
Abstract
For the \(d\)-dimensional incompressible Euler equation, the standard energy method gives local wellposedness for initial velocity in Sobolev space \(H^s(\mathbb R^d)\), \(s>s_c:=d/2+1\). The borderline case \(s=s_c\) was a folklore open problem. In this paper we consider the physical dimension \(d=2\) and show that if we perturb any given smooth initial data in \(H^{s_c}\) norm, then the corresponding solution can have infinite \(H^{s_c}\) norm instantaneously at \(t>0\). In a companion paper [1] we settle the 3D and more general cases. The constructed solutions are unique and even \(C^{\infty }\)-smooth in some cases. To prove these results we introduce a new strategy: large Lagrangian deformation induces critical norm inflation. As an application we also settle several closely related open problems.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The \(d\)-dimensional incompressible Euler equation takes the form
where \(u=u(t,x)=(u_1(t,x),\ldots ,u_d(t,x)):\, \mathbb R \times \mathbb R^d \rightarrow \mathbb R^d\) denotes the velocity of the fluid and \(p=p(t,x):\, \mathbb R \times \mathbb R^d \rightarrow \mathbb R\) is the pressure. The second equation \(\nabla \cdot u=0\) in (1.1) is usually called the incompressibility (divergence-free) condition. By taking the divergence on both sides of the first equation in (1.1), one can recover the pressure from the quadratic term in velocity by inverting the Laplacian in suitable functional spaces. Another way to eliminate the pressure is to use the vorticity formulation. For this we will discuss separately the 2D and 3D case. In 2D, introduce the scalar-valued vorticity function
By taking \(\nabla ^{\perp }\cdot \) on both sides of (1.1), we have the equation
Under some suitable regularity assumptions, the second equations in (1.2) can be written as a single equation
which is the usual Biot–Savart law. Alternatively one can express (1.3) as a convolution integral
We can then rewrite (1.2) more compactly as
We shall frequently refer to (1.4) as the usual 2D Euler equation in vorticity formulation. Note that (1.4) is a transport equation which preserves all \(L^p\), \(1\le p\le \infty \) norm of the vorticity \(\omega \). In the 3D case the vorticity is vector-valued and given by
The 3D Euler equation in vorticity formulation has the form
Note that the second equation above is just the Biot–Savart law in 3D. The expression \((\omega \cdot \nabla ) u\) is often referred to as the vorticity stretching term. It is one of the main sources of difficulties in the wellposedness theory of 3D Euler.
There is by now an extensive literature on the wellposedness theory for Euler equations. We shall only mention a few and refer to Majda-Bertozzi [23] and Constantin [8] for more extensive references. The papers of Lichtenstein [21] and Gunther [15] started the subject of local wellposedness in Hölder spaces \(C^{k,\alpha }\) (\(k\ge 1\), \(0<\alpha <1\)). In [29] Wolibner obtained global solvability of classical (belonging to Hölder class) solutions for 2D Euler (see Chemin [6] for a modern exposition). In [12] Ebin and Marsden proved the short time existence, uniqueness, regularity, and continuous dependence on initial conditions for solutions of the Euler equation on general compact manifolds (possibly with \(C^{\infty }\) boundary). Their method is to topologize the space of diffeomorphisms by Sobolev \(H^s\), \(s> d/2+1\) norms and then solve the geodesic equation using contractions. In [5] Bourguignon and Brezis generalized \(H^s\) to the case of \(W^{s,p}\) for \(s>d/p+1\). In [18] Kato proved local wellposedness of \(d\)-dimensional Euler in \(C_t^0H_x^m\) for initial velocity \(u_0\in H^m(\mathbb R^d)\) with integer \(m>d/2+1\). Later Kato and Ponce [20] proved wellposedness in the general Sobolev space \(W^{s,p}(\mathbb R^d) =(1-\Delta )^{-s/2} L^p(\mathbb R^d) \) with real \(s>d/p+1\) and \(1<p<\infty \). The key argument in [20] is the following commutator estimateFootnote 1 for the operator \(J^s=(1-\Delta )^{s/2}\):
To extend the local solutions globally in time, one can use the Beale-Kato-Majda criterion [4] which asserts that (here \(s>d/2+1\))
if and only if
By using this criterion and conservation of \(\Vert \omega \Vert _{\infty }\) in 2D, one can immediately deduce the global existence of Kato’s solutions in dimension two. In [27] (see also [28]) Vishik considered the borderline case \(s=d/p+1\) and obtained global solvability for the 2D Euler in Besov space \(B^{ 2/p+1}_{p,1}\) with \(1<p<\infty \). In [7] Chae proved local existence and uniqueness of solutions to \(d\)-dimensional Euler in critical Besov space (for velocity) \(B^{d/p+1}_{p,1}(\mathbb R^d)\) with \(1<p<\infty \). The local wellposedness in \(B^{1}_{\infty ,1}(\mathbb R^d)\), \(d\ge 2\) was settled by Pak and Park in [25]. Roughly speaking, all the aforementioned local wellposedness results rely on finding a certain Banach space \(X\) with the norm \(\Vert \cdot \Vert _X\) such that (take \(f=\nabla \times u\) and \(X=B^{d/p}_{p,1}\) for example)
-
(1)
If \(f\in X\), then \( \Vert f \Vert _{L^{\infty }} + \Vert \mathcal R_{ij} f \Vert _{L^{\infty }} \lesssim \Vert f \Vert _X\) (\(\mathcal R_{ij}\) is the Riesz transform);
-
(2)
Some version of a commutator estimate similar to (1.5) holds in \(X\).
The above are essentially minimal conditions needed to close the energy estimates. On the other hand, this type of scheme completely breaks down for the natural borderline Sobolev spaces such as \(H^{ d/2+1}\) (in terms of vorticity we have \(X=H^{d/2}\)) since both conditions will be violated. In [9, 11], wellposedness in critical \(H^{d/2+1}\) spaces were proved for some logarithmically regularized Euler equations. In [26], Takada constructedFootnote 2 several counterexamples of Kato-Ponce-type commutator estimates in critical Besov \(B^{d/p+1}_{p,q}(\mathbb R^d)\) and Triebel-Lizorkin spaces \(F^{d/p+1}_{p,q}(\mathbb R^d)\) for various exponents \(p\) and \(q\) (For Besov: \(1\le p\le \infty \), \(1< q\le \infty \); For Triebel-Lizorkin: \(1<p<\infty \), \(1\le q\le \infty \) or \(p=q=\infty \)). It should be noted that the vector fields used in his counterexamples are divergence-free. In light of these considerations, a well-known long standing open problem was the following
Conjecture 1.1
The Euler equation (1.1) is ill-posed for a class of initial data in \(H^{d/2+1}(\mathbb R^d)\).
Of course one can state analogous versions of Conjecture 1.1 in similar Sobolev spaces \(W^{d/p+1,p}\) or other Besov or Triebel-Lizorkin type spaces with various boundary conditions. A rather delicate matter is to give a precise (and satisfactory) formulation of the ill-posedness statement in Conjecture 1.1. The formulation and the proof of such a statement requires a deep understanding of how the critical space topology changes under the Euler dynamics.
To begin, one can consider explicit solutions to (1.1). In [13], DiPerna and Majda introduced the following shear flow (in their study of measure-valued solutions for 3D Euler):
where \(f\) and \(g\) are given single variable functions. This explicit flow (sometimes called “ 2+1/2 ”-dimensional flow) solves (1.1) with pressure \(p=0\). DiPerna and Lions used the above flow (see e.g. p152 of [22]) to show that for every \(1\le p<\infty \), \(T>0\), \(M>0\), there exists a smooth shear flow for which \(\Vert u(0)\Vert _{W^{1,p}(\mathbb T^3)}=1\) and \(\Vert u(T)\Vert _{W^{1,p}(\mathbb T^3)}>M\). Recently Bardos and Titi [3] revisited this example and constructed a weak solution which initially lies in \(C^{\alpha }\) but does not belong to any \(C^{\beta }\) for any \(t>0\) and \(1>\beta >\alpha ^2\). By similar arguments one can also deduce ill-posedness in \(F^{1}_{\infty ,2}\) and \(B^1_{\infty ,\infty }\) (see Remark 1 therein). In [24], Misiołek and Yoneda considered the logarithmic Lipschitz space \(\mathrm{LL }_{\alpha }(\mathbb R^d)\) consisting of continuous functions such that
They used the above shear-flow example to generate ill-posedness of 3D Euler in \(\mathrm{LL }_{\alpha }\) for any \(0<\alpha \le 1\). In connection with Conjecture 1.1, a related issue is the dependence of the solution operator on the underlying topology. In [19], to describe the sharpness of the continuous dependence on initial data in his wellposedness result, Kato showed that (see Example 5.2 therein) the solution operator for the Burgers equation is not Hölder continuous in \(H^s(\mathbb R)\), \(s\ge 2\) norm for any prescribed Hölder exponent. In [16] Himonas and Misiołek proved that for the Euler equation the data-to-solution map is not uniform continuous in \(H^s(\Omega )\) topology where \(s\in \mathbb R\) if \(\Omega =\mathbb T^d=\mathbb R^d/2\pi \mathbb Z^d\) and \(s>0\) if \(\Omega =\mathbb R^d\). Very recently Inci [17] strengthened this result and showed for any \(T>0\) that the solution map \(u(0) \rightarrow u(T)\) is nowhere locally uniformly continuous for \(H^s(\mathbb R^n)\), \(s>n/2+1\). In [10], Cheskidov and Shvydkoy proved ill-posedness of \(d\)-dimensional Euler in Besov spaces \(B^s_{r,\infty }(\mathbb T^d)\) where \(s>0\) if \(r>2\) and \(s>d(\frac{2}{r}-1)\) if \(1\le r\le 2\). However, as was pointed out by the aforementioned authors, the above works do not address the borderline Sobolev space \(H^{d/2+1}\) or similar critical spaces which was an outstanding open problem.
The purpose of this work and the companion [1] is to completely settle the borderline case \(H^{ d/2+1}\) (Conjecture 1.1) and several other related open problems. Roughly speaking, we prove the following
Theorem
Let the dimension \(d=2,3\). The Euler equation (1.1) is ill-posed in the Sobolev space \(W^{d/p+1,p} \) for any \(1\le p<\infty \) or the Besov space \(B^{d/p+1}_{p,q} \) for any \(1\le p<\infty \), \(1<q\le \infty \).
As a matter of fact, we shall show that in the borderline case, ill-posedness holds in the strongest sense. Namely for any given smooth initial data, we shall find special perturbations which can be made arbitrarily small in the critical Sobolev norm, such that the corresponding perturbed solution is unique (in other functional spaces) but loses borderline Sobolev regularity instantaneously in time. Our analysis shows that in some sense the ill-posedness happens in a very generic way. In particular, it is “dense” in the \(H^{ d/2+1}\) (and similarly for other critical spaces) topology.
In order to expound the main ideas without clouding it by technicalities, we only treat the 2D case in this paper. The companion paper [1] is devoted to the (more technical) strong ill-posedness results in borderline Besov and Sobolev spaces for 3D. The prominent difficulty in extending the analysis of this paper to 3D is the vorticity stretching effect (e.g. it renders the \(L^{\infty }\)-norm of vorticity hard to control) and certain nonlocal obstructions. We defer the discussion of these technical aspects to the end of this introduction.
We now state more precisely the main results. The first result is for 2D Euler with non-compactly supported data. A special feature is that our constructed solutions are \(C^{\infty }\)-smooth which are classical solutions.
Theorem 1.2
(2D non-compact case) For any given \(\omega ^{(g)}_0\in C_c^{\infty }(\mathbb R^2) \cap \dot{H}^{-1}(\mathbb R^2)\) and any \(\epsilon >0\), we can find a \(C^{\infty }\) perturbation \(\omega ^{(p)}_0:\mathbb R^2\rightarrow \mathbb R\) such that the following hold true:
-
(1)
\(\Vert \omega ^{(p)}_0 \Vert _{\dot{H}^1(\mathbb R^2)} + \Vert \omega ^{(p)}_0\Vert _{L^1(\mathbb R^2)} + \Vert \omega ^{(p)}_0\Vert _{L^{\infty }(\mathbb R^2)}+\Vert \omega ^{(p)}_0\Vert _{\dot{H}^{-1}(\mathbb R^2)} <\epsilon \).
-
(2)
Let \(\omega _0= \omega ^{(g)}_0 + \omega ^{(p)}_0\). The initial velocity \(u_0 = \Delta ^{-1} \nabla ^{\perp } \omega _0\) has regularity \(u_0 \in H^2(\mathbb R^2) \cap C^{\infty } (\mathbb R^2) \cap L^{\infty }(\mathbb R^2)\). The gradient of \(u_0\) has no decay at infinity in the sense that
$$\begin{aligned} \Vert \nabla u_0 \Vert _{L^{\infty }(\mathbb R^2)}=+\infty . \end{aligned}$$ -
(3)
There exists a unique classical solution \(\omega = \omega (t)\) to the 2D Euler equation (in vorticity form)
$$\begin{aligned} {\left\{ \begin{array}{ll} \partial _t \omega + (\Delta ^{-1} \nabla ^{\perp } \omega \cdot \nabla ) \omega =0, \quad 0<t\le 1, \, x \in \mathbb R^2,\\ \omega \Bigr |_{t=0} = \omega _0, \end{array}\right. } \end{aligned}$$satisfying
$$\begin{aligned} \max _{0\le t\le 1}\Bigl ( \Vert \omega (t,\cdot ) \Vert _{L^1}+\Vert \omega (t,\cdot )\Vert _{L^\infty } + \Vert \omega (t,\cdot )\Vert _{\dot{H}^{-1}} \Bigr )<\infty . \end{aligned}$$Here \(\omega (t) \in C^{\infty }\), \(u(t)=\Delta ^{-1} \nabla ^{\perp } \omega (t)\in C^{\infty } \cap L^2\cap L^{\infty }\) for each \(0\le t \le 1\).
-
(4)
For any \(0<t_0 \le 1\), we have
$$\begin{aligned} \mathrm{ess-sup }_{0<t \le t_0} \Vert \omega (t,\cdot ) \Vert _{\dot{H}^1} =+\infty . \end{aligned}$$(1.6)
Remark 1.3
The \(\dot{H}^{-1}\) assumption on the vorticity data \(\omega ^{(g)}_0\) can be removed. We include it here simply to stress that the perturbed solution can inherit \(\dot{H}^{-1}\) regularity which is natural since the corresponding velocity will be in \(L^2\). Of course one can also state similar results for \(\omega ^{(g)}_0 \in H^s\) with \(s>1\) or some other subcritical functional spaces.
Remark 1.4
In [19] Kato introduced the uniformly local Sobolev spaces \(L^p_{ul}(\mathbb R^d)\) [see (2.3)] and \(H^s_{ul}(\mathbb R^d)\). These spaces contain \(H^s(\mathbb R^d)\) and the periodic space \(H^s(\mathbb T^d)\). The statement (1.6) in Theorem 1.2 can be improved to
Similar results also hold for Theorem 1.5 below.
Our next result is for the compactly supported data for the 2D Euler equation. Note that this result carries over (with simple changes) to the periodic case as well. For simplicity we shall consider vorticity functions having one-fold symmetry. For example, we shall say \(g=g(x_1,x_2):\, \mathbb R^2\rightarrow \mathbb R\) is odd in \(x_2\) if
It is not difficult to check that the one-fold odd symmetry (of the vorticity function) is preserved by the Euler flow.
Theorem 1.5
(2D compact case) Let \(\omega ^{(g)}_0\in C_c^{\infty }(\mathbb R^2) \cap \dot{H}^{-1}(\mathbb R^2)\) be any given vorticity function which is odd in \(x_2\).Footnote 3 For any such \(\omega ^{(g)}_0\) and any \(\epsilon >0\), we can find a perturbation \(\omega ^{(p)}_0:\mathbb R^2\rightarrow \mathbb R\) such that the following hold true:
-
(1)
\(\omega ^{(p)}_0\) is compactly supported (in a ball of radius \(\le 1\)), continuous and
$$\begin{aligned} \Vert \omega ^{(p)}_0 \Vert _{\dot{H}^1(\mathbb R^2)} + \Vert \omega ^{(p)}_0\Vert _{L^{\infty }(\mathbb R^2)}+\Vert \omega ^{(p)}_0\Vert _{\dot{H}^{-1}(\mathbb R^2)} <\epsilon . \end{aligned}$$ -
(2)
Let \(\omega _0= \omega ^{(g)}_0 + \omega ^{(p)}_0\). Corresponding to \(\omega _0\) there exists a unique time-global solution \(\omega = \omega (t)\) to the Euler equation satisfying \(\omega (t) \in L^{\infty } \cap \dot{H}^{-1}\). Furthermore \(\omega \in C_t^0 C_x^0\) andFootnote 4 \(u=\Delta ^{-1} \nabla ^{\perp } \omega \in C_t^0 L_x^2 \cap C_t^0 C_x^{\alpha }\) for any \(0<\alpha <1\).
-
(3)
\(\omega (t)\) has additional local regularity in the following sense: there exists \(x_* \in \mathbb R^2\) such that for any \(x\ne x_*\), there exists a neighborhood \(N_x \ni x\), \(t_x >0\) such that \(\omega (t, \cdot ) \in C^{\infty } (N_x)\) for any \(0\le t \le t_x\).
-
(4)
For any \(0<t_0 \le 1\), we have
$$\begin{aligned} \mathrm{ess-sup }_{0<t \le t_0} \Vert \omega (t,\cdot ) \Vert _{\dot{H}^1} =+\infty . \end{aligned}$$More precisely, there exist \(0<t_n^1<t_n^2 <\frac{1}{n}\), open precompact sets \(\Omega _n\), \(n=1,2,3,\ldots \) such that \(\omega (t) \in C^{\infty }(\Omega _n)\) for all \(0\le t \le t_n^2\), and
$$\begin{aligned} \Vert \nabla \omega (t,\cdot ) \Vert _{L^2(\Omega _n)} >n, \quad \forall \, t\in [t_n^1,t_n^2]. \end{aligned}$$
Remark 1.6
In [30] Yudovich proved the existence and uniqueness of weak solutions to 2D Euler in bounded domains for \(L^{\infty }\) vorticity data. In our construction, since we have uniform in time \(L^{\infty }\) control of the vorticity \(\omega \) in 2D, the uniqueness of the constructed solution is not an issue and we shall not discuss this point further in this work.
In the rest of this introduction, we give a brief overview of the proofs of Theorems 1.2 and 1.5. The overall scheme consists of three steps. The first two steps are devoted to local constructions. The last step is a global patching argument. Some additional technical points needed to treat the 3D case in [1] will be clarified at the end.
- Step 1.:
-
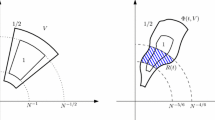
Creation of large Lagrangian deformation. Define the flow map associated to (1.1) as \(\phi =\phi (t,x)\) which solves
$$\begin{aligned} {\left\{ \begin{array}{ll} \partial _t \phi (t,x) = u(t,\phi (t,x)),\\ \phi (0,x) =x. \end{array}\right. } \end{aligned}$$For any \(0<T\ll 1\), \(B(x_0,\delta ) \subset \mathbb R^2\) with \(x_0 \in \mathbb R^2\) arbitrary and \(\delta \ll 1\), we choose initial (vorticity) data \(\omega ^{(0)}_a\) with \(\mathrm{supp }(\omega _a^{(0)}) \subset B(x_0,\delta )\) such that
$$\begin{aligned} \Vert \omega ^{(0)}_a \Vert _{L^1} + \Vert \omega ^{(0)}_a\Vert _{L^{\infty }} + \Vert \omega ^{(0)}_a \Vert _{H^1} \ll 1, \end{aligned}$$and
$$\begin{aligned} \sup _{0<t\le T} \Vert D \phi _a(t,\cdot ) \Vert _{L_x^\infty (B(x_0,\delta ))} \gg 1. \end{aligned}$$Here \(\phi _a\) is the flow map associated with the velocity \(u=u_a\) which solves (1.1) with \(\omega ^{(0)}_a\) as vorticity initial data. By translation invariance of Euler it suffices to consider the case \(x_0=0\). In our construction we restrict to some special flows which have odd symmetry and admit the origin as a stagnation point. We prove that the deformation matrix \(D u\) remains essentially hyperbolic near the spatial origin in the short time interval considered (cf. Propositions 3.4 and 3.5).
- Step 2.:
-
Local inflation of the critical norm. As was already mentioned, the critical norm for the vorticity is \(H^1\). The solution constructed in Step 1 does not necessarily obey \(\sup _{0<t\le T} \Vert \nabla \omega _a(t)\Vert _2 \gg 1\). We then perturb the initial data \(\omega ^{(0)}_a\) and take
$$\begin{aligned} \omega ^{(0)}_b = \omega ^{(0)}_a + \frac{1}{k} \sin (k f(x))g(x), \end{aligned}$$where \(k\) is a very large parameter. The function \(g\) is smooth and has \(o(1)\) \(L^2\) norm.Footnote 5 The function \(f(x)\) and the support of \(g\) will be chosen depending on the exact location of the maximum of \(\Vert D \phi _a(t,\cdot )\Vert _{\infty }\). Of course since the initial data is altered, the corresponding characteristic line (flow map) is changed as well. For this we run a perturbation argument in \(W^{1,4}\) so that \(\Vert D\phi _b(t,\cdot )-D \phi _a(t,\cdot )\Vert _{\infty }\ll 1 \). The same argument is used to show that in the main order the \(H^1\) norm of the solution corresponding to \(\omega ^{(0)}_b\) is inflated through the Lagrangian deformation matrix \(D \phi _a\). The technical details are elaborated in Proposition 4.2.
- Step 3.:
-
Gluing of patch solutions. The construction in previous two steps can be repeated in infinitely many small patches which stay away from each other initially. To glue these solutions together we need to differentiate two situations. In the case of Theorem 1.2, we exploit the unboundedness nature of \(\mathbb R^2\) and add each patches sequentially. Each time a new patch is added, we choose the distance between it and the old patches sufficiently large such that their interaction is very small. The key properties exploited here are the finite transport speed of the Euler flow and spatial decay of the Riesz kernel. In the case of Theorem 1.5, we need to deal with compactly supported data. This forces us to analyze in detail the interactions of the patches since the patches can become infinitely close to each other. For each \(n\ge 2\), define \(\omega _{\le n-1}\) the existing patch and \(\omega _n\) the current (to be added) patch. It turns out that there exists a patch time \(T_n\) such that for \(0\le t \le T_n\), the patch \(\omega _n\) has disjoint support from \(\omega _{\le n-1}\), and obeys the dynamics
$$\begin{aligned} \partial _t \omega _n + \Delta ^{-1} \nabla ^{\perp } \omega _{\le n-1} \cdot \nabla \omega _{n} + \Delta ^{-1} \nabla ^{\perp } \omega _n \cdot \nabla \omega _n =0. \end{aligned}$$By a suitable re-definition of the patch center and change of variable, we find that \(\tilde{\omega }_n\) (which is \(\omega _n\) expressed in the new variable) satisfies the equation
$$\begin{aligned}&\partial _t \tilde{\omega }_n + \Delta ^{-1} \nabla ^{\perp } \tilde{\omega }_n \cdot \nabla \tilde{\omega }_n \\&\quad +\, b(t) \begin{pmatrix} -y_1 \\ y_2 \end{pmatrix} \cdot \nabla \tilde{\omega }_n +r(t,y) \cdot \nabla \tilde{\omega }_n=0, \end{aligned}$$where \(b(t)=O(1)\) and \(|r(t,y)| \lesssim |y|^2\). We then choose initial data for \(\omega _n\) such that within patch time \(0<t\le T_n\) the critical norm of \(\omega _n\) inflates rapidly. As we take \(n\rightarrow \infty \), the patch time \(T_n \rightarrow 0\) and \(\omega _n\) becomes more and more localized. Note that the whole solution (consisting of all patches \(\omega _n\)) is actually a time-global solution. During interaction time \(T_n\) the patch \(\omega _n\) produces the desired norm inflation since it stays disjoint from all the other patches. The details of the perturbation analysis can be found in Lemma 6.4 (and some related lemmas in Sect. 6).
- The 3D case.:
-
As was already mentioned, in [1] we settle the 3D case which is technically more involved. To put things into perspective, we briefly explain the main difficulties therein and how to overcome them. Compared with the 2D case, the first difficulty in 3D is the lack of \(L^p\) conservation of the vorticity. It is deeply connected with the vorticity stretching term \((\omega \cdot \nabla ) u\). To simplify the analysis we take the axisymmetric flow without swirl as the basic building block for the whole construction. The vorticity equation in the axisymmetric case takes the form
$$\begin{aligned} \partial _t \left( \frac{\omega }{r} \right) + (u\cdot \nabla ) \left( \frac{\omega }{r} \right) =0, \quad r=\sqrt{x_1^2+x_2^2}, \, x=(x_1,x_2,z). \end{aligned}$$Owing to the denominator \(r\), the solution formula for \(\omega \) then acquires an additional metric factor (compared with 2D) which represents the vorticity stretching effect in the axisymmetric setting. A lot of analysis goes into controlling the metric factor by the large Lagrangian deformation matrix and producing the desired \(H^{3/2}\) norm inflation of vorticity. In our construction the patch solutions which are made of asymmetric without swirl flows typically carry infinite \(\Vert \omega /r \Vert _{L^{3,1}}\) norm (when summing all the patches together). To glue these solutions together in the 3D compactly supported case, we need to run a new perturbation argument which allows to add each new patch \(\omega _n\) with sufficiently small \(\Vert \omega _n\Vert _{\infty }\) norm (over the whole lifespan) such that the effect of the large \(\Vert \omega _n/r \Vert _{L^{3,1}}\) becomes negligible. All in all, the constructed patch solutions converge in the \(C^0\) metric after building several auxiliary lemmas.
We have roughly described the whole strategy of the proof although some technical points could not be elucidated or even mentioned in this short introduction. In some sense our approach is a hybrid of the Lagrangian point of view and the Eulerian one, using in an essential way several features of the Euler dynamics: finite speed propagation and weak interaction between well-separated “patch” solutions. The rest of this paper is organized as follows. In Sect. 2 we set up some basic notations and preliminaries. In Sect. 3 we describe in detail the first part of the local construction for the 2D case. Sect. 4 is devoted to the perturbation argument needed for the 2D local construction step. In Sects. 5 and 6 we treat the 2D noncompact case and compactly supported case separately.
2 Notation and preliminaries
For any two quantities \(X\) and \(Y\), we denote \(X \lesssim Y\) if \(X \le C Y\) for some harmless constant \(C>0\). Similarly \(X \gtrsim Y\) if \(X \ge CY\) for some \(C>0\). We denote \(X \sim Y\) if \(X\lesssim Y\) and \(Y \lesssim X\). We shall write \(X\lesssim _{Z_1,Z_2,\ldots , Z_k} Y\) if \(X \le CY\) and the constant \(C\) depends on the quantities \((Z_1,\ldots , Z_k)\). Similarly we define \(\gtrsim _{Z_1,\ldots , Z_k}\) and \(\sim _{Z_1,\ldots ,Z_k}\).
We shall denote by \(X+\) any quantity of the form \(X+\epsilon \) for any \(\epsilon >0\). For example we shall write
if \(Y\lesssim _{\epsilon } 2^{X+\epsilon }\) for any \(\epsilon >0\). The notation \(X-\) is similarly defined.
For any center \(x_0 \in \mathbb R^d\) and radius \(R>0\), we use \(B(x_0,R) := \{ x \in \mathbb R^d: |x-x_0| < R \}\) to denote the open Euclidean ball. More generally for any set \(A\subset \mathbb R^d\), we denote
For any two sets \(A_1\), \(A_2\subset \mathbb R^d\), we define
For any \(f\) on \(\mathbb R^d\), we denote the Fourier transform of \(f\) as
The inverse Fourier transform of any \(g\) is given by
For any \(1\le p \le \infty \) we use \(\Vert f\Vert _p\), \(\Vert f \Vert _{L^p(\mathbb R^d)}\), or \(\Vert f\Vert _{L^p_x(\mathbb R^d)}\) to denote the usual Lebesgue norm on \(\mathbb R^d\). The Sobolev space \(H^1(\mathbb R^d)\) is defined in the usual way as the completion of \(C_c^{\infty }\) functions under the norm \(\Vert f\Vert _{H^1} = \Vert f\Vert _2 + \Vert \nabla f \Vert _2\). For any \(s\in \mathbb R\), we define the homogeneous Sobolev norm of a tempered distribution \(f:\mathbb R^d\rightarrow \mathbb R\) as
We use the Fourier transform to define the fractional differentiation operators \(|\nabla |^s\) by the formula
For any integer \(n\ge 0\) and any open set \(U\subset \mathbb R^d\), we use the notation \(C^n(U)\) to denote functions on \(U\) whose \(n^{th}\) derivatives are all continuous.
For any \(1\le p<\infty \), we denote by \(L^p_{ul}(\mathbb R^d)\) the Banach space endowed with the norm
Let \(\phi \in C_c^{\infty }(\mathbb R^d)\) be not identically zero. The condition \(u\in L^p_{ul}\) is equivalent to
For any \(s\in \mathbb R\) and any function \(u \in H^s_{loc}(\mathbb R^d)\), one can define
We will need to use the Littlewood–Paley frequency projection operators. Let \(\varphi (\xi )\) be a smooth bump function supported in the ball \(|\xi | \le 2\) and equal to one on the ball \(|\xi | \le 1\). For any real number \(N>0\) and \(f\in \mathcal S^{\prime } (\mathbb R^d)\), define the frequency localized (LP) projection operators:
Similarly we can define \(P_{<N}\), \(P_{\ge N }\), and \(P_{M < \cdot \le N} := P_{\le N} - P_{\le M}\), whenever \(N>M>0\) are real numbers. We will usually use these operators when \(M\) and \(N\) are dyadic numbers. The summation over \(N\) or \(M\) are understood to be over dyadic numbers. Occasionally for convenience of notation we allow \(M\) and \(N\) not to be a power of \(2\).
We recall the following Bernstein estimates: for any \(1\le p\le q\le \infty \), \(s\in \mathbb R\),
For any \(s\in \mathbb R\), \(1\le p,q\le \infty \), we define the homogeneous Besov seminorm as
The inhomogeneous Besov norm \(\Vert f \Vert _{B^{s}_{p,q}}\) of \(f \in \mathcal S^{\prime }(\mathbb R^d)\) is
3 Local construction for 2D case
We begin by describing the choice of initial data for the local construction.
Let \(\varphi _0\in C_c^{\infty }(\mathbb R^2)\) be a radial bump function such that \(\mathrm{supp }(\varphi _0) \subset B(0,1)\) and \(0\le \varphi _0\le 1\). Define
Clearly by definition \(\eta _0\) is odd in \(x_1\), \(x_2\), i.e.
Define for each integer \(k\ge 1\),
Obviously,
so that \(\eta _k\) and \(\eta _l\) have disjoint supports for \(k\ne l\), and
Take any \(A\gg 1\) and define the following one parameter family of functions:
It is easy to check
and
Note that in computing the \(H^1\)-norm above, we have a saving of \(A^{\frac{1}{2}}\) due to the fact that each composing piece \(\eta _k\) has \(O(1)\) \(H^1\)-norm and they have disjoint supports.
We begin with a simple interpolation lemma.
Lemma 3.1
Let \(\mathcal R = \mathcal R_{ij}\) be a Riesz transform on \(\mathbb R^2\), then
Proof
By using the Littlewood-Paley decomposition, splitting into dyadic frequencies and the Bernstein inequality, we have
Choosing \(N_0\in 2^{\mathbb Z}\) such that \(N_0 \sim \bigl ( \frac{\Vert \nabla f \Vert _{\infty }}{\Vert f \Vert _2} \bigr )^{\frac{1}{2}}\) then yields (3.5). \(\square \)
The following lemma gives the estimates of Riesz transforms of compositions with Lipschitz maps on \(\mathbb R^2\) for the functions \(h_A\) defined earlier.
Lemma 3.2
Let \(\phi : \; \mathbb R^2 \rightarrow \mathbb R^2\) be a bi-Lipschitz function satisfying the following conditions:
-
(i)
\(\phi (0)=0\).
-
(ii)
\(\phi =(\phi _1,\phi _2)\) commutes with the reflection map \(\sigma _2(x_1,x_2)=(x_1,-x_2)\), i.e.
$$\begin{aligned}&\phi _1(x_1,-x_2)= \phi _1(x_1,x_2), \\&\phi _2(x_1,-x_2)=-\phi _2(x_1,x_2),\qquad \forall \, x=(x_1,x_2) \in \mathbb R^2. \end{aligned}$$ -
(iii)
For some integer \(n_0 \ge 1\),
$$\begin{aligned} \Vert D\phi \Vert _{\infty } \le 2^{n_0} \quad \text {and } \Vert D (\phi ^{-1})\Vert _{\infty } \le 2^{n_0}. \end{aligned}$$(3.6)Here \(\phi ^{-1}\) denotes the inverse map of \(\phi \). Note that equivalently we can write
$$\begin{aligned} \Vert (D \phi )^{-1} \Vert _{\infty } \le 2^{n_0}, \end{aligned}$$where \((D\phi )^{-1}\) is the matrix inverse of \(D \phi \).
Then with \(\omega =h_A\) defined in (3.4), we have
Here \(C>0\) is an absolute constant. \(\mathcal R_{11}=\Delta ^{-1} \partial _{11}\) and \(\mathcal R_{22}= \Delta ^{-1} \partial _{22}\) are the Riesz transforms.
Remark 3.3
The same result holds if \(\phi \) commutes with the map \(\sigma _1(x_1,x_2)=(-x_1,x_2)\). Note also that in the proof below, we only used the oddness in \(x_2\) of \(h_A\) defined in (3.4).
Proof of Lemma 3.2
First, note that by assumption (ii) on the map \(\phi \), the function \({\eta _k} \circ \phi \) is still odd in \(x_2\). Since \(\mathcal R_{11}\) is an even operator, it follows that \(\mathcal R_{11}({\eta _k} \circ \phi )(0)=0\). (More precisely one just recalls that \(\mathcal R_{11}\) is obtained by convolution with the even kernel \(K(x)= p.v.\left( \frac{1}{2\pi } \cdot \frac{x_2^2-x_1^2}{(x_1^2+x_2^2)^2}\right) +\frac{1}{2} \delta (x)\), and \(\mathcal R_{11}({\eta _k} \circ \phi )(0)= \langle {\eta _k} \circ \phi , K\rangle =0\).)
Now let \(x\in \mathbb R^2 \setminus \{0\}\), \(|x| \sim 2^{-l}\). We evaluate \(\mathcal R_{11} ({\eta _k} \circ \phi )(x)\) by considering \(3\) cases.
Case 1. \(2^k\ll 2^{l-n_0}\). [see (3.6) for the definition of \(n_0\).]
By definition
The integrand in (3.9) vanishes unless \(|\phi (x-y)| \sim 2^{-k}\) [see (3.2)]. By (3.6) and \(\phi (0)=0\), we have
Therefore \(2^{-k-n_0} \lesssim |y| \lesssim 2^{-k+n_0}\). Since \((\eta _k\circ \phi )(y_1,y_2)\) is odd in the \(y_2\) variable, obviously
We then insert the above into (3.9) and compute
Case 2. \(2^k\gg 2^{l+n_0}\).
Again the integrand in (3.9) vanishes unless \(|\phi (x-y)| \sim 2^{-k}\) which yields \(2^{-k+n_0} \gtrsim |x-y| \gtrsim 2^{-k-n_0}\). Since \(2^{-l}\gg 2^{-k+n_0}\) and \(|x| \sim 2^{-l}\), we get \(|y| \sim 2^{-l}\). Therefore
Case 3. \(2^{l-n_0} \lesssim 2^k \lesssim 2^{l+n_0}\).
In this case we use Lemma 3.1. Then by (3.5) and (3.3),
Collecting all the estimates, we then obtain
The bound (3.7) follows from this and the normalizing factor in (3.4). Similarly one can prove (3.8) or just use the identity \(\mathcal R_{11} + \mathcal R_{22}=\mathrm{Id }\). \(\square \)
We are now ready to describe the details of the local construction: namely the existence of large deformation for well-chosen initial data.
To be more specific, we consider the Euler equation
where \(h_A\) is defined in (3.4). Easy to check that \(\omega \) is odd in both \(x_1\) and \(x_2\). We suppress the dependence of the solution \(\omega \) on the parameter \(A\) for simplicity of notation.
The equation for the (forward) characteristic lines takes the form
It is easy to check that \(\phi =\phi (t,x)\) is a symplectic map and \(\phi (t,0)\equiv 0\). Due to the special choice of the initial data \(h_A\), the flow associated with (3.10) and (3.11) is hyperbolic near the origin with a large deformation gradient. The following proposition quantifies this fact.
Proposition 3.4
With the notation in (3.10, 3.11), we have for \(A\) sufficiently large,
where \(M_A=\log \log A\) and \(t_A = 1/\log \log A\).
Proof of Proposition 3.4
We shall argue by contradiction. Assume that
Since \(\mathrm{det }(D\phi )\equiv 1\), it is easy to check that \(\Vert D(\phi ^{-1})\Vert _{\infty }\) has the same bound.
Now by Lemma 3.2, we have
Denote \(D(t) = D(t,\cdot ) =(D\phi )(t,\cdot )\). By (3.11) and (3.14), we have
where \(\lambda (t,x) = (\mathcal R_{12} \omega )(t, \phi (t,x))\), and
Integrating (3.15) in time and noting that \(D(0)=\mathrm{Id }\), we get
Now note that \( |\int _{\tau }^t \lambda | \le |\int _0^t \lambda |+|\int _0^{\tau } \lambda |\le 2\max _{0\le s\le t}| \int _0^s \lambda |. \)
By (3.13, 3.16) and (3.17), we have for all \(0\le t \le t_A\),
where \(C_2>0\) is some absolute constant.
By taking \(A\) sufficiently large and a standard continuity argument, we get
Now denote
where \(\alpha (t,x):= \int _0^t \lambda (\tau ,x) d\tau \) and
From (3.19) we can get more information on the transport map \(\phi =\phi (t,x)\). Indeed for fixed \(t\), using the fact that \(\phi (t,0)\equiv 0\), we have
where
Note that by (3.18), for any \(0\le t \le t_A\),
Since
we have if \(x_1>0\), \(x_2>0\), and
then for \(\phi (t,x)=(\phi _1(t,x),\phi _2(t,x))\), \(0\le t\le t_A\),
By (3.13), we also have
These bounds will be needed later.
Now we analyze \(\lambda (t,\cdot )\) at \(x=0\) to get a contradiction. We have (recall \(\omega (0,x)=h_A(x))\)
In the last step above we have made a change of variable \(x\rightarrow \phi (t,x)\) and used the fact \(\omega (t,\phi (t,x))=\omega (0,x)=h_A(x)\).
To continue, let us observe that the maps \(\phi _1\) and \(\phi _2\) are sign-preserving, i.e. if \(x_1\ge 0\) (resp. \(x_2\ge 0\)) then \(\phi _1\ge 0\) (resp. \(\phi _2\ge 0\)). To check this, one can use (3.11) and the fact that \(\omega \) is odd in \(x_1\) and \(x_2\) to get
which (by integrating in time) yields that \(\text {sign}(\phi _1(t)) = \text {sign}(\phi _1(0)) = \text {sign}(x_1)\).
By using the sign property mentioned above and the parity of our solution, we conclude that the RHS integral of (3.22) is always non-negative and can be restricted to the first quadrant. Hence by (3.20–3.22),we have for all \(0\le t \le t_A\),
Therefore
which obviously contradicts (3.18). \(\square \)
The special initial data \(h_A\) in Proposition 3.4 can be generalized to a slightly larger class of functions. Also the proof of Proposition 3.4 can be simplified if we take full advantage of the odd symmetry of the data. The main observation is that by parity \(x=0\) is invariant under the flow and \((Du)(t,0)\) is diagonal for all \(t>0\). We now state a more general result taking into account all these considerations. The argument below bypasses Lemma 3.2 and is more streamlined and quantitative. In particular the contradiction argument is replaced by a more effective integral (in time) inequality.
Consider
Assume \(g\in C_c^{\infty }(\mathbb R^2)\) satisfies
-
(i)
\(g\) is odd in \(x_1\) and \(x_2\), and
$$\begin{aligned} g(x_1,x_2) \ge 0, \qquad \text {if} \ x_1\ge 0 \hbox { and } x_2\ge 0. \end{aligned}$$ -
(ii)
$$\begin{aligned} \int _{\mathbb R^2} g(x) \frac{x_1 x_2}{|x|^4} dx = B>0. \end{aligned}$$
Denoting by \(\phi =\phi (t,x)\) the (forward) characteristic lines, we have
Proposition 3.5
In particular,
Proof of Proposition 3.5
By parity, we have \(\phi (t,0) \equiv 0\) and
where \(\lambda (t) =(\mathcal R_{12} \omega )(t,0)\). The off-diagonal terms of \(Du\) vanish at \(x=0\) since \(\mathcal R_{11} \omega \) and \(\mathcal R_{22}\omega \) are both odd functions of \(x_1\), \(x_2\). Integrating in time gives
Write \(\phi =(\phi _1,\phi _2)\). By parity it is easy to check \(\phi _1(t,0,x_2)\equiv 0\), \(\phi _2(t,x_1,0)\equiv 0\) for any \(x_1\), \(x_2\in \mathbb R\). By this and sign preservation it follows that for any \(x_1\ge 0\), \(x_2\ge 0\),
Therefore for any \(x_1>0\), \(x_2>0\),
We compute \(\lambda (t)\) as
Since
we get
Equivalently,
Integrating in time, we get
\(\square \)
4 \(\dot{H}^1\) norm inflation by large Lagrangian deformation
We begin with a simple ODE perturbation lemma.
Lemma 4.1
Suppose \(u=u(t,x):\; \mathbb R\times \mathbb R^2 \rightarrow \mathbb R\), \(v=v(t,x):\; \mathbb R \times \mathbb R^2 \rightarrow \mathbb R\) are given smooth vector fields. Let \(\phi _1\), \(\phi _2\) solve respectively
and
Then for some constant \(C=C(\max _{0\le t\le 1} \Vert D^2 u(t) \Vert _{\infty },\, \max _{0\le t \le 1} \Vert Du(t) \Vert _\infty )>0\), we have
where \(C_{1}>0\) is an absolute constant.
Proof of Lemma 4.1
This is quite standard. We sketch the details for the sake of completeness.
Set \(\eta (t,x) = \phi _2(t,x)-\phi _1(t,x)\). Then
A Gronwall in time argument then yields
where the constant \(C=C(\max _{0\le t \le 1} \Vert Du(t) \Vert _{\infty } )\).
Now for \(D \eta \) note that
It is easy to estimate
Hence the desired bound follows from Gronwall. \(\square \)
The following key proposition shows that large deformation of the transportation map can produce large \(\dot{H}^1\) norm, provided we perturb the initial data judiciously.
Proposition 4.2
(Large deformation induces \(\dot{H}^1\) inflation) Suppose \(\omega \) is a smooth solution to the Euler equation
satisfying the following conditions:
-
\(\Vert \omega _0\Vert _{L^1} + \Vert \omega _0 \Vert _{L^{\infty }} + \Vert \omega _0 \Vert _{\dot{H}^{-1}} <\infty \).
-
For some \(z_0\in \mathbb R^2\), \(R_0>0\), we have
$$\begin{aligned} \mathrm{supp }(\omega (t,\cdot ) ) \subset B\left( z_0, \frac{1}{2} R_0\right) ,\quad \forall \, 0\le t\le 1. \end{aligned}$$ -
For some \(0<t_0\le 1\) and some \(M\gg 1\) (\(M\ge 10^{7}\) will suffice), we have
$$\begin{aligned} \Vert (D \phi )(t_0,\cdot ) \Vert _{\infty } >M, \end{aligned}$$(4.1)where \(\phi =\phi (t,x)\) is the (forward) characteristics:
$$\begin{aligned} {\left\{ \begin{array}{ll} \partial _t \phi (t,x) = (\Delta ^{-1} \nabla ^{\perp }\omega )(t,\phi (t,x)), \\ \phi (0,x)=x. \end{array}\right. } \end{aligned}$$
Then we can find a smooth solution \(\tilde{\omega }\) also solving the Euler equation
such that the following hold:
-
(1)
\(\tilde{\omega }_0\) can be bounded in terms of \(\omega _0\):
$$\begin{aligned} \Vert \tilde{\omega }_0 \Vert _{L^1}&\le 2 \Vert \omega _0 \Vert _{L^1}, \end{aligned}$$(4.2)$$\begin{aligned} \Vert \tilde{\omega }_0\Vert _{L^{\infty }}&\le 2 \Vert \omega _0\Vert _{L^{\infty }}, \end{aligned}$$(4.3)$$\begin{aligned} \Vert \tilde{\omega }_0 \Vert _{\dot{H}^{-1}}&\le 2 \Vert \omega _0 \Vert _{\dot{H}^{-1}}, \end{aligned}$$(4.4)$$\begin{aligned} \Vert \tilde{\omega }_0\Vert _{\dot{H}^1}&\le \Vert \omega _0 \Vert _{\dot{H}^1} + M^{-\frac{1}{2}}. \end{aligned}$$(4.5) -
(2)
For the same \(t_0\) as in (4.1), we have
$$\begin{aligned} \Vert \tilde{\omega }(t_0,\cdot ) \Vert _{\dot{H}^1} > M^{\frac{1}{3}}. \end{aligned}$$(4.6) -
(3)
\(\tilde{\omega }\) is also compactly supported:
$$\begin{aligned} \mathrm{supp }(\tilde{\omega }(t) ) \subset B(z_0,\, R_0), \quad \forall \, 0 \le t\le 1. \end{aligned}$$(4.7)
Proof of Proposition 4.2
To simplify the later computation, we begin with a general derivation. Let \(W=W(t,x)\) be a smooth solution to the Euler equation
Denote the associated (forward) characteristics as \(\Phi =\Phi (t,x)\) which solves
Let \(\tilde{\Phi }(t,x)\) be the inverse map of \(\Phi (t,x)\). Then
Differentiating the above gives us
or
where \((D\Phi (t,x))^{-1}\) is the usual matrix inverse.
Since \(\Phi (t)\) is a smooth symplectic map with \(\Phi (0,x)=x\), we have \(\det (D\Phi )=1\). Denote \(\Phi (t,x)=(\Phi _1(t,x),\Phi _2(t,x))\) and recall
Then
Since \(W(t,x)=f(\tilde{\Phi }(t,x))\), we get
where we have performed a measure-preserving change of variables \(x\rightarrow \Phi (t,x)\) and used (4.8).
By (4.9), we can then write (4.10) as
We shall need this formula below.
Now discuss two cases.
Case 1: \(\Vert \omega (t_0,\cdot )\Vert _{\dot{H}^1} >M^{\frac{1}{3}}\). In this case we just set \(\tilde{\omega }= \omega \) and no work is needed.
Case 2: \( \Vert \omega (t_0, \cdot ) \Vert _{\dot{H}^1} \le M^{\frac{1}{3}}\). It is this case which requires a nontrivial analysis. We shall use a perturbation argument.
By (4.1), we can find \(x_*\) such that
Here for a matrix \(A=(a_{ij})\), \(\Vert A\Vert _{\infty } := \max {|a_{ij}|}\).
Denote \(\phi (t_0,x)=(\phi _1(t_0,x),\phi _2(t_0,x))\). Without loss of generality, we may assume one of the entries of \((D\phi )(t_0,x_*)\) is at least \(M\), namely
By continuity we can find \(\delta >0\) sufficiently small such that \(\{ x:\, |x-x_*|\le 2\delta \} \subset B(z_0,\frac{1}{2}R_0)\) and
Now let \(\Phi _0 \in C_c^{\infty } (\mathbb R^2)\) be a radial bump function such that \(0\le \Phi _0(x) \le 1\) for all \(x\in \mathbb R^2\), \(\Phi _0(x)=1\) for \(|x| \le 1\) and \(\Phi _0(x)=0\) for \(|x| \ge 2\). Obviously
Depending on the location of \(x_*\), we need to shrink \(\delta >0\) slightly further if necessary and define an even function \(b \in C_c^{\infty } (\mathbb R^2)\) as follows. If \(x_*=(0,0)\), we just define
If \(x_*=(a_*,0)\) for some \(a_*\ne 0\), then we shrink \(\delta >0\) such that \(\delta \ll |a_*|\) and define
The case \(x_*=(0,a_*)\) for some \(a_*\ne 0\) is similar. Now if \(x_*=(a_*,c_*)\) for some \(a_*\ne 0\) and \(c_*\ne 0\), then we take \(\delta \ll \min \{|a_*|,\,|c_*|\}\) and define
Easy to check that in all cases the function \(b(x)\) defined above is even in \(x_1\), \(x_2\), i.e.
Now introduce the perturbation
and define
We now show that if the parameter \(k>0\) is taken sufficiently large then the corresponding solution \(\tilde{\omega }\) will satisfy all the requirements. In the rest of this proof, to simplify the presentation, we shall use the notation \(X=O(\frac{1}{k^{\alpha }})\) if the quantity \(X\) obeys the bound \(X\le C_1 \cdot \frac{1}{k^{\alpha }}\) and the constant \(C_1\) can depend on \((\omega , M,\Phi _0,\delta , \phi , R_0)\).
Obviously by (4.14), if \(k\) is sufficiently large, then
Similarly we can take \(k\) large such that
For the \(\dot{H}^{-1}\)-norm, note that \(\beta \) is an odd function and \(\hat{\beta }(0) =0\). Thus
if \(k\) is taken sufficiently large.
For the \(\dot{H}^1\)-norm, by (4.13) we have
where we again take \(k\) sufficiently large. Consequently the bound (4.5) follows.
On the other hand, (4.7) follows from the assumption \(\mathrm{supp }(\omega (t,\cdot )) \subset B(z_0, \frac{1}{2} R_0)\) for all \(0\le t\le 1\), and the fact that we can take \(k\) sufficiently large.
It remains to show (4.6). We shall proceed in several steps.
First we shall show
Here the implied constant is independent of \(k\) (but is allowed to depend on other parameters).
By a standard energy estimate, we have
A Gronwall in time argument then yields (4.16) [by (4.14), it is easy to check that the initial data \(\tilde{\omega }_0\) satisfies (4.16)].
Set \(\eta =\omega -\tilde{\omega }\). Then
Therefore noting that \(\mathrm{supp } (\eta (t) ) \subset B(z_0,R_0)\) for any \(0\le t\le 1\), we have
Integrating in time then gives
Interpolating the bound (4.17) with (4.16) [note that \(\omega \) also satisfies the same bound (4.16)], we obtain
where \(\alpha >0\) is some absolute constant.
Denote the forward characteristic lines associated with \(\tilde{\omega }\) as \(\tilde{\phi }(t,x)\) which solves
By Lemma 4.1 and (4.18), we have
Write \(\tilde{\phi }(t,x)=(\tilde{\phi }_1(t,x),\tilde{\phi }_2(t,x))\). By (4.11), we get
where in the last step we used the simple inequality
Since we are in Case 2, we have \(\Vert \omega (t_0, \cdot )\Vert _{\dot{H}^1} \le M^{\frac{1}{3}}\). By (4.11), we get
By our choice of the function \(\beta \) and (4.12), we have
Plugging (4.20) and (4.21) into (4.19), we get
if \(k\) is taken sufficiently large. Clearly (4.6) follows. \(\square \)
5 Local to global: gluing the patches
In this section we prove a general proposition which allows us to glue the local solutions into a global one. We begin with some auxiliary lemmas.
To state the next lemma, we need to fix a sufficiently large constant \(A_1>1\) such that
Note that \(A_1\) is an absolute constant which does not depend on any parameters.
Lemma 5.1
Consider the Euler equation on \(\mathbb R^2\):
Assume \(f\in H^k \cap L^1\) for some \(k\ge 2\), \(g\in H^2 \cap L^1\) and
where \(A_1\) is the same constant as in (5.1).
Then for any \(0\le t\le 1\), the following hold true:
-
(1)
The solution \(\omega (t)\) to (5.2) can be decomposed as
$$\begin{aligned} \omega (t) = \omega _f (t) + \omega _g(t), \end{aligned}$$(5.5)where \(\omega _f(0)=f\), \(\omega _g(0)=g\), and [see (2.2)]
$$\begin{aligned}&\mathrm{supp }(\omega _{f} (t) ) \subset B( \mathrm{supp }(f), \, 2A_1C_1), \\&\mathrm{supp } (\omega _{g}(t) ) \subset B(\mathrm{supp }(g), 2A_1 C_1). \end{aligned}$$ -
(2)
The Sobolev norm of \(\omega _f(t)\) can be bounded in terms of \(\Vert f\Vert _{H^k}\) and \(C_1\) only:
$$\begin{aligned} \max _{0\le t \le 1} \Vert \omega _f (t) \Vert _{H^k} \le C(\Vert f\Vert _{H^k}, C_1)<\infty . \end{aligned}$$(5.6)
Proof of Lemma 5.1
By the transport nature of the equation, the support of the solution \(\omega (t)\) is enlarged at most a distance \(A_1 C_1\) from its original support in unit time. The decomposition (5.5) follows easily from this observation and (5.4). More precisely, \(\omega _f\) and \(\omega _g\) are solutions to the following linear equations:
Here \(u=\Delta ^{-1} \nabla ^{\perp } \omega \). Note that \(\omega _f(t)\) and \(\omega _g(t)\) stay well separated for all \(0\le t\le 1\):
To show (5.6), we note that the equation for \(\omega _f (t)\) can be rewritten as
Note that for any multi-index \(\alpha \), we have
where \(K(\cdot )\) is the kernel function corresponding to the operator \(\Delta ^{-1} \nabla ^{\perp }\).
By (5.7), for any \(x\in \mathrm{supp }(\omega _f(t))\), \(y\in \mathrm{supp }(\omega _g(t))\), we have \(|x-y|\ge 90A_1 C_1\). Therefore we can introduce a smooth cut-off function \(\chi \) on the kernel \(K(\cdot )\) and rewrite (5.9) as
where the modified kernel \(\tilde{K}_{\alpha }\) satisfies
By using \(L^1\) and \(L^{\infty }\) conservation, we have
Therefore by (5.10–5.12) and the Cauchy-Schwartz inequality, we have
The estimate (5.13) shows that the drift term \(\Delta ^{-1} \nabla ^{\perp } \omega _g\) in (5.8) is arbitrarily smooth on the support of \(\omega _f\). Therefore the estimate (5.6) follows from the standard energy estimate. For the sake of completeness we sketch the detail here for \(k=2\). By (5.8), we have

where \(\mathcal R_{ij}\) denotes the Riesz transform. By the usual \(\log \) interpolation inequality and (5.12), we have
Therefore
A \(\log \) Gronwall in time argument then yields (5.6). \(\square \)
Lemma 5.2
Let \(\omega \) and \(\tilde{\omega }\) be solutions to the Euler equations
and
Assume \(f\in H^{3}\cap L^1\), \(g\in H^2 \cap L^1\) and
Assume also \(f\) is compactly supported such that
Then for any \(\epsilon >0\), there exists \(R_{\epsilon } = R_{\epsilon } (\epsilon ,\Vert f\Vert _{H^3}, C_1,C_2)>0\) such that if
then for any \(0<t\le 1\), the following hold true:
-
(1)
\(\omega (t)\) has the decomposition
$$\begin{aligned} \omega (t)=\omega _f(t) + \omega _g(t), \end{aligned}$$(5.15)where
$$\begin{aligned}&\mathrm{supp }(\omega _f (t) ) \subset B( \mathrm{supp }(f),2A_1C_1); \\&\mathrm{supp }(\omega _g(t) ) \subset B( \mathrm{supp }(g), 2A_1C_1) ; \nonumber \\&d(\mathrm{supp }(\omega _f(t), \, \mathrm{supp }(\omega _g(t) ) )\ge 100 A_1C_1. \nonumber \end{aligned}$$(5.16)Here \(A_1\) is the same constant in (5.1).
-
(2)
The support of \(\tilde{\omega }(t)\) also satisfies
$$\begin{aligned} \mathrm{supp } (\tilde{\omega }(t) ) \subset B(\mathrm{supp }(f), 2 A_1 C_1). \end{aligned}$$(5.17) -
(3)
\(\omega _f(t)\) and \(\tilde{\omega }(t)\) are close:
$$\begin{aligned} \max _{0\le t \le 1} \Vert \omega _f(t) -\tilde{\omega }(t) \Vert _{H^2} <\epsilon . \end{aligned}$$(5.18)
Proof of Lemma 5.2
Note that (5.15) and (5.17) follows directly from Lemma 5.1: we just need to take \(R_{\epsilon } \ge 100 A_1 C_1\). By Lemma 5.1, we have
Set \(\eta (t) = \omega _f(t) -\tilde{\omega }(t)\). Then by (5.8), we have
For \(x \in \mathrm{supp } (\omega _f(t))\), we have
Therefore
By Sobolev embedding, (5.14, 5.16, 5.17) and Hölder, we have
By (5.19) and Sobolev embedding we have
Therefore integrating (5.20) in time, we obtain for some \(C_4=C_4(C_1,C_2,C_3)>0\) that
The desired estimate (5.18) follows easily from interpolating (5.19, 5.21) and taking \(R_{\epsilon }\) sufficiently large. \(\square \)
Proposition 5.3
(Almost non-interacting patches) Let \(\{ \omega _j \}_{j=1}^{\infty }\) be a sequence of functions in \(C_c^{\infty } (B(0,1))\) that satisfy the following condition:
Here we may assume \(C_1>1\).
Then there exist centers \(x_j \in \mathbb R^2\) whose mutual distances are sufficiently large (i.e. \(|x_j-x_k|\gg 1\) if \(j\ne k\)) such that the following hold:
-
(1)
Take the initial data
$$\begin{aligned} \omega _0(x) = \sum _{j=1}^{\infty } \omega _j(x-x_j), \end{aligned}$$then \(\omega _0 \in L^1 \cap L^{\infty } \cap H^1 \cap C^{\infty }\). Furthermore for any \(j\ne k\)
$$\begin{aligned} B(x_j, 100A_1C_1) \cap B(x_k, 100 A_1C_1) = \varnothing . \end{aligned}$$(5.23)Here \(A_1\) is the same absolute constant as in (5.1).
-
(2)
With \(\omega _0\) as initial data, there exists a unique solution \(\omega \) to the Euler equation
$$\begin{aligned} \partial _t \omega + \Delta ^{-1} \nabla ^{\perp } \omega \cdot \nabla \omega =0 \end{aligned}$$on the time interval \([0,1]\) satisfying \(\omega \in L^1\cap L^{\infty } \cap C^{\infty }\), \(u=\Delta ^{-1} \nabla ^{\perp } \omega \in C^{\infty }\). Moreover for any \(0\le t \le 1\),
$$\begin{aligned} \mathrm{supp } ( \omega (t,\cdot ) ) \subset \bigcup _{j=1}^{\infty } B(x_j, 3A_1C_1). \end{aligned}$$(5.24) -
(3)
For any \(\epsilon >0\), there exists an integer \(J_{\epsilon }\) sufficiently large such that if \(j\ge J_{\epsilon }\), then
$$\begin{aligned} \max _{0\le t \le 1} \Vert \omega (t,\cdot ) - \tilde{\omega }_j(t,\cdot )\Vert _{H^2(B(x_j,3A_1C_1))} <\epsilon . \end{aligned}$$(5.25)Here \(\tilde{\omega }_j\) is the solution solving the equation
$$\begin{aligned} {\left\{ \begin{array}{ll} \partial _t \tilde{\omega }_j + \Delta ^{-1} \nabla ^{\perp } \tilde{\omega }_j \cdot \nabla \tilde{\omega }_j =0, \quad 0<t\le 1,\, x \in \mathbb R^2; \\ \tilde{\omega }_j(t=0,x)= \omega _j(x-x_j), \quad x \in \mathbb R^2. \end{array}\right. } \end{aligned}$$
Proof of Proposition 5.3
Step 1. Choice of the centers \(x_j\).
For each \(\omega _j\), \(j\ge 1\), we choose \(R_j=R_j(\Vert \omega _j\Vert _{H^3}, C_1) >0\) corresponding to \(f=\omega _j\) and \(\epsilon =2^{-j}\) in Lemma 5.2 [\(C_1\) is the same constant as in (5.22)]. More precisely, if we take
and
with
and
then \(\omega (t) = \omega _f(t) + \omega _g(t)\) with
and
With the numbers \(R_j\) properly defined, we now describe how to choose the centers \(x_j\) inductively. First set \(x_1=0\). For \(j\ge 2\), assume \(x_1\),\(\ldots \),\(x_{j-1}\) have already been chosen. Let
and consider the problems
and
with
By Lemma 5.2, we can find \(\tilde{R}_j = \tilde{R}_j ( \Vert f_{j-1} \Vert _{H^3}, C_1)>0\) such that if
then
We now choose \(x_j\) such that
By induction it is easy to verify that (5.23) holds.
Step 2. Construction of the solution \(\omega (t)\) by patching.
Since \(\omega _0 \in L^{1} \cap L^{\infty }\), the usual Yudovich theory already gives existence and uniqueness of a weak solution in \(L^1 \cap L^{\infty }\). Here thanks to the special type of initial data we shall give a more direct construction which also yields the regularity of the solution at one stroke.
To this end, denote for each \(m\ge 2\)
and let \(\omega ^{(m)} (t,x)\) be the corresponding solution to the Euler equation. Obviously for \(0\le t\le 1\),
Now we define \(\omega (t,x)\) as follows
We now justify that \(\omega (t,x)\) is well-defined and is the desired solution.
Fix \(j_0\ge 1\) and consider the ball \(B(x_{j_0}, 3A_1C_1)\). By (5.29) (setting \(\omega = \omega ^{(m)}\) and \(\tilde{\omega }=\omega ^{(m-1)}\)), we have
By Lemma 5.1, we also have for any \(k\ge 3\),
Thus \((\omega ^{(m)})\) forms a Cauchy sequence in \(H^k( B(x_{j_0}, 3A_1 C_1 ))\) for any \(k\ge 2\) and hence converge to a unique limit \(\omega (t,x) \in C^{\infty } (B(x_{j_0}, 3A_1 C_1))\). Clearly (5.24) holds. Easy to check \(\omega \in L^\infty \).
By using the Lebesgue Dominated Convergence Theorem, we have
Summing in \(j_0\) then gives us \(\omega \in L^1\).
We now show that \(\Delta ^{-1} \nabla ^{\perp } \omega ^{(m)}\) converges locally uniformly to \(\Delta ^{-1} \nabla ^{\perp } \omega \) on \(\bigcup _{j=1}^{\infty } B(x_j, 3A_1C_1)\). By construction we can decompose
where
Also we have
The summation above is actually a finite sum since for each \(x\) there exists at most one \(j\) such that \(\omega _j^{(\infty )}(t,x) \ne 0\).
Now fix \(j_0\ge 1\). Then for \(x \in B(x_{j_0}, 2A_1 C_1)\) and \(m\ge j_0+1\), we have
For (5.32), we use the inequality (5.1) to get
since \(\omega ^{(m)}\) converges uniformly to \(\omega \) on the ball \(B(x_{j_0}, 3 A_1 C_1)\).
For (5.33), note that for \(j\ne j_0\) [see (5.30)]
Therefore by using an estimate similar to (5.10), we have

Similarly
Hence we have shown that \({\Delta ^{-1}\nabla ^{\perp }}\omega ^{(m)} \rightarrow {\Delta ^{-1}\nabla ^{\perp }}\omega \) locally uniformly on compact sets (and also uniformly in \(t\)) as \(m\) tends to infinity. By writing
and sending \(m\) to infinity, we conclude that \(\omega \) is the desired solution on the time interval \([0,1]\).
Finally (5.25) is a simple consequence of Lemma 5.2 and our choice of the centers \(x_j\) [see (5.27)]. \(\square \)
We are now ready to complete the
Proof of Theorem 1.2
For each \(j\ge 2\), we choose (by a slight abuse of notation) \(h_j=h_{A_j}\) according to (3.4) with the parameter \(A_j\) to be taken sufficiently large. Consider the Euler equation
By PropositionFootnote 63.4, we obtain for some \(t_j \in (0, \frac{1}{\log \log A_j})\),
where \(\phi \) is defined in (3.11).
We then use Proposition 4.2 to find \(\tilde{\omega }_j^{(0)} \in C_c^{\infty } (B(0,1))\), \(\tilde{\omega }_j^{(0)}\) odd in both \(x_1\) and \(x_2\), such that
where \(\tilde{\omega }_j(t)\) is the solution to the Euler equation
We then apply Proposition 5.3 to \(\omega _1=\omega _0^{(p)}\), \(\omega _j = \tilde{\omega }_j^{(0)}\) for \(j\ge 2\) and find the centers \(x_j\). Obviously by (5.35) and (5.25), we have
It is not difficult to check the \(\dot{H}^{-1}\) regularity of the constructed solution by using conservation of \(L^2\)-norm of velocity. The theorem is proved. \(\square \)
6 The 2D compactly supported case
Lemma 6.1
(Control of the support) Suppose \(\omega = \omega (t,x)\) is a smooth solution to the following equation:
where \(b_1=b_1(t,x)\), \(b_2=b_2(t,x)\), \(f=f(x)\) are smooth functions satisfying the following conditions:
-
\(\Vert f\Vert _{\infty } \le C_f\) for some constant \(C_f>0\), and
$$\begin{aligned} \mathrm{supp }(f) \subset B(0,R), \quad R>0. \end{aligned}$$ -
\(b_1\), \(b_2\) are incompressible, i.e. \(\nabla \cdot b_1 = \nabla \cdot b_2=0\).
-
For some \(B_1>0\),
$$\begin{aligned} |b_1(t,x)| \le B_1|x|, \quad \forall \, x \in \mathbb R^2. \end{aligned}$$ -
For some \(B_2>0\),
$$\begin{aligned} |b_2(t,x)| \le B_2|x|^2, \quad \forall \, x \in \mathbb R^2. \end{aligned}$$
Then there exists \(R_0=R_0(C_f, B_1,B_2)>0\), \(t_0=t_0(C_f,B_1,B_2)>0\), such that if \(0<R\le R_0\), then
Proof of Lemma 6.1
Define the forward characteristic lines \(\phi =\phi (t,x)\) which solves the ODE
By using the assumptions, we compute
Since both \(b_1\) and \(b_2\) are incompressible, we have
Then by interpolation and \(L^{\infty }\) conservation, we get
where in the last inequality we have used (6.2) and all the implied constants are absolute constants.
Plugging (6.3) into (6.1), we obtain
The desired result then follows from time integration and choosing \(R_0\), \(t_0\) sufficiently small. \(\square \)
For the compactly supported case, we need to use a slight variant of the function \(h_A\) defined in (3.4). We now take any \(A\gg 1\) and
where \(\eta _k\) was defined in (3.1).
It is easy to check that
The main difference between \(g_A\) and \(h_A\) is that the former has weaker dependence on \(A\) in terms of the bounds on higher derivatives. This fact will be used in the perturbation theory later (see Lemma 6.3).
The following is a variant of Proposition 3.4. Note that the additional drift term has a special form which makes the class of odd flows invariant.
Lemma 6.2
Let \(\omega =\omega (t,x)\) be the smooth solution to the equation
where \(g_A\) is defined in (6.4), \(b=b(t,x)\) takes the form
and \(b_0(t)\) is a smooth function satisfying
Let \(\phi =\phi (t,x)\) be the associated forward characteristic line which solves
Then there exists \(A_0=A_0(B_0)>0\) such that if \(A>A_0\), then
Proof of Lemma 6.2
Thanks to the special assumption (6.5), it is easy to check that \(\omega (t,x)\) is still an odd function in \(x_1\) and \(x_2\) for any \(t\). We can then repeat the proof of Proposition 3.4 or use the simplified version as in the proof of Proposition 3.5. We omit the details. \(\square \)
The next lemma shows that the patch dynamics can still be controlled under a suitable perturbation in the drift term. This will play an important role in our later constructions. Since we no longer have odd symmetry at our disposal, we need to carry out a perturbative analysis.
Lemma 6.3
Let \(W =W(t,x)\) be a smooth solution to the equation
where the functions \(g_A\), \(b\), \(r\) satisfies the following conditions:
-
\(g_A\) is the same as defined in (6.4);
-
\(b(t,x)=b_0(t) \left( \begin{array}{l} -x_1 \\ x_2 \end{array}\right) , \quad \Vert b_0\Vert _{\infty } \le B_0<\infty ;\)
-
\(r\) is incompressible and
$$\begin{aligned}&| r(t,x)| \le B_1 \cdot |x|^2, \nonumber \\&|(Dr)(t,x)| \le B_1 \cdot |x|, \nonumber \\&|(D^2 r)(t,x)| \le B_1, \quad \forall \, x \in \mathbb R^2, \, 0\le t\le \frac{1}{\log \log A}. \end{aligned}$$(6.8)Here \(B_1>0\) is a constant.
Let \(\Phi =\Phi (t,x)\) be the characteristic line which solves the ODE
Then there exists \(A_0=A_0(B_0,B_1)>0\) such that if \(A>A_0\), then
Proof of Lemma 6.3
We shall argue by contradiction. Assume (6.10) is not true, then
By the definition of the characteristic line \(\Phi \), we have \(W(t,x)=W_0(\tilde{\Phi }(t,x))\) where \(\tilde{\Phi }\) is the inverse map of \(\Phi \). By (6.11) and using a computation similar to (4.11), we get
We shall need this estimate later.
The main idea is to compare \(W\) with the other solution \(\omega \) which solves the “unperturbed” equation
The perturbation theory requires a bit of work so we shall proceed in several steps.
Step 1. Set \(\eta = W -\omega \). We first show that
Here and below we use the notation \(X+\) as in (2.1). Also to simplify notations we shall write \(\lesssim _{B_1}\) as \(\lesssim \) (i.e. we suppress the notational dependence on \(B_1\)) since \(A\) will be taken sufficiently large.
The equation for \(\eta \) takes the form
By Lemma 6.1 and (6.8), we have
Let \(1<p<2\). By Sobolev embedding and (6.14), we compute
Therefore for \(0\le t \le \frac{1}{\log \log A}\), by using (6.12), we get
This estimate is particularly good for \(p=2-\).
On the other hand, for any \(2\le q<\infty \), a standard energy estimate gives for any \(0\le t \le 1\),
Interpolating the above with (6.15) then yields (6.13) (note that \(\Vert \eta \Vert _{B^0_{\infty ,1}(\mathbb R^2)} \lesssim \Vert \eta \Vert _{L^2(\mathbb R^2)}^{\frac{2}{3}} \Vert \Delta \eta \Vert _{L^\infty (\mathbb R^2)}^{\frac{1}{3}}\)).
Step 2. Let \(\phi \) be the characteristic line associated with the equation for \(\omega \), i.e.
We show that
Set \(Y(t,x) = \Phi (t,x)-\phi (t,x)\). By Lemma 6.1, we only need to consider \(|x| \lesssim 2^{-A}\) sine \(\phi (t,x)=\Phi (t,x)=x\) for \(|x| \gg 2^{-A}\).
Then for \(|x| \lesssim 2^{-A}\),
For \(|x| \lesssim 2^{-A}\) and \(0\le t \le \frac{1}{\log \log A}\), we have \(|\Phi (t,x)| \lesssim 2^{-A}\). By (6.8), we get
Therefore
By using the usual log-interpolation inequality, we have
On the other hand, by (6.13), we have
Plugging these estimates into (6.17) and integrating in time, we obtain
Step 3. Set \(\tilde{J}(t) = (D\Phi ) (t,x)\), \(J(t) = (D\phi )(t,x)\), then obviously
Let \(q=\tilde{J}-J\). Then \(q\) satisfies the equation
By (6.13, 6.16, 6.18), we obtain
Integrating in time and noting \(t\le \frac{1}{\log \log A}\), we obtain (note \(q(0)=0\))
But this obviously contradicts (6.7) and (6.11). \(\square \)
The next lemma is the main building block for our construction in the compactly supported data case.
Lemma 6.4
Suppose \(f_{-1} \in C_c^{\infty } (\mathbb R^2)\) is a given real-valued function such that
-
for some \(R_0>0\),
$$\begin{aligned} \mathrm{supp }(f_{-1}) \subset \{x=(x_1,x_2):\;\; x_1 \le -2R_0 \}; \end{aligned}$$ -
\(f_{-1}\) is an odd function of \(x_2\), i.e.
$$\begin{aligned} f_{-1}(x_1,x_2)= - f_{-1}(x_1,-x_2),\quad \forall \,x \in \mathbb R^2. \end{aligned}$$
Then for any \(0<\epsilon < \frac{R_0}{100}\), one can find \(\delta _0=\delta _0(f_{-1}, \epsilon , R_0)>0\), \(0<t_0=t_0(f_{-1},\epsilon , R_0)<\epsilon \), and \(f_0 \in C_c^{\infty } (B(0,\epsilon ))\) (\(f_0\) depends only on \((f_{-1}, \epsilon , R_0)\)) with the properties:
-
\(f_0\) is an odd function of \(x_2\);
-
$$\begin{aligned} \Vert f_0\Vert _{L^1} + \Vert f_0\Vert _{L^{\infty }} + \Vert f_0\Vert _{H^1} + \Vert f_0\Vert _{\dot{H}^{-1}} \le \epsilon , \end{aligned}$$(6.19)
such that for any \(f_1 \in C_c^{\infty } (\mathbb R^2)\) with
-
\(\mathrm{supp } (f_1) \subset \{ x=(x_1,x_2):\quad x_1\ge R_0\}\);
-
\(\Vert f_1\Vert _{L^1} +\Vert f_1\Vert _{L^{\infty }} \le \delta _0\),
the following hold true:
Consider the Euler equation
then the smooth solution \(\omega =\omega (t,x)\) satisfies the following properties:
-
(1)
for any \(0\le t \le t_0\), we have the decomposition
$$\begin{aligned} \omega (t,x) = \omega _{-1} (t,x) + \omega _0(t,x)+ \omega _1(t,x), \end{aligned}$$(6.20)where
$$\begin{aligned}&\mathrm{supp } (\omega _{-1} (t)) \subset B\left( \mathrm{supp } (f_{-1}), \, \frac{1}{8} R_0\right) ;\\&\mathrm{supp } (\omega _0(t) ) \subset B\left( 0, \epsilon +\frac{1}{8} R_0\right) ;\\&\mathrm{supp } (\omega _1(t)) \subset B\left( \mathrm{supp }\left( f_1, \frac{1}{8} R_0\right) \right) . \end{aligned}$$ -
(2)
\(\Vert \omega _0(t=0,\cdot )\Vert _{H^1} = \Vert f_0\Vert _{H^1} \le \epsilon \), but
$$\begin{aligned} \Vert \omega _0(t_0,\cdot )\Vert _{\dot{H}^1} >\frac{1}{\epsilon }. \end{aligned}$$(6.21)
Proof of Lemma 6.4
The decomposition (6.20) is a simple consequence of finite transportation speed. Therefore we only need to show how to choose \(f_0\) to achieve (6.21) and the other conditions.
Consider first the equation
where \(g_A\) was defined in (6.4) and we shall choose \(A\) sufficiently large.
For \(0\le t \le \frac{1}{\log \log A}\),we decompose the solution \(\omega ^{(1)} (t)\) to (6.22) as
with
Obviously \(\omega _0^{(1)}(t)\) satisfies the equation
Since by assumption \(f_{-1}\) is odd in \(x_2\) and \(g_A\) is also odd in \(x_2\), it is easy to check that both \(\omega _{-1}^{(1)}(t)\) and \(\omega _0^{(1)}(t)\) are odd functions of \(x_2\). Therefore we have
Now let \(\xi (t)\) solve the ODE
Since for \(0\le t \le \frac{1}{\log \log A}\) and \(A\) sufficiently large, the function \(\omega _{-1}^{(1)}\) is supported away from the origin [see (6.23)], it is easy to check that the function \((\Delta ^{-1} \partial _2 \omega _{-1}^{(1)})(t,\cdot )\) is smooth and has uniform (independent of \(A\)) Sobolev bounds in a small neighborhood of the origin. Thus \(\xi (t)\) is well-defined and remains close to the origin for \(t\le \frac{1}{\log \log A}\).
By (6.25), we have
where for \(0\le t\le \frac{1}{\log \log A}\),
By (6.26), we may write the above more compactly as
where
Now we make a change of variable and set
By using (6.27) and the above expressions, we can write (6.24) as
where \(b_0(t)\), \(r(t,y)\) satisfies (6.28).
By Lemma 6.1, we have for \(0\le t \le \frac{1}{\log \log A}\),
Therefore by (6.28) and Lemma 6.3, we have for \(A\) sufficiently large,
were \(\Phi \) is the forward characteristic line associated with \(W_0^{(1)}\) [see (6.9)].
Let \(\phi \) be the characteristic line solving the ODE
Denote by \(\tilde{\Phi }\), \(\tilde{\phi }\) the inverse maps of \(\Phi \) and \(\phi \) respectively. By (6.29), it is easy to check that
Therefore by (6.30),
Now we just need to modify slightly the proof of Proposition 4.2. Note that one can always choose the perturbation \(\beta (x)\) [see (4.14)] to be odd in \(x_1\) and \(x_2\), for example,
Denote by \(\tilde{g}_A\) the perturbed initial data and let \(\tilde{\omega }^{(1)}\) be the solution to
Similar to \(\omega ^{(1)}\) [see (6.22)], we also have the decomposition similar to that in (6.23):
By our choice of perturbation (and taking \(A\) sufficiently large), we have
Let \(f_0=\tilde{g}_A\). We then compare \(\tilde{\omega }^{(1)}\) with \(\omega \) which solves
with \(f_1 \in C_c^{\infty }(\mathbb R^2)\) satisfying
-
\(\mathrm{supp } (f_1) \subset \{x=(x_1,x_2):\quad x_1\ge \frac{1}{2} R_0\}\);
-
\(\Vert f_1\Vert _{L^1} + \Vert f_1\Vert _{L^{\infty }} \le \delta _0\)
and \(\delta _0\) is to be taken sufficiently small.
By an argument similar to the proof of (5.18), we then have [see (6.20) for the definition of \(\omega _0(t)\)]
Therefore (6.21) follows by choosing \(\delta _0\) sufficiently small. \(\square \)
To prove Theorem 1.5 we need the following \(C^0\)-perturbation lemma.
Lemma 6.5
Let \(R_0>0\) and \(f\in C_c^{\infty }(B(0,R_0))\), \(g\in C_c^{\infty }(B(0,R_0))\). Let \(\omega ^a\) and \(\omega \) be smooth solutions to the following 2D Euler equations:
For any \(\epsilon >0\), there exists \(\delta =\delta (\epsilon ,R_0,f)>0\) sufficiently small such that if
then
Proof of Lemma 6.5
By first taking \(\Vert g\Vert _{\infty }\lesssim 1\), we have \(\Vert f+g\Vert _{\infty } \lesssim _{f,R_0} 1\). Since \(\mathrm{supp }(f) \subset B(0,R_0)\) and \(\mathrm{supp }(g) \subset B(0,R_0)\), we get
where \(R_1>0\) is some constant depending on \(R_0\) and \(\Vert f\Vert _{\infty }\) only.
Set \(\eta =\omega ^a-\omega \). Then \(\eta \) satisfies the equation
By a simple energy estimate, we have
On the other hand, since \(\mathrm{supp }(\eta (t,\cdot ) ) \subset B(0,R_1)\) for any \(0\le t\le 1\), we have
By (6.36), we then get for any \(0\le t\le 1\),
A Gronwall argument then yields
Therefore (6.35) follows by choosing \(\Vert g\Vert _{\infty }\) sufficiently small. \(\square \)
We now sketch the proof of Theorem 1.5.
Proof of Theorem 1.5
We begin by noting that the support condition in statement (1) of Theorem 1.5 (“compactly supported in a ball of radius \(\le 1\)”) is rather easy to achieve: one only needs to change the parameters of the distances between the patch solutions in our construction below. Similar comment also applies to the condition “\(\Vert \omega ^{(p)}_0 \Vert _{\dot{H}^1(\mathbb R^2)} + \Vert \omega ^{(p)}_0\Vert _{L^{\infty }(\mathbb R^2)}+\Vert \omega ^{(p)}_0\Vert _{\dot{H}^{-1}(\mathbb R^2)} <\epsilon \)”. Therefore we shall ignore all these conditions below. In particular to simplify notation we will construct \(\omega _0^{(p)}\) of order \(1\). Also without loss of generality we may assume \(\omega _0^{(g)}\) is supported (say) in a ball of radius \(\le \frac{1}{1000}\).
Define \(z_0=(-2,0)\), \(z_1=(0,0)\). For each integer \(j\ge 2\), define
We shall choose \(z_j\), \(j\ge 0\) to be the center of the \(j^{th}\) patch.
Now define \(h_0(x)=\omega _0^{(g)} (x-z_0)\) and \(\delta _0=1\). By Lemma 6.4 with \(f_{-1}=h_0\), \(R_0=\frac{1}{4}\), \(\epsilon = 1/800\), we can find \(\delta _1>0\), \(0<t_1<\frac{1}{2}\), and \(h_1 \in C_c^{\infty } (B(0,\frac{1}{800}))\) with the properties
-
\(h_1\) is an odd function of \(x_2\);
-
\(\Vert h_1 \Vert _{L^1} +\Vert h_1\Vert _{L^{\infty }} + \Vert h_1 \Vert _{H^1} + \Vert h_1 \Vert _{\dot{H}^{-1}} \le \frac{1}{8}\);
such that for any \(\tilde{f} \in C_c^{\infty } (\mathbb R^2)\) with
-
\(\mathrm{supp }(\tilde{f} ) \subset \{ x =(x_1,x_2):\quad x_1\ge \frac{1}{4}\}\);
-
\(\Vert \tilde{f} \Vert _{L^1} + \Vert \tilde{f}\Vert _{L^{\infty }} \le \delta _1\),
the following hold true:
For the Euler equation
the smooth solution \(\omega =\omega (t)\) satisfies:
-
(1)
For any \(0\le t \le t_1\), \(\omega (t)\) can be decomposed as
$$\begin{aligned} \omega (t,x) = \omega _{h_0}(t,x)+\omega _{h_1} (t,x) +\omega _{\tilde{f}}(t,x), \end{aligned}$$where
$$\begin{aligned}&\mathrm{supp } (\omega _{h_0} (t,\cdot ) ) \subset B\left( 0,-2+\frac{1}{32}\right) , \\&\mathrm{supp } (\omega _{h_1} (t,\cdot ) ) \subset B\left( 0,\frac{1}{8}+\frac{1}{32}\right) , \\&\mathrm{supp } (\omega _{\tilde{f}} (t,\cdot )) \subset \left\{ x=(x_1,x_2):\quad x_1\ge \frac{1}{4} -\frac{1}{32} \right\} ; \end{aligned}$$ -
(2)
$$\begin{aligned} \Vert \omega _{h_1} (t_1,\cdot ) \Vert _{\dot{H}^1} >8. \end{aligned}$$
We now inductively assume that for \(1\le i\le j\), we have chosen \(h_i \in C_c^{\infty } (B(z_i, \frac{1}{2^{i+9}} ))\) which is odd in \(x_2\), \(0<t_i<\frac{1}{2^i}\), \(\delta _i>0\), with
such that for any \(\tilde{f} \in C_c^{\infty } (\mathbb R^2)\) with
-
\(\mathrm{supp }(\tilde{f}) \subset \{ x=(x_1,x_2):\quad x_1 \ge z_{i+1}^{(1)} -\frac{1}{2^i}\}\) [see (6.37)] for the definition of \(z_j^{(1)}\));
-
\(\Vert \tilde{f} \Vert _{L^1} +\Vert \tilde{f} \Vert _{L^{\infty }} \le \delta _i\),
the solution \(\omega (t)\) to the equation
satisfies the properties:
-
(1)
for any \(0\le t \le t_i\), we have the decomposition
$$\begin{aligned} \omega (t,x) = \omega _{\le i-1} (t,x) + \omega _i(t,x) + \omega _{\tilde{f} }(t,x), \end{aligned}$$(6.39)where
$$\begin{aligned}&\mathrm{supp } (\omega _{\le i-1} (t,\cdot )) \subset \left\{ x=(x_1,x_2):\quad x_1 \le z_{i-1}^{(1)}+\frac{1}{2^{i}} \right\} ; \\&\mathrm{supp } ( \omega _{i} (t,\cdot ) ) \subset \left\{ x=(x_1,x_2): \quad |x-z_i| \le \frac{1}{2^i} \right\} ; \\&\mathrm{supp } (\omega _{\tilde{f}} (t,\cdot ) ) \subset \left\{ x=(x_1,x_2): \quad x_1 \ge z_{i+1}^{(1)}-\frac{1}{2^i} \right\} ; \end{aligned}$$ -
(2)
\(\Vert \omega _i(t_i,\cdot ) \Vert _{\dot{H}^1} >2^i\).
Then for \(i=j+1\), by shifting the coordinate axis to \(z_{j+1}\) if necessary, we can apply Lemma 6.4 with \(f_{-1} = \sum _{i=0}^j h_i\), \(\epsilon \ll \frac{1}{2^{i+1}} \min _{0\le k\le i} \delta _k\), and choose \(h_{j+1} \in C_c^{\infty } (B(z_{j+1}, \frac{1}{2^{j+9}} ))\) to satisfy all the needed properties similar to the \(i^{th}\) step. This way we have completely specified the profiles of all \(h_j\), \(j=0,1,2,\ldots \).
Now we define the initial data
It is easy to check that \(\omega _0\) is compactly supported and \(\omega _0 \in L^{\infty } \cap \dot{H}^{-1} \cap H^1\). Denote the approximating initial data
and let \(\omega ^{(J)}\) be the solution to the Euler equation
By using \(L^p\), \(1\le p\le \infty \) conservation of vorticity, \(L^2\) conservation of velocity, it is easy to check that
Furthermore by Lemma 6.5, we canFootnote 7 guarantee that
Note that by (6.41) we can always guarantee for some constant \(R>0\) that
We then view \((\omega ^{(J)})_{J\ge 1}\) as a Cauchy sequence in the Banach space \(C_t^0 C_x^0 ([0,1]\times \overline{B(0,R)})\) and extract the limit solution \(\omega \) in the same space. By interpolation and Sobolev embedding, it is easy to check that \(u^{(J)}=\Delta ^{-1} \nabla ^{\perp } \omega ^{(J)}\) also forms a Cauchy sequence in \(C_t^0 L_x^2 \cap C_t^0 C_x^{\alpha } ([0,1]\times \mathbb R^2)\) for any \(0<\alpha <1\). Therefore \(u^{(J)}\) converges to the limit \(u=\Delta ^{-1} \nabla ^{\perp } \omega \) and \(\omega \) is the desired solution.
Set \(x_*= \lim _{j\rightarrow \infty } z_j = (100,0)\). We now prove statement (3) and (4) in Theorem 1.5. Fix any integer \(n\ge 2\) and we choose \(t_n<\frac{1}{2^n}\) in the same way as specified in (6.38). By our way of construction, the fact that \((\omega ^{(J)})\) is Cauchy in \(C^0\) and (a version of) Lemma 5.1, we have that the limit solution \(\omega \) obeys a decomposition similar to that in (6.39). More precisely define \(t_n^2=t_n\), then for any \(0\le t \le t_n^2\), we have
where \(\omega _{<n}(t,\cdot ) \in C^{\infty }_c(\Omega _{<n})\), \(\omega _n(t,\cdot ) \in C_c^{\infty }(\Omega _n)\), and
Furthermore we can choose \(t_n^1<t_n^2\) (\(t_n^1\) is sufficiently close to \(t_n^2\)) such that
Therefore statement (4) in Theorem 1.5 is proved. Now for statement (3) we discuss two cases. If \(x=(x_1,x_2) \ne x_*=(100,0)\) and \(x_1\ge 100\), then by using finite transportation speed we can find a neighborhood \(N_x\) of \(x\) and \(t_x>0\) sufficiently small such that \(\omega (t,y)=0\) for any \(0\le t\le t_x\) and \(y \in N_x\). Similarly we can treat the case \(x=(x_1,x_2)\), \(x_1<100\) and \(|x|>500\). On the other hand if \(x=(x_1,x_2)\) and \(x_1<100\) with \(|x|\le 500\), then we can find \(n\) sufficiently large such that \(x \in \Omega _{<n}\). Obviously we just need to define \(N_x=\Omega _{<n}\) and \(t_x=t_n^2\) so that \(\omega (t,\cdot ) \in C^{\infty } (N_x)\) for all \(0\le t\le t_x\). \(\square \)
Notes
Counter examples for the case \(s<d/p+1\) was also considered therein.
Similar results also hold for vorticity functions which are odd in \(x_1\), or odd in both \(x_1\) and \(x_2\).
Actually it is easy to show that \(u\) is log-Lipschitz.
In the actual perturbation argument, we need to divide it by a suitable power of \(\Vert D \phi \Vert _{\infty }\).
Note that the perturbation \(\beta (x)\) therein can be chosen to be odd in \(x_1\) and \(x_2\).
One needs to inductively shrink the \(\delta _i\) further (so that Lemma 6.5 can be applied) and re-choose the profiles \(h_j\) if necessary.
References
Bourgain, J., Li, D.: Strong ill-posedness of the 3D incomressible Euler equation in borderline spaces. Preprint
Bourgain, J., Li, D.: On an endpoint Kato-Ponce inequality. Differ Integral Equ 27(11/12), 1037–1072 (2014)
Bardos, C., Titi, E.: Loss of smoothness and energy conserving rough weak solutions for the \(3d\) Euler equations. Discret. Contin. Dyn. Syst. Ser. S 3(2), 185–197 (2010)
Beale, J.T., Kato, T., Majda, A.: Remarks on the breakdown of smooth solutions for the 3D Euler equations. Comm. Math. Phys. 94, 61–66 (1984)
Bourguignon, J.P., Brezis, H.: Remarks on the Euler equation. J. Func. Anal. 15, 341–363 (1974)
Chemin, J.-Y.: Perfect incompressible fluids. Clarendon press, Oxford (1998)
Chae, D.: Local existence and blow-up criterion for the Euler equations in the Besov spaces. Asymptot. Anal. 38(3–4), 339–358 (2004)
Constantin, P.: On the Euler equations of incompressible fluids. Bull. Amer. Math. Soc. N.S. 44(4), 603–621 (2007).
Chae, D., Wu, J.: Logarithmically regularized inviscid models in the borderline Sobolev spaces. J. Math. Phys. 53(11), 115601 (2012)
Cheskidov, A., Shvydkoy, R.: Ill-posedness of the basic equations of fluid dynamics in Besov spaces. Proc. Amer. Math. Soc. 138(3), 1059–1067 (2010)
Dong, H., Li, D.: Global \(\dot{H}^1 \cap \dot{H}^{-1}\) solutions to a logarithmically regularized 2D Euler equation, J. Math. Fluid Mech., in press, arXiv:1210.0605 [math.AP] 2 Oct 2012
Ebin, D., Marsden, J.: Groups of diffeomorphisms and the motion of an incompressible fluid. Ann. Math. 92(2), 102–163 (1970)
DiPerna, R., Majda, A.: Oscillations and concentrations in weak solutions of the incompressible fluid equations. Comm. Math. Phys. 108(4), 667–689 (1987)
Grafakos, L., Maldonado, D., Naibo, V.: A remark on an end-point Kato-Ponce inequality. Differ. Integral Equ. 27(5–6), 415–424 (2014)
Gunther, N., On the motion of fluid in a moving container, Izvestia Akad. Nauk USSR, Ser. Fiz. Mat., vol. 20, 1927, pp. 1323–1348, 1503–1532; vol. 21, 1927, pp. 521–526, 735–756; vol. 22, 1928, pp. 9–30
Himonas, A.A., Misiołek, G.: Non-uniform dependence on initial data of solutions to the Euler equations of hydrodynamics. Comm. Math. Phys. 296(1), 285–301 (2010)
Inci, H.: On the well-posedness of the incompressible Euler equation. arXiv: 1301.5997
Kato, T.: Nonstationary flows of viscous and ideal fluids in \(\mathbb{R}^3\). J. Func. Anal. 9, 296–305 (1972)
Kato, T.: The Cauchy problem for quasi-linear symmetric hyperbolic systems. Arch. Ration. Mech. Anal. 58(3), 181–205 (1975)
Kato, T., Ponce, G.: Commutator estimates and the Euler and Navier-Stokes equations. Comm. Pure Appl. Math. 41(7), 891–907 (1988)
Lichtenstein, L.: Üer einige Existenzprobleme der Hydrodynamik homogenerun-zusammendrück barer, reibungsloser Flüßbigkeiten und die Helmgoltzschen Wirbelsatze, Math. Z., vol. 23, 1925, pp. 89–154; vol. 26, 1927, pp. 196–323; vol. 28, 1928, pp. 387–415; vol. 32, 1930, pp. 608–725
Lions, P.L.: Mathematical topics in fluid mechanics. Volume 1. Incompressible models’. Oxford lecture series in mathematics and its applications. The Clarendon Press, Oxford University Press, New York, (1996)
Majda, A., Bertozzi, A.: Vorticity and incompressible flow, Cambridge Texts in Applied Mathematics, 27. Cambridge University Press, Cambridge (2002)
Misiołek, G., Yoneda, T.: Ill-posedness examples for the quasi-geostrophic and the Euler equations. Analysis, geometry and quantum field theory, 251–258, Contemp. Math. 584, Am. Math. Soc., Providence, RI, (2012)
Pak, H.C., Park, Y.J.: Existence of solution for the Euler equations in a critical Besov space \(B^1_{\infty,1}(\mathbb{R}^d)\). Comm. Part. Differ. Equ. 29(7–8), 1149–1166 (2004)
Takada, R.: Counterexamples of commutator estimates in the Besov and the Triebel-Lizorkin spaces related to the Euler equations. SIAM J. Math. Anal. 42(6), 2473–2483 (2010)
Vishik, M.: Hydrodynamics in Besov spaces. Arch. Rat. Mech. Anal. 145, 197–214 (1998)
Vishik, M.: Incompressible flows of an ideal fluid with vorticity in borderline spaces of Besov type. Ann. Sci. École Norm. Sup. (4) 32(6), 769–812 (1999)
Wolibner, W.: Un theorème sur l’existence du mouvement plan d’un fluide parfait, homogène, incompressible, pendant un temps infiniment long. Math. Z. 37(1), 698–726 (1933)
Yudovich, V.: Nonstationary flow of an ideal incompressible liquid. Zh. Vych. Mat. 3, 1032–1066 (1963)
Yudovich, V.: Uniqueness theorem for the basic nonstationary problem in the dynamics of an ideal incompressible fluid. Math. Res. Lett. 2, 27–38 (1995)
Acknowledgments
We thank the anonymous referees for very helpful suggestions. J. Bourgain was supported in part by NSF No. 1301619. D. Li was supported in part by NSF under agreement No. DMS-1128155. D. Li was also supported by an Nserc discovery grant. The first author thanks the UC Berkeley math department, where part of the work was done, for its hospitality. The second author thanks the Institute for Advanced Study for its hospitality and providing excellent work conditions.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bourgain, J., Li, D. Strong ill-posedness of the incompressible Euler equation in borderline Sobolev spaces. Invent. math. 201, 97–157 (2015). https://doi.org/10.1007/s00222-014-0548-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00222-014-0548-6