
Abstract
Optimal foraging theory predicts that diving predators should maximise their energy intake while minimizing the costs of their foraging activities at depth. This hypothesis was tested in two breath-hold divers that foraged in the pelagic waters off Kerguelen Island, southern Indian Ocean. Macaroni penguins (Eudyptes chrysolophus) feed predominately on crustaceans at moderate depths (ca. 50 m), while king penguins (Aptenodytes patagonicus) feed on mesopelagic fish at deep depths (ca. 100–150 m). We instrumented 22 penguins with time-depth recorders during the breeding season of the 2014 southern summer, just before they went to sea. Birds were recaptured after one to five foraging trips and the dive data were analysed on the level of single dive cycles and entire dive bouts. Both species adjusted their diving behaviour and modulated their foraging activity in accordance with their experience in their previous dives. Foraging activity during a dive (in terms of number of wiggles per dive) was greater if birds targeted the same depth as the previous dive. The penguins spent less time at the surface between two prey capture attempt dives than when a prey capture attempt dive was preceded by a non-prey capture attempt dive. Dive bout analyses showed that foraging activity increased with bout duration, while transit time during dives decreased with bout duration. Our findings are in general agreement with predictions based on optimal foraging models. The results suggest that penguins anticipated the depth of their next dive based on their encounter of a prey patch in the previous dive and optimized their chances of feeding success by spending minimal time at the surface and in transit to the patch depth. Once penguins detected a prey patch, these behavioural adjustments allowed them to rapidly return to that patch, increasing their chances of feeding again before the prey disperses.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Resources are patchily distributed in the oceanic environment due to the spatial variation of physical processes (Saunders et al. 2013). As a result, marine predators need to adjust their search patterns to overcome prey variation in space and time in the heterogeneous environment (Wakefield et al. 2009; Weimerskirch 2007; Wilson 2010; Benoit-Bird et al. 2013). Marine predators exhibit flexible foraging behaviour in relation to prey distribution and availability on both large and fine scales. Foraging behaviour adjustments are particularly important for seabirds during the breeding season when the animals are constrained by the need to commute frequently between their foraging grounds and their colony. The foraging range of flightless avian divers, like penguins, is further restricted in comparison to that flying seabirds that can travel greater distances at a lower energetic cost in search of prey (Weimerskirch 2007).
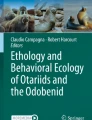
Penguins dive to moderate or deep depths for extended periods in search of prey. Penguins typically perform repeated dives, called dive bouts, which indicate intense foraging activity (Harcourt et al. 2002; Ropert-Coudert et al. 2004; Weimerskirch et al. 2012). A single foraging dive consists of a descent phase, active foraging time near the greatest depth of the dive, an ascent to the surface, and a post-dive surface interval during which the diver recovers from the dive and prepares for the next one (Kramer 1988; Wilson 1995; Halsey et al. 2007). The times allocated to the dive and the recovery phases are constrained by the physiological limits of the individual (Boyd 1997; Butler and Jones 1997; Ponganis et al. 1999; Butler 2001) and the immediate balancing of the time budget should result in instantaneous foraging feedback.
Optimal foraging models predict that diving predators optimize their energetic efficiency by maximising the time spent at the most profitable depth and spending as little time possible in transit and at the surface (Houston and Carbone 1992; Thompson and Fedak 2001; Mori et al. 2002). Penguins feed mostly during the bottom phase of a dive (Wilson and Wilson 1995; Ropert-Coudert et al. 2006), sometimes during the ascent phase and very rarely during the descent phase (Charrassin and Bost 2001; Bost et al. 2007).
Some studies have supported that penguins adjust their surface time between dives in anticipation of the diving effort of the next dive and targeting the depth of the previous dive (Sato et al. 2002; Wilson 2003; Hanuise et al. 2013). Hanuise et al. (2013)—in their study of the relationship between transit time to the targeted depth and foraging success in king penguins, Aptenodytes patagonicus (Miller 1778)—showed that vertical speed is faster when foraging activity is greater.
In this study, we investigated the behavioural adjustments of two penguin species on Kerguelen Island—king penguins, A. patagonicus and macaroni penguins, Eudyptes chrysolophus (Brandt 1937) during individual dives and diving bouts in relation to the foraging effort of the preceding dive. We did this by measuring and comparing dive parameters, including vertical descent and ascent speeds and time spent at the surface, over the course of a diving bout. We addressed two central questions: (i) How do these two species of penguins adjust their foraging behaviour and surface time in relation to their recent diving experience? (ii) How do they modulate their time budgets between surface, transit and bottom phases in relation to the size of the dive bouts?
We predicted that (i) penguins would modify their diving behaviour, at the single-dive scale, according to the foraging success of the preceding dive, and that (ii) foraging effort would increase after the first dive in which prey was encountered, at the scale of dive bouts. When penguins targeted the same depth as the preceding dive where a prey capture attempt was made, penguins are likely to increase the probability of finding and capturing prey again. During these dives, birds will likely reduce transit time to the targeted depth.
King and macaroni penguins, both feed on patchily distributed prey and in the same region around Kerguelen but they differ in their target species (Duhamel et al. 2000; Bocher et al. 2001; Collins et al. 2008), their diving capacities and recovery times (Charrassin et al. 2002; Green et al. 2003). While king penguins feed exclusively on fish during the breeding season, macaroni penguins consume a mixed diet, consisting of fish and crustaceans (Guinet et al. 1996; Bost et al. 2002; Cherel et al. 2007). Comparing two different species can reveal a general foraging strategy or underline differences in foraging strategies.
Material and methods
Site and study species
The study was carried out on Kerguelen Island (southern Indian Ocean, 48°45–50°00S; 68°45–70°58E) during the austral summer 2013/2014. King penguins breed on the eastern coast of the Courbet peninsula (Ratmanoff colony: 120,000 pairs) and macaroni penguins breed at the northern tip of the same peninsula (Cap Cotter colony: 400,000 pairs). The diving behaviour of the two species was studied at sea. The king penguins were instrumented with Mk9-Time-Depth-Recorders (TDR; Wildlife computers, Redmond, WA, USA; size: 68 × 17 × 17 mm, weight: 30 g). Macaroni penguins were instrumented with LAT 1800 depth recorders (LOTEK, Newmarket, Ontario, Canada, size: 11 × 38 × 13 mm; weight: 7.6 g). A depth resolution of 0.5 m was recorded with an accuracy of ± 1% in both species and depth was recorded every second. We used Loctite glue to attach the instruments to the lower back (midline) of the penguins to limit hydrodynamic drag (Bannasch et al. 1994). We tracked 22 penguins during their foraging trips off the east coast of Kerguelen Island: 7 king penguins and 15 macaroni penguins. All penguins were recaptured after one to five foraging trips (mean trip duration: 8.5 ± 1.5 days for king penguins; 5.2 ± 0.4 days for macaroni penguins).
Dive analysis
Data from all devices were extracted and analysed with MultiTrace software (Jensen Software Systems, Laboe, Germany). In accordance with the resolution/accuracy of the TDR’s, only dives exceeding 3 m were used in the analysis as dives < 3 m depth could not be clearly distinguished from the movement of penguins subjected to swells. Dives exceeding 50 m were considered foraging dives for king penguins (Charrassin et al. 2002) and dives exceeding 10 m for macaroni penguins (Green 2003).
For each dive included in the analysis, we calculated the following parameters using MultiTrace software: maximum dive depth; descent and ascent rate; number of wiggles during a dive; time spent at the surface preceding the ensuing dive; and time spent at depth during the bottom phase of a dive. Descent and ascent times were defined as the time spent between the surface and the bottom and between the bottom and the surface, respectively. Wiggles were defined as vertical undulation with a minimum amplitude of 2 m and were used as indicators of prey capture attempts (Bost et al. 2007), i.e. the predators encountered and pursued potential prey. Although wiggles do not provide evidence of actual captures, the presence of wiggles is a good indicator of prey encounters (Bost et al. 2007; Carroll et al. 2014). Hence, a dive that included wiggles was classified as a prey capture attempt dive (PCA dive), and if no wiggles occurred, the dive was classified as a non-prey capture attempt dive (non-PCA dive). Foraging activity was associated with the number of wiggles per dive: a greater number of wiggles during a dive indicated a more intense foraging activity (Bost et al. 2007; Carroll et al. 2014). The bottom phase was defined as the time spent at a depth exceeding 90% of the maximum depth reached during a dive (Bost et al. 2007).
Diving behaviour was analysed in relation to the depth of the preceding dive. Dives in which birds targeted the same depth zone consecutively were classified as intra-depth zone dives (IDZ dives) (Tremblay and Cherel 2000). The initial definition of IDZ dives was used for benthic divers which target the same depth. However, macaroni penguins regularly dive to depths of 50 m and king penguins to 100 m. Based on these dive depths, we used fixed intra-depth zones (IDZ) of 10 m for king penguins and 5 m for macaroni penguins (10% of the typical dive depth of each species), to compare the maximum depth reached to that of the preceding dive.
King and macaroni penguins perform the majority of their dives in “dive bouts”. We considered a PCA bout to be a minimum of two successive PCA dives. The end of a PCA bout was defined by two criteria: (i) the next dive was a dive without wiggles and (ii) the interval between the last PCA dive and the next one exceeded 15 min (Halsey et al. 2007).
Statistical analysis
All statistical analyses were conducted in R (version 3.5.3, R Foundation for Statistical, Vienna, Austria). Statistical tests were considered significant when P < 0.05 and results are presented as means ± s.e.m.
Single dives
To determine how penguins adjusted their foraging behaviour on a single dive scale—addressing our first central question—we analysed their diving and foraging behaviour in relation to their behaviour during previous dives. We used a mixed model (binomial distribution) to compare the number of wiggles per dive in relation to the two dive categories, i.e. IDZ (dives of the same depth) and non-IDZ dives (dives of differing depths), with penguin individuals and diving depth as random effects. We used a proportion test to determine if a PCA dive was likely to be followed by another PCA dive and vice versa. Post-dive surface interval durations were related to (i) foraging behaviour (PCA dive or non-PCA dive) and (ii) diving behaviour (IDZ dive or non-IDZ dive) using mixed models with individuals as random effect. Surface times were log transformed to fit a normal distribution.
Diving bouts
To determine how penguins modulated their behaviour in relation to the number of dives in a PCA bout, we analysed the variations in dive parameters (i.e. mean number of wiggles per dive, mean descent and ascent rates and mean surface time) using mixed models according to the number of dives per PCA bout, with penguin individuals as random effect. The number of wiggles per dive and surface time were log transformed to fit a normal distribution.
We also studied the number of dives in a PCA bout by comparing the observed occurrence of a PCA dive during a dive bout with the theoretical occurrence probability of a PCA dive. The observed occurrence of successive PCA dives in a bout of n-dives was calculated as follows:
In theory, two possible outcomes exist for a dive within a bout: the bird attempted to capture prey (PCA dive) or it did not (non-PCA dive). Thus, each dive has 50% chance of being a PCA dive or a non-PCA dive. A PCA bout (including only PCA dives) of n-dives, therefore, has an occurrence probability of 1/2n. The likelihood of having successive PCA dives within a bout, therefore, decays exponentially along the bout.
The proportion of PCA bouts performed by each species was compared with the theoretical ones and between species, using proportion tests. The number of dives performed during PCA bouts were compared between species using a mixed model for negative binomial distribution, with individual as random effect.
Results
Dive parameters
The 22 king and macaroni penguins we tracked conducted a total of 57,080 dives, consisting of both shallow and deep dives (Table 1). For both species, PCA dives made up the main part of the deep dives (king penguins: 80.8%; and macaroni penguins: 70.4%).
Single dives: the effect of the preceding dive on dive depth and foraging activity
The number of wiggles per dive varied across the maximal dive depths and also between dive categories (IDZ dives versus non-IDZ dives) for both species (Fig. 1). Foraging activity during IDZ dives was significantly higher than during non-IDZ dives for both macaroni penguins (mixed model, z value = 21.7, P < 2e−16) and king penguins (mixed model, z value = 93.5, P < 2e−16). The number of wiggles per dive was higher for both species during dives when birds targeted the same depth zone as during the preceding dive (Fig. 1).

Number of wiggles according to maximal dive depth (10 m bins) for macaroni penguins (n = 28,946 dives) and king penguins (n = 15,393 dives). IDZ dives and non-IDZ dives are shown in black and grey, respectively. Stars represent significant differences between IDZ dives and non-IDZ dives
The PCA dives that were preceded by PCA dives occurred mainly during deep dives (96.6% for macaroni penguins and 97.1% for king penguins). The majority of PCA dives conducted by both species were IDZ dives (75.9% for macaroni penguins and 67.1% for king penguins) (Fig. 2).

Maximal dive depth distributions of the current dive within two successive PCA dives for macaroni penguins (a) and king penguins (b). IDZ dives are dives where two dives targeted the same depth zone (defined as 5 m for macaroni penguins and 10 m for king penguins). IDZ dives are shown in black and non-IDZ dive sequences are shown in grey. Dive numbers are indicated for each category. Note that depth scales differed between species
A PCA dive was more likely to be followed by another PCA dive than by a non-PCA dive (80.9% for macaroni penguins and 80.7% for king penguins).
Single dives: the effect of the preceding dive on post-dive surface time
Surface times between dives differed for macaroni and king penguins, regardless of whether the previous dive was a PCA dive or not. Surface intervals were longer on average in king penguins than in macaroni penguins (linear mixed model, df = 20.6, t value = − 7.4, P = 4.96e−7). For both species, the surface time was shorter between two PCA dives than when a PCA dive was preceded by a non-PCA dive (linear mixed models, df = 1.8e4, t value = − 6.0, P = 2.27e−9, for macaroni penguins; df = 8.3e3, t value = 10.4, P < 2e−16 for king penguins). Surface times were shorter between two PCA dives for IDZ dives than for non-IDZ dives (linear mixed models: df = 1.5e4, t value = − 10.5, P < 2e−16 for macaroni penguins; df = 6.9e4, t value = − 1.8, P = 0.0691 for king penguins).
Dive bouts: the effect of foraging intensity
For both species, the observed occurrence of a PCA bout of n-dives was consistently higher than the computed theoretical occurrence probability, throughout the observed range of dives within a bout (Fig. 3). The theoretical occurrence probability rapidly decreased as the number of dives in a PCA bout increased. The observed occurrences of PCA bouts differed between species only for bouts with less than five dives, but for bouts of five dives or more, the observed occurrence were the same in macaroni and king penguins (Fig. 3) (Fisher test, P > 0.05). Short PCA bouts (number of PCA dives ≤ 4) constituted a greater proportion in macaroni penguins, when compared with king penguins (Fisher test, P < 0.05).

Time spent at the surface between two dives when PCA occurred (wiggles) or not (no wiggles). Only deep dives, exceeding 10 m for macaroni penguins (left, n = 18,847) and exceeding 50 m for king penguins (right, n = 8855), were included. The grey and black bars show results for non-IDZ dives (dives not targeting the same depth zone) and IDZ dives (dives targeting the same depth zone), respectively. White symbols indicate significant differences between IDZ and non-IDZ dive sequences within each dive type (linear mixed models). Black symbols indicate significant differences between dive types for non-IDZ dive sequences (linear mixed models). Values are means + standard error (s.e.m)
Overall, the number of dives per PCA bout was similar for macaroni penguins (7.9 ± 0.3 PCA dives, n = 8065) and king penguins (9.0 ± 0.5 PCA dives, n = 17,429; linear mixed model, z value = − 1.1, P = 0.275). Dive parameters changed depending on the number of dives in PCA bouts (Fig. 4). The number of wiggles per dive increased significantly with the size of a sequence (Table 2; Fig. 4a,b). Overall, the number of wiggles per dive were similar for king and macaroni penguins (linear mixed model, df = 19.9, t value = − 0.5, P = 0.61).
Transit times during descent and ascent phases were shorter when PCA bouts were longer (Table 2). The mean ascent rate increased significantly with the duration of a PCA bout (Fig. 4c, d). Similarly, the mean descent rate increased significantly with the number of dives per PCA bout (Fig. 4e,f). The transit speeds (descent/ascent rates) of king penguins during PCA bouts were higher than those of macaroni penguins (linear mixed model, df = 19.9, t value = − 6.7, P = 1.55e−6 for ascent rate; df = 19.9, t value = − 3.6, P = 0.00 for descent rate). Lastly, surface time between dives in a PCA bout varied with bout length; however, the differences were only slightly significant in macaroni penguins, where post-dive surface intervals were shorter when the number of dives per bout was greater (Table 2; Fig. 4g,h).
Discussion
Foraging theory predicts that diving animals should maximise their time spent in a prey patch and minimize the time spent in transit between the surface and the prey patch and in recovery between dives at the surface (Kramer 1988; Mori 1998). Until now, only a few studies have shown that avian divers modulate their foraging behaviour in response to the conditions encountered during the preceding dive (Wilson 2003; Hanuise et al. 2013). Our study shows that penguins adjusted their dive parameters at the scale of a dive as well as at the scale of a PCA bout. At the scale of PCA bouts, birds modulated their descent/ascent rate and post-dive surface interval duration in accordance with the duration and the success of PCA bouts. Only Hanuise et al (2013) has demonstrated such anticipation of foraging behaviour in penguins. These findings are discussed below in relation to the predictions of theoretical foraging models and the foraging requirements of diving predators in general.

The theoretical occurrence probability of PCA bouts with n-dives (PCA dives), shown in red compared to the observed occurrence of PCA bouts in king penguins (black solid line) and macaroni penguins (black dotted line)
Adjustment of foraging activity: single dives
The level of foraging activity in penguins—as indicated by the number of wiggles per dive—was greater when penguins targeted the same depth zone (IDZ dives), especially in deeper dives (Fig. 1). Furthermore, penguins adjusted their diving depth in accordance with the foraging activity of the previous dive (Fig. 2). Once penguins discovered a likely profitable patch, they maintained their diving depth range. This behaviour presumably reflects an attempt to take advantage of the patch before its dispersion. After a primary encounter with a patch, penguins likely anticipate the prey distribution and depth in the following dives (Figs. 2 and 5). Returning to the same depth for the same activity (PCA or not) between two successive dives could be associated with foraging site fidelity behaviour at depth for PCA dives. Little penguins, Eudyptula minor, for example, exhibit spatial foraging fidelity when resource availability is high, but switch to other foraging sites when it is low, supporting the concept of behavioural adjustment according to prey availability (Carroll et al. 2018). In a heterogeneous environment, the resource is patchily distributed (Hunt 1990) and, therefore, prey distribution at a fine scale may be unpredictable for diving birds. Returning to the same depth after a PCA dive, presumably to the same prey patch, eliminates the search phase and, therefore, increases the rate of energy gain.
Adjustment of foraging activity: PCA bouts
Repeated dives within a bout are associated with an intense foraging period in several diving predators (Boyd 1996; Harcourt et al. 2002; Mori et al. 2002). In this study, the proportion of PCA bouts performed by both species was greater than if bouts were randomly performed, no matter the length of the bout. Longer PCA bouts were associated with a higher number of wiggles per dive, suggesting a better patch quality, i.e. patch richness or patch size (Fig. 4). Hence, the number of successive PCA dives could be an indicator of patch richness and profitability. As breath-hold divers, penguins need to return to the surface to breathe, limiting the amount of time they can spend within a profitable prey patch. They might take advantage of a high-quality patch by returning to the patch until the rate of energy gain decreases (Mori 1998). Energy gain should outweigh energy expenditure during a dive for the penguin to exploit the same profitable patch again. Some extrinsic or intrinsic factors may also affect the decision to terminate a PCA bout, e.g. physiological constraints, satiation, deterioration of light conditions at-depth, and patch dispersion, but the depletion of resources within a patch is a crucial factor in the decision-making process of leaving the patch. A cerebral area (‘dACC’) was recently discovered in non-human primates that is linked to the decision-making processes of leaving one food-depleted area in search of another (Hayden et al. 2011). The process involves a neuronal signal that increases with the time spent in a patch, stimulating the decision to depart (Hayden et al. 2011). A similar process may occur in penguins, i.e. as resources are gradually depleted.

Changes of dive parameters across PCA bouts of different lengths. A total of 2168 and 926 PCA bouts were recorded ranging from 2 to 138 (median: 4) and from 2 to 133 successive dives (median: 4) for macaroni penguins and king penguins, respectively. Note that the lengths of PCA bout classes differ between species. Non-significant differences are indicated by “ns” associated with a bar (linear mixed model, P ≥ 0.1), “**” indicates significant differences (linear mixed models, P < 0.05) and “*” indicates slightly significant difference (linear mixed models, 0.05 < P < 0.1)
Adjustment of surface times: single dives
The energy intake of divers during the transit phase (descent/ascent) and the recovery phase at the surface is generally limited since most of the feeding occurs in the bottom phase. Accordingly, Kramer (1988) suggested that breath-hold divers should balance their oxygen consumption during a dive with the oxygen uptake during the post-dive surface interval. In our study, penguins spent less time at surface when a PCA dive was preceded by a PCA dive than a non-PCA dive, especially when dives targeted the same depth (IDZ dives) (Fig. 5). According to Halsey et al. (2007b), an increase in foraging activity at depth is not always associated with an increase in heart rate or oxygen uptake at the surface. Surface pauses were originally considered to only serve as recovery from the preceding dive (“reactive breathing”) (Le Boeuf et al. 2000), but are now also believed to enable preparation for the ensuing dive (“anticipatory breathing”) (Walton et al. 1998; Wilson 2003; Elliott et al. 2008). This has been observed in several diving animals (Glen et al. 2001). Diving birds may adjust their surface time to attain just enough air to reach the targeted depth of the ensuing dive (Sato et al. 2002; Wilson 2003; Wilson and Quintana 2004) (e.g. Brünnich’s guillemots, Uria lomvia Elliott et al. 2008,). The time spent at the surface to prepare for the next dive seems to be open to adjustment if the animal gains knowledge relevant to the foraging situation, such as prey patch depth and anticipated foraging effort. A decrease in the time spent at the surface between dives of king and macaroni penguins (Fig. 5), following a dive with a high foraging effort suggests a behavioural response aimed at increasing energy gain per unit foraging time to make efficient use of a prey patch (Stephens and Krebs 1986).
Adjustment of surface times: PCA bouts
Surface times were slightly negatively correlated with the size of PCA bouts, i.e. penguins spent less time at the surface in between dives during long PCA bouts (Fig. 4). Longer PCA bouts were associated with a higher foraging effort (number of wiggles per dive), which induced greater energy expenditure at depth. The reduction of surface time in addition to the increase of foraging effort over a long period could result in harmful effects (Butler 2004); however, diving predators may postpone their complete physiological recovery from dives until the end of the bout (Cornick et al. 2006; Fahlman et al. 2008), allowing them to reduce their surface time and maximise their feeding time when a profitable patch is encountered. The abdominal and stomach temperatures of king penguins have been shown to decrease during long bout (Handrich et al. 1997). A reduction in body temperature could reduce the metabolic rate and the oxygen demands during diving bouts (Butler 2004). Both behavioural and physiological adjustments, therefore, contribute to optimization of foraging in penguins.
Adjustment of transit times: PCA bouts
In diving predators, descent and ascent phases correspond to vertical and horizontal displacement (Wilson 2003). The penguins tracked in this study reduced their time spent in descent and ascent phases (i.e. increased their speed of travel) during dives exhibiting a high number of wiggles, indicating active foraging during PCA bouts (Fig. 4). The minimization of travel time when patch quality is high has been observed in other diving predators (Sato 2004; Thums et al. 2013). If diving predators encounter prey they can shorten their transit time, maximising the time spent in the patch and the number of capture attempts, thereby increasing the energy expenditure during the bottom phase while decreasing expenditure in the transit phases. Transit phases can be reduced by adjusting body angle or swim speed, both of which increase the energy expenditure and, therefore, reduce aerobic dive duration. Reducing transit time, therefore, does come at some cost to the time spent at depth, but allows the animals the greatest chance of spending time foraging while the prey are still there. Carroll et al. (2014) found that descent rate did not significantly influence foraging success of little penguins at the single dive scale. At the bout scale, we found that transit time was negatively correlated with the number of dives conducted within a PCA bout and level of foraging activity (Fig. 4). Thus, king and macaroni penguins likely adjust their descent rate in response to the size or density of the prey patch previously encountered, and modulate their ascent rate in accordance with the foraging activity or bottom time of the current dive (see Hanuise et al. 2013). The adjustment of descent rate might be, therefore, an anticipatory reaction, while ascent rate adjustment is reactive (Hanuise et al. 2013). The reduction in surface time despite increased energy expenditure during transit suggests that birds prioritize prey capture over complete physiological recovery when they have encountered a profitable prey patch. It seems that they postpone complete physiological recovery until patch profitability declines, they reach their physiological limits or become full, ending the dive bout (Ydenberg and Forbes 1988).
Interspecies differences
Differences in prey behaviour affect the foraging strategy of macaroni and king penguins during PCA bouts. Our study shows that both macaroni and king penguins each follow a distinct diving strategy. We found little overlap in the targeted depth range of birds, since macaroni penguins typically forage at medium depth, while king penguins target prey at a greater depth. Foraging depth is related to the depth distribution of the targeted prey and to the physiological capacities of the species (Froget et al. 2004; Green et al. 2003). Crustaceans are typically found at shallower depths than myctophids. Myctophids are found in mesopelagic waters (Duhamel et al. 2000; Collins et al. 2008) and are typically concentrated at depths between 50 and 150 m during daylight (e.g. for K. anderssoni). Themisto gaudichaudii and Euphausia vallentini, the main crustacean components of a macaroni penguin’s diet, often occur at great densities and biomass and are very mobile (Bost et al. 1994; Bocher et al. 2001). These crustacean aggregations are, therefore, more susceptible to dispersion than myctophids (Collins et al. 2008) and may constrain the duration of PCA bouts in macaroni penguins. Mesopelagic fish patches are relatively stable, even in the presence of external disturbances (Kaartvedt et al. 2012). Hence, the lethargic behaviour of myctophids (Catul et al. 2011) would enable breath-hold divers, like king penguins to successfully target the same prey patch repeatedly, especially during a PCA bout.
Size also affects foraging behaviour, due to differences in physiological capacities related to body mass. A number of studies have linked penguins’ body mass to dive performance (Watanuki and Burger 1999; Ponganis and Kooyman 2000; Halsey et al. 2006). In general, larger species are able to dive longer and deeper because oxygen stores scale isometrically with body mass, while oxygen consumption during diving scales allometrically with an exponent < 1 (Kooyman 1989; Halsey et al. 2006). Hence, the aerobic diving capacity of larger/heavier king penguins is considerably greater than that of the smaller macaroni penguins (cADL: calculated aerobic dive limits = ~ 242 s for king penguins and ~ 130 s for macaroni penguins) (Culik et al. 1996; Green 2003). These differences in physiological capacity lead to differences in foraging strategies. However, while the physiological constraints of macaroni and king penguins are different, we found that their diving adjustments were similar. Both species reduced their transit times during dives with greater foraging activity and changes in both of these parameters intensified as PCA bout length increased (Fig. 4). Thus, the behavioural adjustments were similar in both species, and might be similar also in other breath-hold divers.
Conclusions
Macaroni and king penguins adjusted their foraging behaviour once they encountered a profitable prey patch. In accordance with optimal foraging theory, the penguins reduced their surface recovery time once they encountered a prey patch and then targeted the same depth during ensuing dives. The adjustment of transit time during a PCA bout seemed to be linked to the patch quality. These adjustments of surface and transit times may remain stable until foraging costs exceed the potential energetic gain or the need or ability to continue feeding. Further work combining the use of high frequency heart rate recorders, accelerometers and video-borne deployments should provide new insights on how physiological constraints shape optimal foraging behaviour in breath-hold divers such as penguins.
Data availability
The datasets used for this study are available from the corresponding author on reasonable request.
References
Bannasch R, Wilson R, Culik B (1994) Hydrodynamic aspects of design and attachment of a back-mounted device in penguins. J Exp Biol 194:83
Benoit-Bird KJ, Battaile BC, Heppell SA, Hoover B, Irons D, Jones N, Kuletz KJ, Nordstrom CA, Paredes R, Suryan RM, Waluk CM, Trites AW (2013) Prey patch patterns predict habitat use by top marine predators with diverse foraging strategies. PLoS ONE 8:e53348. https://doi.org/10.1371/journal.pone.0053348
Bocher P, Cherel Y, Labat J-P, Mayzaud P, Razouls S, Jouventin P (2001) Amphipod-based food web: Themisto gaudichaudii caught in nets and by seabirds in Kerguelen waters, southern Indian Ocean. Mar Ecol Prog Ser 223:261–276
Bost CA, Koubbi P, Genevois F, Ruchon L, Ridoux V (1994) Gentoo penguin Pygoscelis papua diet as an indicator of planktonic availability in the Kerguelen Islands. Polar Biol 14:147–153
Bost CA, Zorn T, Le Maho Y, Duhamel G (2002) Feeding of diving predators and diel vertical migration of prey: king penguins’ diet versus trawl sampling at Kerguelen Islands. Mar Ecol Prog Ser 227:51–61
Bost CA, Handrich Y, Butler PJ, Fahlman A, Halsey LG, Woakes AJ, Ropert-Coudert Y (2007) Changes in dive profiles as an indicator of feeding success in king and Adélie penguins. Deep Sea Res Part II Top Stud Oceanogr 54:248–255. https://doi.org/10.1016/j.dsr2.2006.11.007
Boyd IL (1996) Temporal scales of foraging in a marine predator. Ecology 77:426–434
Boyd IL (1997) The behavioural and physiological ecology of diving. TREE 12:213–217
Butler PJ (2001) Diving beyond the limits. Physiology 16:222–227
Butler PJ (2004) Metabolic regulation in diving birds and mammals. Respir Physiol Neurobiol 141:297–315
Butler PJ, Jones DR (1997) Physiology of diving of birds and mammals. Physiol Rev 77:837–898
Carroll G, Slip D, Jonsen I, Harcourt R (2014) Supervised accelerometry analysis can identify prey capture by penguins at sea. J Exp Biol 217:4295–4302. https://doi.org/10.1242/jeb.113076
Carroll G, Harcourt R, Pitcher BJ, Slip D, Jonsen I (2018) Recent prey capture experience and dynamic habitat quality mediate short-term foraging site fidelity in a seabird. Proc R Soc B Biol Sci 285:20180788. https://doi.org/10.1098/rspb.2018.0788
Catul V, Gauns M, Karuppasamy PK (2011) A review on mesopelagic fishes belonging to family Myctophidae. Rev Fish Biol Fish 21:339–354. https://doi.org/10.1007/s11160-010-9176-4
Charrassin JB, Bost C-A (2001) Utilisation of the oceanic habitat by king penguins over the annual cycle. Mar Ecol Prog Ser 221:285–298
Charrassin JB, Maho YL, Bost C-A (2002) Seasonal changes in the diving parameters of king penguins (Aptenodytes patagonicus). Mar Biol 141:581–589. https://doi.org/10.1007/s00227-002-0843-4
Cherel Y, Hobson KA, Guinet C, Vanpe C (2007) Stable isotopes document seasonal changes in trophic niches and winter foraging individual specialization in diving predators from the Southern Ocean. J Anim Ecol 76:826–836. https://doi.org/10.1111/j.1365-2656.2007.01238.x
Collins MA, Xavier JC, Johnston NM, North AW, Enderlein P, Tarling GA, Waluda CM, Hawker EJ, Cunningham NJ (2008) Patterns in the distribution of myctophid fish in the northern Scotia Sea ecosystem. Polar Biol 31:837–851. https://doi.org/10.1007/s00300-008-0423-2
Cornick LA, Inglis SD, Willis K, Horning M (2006) Effects of increased swimming costs on foraging behavior and efficiency of captive Steller sea lions: evidence for behavioral plasticity in the recovery phase of dives. J Exp Mar Biol Ecol 333:306–314
Culik BM, Pütz K, Wilson RP, Allers D, Lage J, Bost CA, Le Maho Y (1996) Diving energetics in king penguins (Aptenodytes patagonicus). J Exp Biol 199:973–983
Duhamel G, Koubbi P, Ravier C (2000) Day and night mesopelagic fish assemblages off the Kerguelen Islands (Southern Ocean). Polar Biol 23:106–112
Elliott KH, Davoren GK, Gaston AJ (2008) Increasing energy expenditure for a deep-diving bird alters time allocation during the dive cycle. Anim Behav 75:1311–1317. https://doi.org/10.1016/j.anbehav.2007.10.026
Fahlman A, Svärd C, Rosen DA, Jones DR, Trites AW (2008) Metabolic costs of foraging and the management of O2 and CO2 stores in Steller sea lions. J Exp Biol 211:3573–3580
Glen F, Broderick AC, Godley BJ, Metcalfe JD, Hays GC (2001) Dive angles for a green turtle (Chelonia mydas). J Mar Biol Assoc U K 81:683–686
Green JA (2003) Energetics of diving in macaroni penguins. J Exp Biol 206:43–57. https://doi.org/10.1242/jeb.00059
Guinet C, Cherel Y, Ridoux V, Jouventin P (1996) Consumption of marine resources by seabirds and seals in Crozet and Kerguelen waters: changes in relation to consumer biomass 1962–85. Antarct Sci 8:23–30
Halsey LG, Butler PJ, Blackburn TM (2006) A phylogenetic analysis of the allometry of diving. Am Nat 167:276–287
Halsey LG, Bost C-A, Handrich Y (2007) A thorough and quantified method for classifying seabird diving behaviour. Polar Biol 30:991–1004. https://doi.org/10.1007/s00300-007-0257-3
Handrich Y, Bevan RM, Charrassin JB, Pütz K, Woakes AJ, Le Maho Y (1997) Hypothermia in foraging king penguins. Nature 388:64–67
Hanuise N, Bost C-A, Handrich Y (2013) Optimization of transit strategies while diving in foraging king penguins: Optimization of transit in diving king penguins. J Zool 290:181–191. https://doi.org/10.1111/jzo.12026
Harcourt RG, Bradshaw CJ, Dickson K, Davis LS (2002) Foraging ecology of a generalist predator, the female New Zealand fur seal. Mar Ecol Prog Ser 227:11–24
Hayden BY, Pearson JM, Platt ML (2011) Neuronal basis of sequential foraging decisions in a patchy environment. Nat Neurosci 14:933–939. https://doi.org/10.1038/nn.2856
Houston AI, Carbone C (1992) The optimal allocation of time during the diving cycle. Behav Ecol 3:255–265
Hunt GL (1990) The pelagic distribution of marine birds in a heterogeneous environment. Polar Res 8:43–54
Kaartvedt S, Staby A, Aksnes D (2012) Efficient trawl avoidance by mesopelagic fishes causes large underestimation of their biomass. Mar Ecol Prog Ser 456:1–6. https://doi.org/10.3354/meps09785
Kooyman GL (1989) Diverse Divers. Springer, Berlin
Kramer DL (1988) The behavioral ecology of air breathing by aquatic animals. Can J Zool 66:89–94
Le Boeuf BJ, Crocker DE, Grayson J, Gedamke J, Webb PM, Blackwell SB, Costa DP (2000) Respiration and heart rate at the surface between dives in northern elephant seals. J Exp Biol 203:3265–3274
Mori Y (1998) The optimal patch use in divers: optimal time budget and the number of dive cycles during bout. J Theor Biol 190:187–199
Mori Y, Takahashi A, Mehlum F, Watanuki Y (2002) An application of optimal diving models to diving behaviour of Brünnich’s guillemots. Anim Behav 64:739–745. https://doi.org/10.1006/anbe.2002.3093
Ponganis PJ, Kooyman GL (2000) Diving physiology of birds: a history of studies on polar species. Comp Biochem Physiol A Mol Integr Physiol 126:143–151
Ponganis PJ, Kooyman GL, Van Dam R, LeMaho Y (1999) Physiological responses of king penguins during simulated diving to 136 m depth. J Exp Biol 202:2819–2822
Ropert-Coudert Y, Grémillet D, Kato A, Ryan PG, Naito Y, Le Maho Y (2004) A fine-scale time budget of Cape gannets provides insights into the foraging strategies of coastal seabirds. Anim Behav 67:985–992. https://doi.org/10.1016/j.anbehav.2003.09.010
Ropert-Coudert Y, Kato A, Wilson RP, Cannell B (2006) Foraging strategies and prey encounter rate of free-ranging Little Penguins. Mar Biol 149:139–148. https://doi.org/10.1007/s00227-005-0188-x
Sato K (2004) Why do macaroni penguins choose shallow body angles that result in longer descent and ascent durations? J Exp Biol 207:4057–4065. https://doi.org/10.1242/jeb.01265
Sato K, Naito Y, Kato A, Niizuma Y, Watanuki Y, Charrassin JB, Bost C-A, Handrich Y, Le Maho Y (2002) Buoyancy and maximal diving depth in penguins. J Exp Biol 205:1189–1197
Saunders RA, Fielding S, Thorpe SE, Tarling GA (2013) School characteristics of mesopelagic fish at South Georgia. Deep Sea Res Part Oceanogr Res Pap 81:62–77. https://doi.org/10.1016/j.dsr.2013.07.007
Stephens DW, Krebs JR (1986) Foraging theory. Princeton University Press, Princeton
Thompson D, Fedak MA (2001) How long should a dive last? A simple model of foraging decisions by breath-hold divers in a patchy environment. Anim Behav 61:287–296. https://doi.org/10.1006/anbe.2000.1539
Thums M, Bradshaw CJA, Sumner MD, Horsburgh JM, Hindell MA (2013) Depletion of deep marine food patches forces divers to give up early. J Anim Ecol 82:72–83. https://doi.org/10.1111/j.1365-2656.2012.02021.x
Tremblay Y, Cherel Y (2000) Benthic and pelagic dives: a new foraging behaviour in rockhopper penguins. Mar Ecol Prog Ser 204:257–267
Wakefield E, Phillips R, Matthiopoulos J (2009) Quantifying habitat use and preferences of pelagic seabirds using individual movement data: a review. Mar Ecol Prog Ser 391:165–182. https://doi.org/10.3354/meps08203
Walton P, Ruxton GD, Monaghan PAT (1998) Avian diving, respiratory physiology and the marginal value theorem. Anim Behav 56:165–174
Watanuki Y, Burger AE (1999) Body mass and dive duration in alcids and penguins. Can J Zool 77:1838–1842
Weimerskirch H (2007) Are seabirds foraging for unpredictable resources? Deep Sea Res Part II Top Stud Oceanogr 54:211–223. https://doi.org/10.1016/j.dsr2.2006.11.013
Weimerskirch H, Bertrand S, Silva J, Bost C, Peraltilla S (2012) Foraging in Guanay cormorant and Peruvian booby, the major guano-producing seabirds in the Humboldt Current System. Mar Ecol Prog Ser 458:231–245. https://doi.org/10.3354/meps09752
Wilson R, Wilson M (1995) The foraging behaviour of the African penguin Spheniscus demersus. In: The penguins: ecology and management. Dann P, Norman, I, Reilly P pp 244–265
Wilson RP (1995) Foraging ecology. In: The penguins, Oxford University Press. Williams TD, Oxford, pp 81–106
Wilson RP (2003) Penguins predict their performance. Mar Ecol Prog Ser 249:305–310
Wilson RP (2010) Resource partitioning and niche hyper-volume overlap in free-living Pygoscelid penguins: Competition in sympatric penguins. Funct Ecol 24:646–657. https://doi.org/10.1111/j.1365-2435.2009.01654.x
Wilson RP, Quintana F (2004) Surface pauses in relation to dive duration in imperial cormorants; how much time for a breather? J Exp Biol 207:1789–1796. https://doi.org/10.1242/jeb.00967
Ydenberg RC, Forbes LS (1988) Diving and foraging in the western grebe. Ornis Scand 129–133
Acknowledgements
The authors thank all the fieldworkers for their help with data collection in the Kerguelen area, especially Florian Orgeret, Elie Gajet and Alexandre Corbeau. The study was supported financially and logistically by the Institut Polaire Français Paul Emile Victor (program no. 394 “Oiseaux Plongeurs”, C.A. Bost) and the Terres Australes et Antarctiques Françaises. The ethics committee of Institut polaire français Paul Emile Victor approved all field procedures. We are especially indebted to Manfred Enstipp and Carin Reisinger for helpful comments and English editing.
Author information
Authors and Affiliations
Contributions
Charles-André Bost contributed to the study conception and design. Analysis was performed by Eugénie Tessier. The first draft of the manuscript was written by Eugénie Tessier and Charles-André Bost commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
All experimental procedures were approved by the French ethics committee and the French Polar Environmental Committee and conducted in accordance with their guidelines.
Additional information
Responsible Editor: V. Paiva.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Reviewed by G. Traisnel, P. Pistorius and an undisclosed expert.
Rights and permissions
About this article

Cite this article
Tessier, E., Bost, CA. Behavioural adjustments during foraging in two diving seabirds: king and macaroni penguins. Mar Biol 167, 138 (2020). https://doi.org/10.1007/s00227-020-03711-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00227-020-03711-z