
Abstract
Individual variation in behavioral strategies is ubiquitous in nature. Yet, explaining how this variation is being maintained remains a challenging task. We use a spatially-explicit individual-based simulation model to evaluate the extent to which the efficiency of an alternative spacing tactic of prey and an alternative search tactic of predators are influenced by the spatial pattern of prey, social interactions among predators (i.e., interference and information sharing) and predator density. In response to predation risk, prey individuals can either spread out or aggregate. We demonstrate that if prey is extremely clumped, spreading out may help when predators share information regarding prey locations and when predators shift to area-restricted search following an encounter with prey. However, dispersion is counter-selected when predators interact by interference, especially under high predator density. When predators search for more randomly distributed prey, interference and information sharing similarly affect the relative advantage of spreading out. Under a clumped prey spatial pattern, predators benefit from shifting their search tactic to an area-restricted search following an encounter with prey. This advantage is moderated as predator density increases and when predators interact either by interference or information sharing. Under a more random prey pattern, information sharing may deteriorate the inferior search tactic even more, compared to interference or no interaction among predators. Our simulation clarifies how interactions among searching predators may affect aggregation behavior of prey, the relative success of alternative search tactics and their potential to invade established populations using some other search or spacing tactics.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Conspecifics in nature frequently vary in behavior, life-history strategies and morphology (e.g., Brockmann 2001; Rowland and Emlen 2009). The ubiquity of individual variation is difficult to explain, because it should be reduced by natural/sexual selection (i.e., selection in favor of the genotype giving rise to the best adapted phenotype) and drift (e.g., Sinervo and Lively 1996; Fitzpatrick et al. 2009). Since alternative phenotypes may succeed better under certain conditions, it is important to understand in which context rare phenotypes carry a fitness advantage that allow them to invade established populations of other phenotypes. Evolutionary games of this type can be explored using the classical concept of evolutionary stable strategy (ESS; Maynard Smith 1989) and/or the alternative concept of neighborhood invader strategy (NIS; Apaloo 1997). While ESS is well established in evolutionary theory, the NIS concept is less often discussed.
A NIS is a phenotype that is capable of invading all established populations of its neighbors/competitors comprising the common phenotype. This phenotype is not necessarily at the same time an ESS, and vice versa (Kisdi and Meszéna 1995; Apaloo 1997). If a NIS is not an ESS, it will be unable to completely repel all of its near neighbors, but only to invade the population to some extent. This should result in a polymorphism, i.e., the coexistence of several strategies. In contrast, an evolutionary stable NIS (ESNIS) is able first to invade and take-over the population and then to prevent any further mutant invasions, resulting in ESNIS being the only observable strategy (Apaloo 1997). Finally, a strategy may be an ESS but not a NIS. In this case, the strategy cannot be invaded once established, but it may not be able to invade an established strategy. Thus, it may go extinct, coexist with competitors or dominate the population, depending on the specific context, such as the sequence of invading mutants (Kisdi and Meszéna 1995; Apaloo 1997).
Grouping and clustering of prey have been long considered as successful anti-predation strategies (e.g., Hamilton 1971; Bednekoff and Lima 1998). Numerous studies have shown that animals within groups have higher chances to escape predation, owing to various, non-exclusive mechanisms (Krause and Ruxton 2002, p. 7). Less research has been devoted to exploring situations, in which clustering may increase predation risk and thus dispersion or spacing out should be favorable anti-predation strategies (e.g., Taylor 1976; Connell 2000). Several conditions under which it is better to disperse have been suggested, such as when the predator is much larger than the prey and can consume many prey items (Taylor 1976), or when the prey is cryptic, but clumped prey is more easily detectable (the signal of detection increases with group size; e.g., Connell 2000; Ioannou and Krause 2008). Clearly, the benefit of aggregation in response to predation is context and system specific. Thus, investigating factors, which can affect spacing decisions and spatial patterns of animals, can largely contribute to the identification of the dominant selective forces organisms are subject to, such as competition or predation risk (e.g., Scharf et al. 2008).
The spatial pattern of prey should affect the search tactic of predators (e.g., Benhamou 1992; Motro and Shmida 1995). For instance, clumped prey is best detected using a directional movement followed, if prey is encountered, by an area-restricted search (ARS) (e.g., Benhamou 1992; Nolet and Mooij 2002). The purpose of this shift is to locate more prey items near the first one encountered, if prey is positively auto-correlated in space. In contrast, spatially over-dispersed prey is better detected by a directional movement after prey detection, as prey is negatively auto-correlated in space (Scharf et al. 2009). When most prey is clumped, a rare alternative tactic of moving outside of clumps, as a way to avoid predation, may invade the population. Similarly, when most prey individuals show a regular pattern, rare individuals that aggregate might benefit from this behavior as long as predators do not change their searching tactic.
The advantage of an isolated prey individual, as well as the foraging success of predators, may not only depend on the spatial pattern of most prey individuals and the consequent search tactic of predators, but also on the social interactions among predators. Two common interactions among foragers are interference, when an individual directly prevents others from accessing a shared resource (Keddy 2001), and information sharing, when individuals join resources discovered by others (Prokopy and Roitberg 2001). Both interactions may not only affect individual predators and their hunting success, but also the behaviour of the prey. Predators search best for clumped prey by combining directional and tortuous movement before and after prey detection, respectively. Hence, predators using an inflexible search tactic (only directional search) should be inferior compared to predators adopting a flexible search tactic. However, search tactics of predators (similarly to prey positioning) are diverse in nature (e.g., Nemiroff and Despland 2007; Farwell and McLaughlin 2009), and studying the factors contributing to this variation is therefore of interest. Social interactions among searching predators might be important factors moderating the inferiority of some search tactics and contributing to behavioral variation. Information sharing is already known to reduce the variance in intake rate among foraging individuals (Ruxton et al. 1995).
The current study explores the possible success and invasive potential of rare phenotypes, in respect to searching behavior of predators and spatial positioning of prey. Studies of alternative behavioral strategies and their potential to invade the population are common (e.g., alternative reproduction strategies; Gross 1996; Sinervo and Lively 1996), but less attention has been devoted to the invasive potential of alternative search tactics for food items (but see, for instance, producer-scrounger games; e.g., Barnard and Sibly 1981). We use a spatially-explicit individual-based simulation model to explore how the search tactics of predators and their mutual interactions affect the optimal decision of prey whether or not to cluster. We also examine the performance of a predator using a deviant search tactic compared to all other predators, which again can be engaged in different types of interactions. More specifically, we explore the effect of increasing predator density on the relative proportion of clumped and isolated discovered prey, when predators do not interact with each other, share information, or are engaged in interference competition. Simulations are done with predators either programmed to use a fixed directionality level while searching (hereafter, inflexible search tactic) or to switch to ARS after detection of prey (hereafter, flexible search tactic), and are repeated using prey spatial patterns differing in patchiness.
We predict that isolated prey should be more frequently detected when predators do not share information with each other. Information sharing should attract more predators to prey clusters, consequently predators will spend more time searching for prey in such clusters and isolated prey will be less likely to be detected. This pattern should be more pronounced when predators use a flexible search tactic (i.e., they switch to ARS after prey detection) and when prey individuals are strongly clumped in space. Predators using alternative search tactics should show a similar performance as the majority of predators when information can be shared, compared to situations in which predators do not interact. Information sharing should therefore mitigate either its advantage or inferiority compared to the majority of predators.
Methods
Simulation design
We simulated groups of predators searching for sedentary hidden prey in a continuous space (80 × 80 space units). Each simulation lasted for 100 time units. Prey items (~180 of a total of 200) were distributed in a clumped pattern, using the method described in Travis and Palmer (2005): The first prey item was randomly positioned. Then each additional prey item had a probability of (1 − z) to be located nearby (within a certain radius). But if according to that probability (z), the next prey item should not be located next to the previous one, a new random location was chosen. The same decision is made for the next prey item, and so on [see section 2(a) in Travis and Palmer (2005) for a more detailed explanation]. We used r = 2 (i.e., the maximal radius between two adjacent prey items) and four degrees of patchiness (from high to low): z = 0.1, 0.3, 0.6 and 0.8 (i.e., the probability of two prey items not to be clustered) for each spatial pattern. However, not all prey items appeared in clumps, and ~10% of the prey (~20 of 200) was distributed randomly in space. We checked for the degree of patchiness of the four spatial patterns, by distributing prey 1000 times in both spatial patterns and comparing the nearest-neighbour index of aggregation (NNI; Krebs 1999 pp. 192–195). Smaller values indicate a more clumped spatial pattern. As expected, NNI values decreased as the spatial pattern became more clumped [z = 0.8: NNI: 0.745 (0.678, 0.813) (mean, 95% quantiles); z = 0.6: NNI: 0.635 (0.568, 0.705); z = 0.3: NNI: 0.485 (0.424, 0.550); z = 0.1: 0.419 (0.360, 0.482)]. We refer to a prey item having a neighbour in a distance smaller or larger than 2r as clumped or isolated, respectively [92.6 (90.5, 94.5) and 88.8 (85.0, 92.5) (mean, 95% quantiles)] of the prey was clumped according to the above definition when z = 0.1 and 0.8, respectively). See Fig. 1 for two characteristic prey distributions when z = 0.1 and 0.8. Clumped and isolated prey, according to this distance-to-nearest-neighbor definition, is marked.

Two exemplary spatial distributions of prey items (200), when a prey is clumped (z = 0.1), and when b prey is more randomly distributed (z = 0.8). Diamonds represent prey items in clusters while squares represent isolated ones, according to the distance-to-nearest-neighbor cut-off definition (see “Methods”). The cut-off point is a distance of 2r (4 space units) to the nearest prey neighbour
Initial predators’ positions and directions were random. Predators moved in a correlated random walk with a fixed step length of 1.5 space units and direction determined as follows. The direction was based on the direction in the previous step plus a random number taken from a normal distribution with a mean of zero and SD of one, multiplied by a number, which we named “directionality coefficient”. Predators adopting an inflexible search tactic were assigned a small directionality coefficient of 0.2 rad, which remained unchanged, meaning that their movement was highly directional throughout the entire simulation episode [i.e., two successive steps differed by an angle taken from a normal distribution (mean of zero and SD of one) multiplied by 0.2]. In contrast, predators adopting a flexible search tactic began by using a relatively directional movement (directionality coefficient of 0.2), but after encountering a prey they switched to an ARS for seven time steps. Predators located prey when it entered their detection range of prey (a radius of 1.5 space units). Once the predator detected a prey item, it moved to the prey location and consumed it. The ARS was a more tortuous movement with a directionality coefficient of 3 rad, and was characterized by frequent turns (i.e., two successive steps differed by an angle taken from a random distribution multiplied by 3). In the case of the ARS, the large directionality coefficient resulted in turning angle distribution that was approximately circular uniform. The ARS duration could last longer if several prey items were found successively. The counter was reset each time prey was encountered. Once ARS was completed, the directional movement was resumed. This search tactic is especially useful in clumped spatial patterns, and often used by foraging animals (e.g., bees: Motro and Shmida 1995; swans: Nolet and Mooij 2002). When several predators simultaneously discovered a prey item, only one of them was allowed to consume it (randomly chosen), but all predators which detected a prey (i.e., their detection radius included a prey item) switched to ARS, since although they did not necessarily consume the prey, they gained knowledge on its existence. This is indeed what usually happens in nature—prey detection even without consumption is enough to induce ARS (e.g., Nakamuta 1985).
When predators left the simulation arena, they reappeared from the opposite side (i.e., a torus model), as used in previous simulations of searching animals (e.g., Nolet and Mooij 2002; Travis and Palmer 2005; Scharf et al. 2009). This method simulates searching in a large homogenous area and does not interfere with the direction of movement in contrast to other possible methods of dealing with the arena edges, such as reflecting or absorbing boundaries. Consumed prey items were not renewed, leading to gradual depletion. Predators did not satiate, similarly to other simulations modeling searching for prey (e.g., Benhamou 1992; Nolet and Mooij 2002; Scharf et al. 2009). Predator satiation was abstracted of two reasons: First, it is already known that fast-satiating predators select for increased prey clustering (Taylor 1976); second, it is unclear how fast predators should satiate, as it surely depends on the relative size of predators and prey, i.e., highly system-specific. In addition, we did not allow for prey renewal during the simulation (i.e., allowing depletion). We also assumed that handling time is short enough to be abstracted. Forcing predators to have some handling time is equivalent to reducing the habitat profitability by different measures (e.g., decreasing the available time for foraging or decreasing prey abundance) (Scharf et al. 2009). These three key assumptions (very slow predator satiation, very slow prey renewal and almost no handling time) are typical of searching for a hidden prey which is much smaller than the predator.
Interference or information sharing between predators occurred when two predators entered a minimal detection radius (d = 5 space units for both types of interaction). Interference caused both predators stepping back in opposite directions for two space units (regardless if they were in ARS or not), waiting for two time steps, and resuming a directional movement in a new random direction. Information sharing occurred when one predator, not using ARS, was within the detection range of another predator, which was using ARS, indicating that a prey item was found. The first predator then moved to the position of the second one and started searching using ARS. A predator using ARS, therefore, attracts all predators nearby. They simply move towards its location and start using ARS as well, as if they found a prey item by themselves. Note that this is a simple form of information sharing, and other more complex forms certainly exist in nature, such as combining personal experience with social information. Predators were programmed to first search for prey and consume it and then to interact with other predators either by interfering or sharing information. It is possible that changing the order of events would affect the results to some extent (as shown in Ruxton 1996), as well as changing other parameters, such as detection range of prey and/or other predators [see Electronic Supplementary Material (ESM) for a sensitivity analysis].
Isolation of prey and survival rates
We replicated each treatment combination (predator number × predator search tactic × prey spatial structure) for 1500 times and documented the proportions of isolated and clumped prey found by the predators out of the total number of prey items of these both categories (i.e., consumed isolated prey divided by total isolated prey and consumed clumped prey divided by total clumped prey). The method we used to create the spatial pattern resulted in much more clumped prey items (ratio of ~1:10), and therefore proportions of encountered prey were used instead of numbers. We define ‘the relative success of isolated prey’ to be the proportion of clumped prey found by the predators minus the proportion of isolated prey found by the predators. Thus, values above zero indicate an advantage for isolated prey (it is less often located by the predator), while values below zero indicate an advantage for clumped prey. We varied predator number or density, as a covariate, nested in a three-way factorial design of prey spatial pattern (4 levels) × predator search tactic (flexible vs. inflexible; 2 levels) × predator interaction type (3 levels).
The advantage of an alternative search tactic
We analyzed the relative success of a predator employing an alternative search tactic. We used the identical platform and factorial design described above. When most predators used a flexible search tactic (i.e., switching to ARS after an encounter with prey), the deviant predator used an inflexible search tactic (no ARS), and vice versa—if all predators used the inflexible search tactic, the deviant one was the only predator using the flexible tactic. We tested both scenarios using increasing predator densities. There was only one deviant predator in each scenario, resulting in a decrease in the ratio between the deviant predator and the predators using the common search tactic as predator density increases. When predators used the inflexible search tactic, sharing information attracted more predators to the area in which prey was located, but those predators using the inflexible search tactic never switched to ARS. We define ‘the relative success of deviant predator’ as the number of prey items detected by the deviant predator minus the average number of prey items detected by each predator using the common tactic. Thus, values below zero indicate an advantage for the majority over the deviant predator (it detects fewer prey items), while values above zero indicate an advantage for the deviant predator over the majority. We repeated each treatment for 1500 times.
Data and sensitivity analyses
We plotted the ‘relative success of isolated prey’ in the first simulation and ‘relative success of deviant predator’ in the second one for the above treatments, and looked for trends. Using standard statistics for analysis of simulation data is problematic, because many data points can be easily generated in order to improve statistical significance and because the contrasts among scenarios/treatment groups can be easily increased (Grimm and Railsback 2006). We thus do not perform statistical analyses; rather we focus on the figures and relate to the trends revealed. We present the mean values for 1500 simulation replications of each treatment combination. We used the percentile bootstrap test (Manly 1997) to estimate 95% confidence intervals. Presenting confidence intervals, which are insensitive to sample size, is advantageous over standard deviation or standard error.
Simulation models might be sensitive to the values of parameters used, and for that purpose a sensitivity analysis is required. Such an analysis (see ESM) examines the extent to which the model is sensitive to different parameter values (Grimm and Railsback 2006). Briefly, we test the sensitivity of two of the model main scenarios and demonstrate that they are relatively insensitive to different parameter values (i.e., main patterns remain qualitatively the same). We also tested if an increase in the frequency of different tactics of prey and predators affect their relative success. The sensitivity analysis (ESM) showed that the model was robust to 10–20% change of different parameters.
Results
Isolation of prey and survival rates
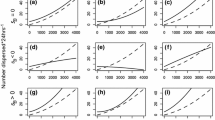
Irrespective of the spatial pattern of prey or how predators interacted with each other, isolated prey items were less frequently detected by predators using a flexible search tactic relative to clumped prey (relative success of isolated prey >0; Fig. 2). This was usually the case when using different parameter values (see ESM). The opposite pattern occurred when predators used an inflexible search tactic (relative success of isolated prey <0; Fig. 3). The relative proportion of clumped versus isolated prey encountered by predators using a flexible search tactic changed with their density; however, this pattern was inconsistent among the different social interactions examined (Fig. 2). In addition, there was an interaction between predator social interactions and prey spatial pattern. When prey was highly clumped and predators either shared information or did not interact, higher predator density increased the relative advantage of isolated prey over clumped prey (Fig. 2a). However, when predators interfered with each other a slight increase followed by a decrease in the ‘relative success of isolated prey’ with predator density was evident (Fig. 2a). In contrast, when the prey spatial pattern was the least clumped, irrespective of how predators interact with each other, increased predator density resulted in an increased relative advantage of isolated prey over clumped prey (Fig. 2d). The two intermediate levels of patchiness showed intermediate levels of differences between interference and other interaction types.

The relationship between the number of predators searching for prey and the relative success of isolated prey compared to prey in clumps (success of isolated prey is calculated as the proportion of clumped prey items caught by predators minus the proportion of isolated prey items caught by predators; mean ± 95% confidence intervals). Predators use the flexible search tactic (switch to ARS after detection of prey) and search in four spatial patterns of prey, from more clumped to more random: a z = 0.1; b z = 0.3; c z = 0.6; and d z = 0.8. Triangles, squares and diamonds represent different interactions among predators (information sharing, interference and no interaction, respectively). The data points are joined using lines, meant only for trend visualization. Note that a and b differ from c and d in the y-axis scale

The relationship between the number of predators searching for prey and the relative success of isolated prey compared to prey in clumps (success of isolated prey is calculated as the proportion of clumped prey items caught by predators minus the proportion of isolated prey caught by predators; mean ± 95% confidence intervals). Predators use the inflexible search tactic (no ARS) and search in four spatial patterns of prey, from more clumped to more random: a z = 0.1; b z = 0.3; c z = 0.6; and d z = 0.8. Triangles, squares and diamonds represent different interactions among predators (information sharing, interference and no interaction, respectively). The data points are joined using lines, meant only for trend visualization. Note that a and b differ from c and d in the y-axis scale
When predators used an inflexible search tactic (i.e., no ARS), increased predator density resulted in increased relative advantage of clumped prey over isolated prey (Fig. 3). This pattern appeared consistent among the three types of predator interactions, and was similar when comparing among different prey spatial patterns (i.e., more clumped and more random patterns). However, the strength of this pattern (i.e., the negative values) was much stronger in the more clumped spatial pattern and weaker in the more random ones (Fig. 3). Thus, the search tactic of predators, interactions among predators and predator density all interacted to affect the relative success of isolated prey.
The advantage of an alternative search tactic
When prey was clumped and the majority of predators used the flexible search tactic (including the ARS after an encounter with prey), a predator exhibiting an alternative inflexible search tactic was less successful in capturing prey than all other predators (Fig. 4a, b). This inferiority of the deviant predator, however, was moderated with increased predator density, and this moderation was faster when information was shared (Fig. 4a, b), since inferior predators could copy the behavior of more successful ones. As the prey spatial pattern became less clumped, the deviant inflexible predator did gradually better (Fig. 4c, d are qualitatively different than Fig. 4a, b). The reason was that a flexible search tactic is generally more successful in clumped spatial pattern, while the inflexible tactic does better in more random spatial patterns of prey (compare the success of deviant flexible and inflexible predators in more clumped and more random spatial patterns of prey; see also Scharf et al. 2009). Information sharing when most predators used the flexible search tactic and searched in more random patterns decreased their success relative to that of the deviant inflexible predator (Fig. 4c, d). It is an example of how wrong information sharing can decrease foraging success. When the majority of predators used the inflexible search tactic (no ARS) and prey was clumped, a deviant predator capable of switching to ARS after prey detection was more successful in capturing prey (Fig. 5a, b). This superiority of the deviant predator decreased with increasing predator density. When searching in a more random pattern, an opposite result was evident and the flexible search tactic was inferior (Fig. 5c, d). Interactions among predators did not affect the results to a large extent in this case.

The relationship between the number of predators searching for prey and the relative success of a predator using a deviant inflexible search tactic (no ARS), while the majority are using the flexible one (switch to ARS after detection of prey). Success of deviant predator is calculated as the number of prey items detected by the deviant predator minus average number of prey items detected by predators using the common search tactic (mean ± 95% confidence intervals). Predators search in four spatial patterns of prey, from more clumped to more random: a z = 0.1; b z = 0.3; c z = 0.6; and d z = 0.8. Triangles, squares and diamonds represent different interactions among predators (information sharing, interference and no interaction, respectively). The data points are joined using lines, meant only for trend visualization. Note that a and b differ from c and d in the y-axis scale

The relationship between the number of predators searching for prey and the relative success of a predator using a deviant flexible search tactic (switch to ARS after detection of prey), while the majority are using the inflexible one (no ARS). Success of deviant predator is calculated as the number of prey items detected by the deviant predator minus average number of prey items detected by predators using the common search tactic (mean ± 95% confidence intervals). Predators search in four spatial patterns of prey (from more clumped to more random: a z = 0.1; b z = 0.3; c z = 0.6; and d z = 0.8. Triangles, squares and diamonds represent different interactions among predators (information sharing, interference and no interaction, respectively). The data points are joined using lines, meant only for trend visualization. Note that a and b differ from c and d in the y-axis scale
Discussion
We test here the relative success of two alternative tactics of predators and prey using a spatially-explicit simulation, allowing for social interactions on a spatial basis (i.e., only close individuals interact). We show that spreading out may be a successful invading strategy for prey individuals, when predators switch to ARS after prey encounters. Thus, spreading out can reduce predation risk as was previously suggested (e.g., Tinbergen et al. 1967; Taylor 1976; Scharf et al. 2009). However, the relative success of spreading out depends on predator density, the nature of interactions among predators and the spatial pattern of prey. We also demonstrate that the disadvantage of inflexible predators (not switching to ARS) in a clumped pattern of prey is reduced by either interference or information sharing among predators and by increasing predator density and that flexible searching predators are superior over inflexible predators, when prey is clumped.
The type of interaction among predators affects the benefits of spreading out and may also increase the survival rate of prey or the success rate of predators with inferior tactics. When predators share information they harvest clumped prey more efficiently and thus the advantage of isolated prey over clumped prey increases. As predator density rises, isolation becomes more beneficial relative to aggregated prey. A better detection rate of patches and a more thorough exploitation are consequences of searching in groups (e.g., Ranta et al. 1993; Hancock et al. 2006). Both processes could raise the advantage of isolated prey, improving its potential to invade a population which usually aggregates. As predator density increases, each predator will have a higher chance to locate another predator that uses ARS in its vicinity, which indicates that prey was recently detected. Thereby they increase the chances that more predators will be attracted to the same patch. When information is shared, inferior predators can improve their hunting success by better directing themselves towards the prey location when they cross the way of a predator which has recently detected a prey item. Previous models demonstrated that information sharing decreases both the mean uptake per forager and the variance among foragers (e.g., Ruxton et al. 1995; Hancock et al. 2006). Yet, the impact of information sharing on prey aggregation was rarely discussed (but see Hamblin et al. 2010). Hamblin et al. (2010) demonstrated that sharing information decreases the advantage of clumping, as was also illustrated here. Both studies reach similar conclusions, although they use different modeling approaches (e.g., grid vs. continuous space or random walk vs. correlated random walk).
When predators search in a more random spatial pattern of prey, the flexible search tactic is inferior to the inflexible tactic. Information sharing does not help to recover the reduced success rate of flexible searchers, but deteriorates it even more (Fig. 4c, d). Information about prey detection is not relevant here, as prey is less auto-correlated in space. This is an example of how actions based on irrelevant information can lead to poor results (Giraldeau et al. 2002). In these cases, individual learning should be preferred, if the associated costs of learning by self-experience are not too large (Kendal et al. 2005). Interference and information sharing among predators can have opposite effects on the benefits of spreading (Fig. 2a). When predators are engaged in interference competition, increased predator density weakens the survival of isolated prey while information sharing increases it. Dense patches probably attract several predators, which exploit the patch using ARS. Interference, as programmed here, stops the ARS and forces the predators to move away from each other, resulting in a negative correlation between predator density and the relative benefit of isolated prey over clumped ones. Interference therefore blurs the difference between more successful and inferior search tactics.
Similarly, foraging birds usually shift from searching in the richest patch available to poorer patches as interference increases, this procedure leads to a balanced distribution of animals among patches (Johnson et al. 2006), and may decrease the benefit of spreading out for the prey. The outcomes of interference cannot be foreseen based only on predator density and general behavior, as interference has a different effect when searching under a more random prey spatial pattern. Interference is influenced by the spatial pattern of prey, which may induce interference under strong prey aggregation (Vahl et al. 2007; Hines et al. 2009). Our results support several studies, emphasizing the importance of interference among foragers and its consequences on functional responses (e.g., Schenk et al. 2005).
Searching using an inflexible behavioral tactic without switching to ARS after an encounter with prey is an unsuccessful tactic when prey is clumped (e.g., Nolet and Mooij 2002; Scharf et al. 2009). Spreading out is also an unsuccessful prey strategy against predators characterized by inflexible search tactic especially under high predator densities, and it prevents the invasion of the spreading out strategy under these conditions. Predators in this case hardly find the few large patches of prey, and when they finally find them, they go briefly through them, and continue searching in less dense areas. This reduced search time within dense patches and increased search time outside patches makes spreading out an ineffective strategy. Isolated prey did somewhat better under a more random prey distribution. When predators use the flexible search tactic, the effect of social interactions among predators is larger than in the inflexible search tactic. The reason is probably the concentration of predators in patches triggered by shifting to ARS. Predators have then better chances to keep interacting inside patches.
When prey is clumped, a deviant predator using the flexible search tactic (i.e., shifting to ARS) did better than predators using an inflexible search tactic, while a deviant predator using the inflexible search tactic did worse than the others switching to ARS after prey detection (Figs. 4a, 5a). It suggests that an inflexible predator is unlikely to invade a population of flexible predators when prey is clumped. Both those patterns leveled off with increasing density, due to prey exploitation and increasing frequency of interactions. It has two consequences on predator populations. First, the more efficient search tactic (i.e., shifting to ARS under clumped patterns) can more easily invade a population in either lower predator densities or when exploitation is not too strong. Second, the disadvantage of inferior phenotypes is moderated in high densities or when exploitation is strong, making it more difficult for natural selection to decrease their frequency or eliminate them from the population.
Simulation models are unrealistic and present a simplification of nature. They can only provide general predictions, and modifications are required when calibrating the model to natural systems (Schmitz 2001). Furthermore, results may change to some extent while changing parameter values or the order of events (Ruxton 1996). Some of the simplifying assumptions here are homogeneity of the landscape except for the predator and prey locations, constant behaviour of predators during the entire simulation (e.g., they do not satiate), no handling time, no renewal of prey, immobility of prey and ignoring other trophic levels, such as the response of the predators in the simulation to their own predators and response of the prey to its food resources.
The model presented is general and simple, and can be easily calibrated to fit natural systems, in which prey is hidden, the predator is much more active than the prey and consumes more than one prey item. Examples may be coastal birds searching for hidden invertebrate prey below the ground (e.g., Vahl et al. 2007), small rodents searching for seeds buried under the sand (e.g., Rosenzweig and Abramsky 1997) or ladybird beetles searching for aphids on leaves (e.g., Nakamuta 1985). Future theoretical directions may include a design of a dynamic game between predators and prey. The present analysis deals with cases where either prey or predators evolve much faster than the other ‘player’ (i.e., only one of the two is free to evolve). It is more realistic to let both evolve simultaneously, perhaps in a framework of genetic algorithm, and look for correlations between predator and prey behavior. In addition, relaxing some of the simplifying assumptions would be insightful, such as allowing for predator satiation, prey renewal and handling time. Changing these parameters will determine if the model can be even more general and fit to a larger number of natural systems.
References
Apaloo J (1997) Revisiting strategic models of evolution: the concept of neighborhood invader strategies. Theor Popul Biol 52:71–77
Barnard CJ, Sibly RM (1981) Producers and scroungers: a general model and its application to captive flocks of house sparrows. Anim Behav 29:543–550
Bednekoff PA, Lima SL (1998) Randomness, chaos and confusion in the study of antipredator vigilance. Trends Ecol Evol 13:284–287
Benhamou S (1992) Efficiency of area-concentrated searching behavior in a continuous patchy environment. J Theor Biol 159:67–81
Brockmann HJ (2001) The evolution of alternative strategies and tactics. Adv Stud Behav 30:1–51
Connell SD (2000) Is there safety-in-numbers for prey? Oikos 88:527–532
Farwell M, McLaughlin RL (2009) Alternative foraging tactics and risk taking in brook charr (Salvelinus fontinalis). Behav Ecol 20:913–921
Fitzpatrick BM, Shook K, Izally R (2009) Frequency-dependent selection by wild birds promotes polymorphism in model salamanders. BMC Ecol 9:12
Giraldeau L-A, Valone TJ, Templeton JJ (2002) Potential disadvantages of using socially acquired information. Philos T R Soc B 357:1559–1566
Grimm V, Railsback SF (2006) Individual-based modeling and ecology. Princeton University Press, Princeton
Gross MR (1996) Alternative reproductive strategies and tactics: diversity within sexes. Trends Ecol Evol 11:92–98
Hamblin S, Mathot KJ, Morand-Ferron J, Nocera JJ, Rieucau G, Giraledau L-A (2010) Predator inadvertent social information use favours reduced clumping of its prey. Oikos 119:286–291
Hamilton WD (1971) Geometry for the selfish herd. J Theor Biol 31:295–311
Hancock PA, Milner-Gulland EJ, Keeling MJ (2006) Modelling the many-wrongs principle: the navigational advantages of aggregation in nomadic foragers. J Theor Biol 240:302–310
Hines AH, Long WC, Terwin JR, Thrush SF (2009) Facilitation, interference, and scale: the spatial distribution of prey patches affects predation rates in an estuarine benthic community. Mar Ecol Prog Ser 385:127–135
Ioannou CC, Krause J (2008) Searching for prey: the effect of group size and number. Anim Behav 75:1383–1388
Johnson CA, Giraldeau L-A, Grant JWA (2006) Intensity of interference affects the distribution of house sparrows, Passer domesticus, at food patches. Anim Behav 71:965–970
Keddy PA (2001) Competition, 2nd edn. Kluwer, Norwell
Kendal RL, Coolen I, van Bergen Y, Laland KN (2005) Trade-offs in the adaptive use of social and asocial learning. Adv Stud Behav 35:333–379
Kisdi E, Meszéna G (1995) Life histories with lottery competition in a stochastic environment: ESSs which do not prevail. Theor Popul Biol 47:191–211
Krause J, Ruxton GD (2002) Living in groups. Oxford University Press, Oxford
Krebs CJ (1999) Ecological methodology, 2nd edn. Addison-Wesley Educational Publishers, New York
Manly BFJ (1997) Randomization, bootstrap and Monte Carlo methods in biology. Chapman & Hall, London
Maynard Smith J (1989) Evolutionary genetics. Oxford University Press, Oxford
Motro U, Shmida A (1995) Near-far search: an evolutionary stable foraging strategy. J Theor Biol 173:15–22
Nakamuta K (1985) Mechanism of the switchover from extensive to area-concentrated search behaviour of the ladybird beetle, Coccinella septempunctata bruckii. J Insect Physiol 31:849–856
Nemiroff L, Despland E (2007) Consistent individual differences in the foraging behaviour of forest tent caterpillars (Malacosoma disstria). Can J Zool 85:1117–1224
Nolet BA, Mooij WM (2002) Search paths of swans foraging on spatially autocorrelated tubers. J Anim Ecol 71:451–462
Prokopy RJ, Roitberg BD (2001) Joining and avoidance behavior in nonsocial insects. Annu Rev Entomol 45:631–665
Ranta E, Rita H, Lindstrom K (1993) Competition versus cooperation: success of individuals foraging alone and in groups. Am Nat 142:42–58
Rosenzweig ML, Abramsky Z (1997) Two gerbils of the Negev: a long-term investigation of optimal habitat and its consequences. Evol Ecol 11:733–756
Rowland JM, Emlen DJ (2009) Two thresholds, three male forms result in facultative male trimorphism in beetles. Science 323:773–776
Ruxton GD (1996) Effects of the spatial and temporal ordering of events on the behaviour of a simple cellular automaton. Ecol Model 84:311–314
Ruxton GD, Hall SJ, Gurney WSC (1995) Attraction toward feeding conspecifics when food patches are exhaustible. Am Nat 145:653–660
Scharf I, Hollender Y, Subach A, Ovadia O (2008) Effect of spatial pattern and microhabitat on pit construction and relocation in Myrmeleon hyalinus (Neuroptera: Myrmeleontidae) larvae. Ecol Entomol 33:337–445
Scharf I, Kotler B, Ovadia O (2009) Consequences of food distribution for optimal searching behavior: an evolutionary model. Evol Ecol 23:245–259
Schenk D, Bersier LF, Bacher S (2005) An experimental test of the nature of predation: neither prey- nor ratio-dependent. J Anim Ecol 74:86–91
Schmitz OJ (2001) From interesting details to dynamical relevance: toward more effective use of empirical insights in theory construction. Oikos 94:39–50
Sinervo B, Lively CM (1996) The rock-paper-scissors game and the evolution of alternative male strategies. Nature 380:240–243
Taylor J (1976) The advantage of spacing out. J Theor Biol 59:485–490
Tinbergen N, Impekoven M, Franck D (1967) An experiment on spacing-out as a defense against predation. Behaviour 28:307–321
Travis JMJ, Palmer SCF (2005) Spatial processes can determine the relationship between prey encounter rate and prey density. Biol Lett 1:136–138
Vahl WK, Van der Meer J, Meijer K, Piersma T, Weissing FJ (2007) Interference competition, the spatial distribution of food and free-living foragers. Anim Behav 74:1493–1503
Acknowledgments
We would like to thank Wolf Mooij for his helpful comments on a previous version of the manuscript. I.S. was supported by the Minerva Post-Doctoral Fellowship.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article
Cite this article
Scharf, I., Ovadia, O. & Foitzik, S. The advantage of alternative tactics of prey and predators depends on the spatial pattern of prey and social interactions among predators. Popul Ecol 54, 187–196 (2012). https://doi.org/10.1007/s10144-011-0286-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10144-011-0286-1