that has discovered such a resource to recruit more nestmates to it. Ants, in particular, use a variety of recruitment strategies, including different forms of group recruitment and mass communication, i.e., the recruitment of large numbers of workers by means of pheromone trails (Traniello 1989b; Hölldobler and Wilson 1990; Detrain and Deneubourg 2008; Lanan 2014; Czaczkes et al. 2015). The benefit of a recruitment strategy depends on colony size: many species with larger colonies lay pheromone trails, whereas species with smaller colonies often use group recruitment or a recruitment strategy called “tandem running” (Beckers et al. 1989; Planqué et al. 2010). One explanation is that a relatively large number of workers are required to establish and maintain pheromone trails due to the volatility of trail pheromones (Beckers et al. 1989; Beekman et al. 2001).
Tandem running is common in species with very small colonies (Beckers et al. 1989) and is based on tactile interactions between an informed leader and a usually naïve follower who tries to stay in contact with the leader (Fig. 1) (Hingston 1929; Hölldobler et al. 1974; Möglich et al. 1974; Franks and Richardson 2006; Franklin 2014). Chemical signals may often play an important role, both when initiating a tandem run and to help followers maintain contact with the leader (Möglich et al. 1974; Hölldobler and Traniello 1980; Basari et al. 2014; Stuttard et al. 2016). If contact is lost, leaders wait for followers, while followers search for leaders in order to re-establish contact (Hingston 1929, Franks and Richardson 2006; Richardson et al. 2007; Franks et al. 2010).

a A tandem run of two Temnothorax nylanderi workers (photo by C. Grüter). b Marked workers collecting 1 M sucrose solution (photo by S. Glaser)
While tandem recruitment is likely to be beneficial for colonies because it accelerates the exploitation of good food sources (Shaffer et al. 2013) or the migration to high-quality nest sites (Franklin 2014), tandem running also has costs. First, tandem pairs often have a greatly reduced walking speed compared to ants traveling alone (Franks and Richardson 2006; Schultheiss et al. 2015; Kaur et al. 2017). Second, even if leaders know the location of a resource, tandem runs are often unsuccessful (Pratt 2008; Schultheiss et al. 2015; but see Kaur et al. 2017). For example, Wilson (1959) observed tandem runs in Cardiocondyla venustula in the wild and found that 50% of the tandem runs broke up and only 31% resulted in the discovery of a food source. Breakups are not necessarily unsuccessful as lost followers occasionally find the resource on their own (Pratt 2008; Franks et al. 2010; Shaffer et al. 2013; Schultheiss et al. 2015).
Tandem recruitment is modulated by the value of the resource (Mallon et al. 2001; Shaffer et al. 2013). For example, Temnothorax rugatulus colonies perform significantly more tandem runs when offered a more concentrated sucrose solution (Shaffer et al. 2013). A key factor affecting the value of a food source is the distance to it because more distant resources affect the payoff gained from exploiting a resource, e.g., by affecting time, energy, or predation costs (Traniello 1989a). As a result, honeybees and several ant species recruit with lower intensity when foraging at more distant food sources (von Frisch 1967; Taylor 1977; Fewell et al. 1992; Devigne and Detrain 2006) and foragers are less likely to return to more distant foraging sites (Al Toufailia et al. 2013b). Interestingly, distance does not seem to have the same effect in tandem running: Temnothorax albipennis and Temnothorax curvispinosus colonies performed more tandem runs after discovering a more distant nest site (Pratt 2008; O’Shea-Wheller et al. 2016). Colonies might perform fewer tandem runs to nearby nest sites because these are easy to discover by independent search. As a result, the threshold to switch to social carrying is reached earlier (Pratt 2008). In T. albipennis, on the other hand, per capita recruitment to more distant nest sites was higher, possibly because colonies can reduce the time of exposure to external risks by recruiting with higher intensity (O’Shea-Wheller et al. 2016). However, it remains unclear how ants might adjust their recruitment intensity to increasing distances in a foraging context where energy and time costs might be valued differently than during emergency colony emigration.
Increasing foraging distances also increase the risks associated with foraging (Traniello 1989a): ants traveling to more distant resources are more likely to get lost, and they experience an increased exposure to predators and competitors (O’Shea-Wheller et al. 2016). In T. curvispinosus, tandem runs to a nest site at a 65 cm distance had a 70% chance of breaking up, whereas only 43% of all tandem runs broke up when traveling to a nest site at 11 cm (Pratt 2008). If getting lost is indeed costly, an increasing risk for followers to get lost could either select for a lower rate of tandem running to more distant food sources or, alternatively, followers and leaders might adjust their behavior when traveling to more distant food sources in order to keep the breakup rate or predation risk low.
Here, we studied these two possibilities by offering Temnothorax nylanderi colonies food sources at different distances. In particular, we tested if the foraging distance affects the likelihood, success rate, and progress rate of tandem runs. If breakups occurred, we investigated whether the time that leaders and followers spend waiting and searching for their partners depended on the foraging distance. Another factor that might affect tandem running is the experience of the involved ants, e.g., the navigational knowledge of an ant or the experience with leading tandem runs. Old and experienced T. albipennis workers were both more likely and more accurate tandem leaders during colony emigrations (Franklin et al. 2012). Therefore, we also tested whether tandem run efficiency and probability increase with experience.
Material and methods
Study site and study species
Fifteen Temnothorax nylanderi colonies were collected from acorns and decaying branches in the Lenneberg forest near Mainz in Germany in 2015. In the laboratory, colonies were kept in nests that consisted of two microscope slides (50 mm × 10 mm × 3 mm) and, between the two slides, a Plexiglas slide containing an oval cavity that provided a living space and an opening that functioned as a nest entrance. The nest was placed in a slightly larger box (100 mm × 100 mm × 30 mm) with paraffin oil-coated walls to prevent ants from escaping. The colonies were kept in a climate chamber at 22 °C with a 12:12-h light/dark cycle. Colonies were fed twice a week with honey and a cricket and were provided with an ad libitum water source. The mean colony size (adult workers) was 130.9 ± 67.2 (± StDev), and all colonies had brood and a reproductive queen.
Experimental setup and procedure
All experiments were conducted in the same climate chamber to ensure constant climatic conditions. Before each experimental trial, colonies were starved for 10 days to guarantee that ants were motivated to forage. On day 8 of the starvation period, the nests containing the colonies were placed in a foraging arena (30 cm × 23 cm × 6 cm) so they could get accustomed to the foraging environment. After each trial, we cleaned the floor with ethanol to remove potential pheromone traces and foot prints. The walls of the arenas were also covered with Fluon to prevent ants from escaping. Each colony was tested three times with a 1 M sucrose solution, placed either at 7, 14, or 28 cm from the nest. Most foraging in this small ant occurs less than 0.5 m from the nest (Heinze et al. 1996). The order of the tested distance was randomized, and nests always occupied the same location on one side of the rectangular foraging arena.
On a test day, colonies were given access to a droplet of a sucrose solution at one of the three foraging distances. As soon as the first scout discovered the food source, arenas were video recorded for 90 min (Panasonic HC-V130). When foragers reached the food source for the first time, either alone or in a tandem pair, they were marked individually with a color dot (POSCA; Mitsubishi Pencil Co., UK) on their abdomen (Fig. 1b). We tried to mark four scouts (i.e., ants that found the food on their own) and four recruits (i.e., ants that were followers in a tandem run), but this was not always possible. Eight different colors were used to be able to individually identify eight focal foragers per trial. After each trial, colonies were fed for 1 day before being starved again for 10 days. Thus, after 11 days, colonies were tested again in a different distance setup.
Data collection
Different types of data were analyzed from the video recordings. For each visit of a marked ant, we noted whether she visited the food source alone, as a leader or as a follower of a tandem run. We recorded whether tandem runs were successful: a tandem was considered successful (i) if the pair reached the food source together, (ii) if a follower was guided to within 1 cm from the food source, or (iii) if the follower reached the food source less than 1 min after a contact loss. When a tandem run was unsuccessful, we determined whether the leader or the follower was more likely to have caused the breakup. Therefore, we measured how long leaders waited and followers searched in the area of the breakup: leaders typically stood still or walked slowly a few millimeters in the area where they lost contact. When ants started to walk away from the breakup point at normal speed, we considered this as an ant giving up trying to re-establish contact. See Basari et al. (2014) for a more detailed description. The ant that stopped waiting or searching first was considered to be responsible for the breakup.
The rate of progress (cm/s) of the tandem pairs was determined using the object detection and tracking software AnTracks (www.antracks.org). We divided the total length of the trajectories (total walked distance) of the leader (example trajectory shown in Fig. S1) by the duration of the tandem run. The straightness of the trajectory was calculated by dividing the total walked distance by the food source distance. Since tandem leaders were occasionally followed by more than one ant, we also noted the number of followers at the beginning and at the end for successful tandem runs.
Statistical analysis
All statistical tests were done in R 3.1.2 (Team 2016). We used linear mixed-effect (LME) models for normally distributed response variables and generalized linear mixed-effect models (GLMMs) for response variables with a binomial or Poisson distribution (Zuur et al. 2009). The variable “rate of progress” was transformed using a log transformation and then analyzed with a LME model. The variable “straightness” was transformed using the Box Cox transformation (Crawley 2007) to achieve normality. Colony ID and ant ID were used as hierarchically nested random effects to control for the non-independence of data points from the same colony and the same ant. We explored the role of two fixed effects, foraging distance and foraging experience. The effect of experience was tested either as the number of visits to the food source or as the number of performed tandem runs. We tested the effects of the fixed effects on the success rate, the probability of tandem runs, the rate of progress, and the straightness. Chi-square tests were performed to test who caused the breakups.
Results
Success rate
We marked 81 ants that performed 198 tandem runs. Overall, 160 (80.8%) tandem runs were successful. There was no difference between the three treatments in the success rate of tandem runs (Fig. 2a) (GLMM: χ2 = 0.32, df = 2, p = 0.85). We then explored whether the success rate of tandem runs depended on the foraging experience measured either as the number of foraging trips to the food source or as the number of tandem runs performed by an individual ant. Most ants (98.5%) performed fewer than eight visits. Therefore, we focused on the first seven visits. The success rate increased significantly (from 67% for the second to 93% for the seventh visit) with an increasing number of visits (GLMM: slope = 0.4595, standard error (SE) = 0.1806, χ2 = 8.95, df = 1, p = 0.0028). There was no interaction between the number of visits and distance (GLMM: χ2 = 0.59, df = 2, p = 0.74).

Success rate depending on the distance and number of tandem run. a The distance had no influence on the success rate (the number in column matches the amount of tandems in the treatment). b The number of tandem influenced the success rate positively (the number in column matches the amount of ants who performed a tandem)
We also used the number of tandem runs as a proxy for tandem running experience to explore whether this is linked to the success rate. The success rate increased significantly (from 67% for the first to 94% for the fourth tandem run) with an increasing number of tandem runs (Fig. 2b) (GLMM: slope = 1.046, SE = 0.2892, χ2 = 18.23, df = 1, p < 0.001; interaction: no. of tandem runs × distance: GLMM: χ2 = 2.74, df = 2, p = 0.25).
Probability to perform a tandem run
Overall, we recorded 1110 visits to a food source by 299 marked ants. We tested if the probability to perform a tandem run depended on the foraging distance and the foraging experience. There was a marginally non-significant tendency that distance may influence the probability to perform a tandem run (GLMM: distance: χ2 = 5.9855, df = 2, p = 0.0502). Thus, we did pairwise comparisons for the three distances. The probability to perform a tandem run was significantly lower when food was at 7 cm compared to 14 cm (GLMM: 7 vs. 14 cm: slope = 0.5065, SE = 0.2080, z = 2.648, p = 0.00809; 7 vs. 28 cm: slope = 0.3031, SE = 0.2337, z = 0.953, p = 0.34; 14 vs. 28 cm: slope = 0.2034, SE = 0.2250, z = − 1.469, p = 0.14), but the other comparisons were not significant (Fig. 3a). There was a significant increase in the probability to perform a tandem run with an increasing number of visits for all distances (Fig. 3b) (GLMM: slope = 0.4147, SE = 0.0501, χ2 = 74.4, df = 1, p < 0.001; interaction: visit × distance: χ2 = 5.1, df = 2, p = 0.078).

Probability to perform a tandem run. a The probability of a tandem depending on the distance (the number in column matches the amount of ants that visited the food source). b The probability to perform a tandem increased with visits (the number above column matches the amount of ants that started a tandem at a certain visit). Different letters indicate significant differences
Breakups and waiting time
Because 19.2% of all tandems were unsuccessful (tandems of marked and unmarked ants), we explored who might have caused the breakups (Fig. 4a). Therefore, we evaluated who first left the area of contact loss. In ~ 70% (52 of 73) of the breakups, the leader left the area of the breakup before the follower (chi-square test: χ2 = 27.7, df = 1, p < 0.001). In accordance with this, the waiting time of leaders was significantly shorter than the searching time of the follower and depended on the distance (GLMM: distance: χ2 = 63.2, df = 4, p < 0.001; 7 vs. 14: slope = 0.7450, SE = 0.1876; 7 vs. 28: slope = 1.027, SE = 0.1992; 14 vs. 28: slope = 0.2824, SE = 0.0846; leader/follower: slope = 1.986, SE = 0.0482, χ2 = 2657.7, df = 3, p < 0.001; interaction: χ2 = 28.23, df = 2, p < 0.001; 7 vs. 14: slope = 0.7405, SE = 0.1252; 7 vs. 28: slope = 0.7982, SE = 0.1368; 14 vs. 28: slope = 0.0577, SE = 0.1127). A more detailed examination of the distance effect revealed that the waiting time of the leader was shorter for 28 cm than for 14 cm (Fig. 4b) (GLMM: 7 vs. 14 cm: slope = 1.902, SE = 1.076, z = 1.8, p = 0.077; 7 vs. 28 cm: slope = 0.6792, SE = 1.076, z = − 0.63, p = 0.53; 14 vs. 28 cm: slope = 1.223, SE = 0.1480, z = 8.3, p < 0.001). The searching times of the followers increased from 7 to 28 cm food distance, with 14 cm showing an intermediate searching time (Fig. 4c) (GLMM: 7 vs. 14 cm: slope = 0.9499, SE = 0.2116, z = 4.49, p < 0.001; 7 vs. 28 cm: slope = 0.7365, SE = 0.2310, z = 3.19, p = 0.0014; 14 vs. 28 cm: slope = 0.2134, SE = 0.1125, z = − 1.9, p = 0.058).

Breakups. a Who caused the breakup. Both: leader and follower were both responsible for the breakup. Nest: tandem run ended back in the nest. b Waiting time of the leader after a breakup for the three distances. c Searching time of the follower after a breakup. c Boxplots show medians, quartiles, and fifth and 95th percentiles. Different letters indicate significant differences
Tandem duration and rate of progress
We tested if the time tandem pairs need to reach the food source depended on the experience measured as the number of tandem runs a leader had performed. We did this for each distance separately, because tandem durations differed greatly between distances. For the tandem runs to the food source at 7 cm, the ants needed less time with an increasing number of tandem runs performed (GLMM: 7 cm: slope = 0.2866, SE = 0.0286, z = − 10.03, p < 0.001). Interestingly, the opposite was found for tandem runs to either 14 or 28 cm as tandem runs of more experienced ants lasted longer (GLMM: 14 cm: slope = 0.1542, SE = 0.0107, z = − 14.4, p < 0.001; 28 cm: slope = 0.0663, SE = 0.0100 z = 6.6, p < 0.001).
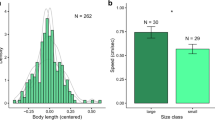
Ants progressed significantly faster if the distance to the food source was more than 7 cm (Fig. 5a) (LME model: 7 vs. 14 cm: slope = 0.0945, SE = 0.0318, df = 101, t = 2.97, p = 0.0037; 7 vs. 28 cm: slope = 0.1316, SE = 0.0345, df = 101, t = 3.81, p < 0.001; 14 vs. 28 cm: slope = 0.0371, SE = 0.0345, df = 101, t = 1.07, p = 0.29). However, the number of the tandem runs a leader performed had no influence on the rate of progress (LME model: df = 89, t = − 0.27, p = 0.79; interaction: distance × number tandem: likelihood ratio test (LRT) = 0.79, p = 0.67). Whether a tandem run was successful or not had no influence on the rate of progress of the tandem runs (LME model: df = 135, t = 0.02, p = 0.98; interaction: distance × success: LRT = 3.09, p = 0.21).

Rate of progress and straightness for the three foraging distances. a The rate of progress depending on the food distance. b The straightness of the tandem runs for the three food distances (straightness = walked distance / food distance). Boxplots show medians, quartiles, and fifth and 95th percentiles. Different letters indicate significant differences
Tandem trajectory
On their way to the food source, tandem runners rarely walk in a straight line (see Fig. S1 for an example of a trajectory). We compared the straightness for the different foraging distances by dividing the walked distance through the foraging distance (Fig. 5b). We found that tandem runs were more straight when recruiting to the 7-cm feeder than when recruiting to the 28-cm feeder (GLMM: 7 vs. 14 cm: slope = 0.0533, SE = 0.0438, df = 70, t = − 1.2, p = 0.23; 7 vs. 28 cm: slope = 0.1260, SE = 0.0472, df = 70, t = − 2.67, p = 0.0095; 14 vs. 28 cm: slope = 0.0727, SE = 0.0471, df = 70, t = − 1.54, p = 0.13). The number of the tandem runs performed had no influence on the straightness (LME model: df = 70, t = 1.121, p = 0.2661; distance × number tandem: LRT = 2.292, p = 0.32).
Number of followers and foragers at food sources
We noticed that tandem leaders (of individually marked and unmarked ants) frequently had more than one follower (32.3% at beginning, 10.1% at the end of tandem run). In such tandem runs, some followers got lost, whereas in other instances, ants joined a tandem run that was already under way. As shown in Fig. 6, some tandem runs started and ended with up to five followers.

Number of followers at the a beginning and b end of a tandem run
Discussion
We found no effect of food distance on the success rate of tandem runs. The success rate of tandem runs to a nearby food source (7 cm) was almost identical to the success rate to a food source four times further away (28 cm; 84 vs. 86%). This was unexpected given that tandem runs to more distant food sources last longer and probably provide more navigational challenges, e.g., because more visual information needs to be stored. These challenges could explain why tandem runs towards more distant food sources were less straight. Our results also differ from house-hunting Temnothorax albipennis where tandem runs to more distant nest sites broke up more often (Pratt 2008). It is probable that testing greater foraging distances would have revealed a distance effect, but the foraging distances we used in our study are similar to natural foraging distances in T. nylanderi (Heinze et al. 1996). Alternatively, tandem running ants might adjust their behavior when traveling further in order to maintain the error rate and, therefore, the risk of exposing lost followers to dangers further from the colony. In accordance with this, we found that followers searched for 82% longer after losing contact with the leader when the food source was 28 cm compared to 7 cm (Fig. 4c). There was no consistent effect of waiting time of the leaders in a particular direction (Fig. 4b), which is an interesting difference compared to T. albipennis, where leaders waited for longer if tandem runs have proceeded for longer (Richardson et al. 2007). However, a similar effect was found in honeybees where foragers observe waggle dances longer if dances indicate more distant food sources and have a large angular noise (Al Toufailia et al. 2013a). When breakups did occur in our study, the leaders appeared to be responsible in 71% of all cases. Leaders often continued to travel towards the food source without waiting for their partner after losing contact, thereby leaving the searching follower behind.
After discovering the food source, foragers performed a tandem run in ~ 10% of all first returns to the food source. We found no effect of the foraging distance on the probability to perform a tandem run when comparing our short (7 cm) and our long (28 cm) treatment, but an increase with experience (see below). In contrast, a previous study found that tandem runs to new nest sites were more likely when nest sites were more distant, possibly because emigrations over greater distances are more dangerous and, therefore, more tandem runs would be expected if they accelerate the migration process (O’Shea-Wheller et al. 2016). Indeed, colony migrations might pose more risks because the whole colony, including brood and the queen, is exposed to threats. Thus, there might be a higher payoff for being as fast as possible, compared to foraging. Many other social insects reduce the recruitment intensity as food sources are more distant, most likely because distant food sources are more costly to exploit (von Frisch 1967; Taylor 1977; Roces 1990; Fewell et al. 1992; Devigne and Detrain 2006). These opposing pressures—increasing recruitment due to risk and difficulty of finding a resource vs. decreasing recruitment due to a decreasing profitability—might cancel each other out and explain why we found no consistent effect of foraging distance in our study. An increased exposure to risks could also help to explain the interesting finding that pairs progressed faster to more distant food sources (Fig. 5a). By progressing faster, tandem pairs might attempt to reduce exposure to predators.
Experience had a nearly immediate and positive effect on the success rate of tandem runs. While only 67% of all first tandem runs were successful, more than 90% were successful if the leader performed two tandem runs before (Fig. 2). It is possible that leaders improve their orientation abilities as they gain more experience navigating in the foraging box or that their ability to lead tandem runs increases with each tandem run. Also, the probability to perform a tandem run increased with increasing experience, from ~ 10 to > 30% after three visits to the food source (Fig. 3). Thus, tandem runs become more likely as tandem leaders become more successful, which is likely to reduce the risk of breakups. Franklin et al. (2012) found that experienced ants were more likely to participate in tandem runs in T. albipennis. Old experienced leaders led slower and more direct tandem runs than young inexperienced leaders, suggesting an effect of age or experience (or both) on the characteristics of tandem runs in T. albipennis (Franklin et al. 2012). Interestingly, experience had no effect on the rate of progress or the straightness of tandem runs in our study. Thus, how experience improves the success rate of tandem runs requires further examination. One possibility is that experience affects the behavior of ants during brief contact losses.
Usually, followers in a tandem run are naïve (Franks and Richardson 2006; Richardson et al. 2007; but see Schultheiss et al. 2015). In our experiments, it happened occasionally that followers (11 of 132 marked tandem followers in all trials) had already participated in a tandem run before. Possibly, some ants did not acquire sufficient navigational information and, therefore, followed another tandem run or foragers might have been dissatisfied with the food source and decided to follow another tandem run, not knowing that they will be led to the same food source again. Thirty-four percent of all tandem runs started with more than one follower (from 2 to 5; Fig. 6), and 11% of all successful tandem runs reached the food source with more than one follower. How the cohesion between multiple followers is maintained and, in particular, whether contact pheromones are important for tandem cohesion in T. nylanderi remain to be investigated. In other species, pheromones help tandem pairs to maintain contact (Möglich et al. 1974; Hölldobler and Engel 1978; Traniello and Hölldobler 1984; Basari et al. 2014). Our results that leaders can be followed by several ants support the statement that the evolution of group recruitment from tandem running represents a relatively small step (Beckers et al. 1989).
References
Al Toufailia H, Couvillon MJ, Ratnieks FLW, Grüter C (2013a) Honey bee waggle dance communication: signal meaning and signal noise affect dance follower behaviour. Behav Ecol Sociobiol 67(4):549–556. https://doi.org/10.1007/s00265-012-1474-5
Al Toufailia H, Grüter C, Ratnieks FLW (2013b) Persistence to unrewarding feeding locations by honeybee foragers (Apis mellifera): the effects of experience, resource profitability and season. Ethology 119(12):1096–1106. https://doi.org/10.1111/eth.12170
Basari N, Laird-Hopkins BC, Sendova-Franks AB, Franks NR (2014) Trail laying during tandem-running recruitment in the ant Temnothorax albipennis. Naturwissenschaften 101(7):549–556. https://doi.org/10.1007/s00114-014-1191-1
Beckers R, Goss S, Deneubourg JL, Pasteels JM (1989) Colony size, communication and ant foraging strategy. Psyche A J Entomol 96(3-4):239–256. https://doi.org/10.1155/1989/94279
Beekman M, Sumpter DJ, Ratnieks FL (2001) Phase transition between disordered and ordered foraging in Pharaoh’s ants. Proc Natl Acad Sci U S A 98(17):9703–9706. https://doi.org/10.1073/pnas.161285298
Crawley MJ (2007) The R book. John Wiley & Sons Ltd, West Sussex. https://doi.org/10.1002/9780470515075
Czaczkes TJ, Grüter C, Ratnieks FLW (2015) Trail pheromones: an integrative view of their role in social insect colony organization. Annu Rev Entomol 60(1):581–599. https://doi.org/10.1146/annurev-ento-010814-020627
Detrain C, Deneubourg J-L (2008) Collective decision-making and foraging patterns in ants and honeybees. Adv In Insect Phys 35:123–173. https://doi.org/10.1016/S0065-2806(08)00002-7
Devigne C, Detrain C (2006) How does food distance influence foraging in the ant Lasius niger: the importance of home-range marking. Insect Soc 53(1):46–55. https://doi.org/10.1007/s00040-005-0834-9
Fewell JH, Harrison JF, Stiller TM, Breed MD (1992) Distance effects on resource profitability and recruitment in the giant tropical ant, Paraponera clavata. Oecologia 92(4):542–547. https://doi.org/10.1007/BF00317846
Franklin EL (2014) The journey of tandem running: the twists, turns and what we have learned. Insect Soc 61(1):1–8. https://doi.org/10.1007/s00040-013-0325-3
Franklin EL, Robinson EJH, Marshall JAR et al (2012) Do ants need to be old and experienced to teach? J Exp Biol 215(8):1287–1292. https://doi.org/10.1242/jeb.064618
Franks NR, Richardson T (2006) Teaching in tandem-running ants. Nature 439(7073):153. https://doi.org/10.1038/439153a
Franks NR, Richardson TO, Keir S et al (2010) Ant search strategies after interrupted tandem runs. J Exp Biol 213(6):1697–1954. https://doi.org/10.1242/jeb.087296
Heinze J, Foitzik S, Hippert A, Hölldobler B (1996) Apparent dear-enemy phenomenon and environment-based recognition cues in the ant Leptothorax nylanderi. Ethology 102(3):510–522. https://doi.org/10.1111/j.1439-0310.1996.tb01143.x
Hingston R (1929) Instinct and intelligence. Macmillan, New York
Hölldobler B, Engel H (1978) Tergal and sternal glands in ants. Psyche (Stuttg) 85(4):285–330. https://doi.org/10.1155/1978/23867
Hölldobler B, Möglich M, Maschwitz U (1974) Communication by tandem running in the ant Camponotus sericeus. J Comp Physiol 90(2):105–127. https://doi.org/10.1007/BF00694481
Hölldobler B, Traniello J (1980) Tandem running pheromone in ponerine ants. Naturwissenschaften 67(7):360. https://doi.org/10.1007/BF01106596
Hölldobler B, Wilson EO (1990) The ants. Harvard University Press, Springer, Berlin. https://doi.org/10.1007/978-3-662-10306-7
Kaur R, Joseph J, Anoop K, Sumana A (2017) Characterization of recruitment through tandem running in an Indian queenless ant Diacamma indicum. R Soc Open Sci 4(1):160476. https://doi.org/10.1098/rsos.160476
Lanan MC (2014) Spatiotemporal resource distribution and foraging strategies of ants (Hymenoptera: Formicidae). Myrmecological News 20:53–70. https://doi.org/10.1016/j.biotechadv.2011.08.021.Secreted
Mallon EB, Pratt SC, Franks NR (2001) Individual and collective decision-making during nest site selection by the ant Leptothorax albipennis. Behav Ecol Sociobiol 50(4):352–359. https://doi.org/10.1007/s002650100377
Möglich M, Maschwitz U, Hölldobler B (1974) Tandem calling: a new kind of signal in ant communication. Science 186(4168):1046–1047. https://doi.org/10.1126/science.186.4168.1046
O’Shea-Wheller TA, Sendova-Franks AB, Franks NR (2016) Migration control: a distance compensation strategy in ants. Sci Nat 103(7-8):66. https://doi.org/10.1007/s00114-016-1386-8
Planqué R, van den Berg JB, Franks NR (2010) Recruitment strategies and colony size in ants. PLoS One 5(8):1–8. https://doi.org/10.1371/journal.pone.0011664
Pratt SC (2008) Efficiency and regulation of recruitment during colony emigration by the ant Temnothorax curvispinosus. Behav Ecol Sociobiol 62(8):1369–1376. https://doi.org/10.1007/s00265-008-0565-9
Richardson TO, Sleeman PA, McNamara JM et al (2007) Teaching with evaluation in ants. Curr Biol 17(17):1520–1526. https://doi.org/10.1016/j.cub.2007.08.032
Roces F (1990) Leaf-cutting ants cut fragment sizes in relation to the distance from the nest. Anim Behav 40(6):1181–1183. https://doi.org/10.1016/S0003-3472(05)80185-X
Schultheiss P, Raderschall CA, Narendra A (2015) Follower ants in a tandem pair are not always naïve. Sci Rep 5(1):10747. https://doi.org/10.1038/srep10747
Shaffer Z, Sasaki T, Pratt SC (2013) Linear recruitment leads to allocation and flexibility in collective foraging by ants. Anim Behav 86(5):967–975. https://doi.org/10.1016/j.anbehav.2013.08.014
Stuttard JP, Gottlieb D, Franks NR (2016) Ants incommunicado: collective decision-making over new nest sites by ants with reduced communication. Behav Ecol Sociobiol 70(1):145–155. https://doi.org/10.1007/s00265-015-2033-7
Taylor F (1977) Foraging behavior of ants: experiments with two species of myrmecine ants. Behav Ecol Sociobiol 2(2):147–167. https://doi.org/10.1007/BF00361899
Traniello JFA (1989a) Foraging strategies of ants. Annu Rev Entomol 34(1):191–210. https://doi.org/10.1146/annurev.ento.34.1.191
Traniello JFA (1989b) Chemical trail systems, orientation, and territorial interactions in the ant Lasius neoniger. J Insect Behav 2(3):339–354. https://doi.org/10.1007/BF01068060
Traniello JFA, Hölldobler B (1984) Chemical communication during tandem running in Pachyconcyla obscuricornis (Hymenoptera: Formicidae). J Chem Ecol 10(5):783–794. https://doi.org/10.1007/BF00988543
von Frisch K (1967) The dance language and orientation of bees. Harvard University Press, Cambridge
Wilson EO (1959) Communication by tandem running in the ant genus Cardiocondyla. Psyche: A Journal of Entomology 66(3):29–34. https://doi.org/10.1155/1959/29093
Zuur A, Ieno E, Walker N et al (2009) Mixed effects models and extensions in ecology with R. Springer, New York. https://doi.org/10.1007/978-0-387-87458-6
Acknowledgements
We thank Stephen Pratt and an anonymous referee for their valuable and helpful comments on the manuscript. This study was supported by the Deutsche Forschungsgemeinschaft (DFG) (GR 4986/1-1).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by William Hughes
Electronic supplementary material
Fig. S1
(DOCX 554 kb)
Rights and permissions
About this article

Cite this article
Glaser, S., Grüter, C. Ants (Temnothorax nylanderi) adjust tandem running when food source distance exposes them to greater risks. Behav Ecol Sociobiol 72, 40 (2018). https://doi.org/10.1007/s00265-018-2453-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00265-018-2453-2