
Abstract
The ability to modulate the mechanical properties of our limbs contributes to our ability to interact with the physical world in a consistent and predictable manner. An individual joint’s contributions to whole limb mechanics can be quantified by its joint impedance, which characterizes the torque generated about a joint in response to external perturbations of position. A number of studies have estimated joint impedance during movement and have shown that it can be much lower than it is during posture. However, the mechanisms contributing to these differences remain unknown partly because conditions known to affect impedance, including muscle activation and joint angles, have not been carefully controlled across studies. The goal of this study was to contrast knee impedance during continuous volitional movements with that during maintained postures spanning a similar range of joint angles and muscle activations and to explore physiological mechanisms likely to contribute to the observed differences. We found that knee impedance was substantially lower during movement than during matched postural tasks, even for matched muscle activations. At times, the impedance during movement was even lower than that measured during isometric tasks with no volitional muscle activity. These decreases in impedance could be attributed in part to reduced stretch reflexes during movement and to an effect of movement itself on reducing knee impedance.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The ability to modulate the mechanical properties of our limbs contributes to our ability to interact with the physical world in a consistent and predictable manner, helping us move seamlessly across varied terrains and interact reliably with different objects and surfaces. Understanding how limb mechanics are regulated during natural behaviors is critical for understanding the source of our abilities, how they are compromised following injury, and how they may be replicated in artificial systems designed to mimic natural human behaviors. While there have been many studies on the regulation of joint mechanics during postural tasks, less is known about how they are regulated during movement, though there are many reasons to believe that there are fundamental differences between the control of joint mechanics during movement and posture. The purpose of this study was to quantify these differences and to examine the mechanisms contributing to them.
The mechanical properties of a joint can be quantified by its impedance, which is the dynamic relationship between perturbations of joint position and the torques generated in response (Hogan 1984; Kearney and Hunter 1990). During steady-state isometric conditions, joint impedance is known to vary with the resting position of the joint, and to increase in direct proportion with the activation of muscles spanning the joint or the associated torques generated by those muscles. In contrast to the many studies examining steady-state isometric conditions, there have been relatively few quantifications of joint impedance during movement, and even fewer during volitional movements. A few studies that have estimated impedance during volitional movements of individual joints showed that the impedance during movement can be much lower than during postural conditions (Bennett et al. 1992; Popescu et al. 2003; Rouse et al. 2012), though direct comparisons to isometric tasks with similar muscle activity were not performed. These findings have been extended to multi-joint movements, where it also has been demonstrated that impedance can be lower than in similar postural tasks (Gomi and Kawato 1996, 1997).
Many mechanisms contribute to the impedance of a joint, and changes in the behavior of these mechanisms between posture and movement could contribute to the results described above. The passive properties of a joint, including ligaments, tendons, and joint capsular structures all contribute to the net mechanical properties. It has been reported that the mechanical properties of these structures change with repeated movements (Wiegner 1987; Maganaris and Paul 2000). The mechanical properties of passive muscles are also known to change with imposed movements (Lakie and Robson 1988), which can break the bonds of weakly bound cross-bridges (Whitehead et al. 2001), thereby reducing muscle contributions to joint mechanics. Muscle stiffness, the static component of impedance, increases in direct proportion to activation (Morgan 1977; Hoffer and Andreassen 1981), presumably due to the increased probability of cross-bridge attachment. This allows joint stiffness to be predicted accurately as long as the forces generated by the muscles crossing the joint can be estimated with reasonable fidelity (Lloyd and Besier 2003; Barrett et al. 2007; Hu et al. 2011), though these predictions have not been extended to volitional movements driven by changes in muscle activation. Finally, there is much evidence that stretch reflexes can contribute to muscle and joint impedance (Mrachacz-Kersting and Sinkjaer 2003; Ludvig et al. 2007). Reflexes are known to change across tasks (Brooke et al. 1991; Ludvig et al. 2007; Forbes et al. 2011), and some have been reported to be reduced or otherwise altered during movement (Yang et al. 1991; Brooke et al. 1993; Sinkjaer et al. 1996; Kearney et al. 1999; Grey et al. 2001). Presently, however, it is unknown which, if any, of these mechanisms contribute to the changing mechanical properties of an intact joint during volitional movements.
The objective of this study was to contrast joint impedance estimated during volitional movements with that estimated during similar isometric conditions and to examine the mechanisms contributing to any observed differences. Previous studies have shown that impedance is lower during volitional movements than postural tasks, though direct comparisons to isometric conditions with similar muscle activations were not conducted. Here we make those comparisons to determine if muscle activation alone can explain the differences between movement and posture or if more complex mechanisms are involved. Our primary hypothesis was that knee impedance during volitional movements would be lower than that during the maintenance of posture for similar levels of muscle activity. This was tested by quantifying knee impedance during voluntary cyclical movements, during isometric conditions at matched levels of joint torque and through a similar range of joint positions. Imposed cyclical movements were used to dissociate the influence of movement from the changes in muscle activation that occur during voluntary movement. Finally, the reflex contributions to the impedance were assessed by quantifying the perturbation-induced changes in muscle activity. Our results support previous observations that there are fundamental differences between the regulation of joint mechanics during posture and movement and provide some insight into the mechanisms that do and do not contribute to those behaviors.
Portions of this work have previously been presented in abstract form (Ludvig and Perreault 2014b).
Methods
Subjects
Thirteen subjects (9 males and 4 females) ranging in age from 23 to 33 years participated in one or multiple experimental sessions. All subjects gave informed consent to the experimental protocol, which was approved by Northwestern University’s Institutional Review Board.
Apparatus
Subjects’ right legs were attached to a brushless AC rotary servomotor (BSM90N-3150AF, Baldor, Fort Smith, AR, USA) via a custom-made fiberglass or thermoplastic cast (Fig. 1). The knee was aligned with the center of rotation of the motor, allowing for only flexion and extension of the knee. The upper portion of the right leg was immobilized by tightly securing a strap around the thigh and the torso was immobilized with straps across the shoulder and body. Two safety stops, one electric and one mechanical were placed at either end of the subjects’ range of motion. Subjects’ knee positions were measured using an encoder integrated with the motor and the forces and torques about the knee were measured using a 6 degree-of-freedom load cell (45E15A4, JR3, Woodland, CA, USA). The load cell was located at the end of a crank arm, at a distance of 0.25 m from the flexion/extension axis of the knee. An admittance control scheme was used to control the motor positions, so that different environmental loads could be simulated, as described in the “Protocols” section below.

Schematic of experimental apparatus
Electromyographic (EMG) activity was measured from two knee extensor muscles—rectus femoris (RF) and vastus lateralis (VL)—and three knee flexor muscles—biceps femoris (BF), semitendinosus (ST), and lateral gastrocnemius (LG)—using bipolar surface electrodes (Noraxon 272, Scottsdale, AZ, USA). These signals were amplified (APE-500 and AMT-8, Bortec, Calgary, AB) as needed to maximize the range of the data acquisition system.
All analog data were anti-alias filtered at 500 Hz using a 5-pole Bessel filter and then sampled at 2.5 kHz (PCI-DAS1602/16, Measurement Computing, Norton, MA, USA). Position data were recorded synchronously using a 24-bit quadrature encoder card (PCI-QUAD04, Measurement Computing, Norton, MA, USA). All data acquisition and motor control were performed using xPC target (The Mathworks Inc., Natick, MA, USA).
Protocols
Two experiments were conducted. Twelve of the 13 participants completed the primary experiment and three completed the secondary. Each session began with maximum voluntary contractions (MVCs) in the knee flexion and extension direction. These were used to quantify the maximum strength of each subject and to obtain data for subsequent normalization of all EMG measurements.
The primary experiment was designed to measure knee impedance during self-generated movements and matched isometric conditions. The motor controller was configured to behave as a lightly damped second-order system for all data collection in this experiment. The parameters of the simulated system included a spring stiffness of 98.7 Nm/rad, a viscosity of 5 Nm/rad/s, and an inertia of 10 kg m2. The set point or rest length of the virtual spring was set such that no forces acted on the leg when it was hanging in the vertical position. These parameters, coupled with the inertia of the leg, resulted in a coupled system with a resonant frequency of approximately 0.5 Hz. Subjects were instructed to oscillate their legs between ±0.15 rad at a comfortable rate, which was typically close to the designed resonant frequency. They were assisted by visual feedback of knee angle and the desired trajectory, displayed on a monitor placed directly in front of the subject. Subjects completed six trials, each lasting for 180 s; the first trial was a practice session. The remaining five trials were used to estimate knee impedance. Hence, a small displacement perturbation with an amplitude of 0.06 rad was superimposed on the volitional movement. The perturbation was generated using a pseudo-random binary sequence (PRBS) with a switching time of 0.15 s.
Knee impedance was also estimated during isometric conditions. These data were collected from all subjects who participated in the first experimental session, though two subjects performed these isometric trials in a separate session, and thus had new EMG electrodes placed. One of these two subjects had EMGs of similar magnitude in the two sessions, while the other’s EMG varied greatly, so no direct EMG comparison between the movement and isometric tasks was performed on this subject. Data were collected at five joint angles, equally spaced across the range encountered during the movement trials. A single trial was collected at each of these five joint angles. Each trial lasted for 65 s, during which PRBS position perturbations were applied to the knee; these perturbations had characteristics identical to those used for the voluntary movement experiments. A constant bias torque was added so that the net torque produced by the subject during these isometric measurements was matched to that generated at the same joint angle during the movement conditions; these bias torques were customized for each subject and each joint angle. Finally, a measure of passive impedance was obtained for each subject with the limb in the neutral position, hanging vertically, and the subject instructed to relax all muscles.
The second experiment was designed to quantify the influence of imposed rather than volitional movements on the impedance of the knee. Subjects were instructed to remain relaxed during these experiments, while the rotary motor, configured as a stiff position servo, imposed sinusoidal movements spanning the same range as the volitional movements from the first experiment. The imposed movements had an amplitude of 0.15 rad. Four different movement frequencies were tested (0.2, 0.5, 1.0 and 2.0 Hz) to determine if movement speed influenced the observed results. Between 2 and 10 trials were collected at each frequency, as needed to ensure that at least 360 complete cycles were obtained. This number was chosen to result in a comparable data set to that collected in the volitional movement experiment. As in the first experiment, the results from these movement trials were compared to isometric measurements, also made during passive conditions. Seven isometric trials were completed, equally spaced between −0.15 and 0.15 rad.
Analysis
Alignment of data
Accurately estimating knee impedance using multiple realizations of a movement requires that the movement profiles be accurately aligned. This was challenging for the self-generated movements from the first experiment, as subjects were free to move at their own pace and this pace varied slightly over the course of the 180-s trial. To counter this challenge, we used a multiple-step alignment procedure (Fig. 2). Initially, each 180-s perturbation trial was segmented into overlapping three-period segments by finding the times the knee position crossed zero. Segments from the five perturbation trials were combined into a single ensemble of data. Each segment was then aligned to a target sine wave whose amplitude and frequency were computed using the amplitude and the time interval between the minimum and maximum of the average knee position. Since knee impedance was quantified at every time point throughout the movement, the data were re-aligned at every time point prior to estimation of knee impedance. This alignment was done by finding a time-shift (T) that minimized the squared error between the actual knee position (x) and the target sine wave (x t) over a window of ±0.25 s (J1, J2), approximately 25% of a full cycle, centered over the time point of interest,

a Raw position, torque, and perturbation signals, along with admittance position (the position with the perturbation removed) for 15-s snippet of a single volitional movement trial. b Outline of segmentation and alignment procedure: data were segmented into overlapping three-period segments, aligned at each time point, and outliers removed
This alignment was done for all segments (r) at all time points (t). This time-shift, at which the minimum squared error occurred, was determined over a range (τ1, τ2) of time-shifts of ±1 s, though shifts near the extremes of this range were rarely encountered. No time-dilations or contractions were performed to the data, only shifting each segment within the ensemble. The average shift across all subjects, segments and time points was 0.03 ± 0.12 s (mean ± standard deviation).
In addition to shifting each segment at each time point, only those that most closely resembled the reference sine wave were used for further analyses. This was accomplished using two criteria. The first involved excluding all three-period segments that had amplitudes in the lowest or highest deciles; this excluded segments during which the subjects moved too much or too little. The second involved examining the squared error of the difference between each segment and the reference waveform after the alignment was performed at each time point. Only the 80% of the segments with the lowest error were kept. A segment needed to meet both criteria for inclusion in the system identification process. On average, these criteria eliminated 31 ± 2% (mean ± standard deviation) of the segments across all subjects tested.
A simplified one-step segmentation and alignment process was used for the imposed movements of the second experiment since they contained no cycle–cycle variability. The 180-s trials were segmented into overlapping three-period-long segments, where each segment started one period after the previous. The segments from all the trials performed at the same frequency were combined into a single ensemble.
Estimation of knee impedance
Knee impedance was estimated from the aligned ensemble of position and torque traces using a modified version of a multi-segment algorithm described previously (Ludvig and Perreault 2012). After alignment but prior to estimation, the data were filtered forward and backward, to prevent any phase lags, with a 40-Hz 8-pole Chebyshev filter and then decimated to 100 Hz. Then the ensemble mean of both the position and torque were removed to emphasize the perturbation-elicited responses. The multi-segment algorithm was then used to compute the time-varying impulse response function (IRF) at each time point within the cyclical movement. Each time-varying impulse response was generated using a 200-ms window of data centered on the time point of interest. This length was chosen as it was much shorter (10 times) than the period of movement, ensuring that the time-varying changes in impedance were captured, and making the windows any smaller was found not to change the pattern of the time-varying behavior. The impulse response functions were two sided (Westwick and Perreault 2012) with a maximum lag of ±120 ms. Because the motor was compliant in the volitional movement trials, the multi-segment algorithm was modified to operate on closed-loop systems (Kearney and Hunter 1990). This was accomplished using an instrumental variable approach (de Vlugt et al. 2003) that considers the commanded perturbation, which is not influenced by the compliance of the motor, as well as the measured joint displacements and torques. Joint stiffness, which is the steady-state gain of the impedance, is reported in the “Results” section due to its significance to the control of posture and movement (Kearney and Hunter 1990). This was computed by integrating the nonparametric impedance IRFs (Ludvig and Perreault 2012). For comparison between subjects, stiffness was normalized by dividing the stiffness during the movement task with the stiffness measured during the passive relaxed trial.
Confidence intervals for stiffness estimates were generated using a bootstrap approach. A new random ensemble of segments with the same size as the original ensemble was created by randomly reselecting, with replacement, the segments from the original ensemble of segments. The stiffness was computed at all times with this new ensemble of randomly reselected segments as was done with the original ensemble. This process was repeated 100 times, resulting in a distribution of stiffness estimates at each time point.
For the data from the second session, impedance was estimated in a similar manner with one small difference. Since the motor was in position control, there was no need to use an algorithm modified to work for closed-loop systems, thus the algorithm as described by Ludvig and Perreault (2012) was used without modification.
EMG analysis
The mean was subtracted from all EMG signals prior to rectification. These signals were then normalized by the mean rectified value recorded during the maximum voluntary contractions of each muscle performed at the start of each experiment. EMG data were examined for two purposes: (1) to examine how impedance changed with muscle activity and (2) to investigate if changes in stretch reflexes contributed to any observed differences between the impedance estimated during movement and posture. Hence, we analyzed the EMG data in two ways: (1) ensemble averaging the time-shifted and aligned EMG activity and (2) averaging the EMG activity produced in response to each rising and falling edge of the PRBS perturbations. The first method provided a measure of the overall EMG throughout the cyclic movement. The second method allowed the perturbation-evoked changes in EMG to be quantified throughout the cyclic trajectories as well as for the isometric conditions. For the perturbation-elicited responses, background EMG was defined as the average EMG activity from 40 ms prior to the perturbation and reflex activity was defined as the average of activity from 30 to 60 ms following the onset of the perturbation. This time was selected since longer latency responses were not observed, as previously reported for perturbations with high accelerations, as used in this study (Finley et al. 2013).
Statistical analysis
Statistical analyses were run to compare the stiffness and EMG recordings during movement to those during static postural conditions. All statistical tests were performed in Matlab (The Mathworks Inc., Natick, MA, USA) using a significance level of 5%. To enhance clarity, details of each statistical test are presented with the accompanying result. All confidence intervals provided in the text and figures represent standard errors unless otherwise noted.
Results
Estimation of time-varying impedance
Knee impedance was well modeled by the time-varying IRFs. An example of this can be seen in Fig. 3a, which shows the measured and predicted torque for a single 4-s segment from one subject. In this example, the predicted torque accounts for 98% of the variance of the measured torque. However, knee impedance varies with time, thus it is more appropriate to characterize the quality of the model as function of time. Figure 3b shows five example segments for one time point, along with the IRF estimated for that time point. At this time point, the IRF accounted for 97% of the measured torque variance of all segments (there were 293 segments used at this time point with this subject). Computing an IRF at all time points recorded from this subject leads to the time-varying IRF shown in Fig. 3c. The percentage of variance accounted for (%VAF) for this example ranged from 95 to 98%. These values were similar in all subjects as the mean %VAF was 95 ± 2% and the average within-subject standard deviation was 1.1 ± 0.8% (mean ± standard deviation).

a Position, applied perturbation, position with perturbation removed, measured torque and predicted torque for one 4-s segment of data. Predicted torque was a good fit for the measured torque accounting for 97.7% of the variance. b Five example 200-ms segments of position, measured torque and predicted torque. At each time point, IRFs were generated using 200-ms segments of data centered on the time point of interest. At this time point the IRF accounted for 97.3% of the measured torque variance. c Time-varying IRF describing joint impedance for one subject along with the %VAF by this time-varying IRF
Stiffness during self-generated volitional movements
Knee stiffness was strongly modulated during movement, though the pattern of modulation differed amongst subjects. Three strategies were observed, resulting in three different patterns of stiffness modulation. The majority of subjects (7 of 12) used a “flexion–extension” strategy where they alternated using their flexor and extensor muscles (Fig. 4, left column). These subjects displayed two periods of high stiffness, just after maximal extensor activity and just after maximal flexor activity. These subjects also displayed a period of low stiffness, lower than passive levels, which occurred at the onset of flexor muscle relaxation. A second strategy used by three of the subjects was a “flexion” strategy, in which flexor muscles were used nearly exclusively (Fig. 4, middle column). These subjects only displayed one period of high stiffness, which occurred shortly after maximal flexor activity, and a period of low stiffness that occurred at the onset of flexor relaxation—similar to the “flexion–extension” group. Finally, two subjects relied almost exclusively on extensor muscle activation (Fig. 4, right column). Though it is difficult to make generalizations based on only two subjects, both displayed a large decrease in stiffness at the onset of extensor muscle relaxation.

Group average result of the volitional movement experiment. Subjects’ strategies could be grouped into one of three groups: a “flexion–extension” group (left column), a “flexion” group (middle column) or an “extension” group (right column). Position and stiffness were normalized to allow for averaging and comparison between subjects. Stiffness was normalized so that resting passive stiffness was equal to one. Shaded areas denote 1 standard deviation
The stiffness estimated during volitional movement was lower than that estimated in the position and torque-matched isometric trials. Results for a typical subject are shown in Fig. 5, where it can be seen that all five of the static stiffness estimates (circles) were greater than the stiffness estimated during movement (solid line), even though the position and torque were matched in both tasks. Similar results were found for all subjects. Across all tested postures, there was an average difference of 21 ± 2 Nm/rad between the isometric stiffness and the stiffness during movement (Wilcoxon signed rank test z = 6.3, p < 0.0001), which corresponds to a difference of 73% when normalized to the resting passive stiffness. It is interesting to note that the stiffness during movement was not simply a scaled version of that measured during isometric conditions as fitting a linear regression between isometric stiffness and that during movement found a non-significant slope of 0.13 ± 0.09 (t 58 = 1.6, p = 0.11).

Stiffness decreased during movement. Stiffness was lower at times during movement than it was at rest (dotted line). Stiffness was also found to be lower during movement than position and torque-matched static conditions (circles). However, EMG in extensors was greater in static conditions than during movement. Shaded area of stiffness curve denotes standard deviation of stiffness estimate
Influence of muscle activation
Matching torque levels does not guarantee that the muscle activation was the same for both tasks, as there may be muscle co-contraction or musculoskeletal dynamics that dissociates the activity of individual muscles from the net torque about the knee at any given time. Indeed, muscle activation, as measured by EMG, typically differed between the static and movement trials as illustrated by the subject displayed in Fig. 5. We attempted to match the EMGs recorded in the movement and static task by minimizing the average squared error of the EMGs from all muscles between the two tasks. Only static trials that could be matched to a time point in the movement trials with an average difference of less than 2% MVC across all muscles were included in the following analysis. There were 27 such trials across the 12 subjects. An example of the matched EMGs for one subject is shown in Fig. 6. We found that stiffness during the posture task was on average 11 ± 3 Nm/rad greater than the stiffness during the movement task (paired t 26 = 4.5, p = 0.0001) when muscle activity was matched. This corresponded to a difference of 38% of the passive resting stiffness. Note for the particular subject shown in Fig. 6 the mean stiffness estimate dropped below zero. However, at no point was this estimate significantly less than zero (p = 0.27). No other subject had a mean stiffness value that fell below zero at any point in the movement cycle. Thus, the lowest estimate of stiffness for this subject does not suggest that the stiffness of the knee was negative in our experiments, but simply illustrates the variability associated with the system identification process.

Stiffness differed between the two tasks even with matched EMGs. EMGs recorded during static trials (circles) were matched to EMGs recorded during movement. Even with matched EMGs, stiffness was higher in four of the five static trials than during movement in the example subject shown
Influence of stretch reflexes
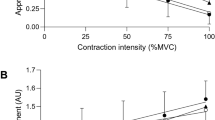
We found that stretch reflexes elicited during the posture task were significantly greater than those elicited during the movement task. The relationship between the background and reflex EMG in the flexor muscles was estimated in nine subjects (Fig. 7b; Table 1), in both movement and posture. This was done only for the flexor muscles, as the range of background EMG values in the extensors was not large enough to estimate reliable slope values in a sufficient number of subjects. The relationships between the background and reflex EMG were quantified by fitting a linear mixed effects model, where background EMG was considered as a continuous factor, task a fixed factor and subject a random factor. An example from one subject is shown in Fig. 7, where it is evident that the slopes between the reflex and background EMG activities are greater in the posture task than in the movement task. Looking across all subjects, stretch reflexes were significantly larger in all three flexor muscles as shown in Table 1. Therefore, task-dependent modulation of reflexes may contribute somewhat to the difference in stiffness between movement and static conditions.

Reflex responses were the larger in the static condition compared to the movement condition. a Reflexes were computed as the average of EMG in 30–60 ms following extension and flexion perturbation in flexors and extensors, respectively (purple-shaded area), while background EMG was computed as the average of the EMG in the 40 ms prior to the extension and flexion perturbations (gray-shaded area). b The relationship between background EMG and reflex EMG was larger in the static condition (squares) than the movement condition (dots). This was quantified by comparing the slopes from linear model between the movement (solid line, with dotted line showing 95% confidence intervals) and static conditions (dashed line, with dash–dotted line showing 95% confidence intervals). Only flexor muscles are shown, as there was not a large enough range of extensor muscle activities in a sufficient number of subjects to reliably estimate the reflex-background slope
Influence of passive movement on knee stiffness
To separate the effect of the movement from the confounds of changing muscle activation, we investigated knee impedance during imposed movements while the subject was relaxed. Knee stiffness was computed for imposed movements at frequencies of 0.2, 0.5, 1, and 2 Hz, as well at static positions throughout the range of movement (Fig. 8a). We found that movement had a significant effect on stiffness using a one-way ANOVA (F 4,99 = 24.096, p ~ 0). Post hoc analysis determined that the stiffness in all passive movement conditions was significantly less than that in the passive isometric condition (p < 0.003 for all) but that there was no significant difference between the stiffness measured in the different passive movement conditions (F 3,99 = 2.0187, p = 0.1162). In general, the stiffness during movement was approximately 80% of the static stiffness (Fig. 8b). To ensure that subjects remained passive in all trials we compared the EMGs collected between the static and movement trials. Comparing all subjects and muscles, we found that VL EMG differed between different movement frequencies by computing a one-way ANOVA (F 4,65 = 6.1952, p = 0.0003), while it did not differ in any of the other muscles (p > 0.1 for all). Even in the VL only the activity at 2 Hz was significantly different than any of the other frequencies; thus, muscle activity could not account for any of the differences seen between the stiffness at static conditions and that during movement.

Stiffness was lower during imposed movements. a Stiffness was estimated during imposed movements and static conditions (circles). b Average normalized stiffness of all three subjects was greater in static conditions (0 Hz) than all the movement conditions. Error bars show the standard deviation of stiffness estimates. **p value <0.01
Discussion
The goal of this study was to explore how knee impedance is modulated during volitional movement and to determine how muscle activation, movement, and stretch reflexes contribute to any potential differences between impedance estimated during movement as compared to impedance estimated during posture. We accomplished this by having subjects move a virtual damped oscillator at a frequency at which they were most comfortable. During these volitional movements position perturbations were applied to estimate knee impedance. We found that stiffness, the steady-state component of impedance, was lower during many phases of movement than during position and torque-matched static trials, confirming our primary hypothesis. Furthermore, at times during the movement, especially during relaxation of the primary agonists, stiffness dipped below passive resting levels. Even when EMG was matched between movement and static conditions, stiffness differed significantly. Two mechanisms were found to change in ways that were consistent with the reduced knee stiffness during movement. These were reduced stretch reflexes and reduced passive joint stiffness during movement. These changes, however, were smaller than changes in whole joint stiffness. These findings provide new insight into the difference in impedance regulation during posture and movement, though a complete understanding of the mechanisms contributing to these differences remains elusive.
Mechanisms of stiffness modulation
Stretch reflex magnitudes decreased during movement relative to their magnitudes during isometric trials at matched muscle activations. Stretch reflexes can account for as much as 52% of the torque produced in response to a perturbation at the knee (Mrachacz-Kersting and Sinkjaer 2003). Reflexes have been shown to be modulated during movement tasks (Yang et al. 1991; McIlroy et al. 1992; Brooke et al. 1993; Collins et al. 1993; Sinkjaer et al. 1996; Kearney et al. 1999; Grey et al. 2001) though there are contradictory findings whether this modulation was independent of changes in position or muscle activation (Sinkjaer et al. 1996; Kearney et al. 1999; Grey et al. 2001). In this study, we found that reflex responses were approximately 25% smaller during movement than during posture. This change in reflex activity may reduce stiffness during movement, though the magnitude of these contributions was not quantified directly in our study. Techniques exist for estimating reflex contributions to stiffness (Kearney et al. 1997; Zhang and Rymer 1997; van der Helm et al. 2002; Ludvig and Kearney 2007), including in time-varying conditions (Ludvig et al. 2011). However, some of these techniques (Zhang and Rymer 1997; van der Helm et al. 2002) make model assumptions that do not appear to hold at the knee, while others (Kearney et al. 1997; Ludvig and Kearney 2007; Ludvig et al. 2011) require rapid perturbations of joint position that were not feasible in these experiments given the large inertia of the leg below the knee. Thus, it was not possible to analytically separate the stiffness due to the intrinsic mechanics of the joint and the surrounding muscles from that due to that from reflex pathways. Limiting the IRF length to 120 ms would limit the contribution of reflexes to the estimated impedance. Any reflex torque occurring 120 ms following the perturbation would not be included and would contribute to the differences between observed and predicted torque. However, reflex contributions can begin much sooner than 120 ms following a perturbation, thus there are likely reflex contributions in our estimates of impedance. Nonetheless, it seems unlikely that the entire decrease in stiffness observed during movement could be attributed to decreased reflex responses since the percentage decrease in reflex magnitude was less than the observed decrease in knee stiffness, even at matched levels of EMG. While there is some evidence that EMG and mechanical measures of the reflex response can be dissociated (Kearney et al. 1999; Mirbagheri et al. 2000), those dissociations present as a decrease in mechanical effects as compared to EMG measures. Hence, we expect that the 25% decrease in reflex EMG during movement represents an upper bound of the reflexively mediated reductions in knee stiffness under these conditions.
Movement-dependent changes in muscle properties may also contribute to the observed differences during the isometric and volitional movement tasks. Short-range stiffness (Rack and Westbury 1974) is a dominant contributor to joint stiffness for small perturbations delivered under isometric conditions with constant muscle activation (Hu et al. 2011). However, stiffness decreases for larger imposed movements (Rack and Westbury 1974; Kearney and Hunter 1982), and this may have contributed to the reduced stiffness observed during the large volitional movements even though small perturbations were used for estimation. Previous studies have also shown that imposed movements decrease the stiffness of passive muscle (Lakie and Robson 1988). Our passive measurements agree with these earlier findings, as imposed sinusoidal movements of the leg caused the passive knee stiffness to drop by approximately 20%. These findings have been described as muscle “thixotropy” (Proske et al. 1993, 2014). The high stiffness state of passive muscle prior to movement has been attributed to bound cross-bridges. This binding requires passive muscle to be isometric for approximately 2 s (Proske et al. 1993). Hence, while thixotropy is consistent with our passive measurements, it is unlikely to be a major contributor to the decreased stiffness we observed during active conditions.
The dynamics of muscle activation and contraction may also have contributed to the observed results. As muscle activation increases, short-range stiffness increases in proportion to muscle force (Morgan 1977). For dynamic isometric contractions, stiffness and muscle force can become decoupled, with stiffness increasing prior to force generation and decreasing after force relaxation, though decreases in muscle stiffness below passive levels have not been reported for isometric contractions (Stein and Gordon 1986). Muscle shortening also leads to decreases in the short-range stiffness of muscles (Tsuchiya et al. 1982; Ettema and Huijing 1994). These observations from animal studies explain why it is challenging to compare stiffness estimated during dynamic conditions to that estimated during static conditions. However, they do not explain how stiffness during movement can drop below passive conditions, a phenomenon we have yet to see replicated in isolated muscle studies.
The drop in stiffness below passive levels could be due to the rapid muscle unloading that occurs when transitioning between flexion and extension. Recent pilot studies from our lab have shown that rapidly alternating between isometric flexion and extension causes stiffness to decrease below passive levels (Ludvig and Perreault 2014a). This is in contrast to non-alternating changes in isometric flexion or extension, during which stiffness simply increases with joint torque. Thus, it is possible that this rapid switching between the activation of flexors and extensors leads to a short transient period in which the muscle is not engaged due to the tendon becoming slack, thus resulting in extremely low levels of joint stiffness.
Limitations of the current study
We observed three patterns of stiffness modulation in this study, which limited the types of analyses that could be performed on all subjects. Our protocol was designed so that subjects would cyclically flex and extend their knee at a frequency and amplitude similar to walking (Borghese et al. 1996). The paradigm resulted in the desired kinematic profiles for all subjects, but the muscle activation profiles varied greatly. This variability arose because the coupled leg-motor system was designed to have a resonant frequency similar to locomotion. Therefore, there were many muscle activation patterns suitable for obtaining the desired kinematics. We did classify the observed muscle activity into three broad strategies—flexion, extension, and flexion–extension. Importantly, our estimation algorithm identified patterns of knee stiffness that were similar among subjects who adopted similar muscle activation patterns. These results emphasize the importance of quantifying joint mechanics as well as kinematics, particularly in tasks for which redundant solutions exist.
Implications
One potential application of these results is for the design of powered prostheses and exoskeletons seeking to replicate the mechanics of an intact leg (Perreault et al. 2014). The accessibility of lighter actuators and power supplies has led to substantial growth in the development of powered devices for assisting locomotion. Many of these employ a biomimetic design that seeks to replicate at least some aspect of unimpaired mechanical control (Eilenberg et al. 2010; Ha et al. 2011). Consequently, many groups have recently been studying human leg mechanics, often with the intent of transferring the gained knowledge to robotic assistive devices (Hansen et al. 2004; Pfeifer et al. 2012; Rouse et al. 2012). Though our paradigm does not replicate the mechanics of walking, it does demonstrate how motions of a similar magnitude and frequency (Borghese et al. 1996) greatly reduce joint stiffness from that which would be estimated considering only isometric measurements. These findings are consistent with empirical attempts to design knee prostheses that result in symmetric gait (Pfeifer 2014). Furthermore, this study lays the foundation for future work, as it developed the tools and techniques needed to quantify joint impedance during walking.
References
Barrett RS, Besier TF, Lloyd DG (2007) Individual muscle contributions to the swing phase of gait: an EMG-based forward dynamics modelling approach. Simul Model Pract Theory 15:1146–1155. doi:10.1016/j.simpat.2007.07.005
Bennett DJ, Hollerbach JM, Xu Y, Hunter IW (1992) Time-varying stiffness of human elbow joint during cyclic voluntary movement. Exp Brain Res 88:433–442. doi:10.1007/BF02259118
Borghese NA, Bianchi L, Lacquaniti F (1996) Kinematic determinants of human locomotion. J Physiol 494:863–879
Brooke JD, Collins DF, Boucher S, McIlroy WE (1991) Modulation of human short latency reflexes between standing and walking. Brain Res 548:172–178. doi:10.1016/0006-8993(91)91119-L
Brooke JD, Misiaszek JE, Cheng J (1993) Locomotor-like rotation of either hip or knee inhibits soleus H reflexes in humans. Somatosens Mot Res 10:357–364. doi:10.3109/08990229309028843
Collins DF, McIlroy WE, Brooke JD (1993) Contralateral inhibition of soleus H reflexes with different velocities of passive movement of the opposite leg. Brain Res 603:96–101. doi:10.3109/08990229309028843
de Vlugt E, Schouten AC, van der Helm FC (2003) Closed-loop multivariable system identification for the characterization of the dynamic arm compliance using continuous force disturbances: a model study. J Neurosci Methods 122:123–140 (pii:S0165027002003035)
Eilenberg MF, Geyer H, Herr H (2010) Control of a powered ankle-foot prosthesis based on a neuromuscular model. IEEE Trans Neural Syst Rehabil Eng 18:164–173. doi:10.1109/TNSRE.2009.2039620
Ettema GJ, Huijing PA (1994) Skeletal muscle stiffness in static and dynamic contractions. J Biomech 27:1361–1368. doi:10.1016/0021-9290(94)90045-0
Finley JM, Dhaher YY, Perreault EJ (2013) Acceleration dependence and task-specific modulation of short- and medium-latency reflexes in the ankle extensors. Physiol Rep 1:e00051. doi:10.1002/phy2.51
Forbes PA, Happee R, van der Helm FC, Schouten AC (2011) EMG feedback tasks reduce reflexive stiffness during force and position perturbations. Exp Brain Res 213:49–61. doi:10.1007/s00221-011-2776-y
Gomi H, Kawato M (1996) Equilibrium-point control hypothesis examined by measured arm stiffness during multijoint movement. Science 272:117–120. doi:10.1126/science.272.5258.117
Gomi H, Kawato M (1997) Human arm stiffness and equilibrium-point trajectory during multi-joint movement. Biol Cybern 76:163–171. doi:10.1007/s004220050329
Grey MJ, Pierce CW, Milner TE, Sinkjaer T (2001) Soleus stretch reflex during cycling. Mot Control 5:36–49
Ha KH, Varol HA, Goldfarb M (2011) Volitional control of a prosthetic knee using surface electromyography. IEEE Trans Biomed Eng 58:144–151. doi:10.1109/TBME.2010.2070840
Hansen AH, Childress DS, Miff SC, Gard SA, Mesplay KP (2004) The human ankle during walking: implications for design of biomimetic ankle prostheses. J Biomech 37:1467–1474. doi:10.1016/j.jbiomech.2004.01.017
Hoffer JA, Andreassen S (1981) Regulation of soleus muscle stiffness in premammillary cats: intrinsic and reflex components. J Neurophysiol 45:267–285
Hogan N (1984) Adaptive control of mechanical impedance by coactivation of antagonist muscles. IEEE Trans Autom Control 29:681–690. doi:10.1109/tac.1984.1103644
Hu X, Murray WM, Perreault EJ (2011) Muscle short-range stiffness can be used to estimate the endpoint stiffness of the human arm. J Neurophysiol 105:1633–1641. doi:10.1152/jn.00537.2010
Kearney RE, Hunter IW (1982) Dynamics of human ankle stiffness: variation with displacement amplitude. J Biomech 15:753–756
Kearney RE, Hunter IW (1990) System identification of human joint dynamics. Crit Rev Biomed Eng 18:55–87
Kearney RE, Stein RB, Parameswaran L (1997) Identification of intrinsic and reflex contributions to human ankle stiffness dynamics. IEEE Trans Biomed Eng 44:493–504. doi:10.1109/10.581944
Kearney RE, Lortie M, Stein RB (1999) Modulation of stretch reflexes during imposed walking movements of the human ankle. J Neurophysiol 81:2893–2902
Lakie M, Robson LG (1988) Thixotropic changes in human muscle stiffness and the effects of fatigue. Q J Exp Physiol 73:487–500. doi:10.1113/expphysiol.1988.sp003169
Lloyd DG, Besier TF (2003) An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo. J Biomech 36:765–776. doi:10.1016/S0021-9290(03)00010-1
Ludvig D, Kearney RE (2007) Real-time estimation of intrinsic and reflex stiffness. IEEE Trans Biomed Eng 54:1875–1884. doi:10.1109/TBME.2007.894737
Ludvig D, Perreault EJ (2012) System identification of physiological systems using short data segments. IEEE Trans Biomed Eng 59:3541–3549. doi:10.1109/TBME.2012.2220767
Ludvig D, Perreault EJ (2014a) The dynamic effect of muscle activation on knee stiffness. Conf Proc IEEE Eng Med Biol Soc 2014:1599–1602. doi:10.1109/EMBC.2014.6943910
Ludvig D, Perreault EJ (2014b) Task-relevant adaptation of musculoskeletal impedance during posture and movement. In: 2014 American Control Conference, pp 4784–4789. doi:10.1109/ACC.2014.6859185
Ludvig D, Cathers I, Kearney RE (2007) Voluntary modulation of human stretch reflexes. Exp Brain Res 183:201–213. doi:10.1007/s00221-007-1030-0
Ludvig D, Visser TS, Giesbrecht H, Kearney RE (2011) Identification of time-varying intrinsic and reflex joint stiffness. IEEE Trans Biomed Eng 58:1715–1723. doi:10.1109/TBME.2011.2113184
Maganaris CN, Paul JP (2000) Hysteresis measurements in intact human tendon. J Biomech 33:1723–1727. doi:10.1016/S0021-9290(00)00130-5
McIlroy WE, Collins DF, Brooke JD (1992) Movement features and H-reflex modulation. II. Passive rotation, movement velocity and single leg movement. Brain Res 582:85–93. doi:10.1016/0006-8993(92)90320-9
Mirbagheri MM, Barbeau H, Kearney RE (2000) Intrinsic and reflex contributions to human ankle stiffness: variation with activation level and position. Exp Brain Res 135:423–436
Morgan DL (1977) Separation of active and passive components of short-range stiffness of muscle. Am J Physiol 232:C45–C49
Mrachacz-Kersting N, Sinkjaer T (2003) Reflex and non-reflex torque responses to stretch of the human knee extensors. Exp Brain Res 151:72–81. doi:10.1007/s00221-003-1483-8
Perreault E, Hargrove L, Ludvig D, Lee H, Sensinger J (2014) Considering limb impedance in the design and control of prosthetic devices. In: Artemiadis P (ed) Neuro-robotics. Springer, Netherlands, pp 59–83
Pfeifer SM (2014) Biomimetic stiffness for transfemoral prostheses. ETH Zurich. doi:10.3929/ethz-a-010261188
Pfeifer S, Vallery H, Hardegger M, Riener R, Perreault EJ (2012) Model-based estimation of knee stiffness. IEEE Trans Biomed Eng 59:2604–2612. doi:10.1109/TBME.2012.2207895
Popescu F, Hidler JM, Rymer WZ (2003) Elbow impedance during goal-directed movements. Exp Brain Res 152:17–28. doi:10.1007/s00221-003-1507-4
Proske U, Morgan DL, Gregory JE (1993) Thixotropy in skeletal muscle and in muscle spindles: a review. Prog Neurobiol 41:705–721. doi:10.1016/0301-0082(93)90032-N
Proske U, Tsay A, Allen T (2014) Muscle thixotropy as a tool in the study of proprioception. Exp Brain Res 232:3397–3412. doi:10.1007/s00221-014-4088-5
Rack PM, Westbury DR (1974) The short range stiffness of active mammalian muscle and its effect on mechanical properties. J Physiol 240:331–350. doi:10.1113/jphysiol.1974.sp010613
Rouse EJ, Hargrove LJ, Perreault EJ, Kuiken TA (2012) Estimation of human ankle impedance during walking using the perturbator robot. In: Biomedical robotics and biomechatronics (BioRob), 2012 4th IEEE RAS & EMBS International Conference, pp 373–378. doi:10.1109/BioRob.2012.6290842
Sinkjaer T, Andersen JB, Larsen B (1996) Soleus stretch reflex modulation during gait in humans. J Neurophysiol 76:1112–1120
Stein RB, Gordon T (1986) Nonlinear stiffness–force relationships in whole mammalian skeletal muscles. Can J Physiol Pharmacol 64:1236–1244. doi:10.1139/y86-209
Tsuchiya T, Guth K, Kuhn HJ, Ruegg JC (1982) Decrease in stiffness during shortening in calcium activated skinned muscle fibers. Pflugers Arch 392:322–326. doi:10.1007/bf00581626
van der Helm FC, Schouten AC, de Vlugt E, Brouwn GG (2002) Identification of intrinsic and reflexive components of human arm dynamics during postural control. J Neurosci Methods 119:1–14. doi:10.1016/S0165-0270(02)00147-4
Westwick DT, Perreault EJ (2012) Estimates of acausal joint impedance models. IEEE Trans Biomed Eng 59:2913–2921. doi:10.1109/TBME.2012.2213339
Whitehead NP, Gregory JE, Morgan DL, Proske U (2001) Passive mechanical properties of the medial gastrocnemius muscle of the cat. J Physiol 536:893–903. doi:10.1111/j.1469-7793.2001.00893.x
Wiegner AW (1987) Mechanism of thixotropic behavior at relaxed joints in the rat. J Appl Physiol 62:1615–1621
Yang JF, Stein RB, James KB (1991) Contribution of peripheral afferents to the activation of the soleus muscle during walking in humans. Exp Brain Res 87:679–687. doi:10.1007/BF00227094
Zhang LQ, Rymer WZ (1997) Simultaneous and nonlinear identification of mechanical and reflex properties of human elbow joint muscles. IEEE Trans Biomed Eng 44:1192–1209. doi:10.1109/10.649991
Acknowledgements
This work was supported in part by the National Institutes of Health (Grant NS053813) and the National Science Foundation (Grant 0932263). The authors would like to acknowledge Tim Haswell for his help with data collection and Serge Pfeifer for the original design of one of the figures.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Ludvig, D., Plocharski, M., Plocharski, P. et al. Mechanisms contributing to reduced knee stiffness during movement. Exp Brain Res 235, 2959–2970 (2017). https://doi.org/10.1007/s00221-017-5032-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-017-5032-2