
Abstract
Over the last decades, there has been growing interest among behavioral ecologists in exploring animal personalities. However, while the foraging behavior of active foragers has been extensively studied, only little is known about that of sit-and-wait predators within the personality framework. We investigated the existence of repeatability and personality in pit-building antlion larvae in the context of foraging (pit construction) and habitat selection (relocation distance and direction) over time and under three environmental contexts: thermal conditions, sand depth, and soil type. Over time, repeatability was much stronger for relocation distance than for movement directionality. Additionally, we observed positive correlations across the two levels of sand depth and soil type but not between thermal conditions. Change in substrate type may induce faster decision-making in these sand-dwelling insects or could be perceived by such insects as a more drastic alteration in their habitat. We suggest that different individuals indeed possess distinct personalities. We also suggest that repeatability should be measured at two levels: the amount of energy expenditure (distances and pit construction) and the pattern of energy expenditure (directionality). Finally, our study illustrates how differing environmental conditions can result in differing levels of plasticity, while largely preserving individual personalities.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Over the last decades, there has been a growing interest in examining repeatable inter-individual differences in behavior, referred to as “animal personalities” (Gosling 2001; Sih et al. 2004a; Bell 2007; Réale et al. 2007; Dingemanse and Wolf 2010; Stamps and Groothuis 2010). Multi-trait correlations have attracted the attention of numerous research endeavors due to their potential to have evolved as a “suite” or “package” of correlated traits rather than to have evolved independently, termed “behavioral syndrome” (Price and Langen 1992; Sih et al. 2004a). Such joint evolution could result in constraints on adaptation of any of these traits independently (e.g., Bell 2005; Sih et al. 2012; Wolf and Weissing 2012) and might also explain how behavioral variation is maintained in the population, rather than eroding through natural selection (e.g., Dingemanse and Wolf 2010; Pruitt et al. 2011a; Pruitt and Riechert 2012).
An important component or pre-assumption of animal personality is that these “suites” of behavioral traits are repeatable over a period of (at least some) time and under different environmental contexts (Wilson 1998; Dingemanse et al. 2002; Dall et al. 2004; Sih et al. 2004b; Biro and Stamps 2010). Otherwise, snapshots of random multi-trait correlations might be mistakenly interpreted as animal personality (Sinn et al. 2010). Evaluating the persistence of behavioral traits and their intrinsic and extrinsic drivers is also highly important for our understanding of their ecological and evolutionary consequences (Bell et al. 2009; Archard and Braithwaite 2010). In other words, a highly persistent or repeatable behavioral trait provides strong ecological predictive power. In their meta-analysis, Bell et al. (2009) explored factors that might explain the extent to which behavioral traits are repeatable. Unsurprisingly, behavior was more repeatable over short time scales than over longer ones, probably owing to changes in individual physiological state and/or in gene expression during ontogeny. With regard to population genetics, repeatability should allow us to evaluate the proportion of phenotypic variation explained by inter-individual differences (Falconer and Mackay 1996).
A main feature of animal personality is that even if individual behavior changes along varying environmental contexts, the rank order of behavioral differences among individuals should remain the same (Sih et al. 2004b; Dingemanse and Wolf 2010). For instance, individual great tits that were more aggressive to conspecific competitors maintained within-population high rank order also in terms of anti-predator aggression (Hollander et al. 2008). A similar pattern may also exist over time: while individuals may become more aggressive with age, their aggression rank order within each age class often remains the same (e.g., Roberts and DelVecchio 2000). Animal personality can sometimes result in less than optimal behavioral plasticity under varying environmental contexts (e.g., Sih et al. 2003; Duckworth 2006). In other words, due to trait correlations and spill-over effect, organisms may fail to show the full behavioral plasticity that might otherwise help them perform better under changing environmental conditions (Sih et al. 2004a, b).
While studies of animal personality on active foragers are common (Bell et al. 2009), the personality of trap-building predators has been little studied, especially with regard to habitat selection and foraging behavior (and trap construction in particular). Furthermore, although invertebrates comprise 98 % of all animal species and have unique life histories and behavioral features, they are under-represented in personality studies (Kralj-Fišer and Schuett 2014). Here, we examined for the first time the repeatability and personalities of pit-building antlion larvae in the context of foraging behavior and activity during habitat selection over time and under three environmental contexts (thermal conditions, sand depth, and soil type). Each context had two levels, one favorable to the antlions and the other unfavorable.
Pit-building antlion larvae comprise a group of trap-building predators that select an appropriate site at which to construct pits that serve as traps, rather than actively searching for prey (Eltz 1997; Ruxton and Hansell 2009; Scharf et al. 2011). Both antlion and spider species construct traps for hunting prey. Any similarity detected between these two taxa could be explained, in light of the strong similarity in foraging behavior, as a clear case of convergent evolution (Scharf et al. 2011). Due to their limited mobility, pit-building antlion larvae are strongly influenced by microclimate conditions, such as rain, soil moisture, soil temperature, soil depth, soil type and particle size (Marsh 1987; Gotelli 1993; Devetak et al. 2005; Devetak 2008). Notably, these abiotic factors affect their site selection, trap size and shape, and are major contributors to the antlion’s growth and development (Scharf and Ovadia 2006). For instance, a habitat choice experiment has shown that larvae of the pit-building antlion Cueta lineosa prefer to build their pits in fine-grained loess soil, where they also have a higher prey capture success, rather than in coarser-grained sand (Barkae et al. 2012). In addition, biotic factors, such as competition and predation threat, can also affect the habitat selection and foraging behavior of antlion larvae. For example, Loria et al. (2008) examined the activity of antlion larvae threatened by two predators in deep and in shallow sand. They suggested that shallow sand is perceived by the larvae as risky or unfavorable, leading to higher relocation activity, aimed at detecting safer habitats.
The aims of the present study were: (1) to explore individual repeatability over time and under three different environmental contexts: thermal conditions, sand depth, and soil type, each comprising favorable and unfavorable conditions; (2) to examine individual repeatability; and (3) to quantify the plastic responses to differing conditions for each environmental contexts. We focused on two common behaviors of the larvae: movement while relocating the pit and pit construction. These traits were selected because they are directly related to foraging behavior and habitat selection. Foraging and habitat selection behaviors are rarely referred to within a personality framework (in contrast to aggression, activity, boldness, etc.). Hence, our study responds to the recent call to widen the typical set of behaviors studied in a personality framework (Stahlschmidt et al. 2014). Moreover, by investigating larvae, we could control for reproductive activities (e.g., courting, mating, and ovipositioning), while exclusively focusing on foraging and habitat selection decisions (Scharf et al. 2010). Indeed, two reviews refer to pit construction and relocation as the most important (and highly flexible) behaviors of antlion larvae (Scharf and Ovadia 2006; Scharf et al. 2011).
Movement pattern is generally important, either to increase encounter events with prey or to avoid unfavorable habitats and encounters with predators (Dall et al. 2001; Nolet and Mooij 2002; Scharf et al. 2012b). This holds true also for sit-and-wait predators, which relocate when prey become scarce or following disturbance. For instance, movement direction is important in spiders: when exposed to a disturbance from a specific direction (right or left), spiders moved away from the direction of disturbance (Chmiel et al. 2000). We predict that directional movement should be preferred and highly repeatable, in that it allows the antlion to move as far as possible from its current location with less energetic cost than that exacted by random movement. Pit construction and relocation should be under high selection pressure in antlions. We thus predict both traits to be highly repeatable, at least under the same environmental conditions. Moreover, even when the environment changes, we expect the rank order of all behavioral traits to remain similar.
Methods
Study species and habitat of origin
We collected Myrmeleon hyalinus larvae (Neuroptera: Myrmeleontidae) from several tamarisk trees in Nahal Secher (N 31° 06′, E 34° 49′), a sandy area 15 km south of the city of Be’er-Sheva, Israel, and brought them to the laboratory. M. hyalinus is the most abundant pit-building antlion in Israel (Simon 1988). Antlions undergo a complete metamorphosis. The larval period comprises three instar stages lasting up to 1 year; next, the larvae enter a pupation period of about 1 month, following which weak-flying, short-lived adults emerge (Scharf et al. 2009a). The larval maximal length is ~10 mm, and it can attain a maximal body mass of ~0.06 g before pupating (Scharf et al. 2008a). The larvae are opportunistic predators that prefer to build their pits in shaded microhabitats beneath trees or bushes, while inhabiting an extensive range of sandy soils (Simon 1988).
Experimental design
Antlions (total sample size = 172) were fed once a week with a flour beetle larva (Tenebrio molitor) for four successive weeks, weighed using an analytical scale (accuracy of 0.1 mg; CP224S, Sartorius AG, Göttingen, Germany), and then kept for 3 days without food in small plastic cups (4.5 cm diameter, filled with ~3 cm of sand). This habituation period was used to standardize the hunger level of the antlions (Scharf et al. 2009b). Next, all larvae were photographed using a digital camera (Micropublisher 5.0, QImaging, Surrey, BC, Canada), connected to a Nikon stereoscope (SMZ 800, Nikon, Kawasaki, Japan). Using the program ImageJ (Abràmoff et al. 2004), we measured head width and mandible length, which by plotting one against the other, enabled us to select third-instar larvae (Scharf et al. 2008a; Alcalay et al. 2014). The third-instar stage was used in all experiments. The two focal behaviors were relocation activity (distance and directionality) and pit-building behavior (pit construction). The study comprised three parts, each focusing on a specific environmental context, all involving foraging and habitat selection behavior. Within each context, there were two levels, favorable and unfavorable.
(1) Thermal conditions: Antlions (N = 60) were tested under two different temperature and humidity conditions, 35 °C and 20 % relative humidity (vapor pressure, 7.94 g/m3) vs. 20 °C and 50 % relative humidity (vapor pressure, 8.67 g/m3). These two temperatures match the maximum average daily temperature in the hot dry summer (harsh conditions) and the average daily temperature year-round in the Negev desert (Goldreich 2003, p. 101) (hereafter referred to as harsh vs. benign conditions). (2) Sand depth: Antlions (N = 56) were tested in shallow vs. deep sand (sand depth of 0.5 and 3 cm). The easily penetrated upper layer of the soil, used by antlion larvae to construct their pits, can vary greatly in depth and stabilization (Danin 1978). Shallow sand is perceived by antlions as a more risky/stressful habitat because it constrains their ability to evade potential predators (Loria et al. 2008). (3) Soil type: Antlions (N = 56) were tested in sand vs. loess. In the Negev desert of Israel, sand-derived soils are surrounded and fragmented by loess-derived soils, forming a wide range of habitat mosaics (Evenari 1982, pp. 43–46). Furthermore, as predicted by the inverse texture hypothesis, in this region the former soils are much more productive than the latter ones (Noy-Meir 1973). This may explain why although M. hyalinus performs equally well in both sand- and loess-derived soils, i.e., a habitat generalist (Barkae et al. 2012), it exhibits a strong selectivity for sandy habitats (Barkae et al. 2012, 2014).
Antlions exposed to each environmental context were divided into two groups of similar mean and variance of initial body mass. Each group was exposed to both the favorable and unfavorable conditions of the environmental context. Specifically, after four observations, the experimental conditions were switched between groups (e.g., individuals experiencing first favorable conditions were switched to unfavorable conditions and vice versa). Switching conditions, with a total of eight observations per individual, four at each level, allowed us to pinpoint the effect of each level on the same individual. In order to control for hunger level, we fed all individuals with one prey item (a flour beetle larva) between the first and the second phases of each environmental context. Observations were performed in the morning, and each individual was placed within a separate 23.5 × 17 cm experimental container (Fig. 1a–c) for 6 h under dark condition (when antlions relocation is more common; Scharf et al. 2008b). These containers were photographed every 2 h using a digital camera (three measurements per observation). For the rest of the day, larvae were placed in a round plastic cup under room conditions and a day/night cycle ~12:12 h. Out of 4,104 photos, 18 were excluded from the analysis because the traces were unmeasurable, owing to over-relocation activity. During the experiments, 2 of the 172 individuals pupated and were thus excluded from further analyses.

Photos of the experimental containers under: a deep sand, b shallow sand (arrows indicate the sand depth), and c loess soil. d Drawing of the traits that were measured: relocation distance, turning angles, displacement, and pit construction
Statistical analysis
We used the software GetData Graph Digitizer (v. 2.25.032) to obtain coordinates in order to calculate relocation distances, i.e., track the sum length of the three measurements per day, and to mark whether each individual constructed a pit every day. A relatively low rate of pit construction (~50 % in average) was observed; we thus treated pit construction as a discrete variable by summing the events of pit construction (i.e., whether each individual constructed a pit every day; values between 0 to 4). In addition, we measured two traits of movement directionality (Fig. 1d), calculated per day: (1) displacement, delta of the first and last coordinates along the track length divided by the distance length. The outcome is a proportion, indicating whether the individual moved directionally (value close to 1) or nondirectionally (value close to 0). (2) Turning angle standard deviation (SD), we used a program written in MATLAB to obtain the angle of each turn while moving, in order to calculate the standard deviation of these angles. Directional movement is characterized by a lower variance of angles than more tortuous movement. Relocation distances and the traits of movement directionality were log transformed to correct for deviation from normality (skewed to the right). We then analyzed the data at two levels: (1) Between days: repeatability under the same context level, testing for relocation distances, displacement divided by the distance length (displacement-to-distance), and turning angle SD. (2) Within environmental context: we tested for behavioral repeatability between the two levels of the same environmental context regarding relocation distance and the two directionality traits (i.e., daily average per individual of four measurements at each level) and pit construction (values between 0 to 4). Repeatability between days and within environmental context was tested using Intraclass Correlation Coefficients (ICC; Hayes and Jenkins 1997). Similar results were obtained when using Pearson r correlations and Cronbach’s alpha (Burns 2008); we thus report the repeatability results only for the ICC. In order to examine behavioral plasticity in relocation distance between the two levels of each environmental context, we used separate repeated-measures ANOVAs. Since multiple observations of the same individuals are not independent on each other and because pit construction was not normally distributed (ranging between 0 and 4), we tested for plasticity in pit construction using the nonparametric Wilcoxon signed-rank test (equivalent of paired t test or repeated measures ANOVA). All statistical analyses were performed in SYSTAT v. 12 (SYSTAT Software), except for calculation of the ICC and its 95 % confidence intervals, which were done using the R (R Development Core Team, 2012) package “psy” developed by Bruno Falissard (http://cran.r-project.org/web/packages/psy/index.html).
Results
Repeatability over time
Repeatability between days was dependent on the trait measured: relocation distance, displacement-to-distance, and turning angle SD exhibited high, medium, and low levels of repeatability, respectively (Table 1).
Relocation distance
Relocation distances were highly repeatable between successive days under the favorable and unfavorable conditions of each of the three environmental contexts. However, the repeatability of relocation distances was higher in sand than in loess, while only little variation was observed in repeatability between levels in the other two environmental contexts (Table 1).
Displacement-to-distance
Repeatability was significant under both favorable and unfavorable conditions of all environmental contexts, except for loess. Repeatability was slightly higher under harsh than under benign thermal conditions, higher under shallow than under deep sand, and higher in sand than in loess (Table 1).
Turning angle SD
Turning angles generally demonstrated low repeatability, which was significant only in half of the cases. A somewhat higher repeatability was detected under both sand depths and in sand but not in loess (Table 1).
Repeatability within environmental context
Here, the main difference was linked to the environmental context, with the two levels of sand depth and sand type leading to more repeatable behavior than the two levels of thermal conditions (Fig. 2).

Repeatability (ICC) in relocation distance, pit construction, displacement-to-distance ratio, and turning angle SD within the three environmental contexts: thermal conditions (white), sand depth (light gray), and soil type (dark gray). Error bars represent 95 % confidence intervals
Repeatability between the two levels of thermal conditions was not significant with respect to all behavioral traits (relocation distance: ICC = 0.04; 95 % CI = (−0.14, 0.27); pit construction: ICC = 0.20; 95 % CI = (−0.06, 0.43); displacement-to-distance: ICC = 0.11; 95 % CI = (−0.11, 0.31); turning angle SD: ICC = 0.03; 95 % CI = (−0.31, 0.40)). By contrast, all behavioral traits except for turning angle SD were repeatable between the two sand depths (relocation distance: ICC = 0.33; 95 % CI = (0.13, 0.70); pit construction: ICC = 0.47; 95 % CI = (0.24, 0.68); displacement-to-distance: ICC = 0.43; 95 % CI = (0.25, 0.63); turning angle SD: ICC = 0.10; 95 % CI = (−0.01, 0.38)), and soil type (relocation distance: ICC = 0.26; 95 % CI = (0.04, 0.56); pit construction: ICC = 0.29; 95 % CI = (0.02, 0.52); displacement-to-distance: ICC = 0.32; 95 % CI = (0.14, 0.46); turning angle SD: ICC = 0.25; 95 % CI = (0.02, 0.50)). Note that turning angle SD was repeatable in the latter context of sand depth.
Behavioral plasticity
In addition to repeatability, we sought to examine the average behavioral responses under each context. The two indices of movement directionality showed low repeatability and hence were excluded from the analysis. The main differences were found between pit construction and relocation distances for varying sand depths and soil types, respectively.
Thermal conditions
We could not detect any differences in relocation distances (F 1, 59 = 1.93, P = 0.17; Fig. 3a) or in pit construction (Z = 1.30, n = 46, P = 0.19; Fig. 3b) between benign and harsh thermal conditions.

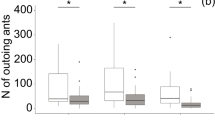
Average behavior (or between-level behavioral plasticity) of (a, c, e) relocation distance and (b, d, f) pit construction under three environmental contexts: a, b thermal conditions, c, d sand depth, and e, f soil type. Stars represent significance level using the following rules: 0.01 < *< 0.05, 0.001 < **< 0.01, and ***<0.001. Error bars represent SE for relocation distance and min-max for pit construction. Median pit construction in shallow sand (d) overlaps with the upper quantile (i.e., 75 %)
Sand depth
Relocation distances did not vary significantly between shallow and deep sand (F 1, 54 = 0.19, P = 0.66; Fig. 3c), but pits were more frequently built in shallow than in deep sand (Z = 2.11, n = 34, P = 0.04; Fig. 3d).
Soil type
Antlions relocated over longer distances in loess than in sandy soil (F 1, 54 = 31.14, P < 0.001; Fig. 3e), but exhibited no significant variation in their pit construction behavior (Z = 0.62, n = 35, P = 0.53; Fig. 3f).
Discussion
Here, we studied for the first time behavioral repeatability and personality in pit-building antlion larvae, under three different environmental contexts. Relocation distances were highly repeatable over time, under both the favorable and unfavorable conditions of each of the three environmental contexts. However, movement directionality demonstrated mixed results. While displacement-to-distance was repeatable between days, the turning angle SD showed weak repeatability. In other words, the two components of behavioral repeatability, i.e., the energy invested in a specific behavior (here, movement distance) and the investment pattern in the same behavior (here, movement directionality), exhibited different patterns. We thus suggest that behavioral repeatability and personality should be measured at more than one level. Individuals also displayed high repeatability in pit construction behavior, relocation distance, and displacement-to-distance under differing levels of sand depths and soil types but not of thermal conditions. Finally, although rank order behaviors were consistent between soil types and soil depths, the average behavioral response differed. Specifically, pits were more frequently built in shallow than in deep sand. In addition, relocation distances were greater in loess than in sandy soil.
Although relocation distances were generally repeatable over time and across the differing conditions of the three environmental contexts, repeatability was much higher in sandy than in loess soil. Though this species is a habitat generalist (Barkae et al. 2012), its favorable substrate is sand (Barkae et al. 2014). Thus, we suggest that unfavorable environments may trigger higher behavioral plasticity than favorable ones. Similarly, stressful environments induce bet-hedging by ovipositing females and phenotypic divergence by the offspring as well as genetic variance in the long term (Hoffmann and Merilä 1999). Although antlion larvae exhibited repeatability over time in relocation distances, this is not necessarily the case in all insects. For example, Muller et al. (2010) detected behavioral repeatability in worker neophobia of new flower colors but only within the same experimental day; between-days repeatability was low. However, as other insects show repeatable behavior across a few days at least, antlion larvae are clearly no exception (e.g., Kolluru 1999; Schuett et al. 2011).
Although we observed repeatable behavior between different soil types, and soil depths, behavior was not repeatable across thermal conditions. At first glance, the latter result might seem to be counterintuitive in light of the cumulative evidence of a link between energy metabolism and personality traits (e.g., Biro and Stamps 2010; Careau and Garland 2012). This is especially true for ectotherms due to their strong dependency on environmental temperature (e.g., Careau et al. 2008; Briffa et al. 2013). Nonetheless, we found that individuals that relocated more than 10 cm under benign conditions reduced their relocation activity under harsh conditions, while the opposite held true for individuals relocating less than 10 cm under benign conditions (not shown). This suggests that individuals exhibit some specialization in either benign or harsh climates. Thermal specialization is a known phenomenon (e.g.,Gilchrist 1996; Angilletta et al. 2003), which could enable some individuals to better face a harsh climate at the expense of reduced activity in a more moderate one. Alternatively, the thermal stress might perhaps have been perceived less immediately by the antlions than other unfavorable conditions, such as loess soil. Larvae were exposed to thermal stress only for 6 h daily, without a preliminary thermal acclimation that may induce physiological change. Pruitt et al. (2011a), for instance, found that under warmer temperatures the spider Anelosimus studiosus exhibited a repeatable reduction in tolerance to conspecifics, an increase in activity level, a tendency to attack multiple prey items, and a shorter latency to attack. In their work, spiders were allowed 6 h of acclimation prior to exposure to each of the five temperatures. Future experiments should disentangle between short-term exposure of late instars and long-term exposure across development to unfavorable temperatures, as the effects of chronic and acute exposure to unfavorable temperatures may often differ (e.g., Wilson and Franklin 2002).
While many studies have investigated activity level, only a few have examined relocation activity in sit-and-wait predators and in central-place foragers in the context of personality. Scharf et al. (2012a), for instance, studied several behaviors of a cavity-dwelling ant, including nest relocation behavior. They found repeatable nest relocation and a trade-off between this trait and colony aggression (i.e., aggressive colonies did not relocate). Second, Pruitt et al. (2011b) found repeatable differences in female choosiness across situations: choosy females relating to the occurrence of prey signals in their new habitat were also choosy regarding the amount of light in their habitat. Third, Wray and Seeley (2011) forced honey bees to choose between several nests. Interestingly, although colonies consistently differed in the waggle dances and active search for nests, they did not differ in the time required to choose a nest. Here, we found that, unlike the strong correlation in relocation activity, movement directionality exhibited low repeatability. This means that activity, a common behavioral trait measured in personality studies, could be studied both as relocation distance and displacement-to-distance, leading to different results, as obtained here.
Based on the differences between relocation distance and directionality, we suggest that repeatability should be measured at two levels: energy expenditure level and expenditure pattern. This strengthens Watanabe et al. (2012) conclusion that each behavioral category, such as boldness, should be measured using more than a single behavioral trait, such as latency to seek shelter in response to predators, combined with latency to re-emerge. These authors have shown that different behavioral traits of the same category do not always agree with each other. Here, we detected a strong consistency in energy expenditure, measured as relocation distance and pit construction. However, we also detected a much lower consistency of the expenditure pattern, i.e., the movement pattern or directionality. Energy expenditure is the level most often measured (e.g., general activity or aggression), while the expenditure pattern is quite often ignored. For active foragers searching for prey, movement pattern is highly important in accurately locating prey (e.g., Nolet and Mooij 2002; Scharf et al. 2012b); for sit-and-wait predators, how far to get from their current position when relocating their ambush site is also of high relevance (e.g., Chmiel et al. 2000). In such cases, a higher repeatability of movement patterns is expected. Nonetheless, in contrast to our hypothesis, it seems that antlions relocate only in order to avoid the error of staying too long at poor sites, with low importance in regard to relocation direction (Nakata and Ushimaru 1999; Scharf and Ovadia 2006).
In addition to behavioral repeatability, comparing the average behavioral responses under varying levels of each environmental context is of interest, in facilitating a better understanding of how abiotic factors affect trap-building predators. First, pits were more frequently constructed in shallow than in deep sand. This is in accord with the results obtained in a semifield experiment using the same species (Loria et al. 2008). In regard to soil type, we found higher relocation activity in loess than in sandy soil. This finding might be explained by the fact that sandy soils in the studied region are more productive in regard to prey availability than loess ones (Noy-Meir 1973). Thus, loess soil triggered higher relocation activity of the larvae, searching for the more productive substrate (Barkae et al. 2014). Trap-building predators relocate if their current location does not meet their needs, while the exact conditions required differ between species (Scharf and Ovadia 2006). For instance, the long-jawed orb-weaving spider prefers sites of high humidity and prey availability and will otherwise relocate (Gillespie and Caraco 1987). Several antlion species are choosy regarding the sand particle size and prefer sand of a specific grain size (e.g., Devetak et al. 2005; Klokočovnik et al. 2012). This is probably related to building an efficient pit, to the probability of prey escaping after falling into the pit, and the time required for capturing the prey. Future studies should explore whether the relocation decision is hierarchical, in the sense that antlions consider each factor individually and have a hierarchy of desired conditions, or alternatively, average over several site characteristics. This is a valid question, and some cavity-dwelling ants, for example, decide hierarchically when relocating and choosing among nests (i.e., the absence of light is more important than the internal nest height, which is more important than the nest entrance size; Franks et al. 2003).
To conclude, we found that antlion larvae displayed repeatable behavior, at least over a few days, and across differing levels of an environmental context. This holds especially true for sand depth and soil type. Importantly, this repeatability was preserved even when the average behavioral response differed between the two levels of the environmental context. A next important step should be to explore behavioral repeatability over longer time periods and to incorporate important physiological measures, such as metabolic rate, its repeatability, and its relation to the documented behavioral traits.
References
Abràmoff MD, Magalhães PJ, Ram SJ (2004) Image processing with. Image J Biophotonics Intern 11:36–43
Alcalay Y, Barkae ED, Ovadia O, Scharf I (2014) Consequences of the instar stage for behaviour in a pit-building antlion. Behav Process 103:105–111
Angilletta MJ, Wilson RS, Navas CA, James RS (2003) Tradeoffs and the evolution of thermal reaction norms. Trends Ecol Evol 18:234–240
Archard G, Braithwaite V (2010) The importance of wild populations in studies of animal temperament. J Zool 281:149–160
Barkae ED, Scharf I, Abramsky Z, Ovadia O (2012) Jack of all trades, master of all: a positive association between habitat niche breadth and foraging performance in pit-building antlion larvae. PLoS One 7:e33506
Barkae ED, Abramsky Z, Ovadia O (2014) Can models of density-dependent habitat selection be applied for trap-building predators? Popul Ecol 56:175–184
Bell A (2005) Behavioural differences between individuals and two populations of stickleback (Gasterosteus aculeatus). J Evol Biol 18:464–473
Bell AM (2007) Future directions in behavioural syndromes research. Proc R Soc Lond B Biol Sci 274:755–761
Bell AM, Hankison SJ, Laskowski KL (2009) The repeatability of behaviour: a meta-analysis. Anim Behav 77:771–783
Biro PA, Stamps JA (2010) Do consistent individual differences in metabolic rate promote consistent individual differences in behavior? Trends Ecol Evol 25:653–659
Briffa M, Bridger D, Biro PA (2013) How does temperature affect behaviour? Multilevel analysis of plasticity, personality and predictability in hermit crabs. Anim Behav 86:47–54
Burns JG (2008) The validity of three tests of temperament in guppies (Poecilia reticulata). J Comp Psychol 122:344–356
Careau V, Garland T (2012) Performance, personality, and energetics: correlation, causation, and mechanism. Physiol Biochem Zool 85:543–571
Careau V, Thomas D, Humphries M, Réale D (2008) Energy metabolism and animal personality. Oikos 117:641–653
Chmiel K, Herberstein ME, Elgar MA (2000) Web damage and feeding experience influence web site tenacity in the orb-web spider Argiope keyserlingi Karsch. Anim Behav 60:821–826
Dall SRX, Kotler BP, Bouskila A (2001) Attention, ‘apprehension’ and gerbils searching in patches. Ann Zool Fenn 38:15–23
Dall SRX, Houston AI, McNamara JM (2004) The behavioural ecology of personality: consistent individual differences from an adaptive perspective. Ecol Lett 7:734–739
Danin A (1978) Plant species diversity and plant succession in a sandy area in the Northern Negev. Flora 167:409–422
Devetak D (2008) Substrate particle size preference of wormlion Vermileo vermileo (Diptera: Vermileonidae) larvae and their interaction with antlions. Eur J Entomol 105:631–635
Devetak D, Špernjak A, JanžekoviČ F (2005) Substrate particle size affects pit building decision and pit size in the antlion larvae Euroleon nostras (Neuroptera: Myrmeleontidae). Physiol Entomol 30:158–163
Dingemanse NJ, Wolf M (2010) Recent models for adaptive personality differences: a review. Philos Trans R Soc Lond B Biol Sci 365:3947–3958
Dingemanse NJ, Both C, Drent PJ, van Oers K, van Noordwijk AJ (2002) Repeatability and heritability of exploratory behaviour in great tits from the wild. Anim Behav 64:929–938
Duckworth RA (2006) Behavioral correlations across breeding contexts provide a mechanism for a cost of aggression. Behav Ecol 17:1011–1019
Eltz T (1997) Foraging in the ant-lion Myrmeleon mobilis hagen 1888 (neuroptera: Myrmeleontidae): behavioral flexibility of a sit-and-wait predator. J Insect Behav 10:1–11
Evenari M (1982) The Negev: the challenge of a desert. Harvard University Press, Harvard
Falconer D, Mackay T (1996) Introduction to quantitative geneticss, 4th edn. Pearson/Prentice Hall, Harlow
Franks NR, Mallon EB, Bray HE, Hamilton MJ, Mischler TC (2003) Strategies for choosing between alternatives with different attributes: exemplified by house-hunting ants. Anim Behav 65:215–223
Gilchrist GW (1996) A quantitative genetic analysis of thermal sensitivity in the locomotor performance curve of Aphidius ervi. Evolution 50:1560–1572
Gillespie RG, Caraco T (1987) Risk-sensitive foraging strategies of two spider populations. Ecology: 68:887–899
Goldreich Y (2003) The climate of Israel: observation, research, and application. Kluwer Academic/Plenum Publishers, New York
Gosling SD (2001) From mice to men: what can we learn about personality from animal research? Psychol Bull 127:45–86
Gotelli NJ (1993) Ant lion zones: causes of high-density predator aggregations. Ecology 74:226–237
Hayes JP, Jenkins SH (1997) Individual variation in mammals. J Mammal 78:274–293
Hoffmann AA, Merilä J (1999) Heritable variation and evolution under favourable and unfavourable conditions. Trends Ecol Evol 14:96–101
Hollander FA, Van Overveld T, Tokka I, Matthysen E (2008) Personality and nest defence in the great tit (Parus major). Ethology 114:405–412
Klokočovnik V, Devetak D, Orlačnik M (2012) Behavioral plasticity and variation in pit construction of antlion larvae in substrates with different particle sizes. Ethology 118:1102–1110
Kolluru GR (1999) Variation and repeatability of calling behavior in crickets subject to a phonotactic parasitoid fly. J Insect Behav 12:611–626
Kralj-Fišer S, Schuett W (2014) Studying personality variation in invertebrates: why bother? Anim Behav 91:41–52
Loria R, Scharf I, Subach A, Ovadia O (2008) The interplay between foraging mode, habitat structure, and predator presence in antlions. Behav Ecol Sociobiol 62:1185–1192
Marsh AC (1987) Thermal responses and temperature tolerance of a dessert ant-lion larva. J Therm Biol 12:295–300
Muller H, Grossmann H, Chittka L (2010) ‘Personality’ in bumblebees: individual consistency in responses to novel colours? Anim Behav 80:1065–1074
Nakata K, Ushimaru A (1999) Feeding experience affects web relocation and investment in web threads in an orb-web spider, Cyclosa argenteoalba. Anim Behav 57:1251–1255
Nolet BA, Mooij WM (2002) Search paths of swans foraging on spatially autocorrelated tubers. J Anim Ecol 71:451–462
Noy-Meir I (1973) Desert ecosystems: environment and producers. Annu Rev Ecol Syst 4:25–51
Price T, Langen T (1992) Evolution of correlated characters. Trends Ecol Evol 7:307–310
Pruitt JN, Riechert SE (2012) The ecological consequences of temperament in spiders. Curr Zool 58:589–596
Pruitt JN, Demes KW, Dittrich‐Reed DR (2011a) Temperature mediates shifts in individual aggressiveness, activity level, and social behavior in a spider. Ethology 117:318–325
Pruitt JN, DiRienzo N, Kralj-Fišer S, Johnson JC, Sih A (2011b) Individual-and condition-dependent effects on habitat choice and choosiness. Behav Ecol Sociobiol 65:1987–1995
Réale D, Reader SM, Sol D, McDougall PT, Dingemanse NJ (2007) Integrating animal temperament within ecology and evolution. Biol Rev 82:291–318
Roberts BW, DelVecchio WF (2000) The rank-order consistency of personality traits from childhood to old age: a quantitative review of longitudinal studies. Psychol Bull 126:3–25
Ruxton G, Hansell M (2009) Why are pitfall traps so rare in the natural world? Evol Ecol 23:181–186
Scharf I, Ovadia O (2006) Factors influencing site abandonment and site selection in a sit-and-wait predator: a review of pit-building antlion larvae. J Insect Behav 19:197–218
Scharf I, Filin I, Golan M, Buchshtav M, Subach A, Ovadia O (2008a) A comparison between desert and Mediterranean antlion populations: differences in life history and morphology. J Evol Biol 21:162–172
Scharf I, Subach A, Ovadia O (2008b) Foraging behaviour and habitat selection in pit-building antlion larvae in constant light or dark conditions. Anim Behav 76:2049–2057
Scharf I, Filin I, Ben-Yehoshua D, Ovadia O (2009a) Phenotypic plasticity and variation in morphological and life-history traits of antlion adults across a climatic gradient. Zoology 112:139–150
Scharf I, Filin I, Ovadia O (2009b) A trade-off between growth and starvation endurance in a pit-building antlion. Oecologia 160:453–460
Scharf I, Barkae ED, Ovadia O (2010) Response of pit-building antlions to repeated unsuccessful encounters with prey. Anim Behav 79:153–158
Scharf I, Lubin Y, Ovadia O (2011) Foraging decisions and behavioural flexibility in trap‐building predators: a review. Biol Rev 86:626–639
Scharf I, Modlmeier AP, Fries S, Tirard C, Foitzik S (2012a) Characterizing the collective personality of ant societies: aggressive colonies do not abandon their home. PLoS One 7:e33314
Scharf I, Ovadia O, Foitzik S (2012b) The advantage of alternative tactics of prey and predators depends on the spatial pattern of prey and social interactions among predators. Popul Ecol 54:187–196
Schuett W, Godin JGJ, Dall SRX (2011) Do female zebra finches, Taeniopygia guttata, choose their mates based on their ‘personality’? Ethology 117:908–917
Sih A, Kats LB, Maurer EF (2003) Behavioural correlations across situations and the evolution of antipredator behaviour in a sunfish–salamander system. Anim Behav 65:29–44
Sih A, Bell A, Johnson JC (2004a) Behavioral syndromes: an ecological and evolutionary overview. Trends Ecol Evol 19:372–378
Sih A, Bell AM, Johnson JC, Ziemba RE (2004b) Behavioral syndromes: an integrative overview. Q Rev Biol 79:241–277
Sih A, Cote J, Evans M, Fogarty S, Pruitt J (2012) Ecological implications of behavioural syndromes. Ecol Lett 15:278–289
Simon D (1988) Ant-lions (Neuroptera: Myrmeleontidae) of the coastal plain: systematical, ecological, and zoogeographical aspects with emphasis on the coexistence of a species guild of the unstable dunes. PhD thesis, Tel-Aviv University, Israel
Sinn DL, Moltschaniwskyj NA, Wapstra E, Dall SRX (2010) Are behavioral syndromes invariant? Spatiotemporal variation in shy/bold behavior in squid. Behav Ecol Sociobiol 64:693–702
Stahlschmidt Z, O’Leary ME, Adamo S (2014) Food limitation leads to risky decision making and to tradeoffs with oviposition. Behav Ecol 25:223–227
Stamps J, Groothuis TG (2010) The development of animal personality: relevance, concepts and perspectives. Biol Rev 85:301–325
Watanabe NM, Stahlman WD, Blaisdell AP, Garlick D, Fast CD, Blumstein DT (2012) Quantifying personality in the terrestrial hermit crab: different measures, different inferences. Behav Process 91:133–140
Wilson DS (1998) Adaptive individual differences within single populations. Philos Trans R Soc Lond B Biol Sci 353:199–205
Wilson RS, Franklin CE (2002) Testing the beneficial acclimation hypothesis. Trends Ecol Evol 17:66–70
Wolf M, Weissing FJ (2012) Animal personalities: consequences for ecology and evolution. Trends Ecol Evol 27:452–461
Wray MK, Seeley TD (2011) Consistent personality differences in house-hunting behavior but not decision speed in swarms of honey bees (Apis mellifera). Behav Ecol Sociobiol 65:2061–2070
Acknowledgments
We are grateful to Aziz Subach for his help in the experimental design, Naama Snir for her assistance in the laboratory, and Naomi Paz for editorial assistance. The research leading to this manuscript was partially funded by the People Programme (Marie Curie Actions) of the European Union’s Seventh Framework Programme (FP7/2007-2013) under an REA grant agreement no. (333442) to IS.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Communicated by W. O. H. Hughes
Rights and permissions
About this article

Cite this article
Alcalay, Y., Ovadia, O. & Scharf, I. Behavioral repeatability and personality in pit-building antlion larvae under differing environmental contexts. Behav Ecol Sociobiol 68, 1985–1993 (2014). https://doi.org/10.1007/s00265-014-1804-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00265-014-1804-x