
Abstract
The advent of Fastloc-GPS is helping to transform marine animal tracking by allowing the collection of high-quality location data for species that surface only briefly. We show how the improved location accuracy of Fastloc-GPS compared to Argos tracking is expected to lead to far more accurate home range estimates, particularly for animals moving over the scale of a few km. We reach this conclusion using simulated data and home range estimates derived from empirical tracking data for green sea turtles (Chelonia mydas) equipped with Argos linked Fastloc-GPS tags at three different foraging areas (western Indian Ocean, Western Australia, and Caribbean). Poor-quality Argos locations (e.g., location classes A, B) produced home range estimates ranging from 10 to 100 times larger than those derived from Fastloc-GPS data, whereas high-quality Argos locations (location classes 1–3) produced home range estimates that were generally comparable to those derived from Fastloc-GPS data. However, the limited number of Argos class 1–3 locations obtained for all three turtles—an average of 14.6 times more Fastloc-GPS locations were obtained compared to Argos class 1–3 locations—resulted in blurred patterns of space use. In contrast, the high volume of Fastloc-GPS locations revealed fine-scale movements in striking detail (i.e., use of discrete patches separated by just a few 100 m). We recommend careful consideration of the effects of location accuracy and data volume when developing sampling regimes for marine tracking studies and make recommendations regarding how sampling can be standardized to facilitate meaningful spatial and temporal comparisons of space use.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Understanding patterns of space use by animals lies at the heart of many ecological studies and also underpins many efforts to make evidenced-based management decisions, for example as part of conservation planning (Cooke 2008). Thanks to increased accessibility of tracking technology (Kays et al. 2015; Hays et al. 2016), both the number of taxa tracked and the number of studies collecting movement data across different habitats are rapidly increasing. However, the ability to reliably detect differences in space use among individuals, species, and locations crucially depends on the sampling regime used including the accuracy and amount of location data obtained (Börger et al. 2006a, b; Frair et al. 2010; Hebblewhite and Haydon 2010; Montgomery et al. 2011; McClintock et al. 2015). While the importance of the quality and abundance of location data for studying animal movements has been well known for some time in certain fields, particularly terrestrial ecology (e.g., Harris et al. 1995), in other fields with a shorter tracking history, the message is less well appreciated. As such, it is important to revisit some of the key messages in home range estimation to avoid methodological artefacts obscuring true differences in space use.
In the marine context, a major advance in recent years has been the advent of Fastloc-GPS tracking (Kuhn et al. 2009; Hazen et al. 2012; Hoenner et al. 2012). Conventional GPS receivers need several seconds to generate a location estimate, which has precluded their use on marine species that only surface briefly. In contrast, Fastloc-GPS overcomes this problem with the rapid (typically tens of milliseconds) acquisition of GPS data when an animal surfaces and subsequent post-processing to derive position estimates. Fastloc-GPS has massively improved the accuracy of location data compared to traditional Argos tracking and is now widely used to track diverse marine taxa including sea turtles (Hazel 2009; Schofield et al. 2010a, b), marine mammals (Costa et al. 2010), and fish (Sims et al. 2009). Fastloc-GPS tags can be deployed as data loggers, which store data for subsequent download when the unit is retrieved, or can be interfaced with an Argos tag (i.e., Argos linked Fastloc-GPS tags), so that data are received by the Fastloc-GPS receiver and then relayed via the Argos system.
Here, we consider the implications of high-resolution Fastloc-GPS tracking for home range estimation and fine-scale movement analysis in sea turtles. First, we use simulations to show the general importance of location accuracy for home range estimation. We then support these simulations with empirical data collected for green turtles (Chelonia mydas) tracked using Argos linked Fastloc-GPS tags, which allowed the utility of both the Argos and Fastloc-GPS data to be compared for the same individuals. Finally, we provide recommendations for how future work might proceed to identify fine-scale patterns of space use within and among individuals, species and study systems in the marine environment.
Materials and methods
Simulations
To evaluate the impact of location accuracy on home range estimation, we generated distributions of the location of simulated animals whose available habitat size varied by three orders of magnitude. For computational simplicity, we drew animal locations (N = 1000) from a bivariate normal distribution within square-shaped habitats of 1, 10, 100, and 1000 km2. We considered these to be the ‘true’ animal locations. We then used the package adehabitatHR (Calenge 2006) in R v. 3.3.2 (R Core Team 2016) to estimate the 95% home range of the animal in each habitat size via the fixed kernel method (Worton 1989). We used the reference bandwidth (h ref) as a smoothing parameter, which is suitable for bivariate normal data (Calenge 2006) and provides a conservative estimate thanks to oversmoothing (Bowman and Azzalini 1997).
We then introduced errors to the ‘true’ animal locations to obtain home range size estimates under different levels of location accuracy. We did so by drawing random errors from a bivariate normal distribution with a mean of 0 and a standard deviation (SD) ranging from 0 to 2 km in increments of 0.01. This range was selected, because it would encompass Fastloc-GPS errors (Hazel 2009; Dujon et al. 2014) and most Argos location class errors excluding those with the highest uncertainty such as classes 0 and B (Costa et al. 2010). Our aim here was not to evaluate specific location classes, because reported errors vary considerably among studies (Table 1). Rather, we sought to assess the impact of location accuracy along a gradient that would include location qualities commonly encountered in sea turtle home range studies. For simplicity, we assumed that latitudinal and longitudinal errors were equivalent. While we are aware that Argos error distributions tend to be elliptical, with longitudinal exceeding latitudinal errors (Hays et al. 2001; Costa et al. 2010; Boyd and Brightsmith 2013), this does not affect our ability to illustrate the general impact of location quality on home range estimation across orders of magnitude of animal movements.
The random errors (N = 1000 for each theoretical animal) were added to the ‘true’ simulated animal locations to create error-added location data sets. We then used the kernel method, as above, to estimate each animal’s 95% home range size using the error-added locations and calculated the percent error between this value and the true home range size. This was repeated 10 times for each animal for a total of 4 × 10 × 201 = 8040 iterations. We calculated the mean percent error at each increment of SD (location error) and smoothed the resulting curve for each simulated animal by calculating a running mean spanning three consecutive data points. For ease of visualization, percent error data were log10(x + 1)-transformed.
Empirical case study
We equipped green turtles with Argos linked Fastloc-GPS tags (SPLASH10-BF tags, Wildlife Computers, Seattle, Washington) at three sites around the world: the Chagos Archipelago (Indian Ocean) in 2012, Shark Bay (Western Australia) in 2016, and Bonaire (Caribbean Netherlands) in 2016. These units provided both Argos and Fastloc-GPS locations. To compare home range estimates from Argos versus Fastloc-GPS data, we selected one representative data set from each site: a green turtle tracked for 14 months in the Chagos Archipelago, one tracked for 3 months in Shark Bay, and one tracked for 5 months in Bonaire. To compare the number of Fastloc-GPS versus Argos locations obtained, we used data from all the turtles equipped in the Chagos Archipelago and Shark Bay. Since the tags deployed in Bonaire were also programmed to relay other data (e.g., depth) at the expense of sending Fastloc-GPS data, we did not include these tags in the comparison of location data volume.
For Fastloc-GPS, we excluded locations with a residual value ≥35, which is a standard procedure for Fastloc-GPS data (Dujon et al. 2014). Then, using previously established methods (Luschi et al. 1998; Dujon et al. 2014; Hays et al. 2014; Christiansen et al. 2017), we removed the most obvious Argos and Fastloc-GPS locations that were likely erroneous. To do this, we examined each track visually and identified locations that appeared inconsistent with adjacent points (i.e., they were off the path of previous and subsequent locations). Further analysis confirmed that these locations necessitated speeds of travel that were unrealistic for sea turtles (>200 km d−1). These steps were designed to reflect commonly used filtering procedures for both data types, and removed a very small proportion of locations (0.5% of Argos locations and 0.1% of Fastloc-GPS locations).
To remove the impact of fine-scale autocorrelation, we randomly selected a single location per day from each location class (see below) for each turtle prior to estimating home range sizes. We used the R package adehabitatHR to estimate home range size, as above. However, we used a different smoothing approach, since the ‘real-world’ latitude and longitude data were multi-modal (i.e., not bivariate normal) and using the reference bandwidth can cause a large amount of oversmoothing in such cases, leading to overestimation of home range size (Worton 1989; Kie 2013). Instead, using a custom script in R, for each home range estimate, we identified the minimum h value below which the continuous home range contour breaks up into two or more polygons (the minimum h rule, see Fieberg and Börger 2012 and references therein). Due to low sample size in certain location classes, we pooled Argos classes 1, 2, and 3 together, lumped Fastloc-GPS locations derived from 9 satellites with those derived from 8 satellites, and excluded Argos class 0 entirely.
Subsequently, to account for the possible impact of data volume on home range estimation, we standardized the number of locations used to estimate home range size across location classes. We did so for each individual by randomly selecting 75% of the smallest sample size available in a location class for all location classes for that turtle 10 times. We then estimated the 95% home range size at each iteration and calculated the mean and SE for each location class. Since our aim here was to evaluate the trend in home range size across location classes within each site/individual, as opposed to comparing turtle home range sizes among sites/individuals, it was not necessary to use the same volume of data for each turtle. Therefore, for our present purpose, we allowed the number of locations to vary from turtle-to-turtle based on the amount of data obtained by each tag. For the Chagos turtle, many fewer locations were available in Argos location classes 1–3 compared to other classes, so we did not sub-sample this location class, instead producing a single estimate of home range size.
Results
Simulations
The degree of error in home range size estimates in our simulations depended strongly on location accuracy (SD) and habitat size (Fig. 1). Specifically, as habitat size increased, the accuracy of locations needed to reliably estimate home range size decreased. For example, at a habitat size of 1000 km2, a location error distribution with an SD <1.67 km was necessary to produce <10% error in home range size estimates. In contrast, at a habitat size of 1 km2, a location error distribution with an SD of <0.06 km was necessary to achieve <10% error (Fig. 1). The former case would likely include Argos location classes 1–3 and all Fastloc-GPS locations, while the latter case would likely only include Fastloc-GPS locations derived from ≥5 satellites.

Percent error between the true and error-added 95% home range estimates for simulated animals within square-shaped habitats of 1, 10, 100 and 1000 km2 across different location qualities including all values of SD from 0 to 2 (a) and SD ≤0.3 (b). Percent error data are shown on a log10(x + 1) scale due to large differences in these values at high SDs, although axis labels are untransformed for ease of interpretation. Values below the horizontal dashed line represent <10% error between the error-added and true home range size
Empirical case study
For green turtles in the Chagos Archipelago, Western Australia, and the Caribbean, home range estimates declined by a factor of approximately 10, 12, and 100, respectively, when moving from the poorest to the best location quality (Fig. 2). Argos location classes A and B dramatically overestimated home range size, whereas Argos location classes 1–3 provided generally comparable estimates to Fastloc-GPS data, with the exception of the Caribbean turtle (Fig. 2). However, Fastloc-GPS tracking revealed much more restricted movements and a much higher degree of patchiness in space use compared to Argos tracking, which tended to blur the pattern of space use (Fig. 3). This was true even when considering only the best-quality Argos data (i.e., location classes 1–3, Fig. 4). In this case, the sparseness of class 1–3 Argos locations meant that details of how multiple focal patches were used by each animal went unobserved. Compared to location accuracy, standardizing data volume across location classes had a relatively minor impact on the trend in home range size from the poorest to best location quality for both turtles (Fig. 2).

Estimated 95% home range sizes derived from different location qualities for a green turtle tracked for 14 months in the Chagos Archipelago, western Indian Ocean (a), another tracked for 3 months in Shark Bay, Western Australia (b), and a third tracked for 5 months in Bonaire, Caribbean Netherlands. For (a) and (b), the dashed line with triangles represents home range estimates based on all available data (1 location per day) per location class, while the solid line with circles represents the mean (±SE) estimate based on sub-sampled data to standardize data volume across location classes (see “Materials and Methods”). For the Chagos turtle, the estimate for Argos location classes 1–3 is a single value based on all available locations due to low sample size

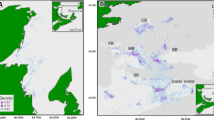
Argos (left panels) and Fastloc-GPS (right panels) location distributions for a green turtle tracked for 14 months in the Chagos Archipelago, western Indian Ocean (a, b), another tracked for 3 months in Shark Bay, Western Australia (c, d), and a third tracked for 5 months in Bonaire, Caribbean Netherlands (e, f). Argos plots include all location data (classes A, B, 0, 1, 2 and 3), while Fastloc-GPS plots include locations derived from ≥4 satellites. Points have been made transparent to show location density. Note differences in scale among plots. To emphasize the differences in scale, hashed squares within Argos panels show the extent of the Fastloc-GPS data for that study site

Differences in movement detail provided by the most accurate Argos data (classes 1–3, left panels) and Fastloc-GPS data (locations derived from ≥4 satellites, right panels) for the three green turtles. Points have been made transparent to show location density. Note minor differences in scale among plots
On average, there were 14.6 times (range 6.8–27.0) more Fastloc-GPS locations obtained compared to high-quality (location class 1–3) Argos locations, and this pattern for more Fastloc-GPS data occurred across all individuals (Fig. 5). This increased volume of locations underlies the much clearer pattern of space use that emerged when plotting the Fastloc-GPS data and the tendency of these data to reveal how multiple small patches were used by each individual.

For nine turtles tracked using Fastloc-GPS Argos transmitters, the proportion of Fastloc-GPS locations (derived from ≥4 satellites and with residual values <35, filled bars) compared to high-accuracy Argos locations (location class 1–3, open bars). Turtles 1–4 were equipped on Diego Garcia, Chagos Archipelago, while turtles 5–9 were tagged in Shark Bay, Western Australia
Discussion
In recent years, technological advances have led to rapid improvement in the quality of locations obtainable for air-breathing marine vertebrates and some fish and, hence, increased variability in track quality in the literature (e.g., Table 2 for sea turtles). As such, consideration of the impacts of location accuracy and data volume for home range estimation and fine-scale movement analysis for these species is timely. We have shown that location accuracy can profoundly impact estimated home range size, with exceedingly large errors likely to occur under a combination of low location accuracy and fine-scale animal movements. Furthermore, we have shown that Fastloc-GPS tracking can reveal movement patterns in fine detail (i.e., patch use) in situations where Argos data cannot. In studies looking at space use, we emphasize that it is important to consider the level of location error inherent in the tracking system and how this error interacts with the scale of movement to impact the picture of space use that emerges (see also Montgomery et al. 2011 for terrestrial examples). Moreover, we urge caution when comparing home range estimates obtained from different tracking systems or tag configurations that provide locations of different levels of accuracy.
Recent movement analyses for sea turtles have been made using light-based geolocation, radio telemetry, acoustic telemetry, Argos satellite tracking, and Fastloc-GPS tracking, which have a wide range of location accuracies (Table 2). These studies all provide important space use data that are consistent within each study. For example, Schofield et al. (2010b) used Fastloc-GPS data from loggerhead turtles in the Mediterranean to show that oceanic foragers had home ranges >50 times larger than neritic foragers, while Esteban et al. (2017) used Fastloc-GPS to quantify the number of clutches individual green turtles laid in a single breeding season. However, while Fastloc-GPS tracking has been available for several years, due to the lower cost of Argos tags, many studies still rely on Argos locations (e.g., Hawkes et al. 2011; Fujisaki et al. 2016; Shaver et al. 2016). Given the magnitude of error in home range estimates identified in our theoretical and empirical examples (see also Witt et al. 2010), we argue that comparison of home range estimates, in addition to other movement metrics (e.g., Bradshaw et al. 2007), should only be made after carefully accounting for differences in location quality between tracks. For example, it might be of interest to examine variation in home range size over space or time using a combination of newer Fastloc-GPS and older Argos tracks. To do this reliably would require decaying the GPS data by introducing random Argos-level errors to the GPS data (similar to the approach taken in our theoretical home range analysis) and standardizing sample size among tracks.
In addition to highlighting the relationship between location accuracy, the scale of animal movements, and home range estimation, we have demonstrated the potential for Fastloc-GPS data to yield valuable new insights into the patterns, drivers, and consequences of the movements of sea turtles at very fine spatial scales (e.g., patch use dynamics). This utility of Fastloc-GPS for examining fine-scale movements will likely apply to other marine taxa that only surface briefly including some marine mammals, birds, and fish. As in our study, an increased number of Fastloc-GPS locations has been noted when Argos linked Fastloc-GPS tags have been attached to fish (Sims et al. 2009; Evans et al. 2011). The increased number of Fastloc-GPS locations which we found is likely due to the fact that data for a Fastloc-GPS location can be encoded in a single Argos uplink, while many uplinks in a single satellite overpass are required to generate an Argos location of class 1–3. As such, the finding of a vastly greater volume of Fastloc-GPS locations compared to Argos locations when using Argos linked Fastloc-GPS tags will likely be broadly consistent across taxa. Furthermore, Fastloc-GPS tags can be used in data loggers, which can increase data volume by a further order of magnitude compared to the data volumes recoverable by satellite (Schofield et al. 2010b).
Future comparative studies that analyze GPS-based tracks of foraging turtles in a standardized manner hold considerable potential to advance our understanding of turtle space use, trophic relationships and functional roles in coastal ecosystems. It should be noted that, in addition to location accuracy and data volume (e.g., Seaman et al. 1999; Börger et al. 2006a, b), other components of home range analysis are also known to influence estimates of home range size and should, therefore, be accounted for when designing comparative studies. For example, KDEs can be strongly influenced by the smoothing parameter used (Worton 1989; Kie 2013), and the choice of smoothing parameter will depend on the structure of the location data and the particular question being asked (Fieberg and Börger 2012). Similarly, Service Argos have been trying to improve the quality of their tracking data. Specifically, Service Argos introduced a new method of estimating platform locations which combines their traditional approach—using the Doppler shift in received uplink frequencies and a least-squares algorithm—with interpolation between locations using Kalman filtering (Lopez et al. 2014). This new method of processing tends to provide smoother tracks, but the autocorrelation between locations introduced by Kalman filtering will need to be considered if these data are used in home range estimation, especially when compared with tracks without Kalman filtering. It may, therefore, be advisable for researchers to obtain and store the Kalman-filtered locations as well as the underlying raw Argos locations, which may not both be provided automatically by Service Argos. Doing so will create the potential to implement more sophisticated analyses accounting for the error of each single location. Refer also to McClintock et al. (2015) for arguments regarding the importance of using the error ellipse and not the error circle in movement analyses as well as the importance of not discarding more ‘inaccurate’ locations (see Ironside et al. 2017 for a similar remark for terrestrial GPS data).
Moreover, aspects of the movement pattern of animals may sometimes interact with methods of data processing to influence the picture of space use that emerges. For example, visual observations have shown that green turtles often rest in certain areas at night and then travel to foraging locations during the day (Bjorndal 1980). The specifics of these movements have recently been recorded in high resolution with Fastloc-GPS tracking (Christiansen et al. 2017), with the finding that nighttime resting and daytime foraging areas may be several km apart. Therefore, in this case, only using daytime or nighttime locations, even if they are of high resolution, would not capture the full extent of space use (see also general discussion in Fieberg and Börger 2012). Likewise, locations around dawn and dusk are needed to identify migration corridors between areas occupied during the night and day. Again, Fastloc-GPS opens up the potential of addressing these questions, but, at the same time, comparative studies of space use, across individuals and across studies, will require careful consideration of these sources of variability.
In conclusion, our results highlight an important yet underappreciated aspect of movement ecology study design for air-breathing marine vertebrates and some fish. Our understanding of the fine-scale movements of these taxa lags well behind that of terrestrial vertebrates, which have been tracked effectively using Argos and GPS systems for some time. For general considerations on study design, we recommend consulting the framework that has grown out of that body of work (e.g., Seaman et al. 1999; Börger et al. 2006a, b; Frair et al. 2010; Hebblewhite and Haydon 2010; Montgomery et al. 2011; Fieberg and Börger 2012; McClintock et al. 2015; Ironside et al. 2017). Here, we emphasize that location accuracy relative to the expected scale of animal movements should be a key methodological consideration and we recommend caution when comparing home range estimates and other movement metrics derived from tracking systems with different location qualities and data volumes.
References
Bjorndal KA (1980) Nutrition and grazing behaviour of the green turtle Chelonia mydas. Mar Biol 56:147–154. doi:10.1007/BF00397131
Börger L, Franconi N, De Michele G, Gantz A, Meschi F, Manica A, Lovari S, Coulson T (2006a) Effects of sampling regime on the mean and variance of home range estimates. J Anim Ecol 75:1393–1405. doi:10.1111/j.1365-2656.2006.01164.x
Börger L, Franconi N, Ferretti F, Meschi F, De Michele G, Gantz A, Coulson T (2006b) An integrated approach to identify spatiotemporal and individual-level determinants of home range size. Am Nat 168:471–485. doi:10.1086/507883
Bowman AW, Azzalini A (1997) Applied smoothing techniques for data analysis. Clarendon, Oxford
Boyd JD, Brightsmith DJ (2013) Error properties of Argos satellite telemetry locations using least squares and Kalman filtering. PLoS One. doi:10.1371/journal.pone.0063051
Bradshaw CJA, Sims DW, Hays GC (2007) Measurement error causes scale-dependent threshold erosion of biological signals in animal movement data. Ecol Appl 17:628–638
Calenge C (2006) The package “adehabitat” for the R software: a tool for the analysis of space and habitat use by animals. Ecol Model 197:516–519. doi:10.1016/j.ecolmodel.2006.03.017
Christiansen F, Esteban N, Mortimer JA, Dujon AM, Hays GC (2017) Diel and seasonal patterns in activity and home range size of green turtles on their foraging grounds revealed by extended Fastloc-GPS tracking. Mar Biol 164:10. doi:10.1007/s00227-016-3048-y
Cooke SJ (2008) Biotelemetry and biologging in endangered species research and animal conservation: relevance to regional, national, and IUCN Red List threat assessments. Endanger Species Res 4:165–185. doi:10.3354/esr00063
Costa DP, Robinson PW, Arnould JPY, Harrison A-L, Simmons SE, Hassrick JL, Hoskins AJ, Kirkman SP, Oosthuizen H, Villegas-Amtmann S, Crocker DE (2010) Accuracy of ARGOS locations of pinnipeds at-sea estimated using Fastloc GPS. PLoS One. doi:10.1371/journal.pone.0008677
Dujon AM, Lindstrom RT, Hays GC (2014) The accuracy of Fastloc-GPS locations and implications for animal tracking. Methods Ecol Evol 5:1162–1169. doi:10.1111/2041-210X.12286
Esteban N, Mortimer JA, Hays GC (2017) How numbers of nesting sea turtles can be over-estimated by nearly a factor of two. Proc R Soc Lond B 284:20162581. doi:10.1098/rspb.2016.2581
Evans K, Baer H, Bryant E, Holland M, Rupley T, Wilcox C (2011) Resolving estimation of movement in a vertically migrating pelagic fish: does GPS provide a solution? J Exp Mar Biol Ecol 398:9–17. doi:10.1016/j.jembe.2010.11.006
Fieberg J, Börger L (2012) Could you please phrase “home range” as a question? J Mamm 93:890–902. doi:10.1644/11-MAMM-S-172.1
Frair JL, Fieberg J, Hebblewhite M, Cagnacci F, DeCesare NJ, Pedrotti L (2010) Resolving issues of imprecise and habitat-biased locations in ecological analyses using GPS telemetry data. Phil Trans R Soc B 365:2187–2200. doi:10.1098/rstb.2010.0084
Fujisaki I, Hart KM, Sartain-Iverson AR (2016) Habitat selection by green turtles in a spatially heterogeneous benthic landscape in Dry Tortugas National Park, Florida. Aquat Biol 24:185–199. doi:10.3354/ab00647
Fuller WJ, Broderick AC, Phillips RA, Silk JRD, Godley BJ (2008) Utility of geolocating light loggers for indicating at-sea movements in sea turtles. Endanger Species Res 4:139–146. doi:10.3354/esr00048
Godley BJ, Blumenthal JM, Broderick AC, Coyne MS, Godfrey MH, Hawkes LA, Witt MJ (2008) Satellite tracking of sea turtles: where have we been and where do we go next? Endanger Species Res 4:3–22. doi:10.3354/esr00060
Harris S, Cresswell WJ, Forde PG, Trewehella WJ, Woollard T, Wray S (1995) Home-range analysis using radio-tracking data—a review of problems and techniques particularly as applied to the study of mammals. Mamm Rev 20:97–123. doi:10.1111/j.1365-2907.1990.tb00106.x
Hawkes LA, Witt MJ, Broderick AC, Coker JW, Coyne MS, Dodd M, Frick MG, Godfrey MH, Griffin DB, Murphy SR, Murphy TM, Williams KL, Godley BJ (2011) Home on the range: spatial ecology of loggerhead turtles in Atlantic waters of the USA. Divers Distrib 17:624–640. doi:10.1111/j.1472-4642.2011.00768.x
Hays GC, Åkesson S, Godley BJ, Luschi P, Santidrian P (2001) The implications of location accuracy for the interpretation of satellite-tracking data. Anim Behav 61:1035–1040. doi:10.1006/anbe.2001.1685
Hays GC, Mortimer JA, Ierodiaconou D, Esteban N (2014) Use of long-distance migration patterns of an endangered species to inform conservation planning for the world’s largest marine protected area. Conserv Biol 28:1636–1644. doi:10.1111/cobi.12325
Hays GC, Ferreira LC, Sequeira AMM, Meekan MG, Duarte CM, Bailey H, Bailleul F, Bowen WD, Caley MJ, Costa DP, Eguíluz VM, Fossette S, Friedlaender AS, Gales N, Gleiss AC, Gunn J, Harcourt R, Hazen EL, Heithaus MR, Heupel M, Holland K, Horning M, Jonsen I, Kooyman GL, Lowe CG, Madsen PT, Marsh H, Phillips RA, Righton D, Ropert-Coudert Y, Sato K, Shaffer SA, Simpfendorfer CA, Sims DW, Skomal G, Takahashi A, Trathan PN, Wikelski M, Womble JN, Thums M (2016) Key questions in marine megafauna movement ecology. Trends Ecol Evol 6:463–475. doi:10.1016/j.tree.2016.02.015
Hazel J (2009) Evaluation of fast-acquisition GPS in stationary tests and fine-scale tracking of green turtles. J Exp Mar Biol Ecol 374:58–68. doi:10.1016/j.jembe.2009.04.009
Hazen EL, Maxwell SM, Bailey H, Bograd SJ, Hamann M, Gaspar P, Godley BJ, Shillinger GL (2012) Ontogeny in marine tagging and tracking science: technologies and data gaps. Mar Ecol Prog Ser 457:221–240. doi:10.3354/meps09857
Hebblewhite M, Haydon DT (2010) Distinguishing technology from biology: a critical review of the use of GPS telemetry data in ecology. Phil Trans R Soc B 365:2303–2312. doi:10.1098/rstb.2010.0087
Hoenner X, Whiting SD, Hindell MA, McMahon CR (2012) Enhancing the use of Argos satellite data for home range and long distance migration studies of marine animals. PLoS One 7:e40713. doi:10.1371/journal.pone.0040713
Ironside KE, Mattson DJ, Arundel TR, Hansen JR (2017) Is GPS telemetry location error screening beneficial? Wildl Biol. doi:10.2981/wlb.00229
Kays R, Crofoot MC, Jetz W, Wikelski M (2015) Terrestrial animal tracking as an eye on life and planet. Science 348:aaa2478. doi:10.1126/science.aaa2478
Kie J (2013) A rule-based ad hoc method for selecting a bandwidth in kernel home-range analyses. Anim Biotelem 1:13
Kuhn CE, Johnson DS, Ream RR, Gelatt TS (2009) Advances in the tracking of marine species: using GPS locations to evaluate satellite track data and a continuous-time movement model. Mar Ecol Prog Ser 393:97–109. doi:10.3354/meps08229
Lopez R, Malardé J-P, Royer F, Gaspar P (2014) Improving Argos doppler location using multiple-model Kalman filtering. IEEE Trans Geosci Remote Sens 52:4744–4755. doi:10.1109/TGRS.2013.2284293
Luschi P, Hays GC, Del Seppia C, Marsh R, Papi F (1998) The navigational feats of green sea turtles migrating from Ascension Island investigated by satellite telemetry. Proc Roy Soc Lond B 265:2279–2284. doi:10.1098/rspb.1998.0571
McClintock BT, London JM, Cameron MF, Boveng PL (2015) Modelling animal movement using the Argos satellite telemetry location error ellipse. Methods Ecol Evol 6:266–277. doi:10.1111/2041-210X.12311
Montgomery RA, Roloff GJ, Ver Hoef JM (2011) Implications of ignoring telemetry error on inference in wildlife resource use models. J Wildl Manag 75:702–708. doi:10.1002/jwmg.96
Ogden JC, Robinson L, Whitlock K, Daganhardt H, Cebula R (1983) Diel foraging patterns in juvenile green turtles (Chelonia mydas L.) in St. Croix United States Virgin Islands. J Exp Mar Biol Ecol 66:199–205. doi:10.1016/0022-0981(83)90160-0
Papi F, Liew HC, Luschi P, Chan EH (1995) Long-range migratory travel of a green turtle tracked by satellite: evidence for navigational ability in the open sea. Mar Biol 122:171–175. doi:10.1007/BF00348929
R Core Team (2016) R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Australia. URL https://www.R-project.org/. Accessed 1 Dec 2016
Renaud ML, Carpenter JA, Williams JA (1995) Activities of juvenile green turtles, Chelonia mydas, at a jettied pass in South Texas. Fish Bull 93:586–593
Schofield G, Hobson VJ, Lilley MKS, Katselidis KA, Bishop CM, Brown P, Hays GC (2010a) Inter-annual variability in the home range of breeding turtles: implications for current and future conservation management. Biol Conserv 143:722–730. doi:10.1016/j.biocon.2009.12.011
Schofield G, Hobson VJ, Fossette S, Lilley MKS, Katselidis KA, Hays GC (2010b) Fidelity to foraging sites, consistency of migration routes and habitat modulation of home range by sea turtles. Divers Distrib 16:840–853. doi:10.1111/j.1472-4642.2010.00694.x
Seaman DE, Millspaugh JJ, Kernohan BJ, Brundige GC, Raedeke KJ, Gitzen RA (1999) Effects of sample size on kernel home range estimates. J Wildl Manag 63:739–747. doi:10.2307/3802664
Seminoff JA, Jones TT (2006) Diel movements and activity ranges of green turtles (Chelonia mydas) at a temperate foraging area in the Gulf of California, Mexico. Herpetol Conserv Biol 1:81–86
Shaver DJ, Hart KM, Fujisaki I, Rubio C, Sartain-Iverson AR, Peña J, Gamez DG, Miron RD, Burchfield PM, Martinez HJ, Ortiz J (2016) Migratory corridors of adult female Kemp’s ridley turtles in the Gulf of Mexico. Biol Conserv 194:158–167. doi:10.1016/j.biocon.2015.12.014
Sims DW, Queiroz N, Humphries NE, Lima FP, Hays GC (2009) Long-term GPS tracking of ocean sunfish Mola mola offers a new direction in fish monitoring. PLoS One 4:e7351. doi:10.1371/journal.pone.0007351
Swimmer Y, McNaughton L, Foley D, Moxey L, Nielsen A (2009) Movements of olive ridley sea turtles Lepidochelys olivacea and associated oceanographic features as determined by improved light-based geolocation. Endanger Species Res 10:245–254. doi:10.3354/esr00164
Taquet C, Taquet M, Dempster T, Soria M, Ciccione S, Roos D, Dagorn L (2006) Foraging of the green sea turtle Chelonia mydas on seagrass beds at Mayotte Island (Indian Ocean), determined by acoustic transmitters. Mar Ecol Prog Ser 306:295–302. doi:10.3354/meps306295
Thums M, Whiting SD, Reisser JW, Pendoley KL, Pattiaratchi CB, Harcourt RG, McMahon CR, Meekan MG (2013) Tracking sea turtle hatchlings—a pilot study using acoustic telemetry. J Exp Mar Biol Ecol 440:156–163. doi:10.1016/j.jembe.2012.12.006
Vincent C, McConnell BJ, Ridoux V, Fedak MA (2002) Assessment of Argos location accuracy from satellite tags deployed on captive gray seals. Mar Mamm Sci 18:156–166. doi:10.1111/j.1748-7692.2002.tb01025.x
Whiting SD, Miller JD (1998) Short term foraging ranges of adult green turtles (Chelonia mydas). J Herpetol 32:330–337. doi:10.2307/1565446
Witt MJ, Åkesson S, Broderick AC, Coyne MS, Ellick J, Formia A, Hays GC, Luschi P, Stroud S, Godley BJ (2010) Assessing accuracy and utility of satellite-tracking data using Argos-linked Fastloc-GPS. Anim Behav 80:571–581. doi:10.1016/j.anbehav.2010.05.022
Worton BJ (1989) Kernel methods for estimating the utilization distribution in home-range studies. Ecology 70:164–168. doi:10.2307/1938423
Acknowledgements
We thank the Department of Parks and Wildlife, Western Australia for their assistance in deploying satellite tags in Shark Bay. Fieldwork in Bonaire was funded by the Netherlands Organization of Scientific Research (NWO-ALW 858.14.090). We thank Sea Turtle Conservation Bonaire for their assistance in deploying satellite tags in Bonaire. Fieldwork in the Chagos Archipelago was supported by a Darwin Initiative Challenge Fund Grant (EIDCF008), the Department of the Environment Food and Rural Affairs, the Foreign and Commonwealth Office, College of Science of Swansea University, and the British Indian Ocean Territory (BIOT) Scientific Advisory Group of the FCO. We would like to thank Ernesto and Kirsty Bertarelli, and the Bertarelli Foundation, for their support of this research. We acknowledge and thank the BIOT Administration for assistance and permission to carry out research within the Chagos Archipelago.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
All applicable international, national, and/or institutional guidelines for the care and use of animals were followed. Fieldwork in Shark Bay was conducted under Department of Parks and Wildlife (DPaW) Regulation 17 license #SF010887 and Florida International University IACUC approval #IACUC-15-034-CR01. Fieldwork in Bonaire was conducted under a permit from the “Openbaar Lichaam Bonaire” nr. 558/2015-2015007762 and was performed using appropriate animal care protocols. In the Chagos Archipelago, fieldwork was approved by the Commissioner for the BIOT (research permit dated 2 October 2012) and Swansea University Ethics Committee, and complied with all relevant local and national legislation. The authors have no conflicts of interest.
Additional information
Responsible Editor: P. Casale.
Reviewed by Undisclosed experts.
Rights and permissions
About this article

Cite this article
Thomson, J.A., Börger, L., Christianen, M.J.A. et al. Implications of location accuracy and data volume for home range estimation and fine-scale movement analysis: comparing Argos and Fastloc-GPS tracking data. Mar Biol 164, 204 (2017). https://doi.org/10.1007/s00227-017-3225-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00227-017-3225-7