
Abstract
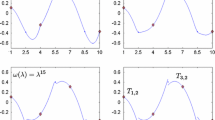
We develop a constructive piecewise polynomial approximation theory in weighted Sobolev spaces with Muckenhoupt weights for any polynomial degree. The main ingredients to derive optimal error estimates for an averaged Taylor polynomial are a suitable weighted Poincaré inequality, a cancellation property and a simple induction argument. We also construct a quasi-interpolation operator, built on local averages over stars, which is well defined for functions in \(L^1\). We derive optimal error estimates for any polynomial degree on simplicial shape regular meshes. On rectangular meshes, these estimates are valid under the condition that neighboring elements have comparable size, which yields optimal anisotropic error estimates over \(n\)-rectangular domains. The interpolation theory extends to cases when the error and function regularity require different weights. We conclude with three applications: nonuniform elliptic boundary value problems, elliptic problems with singular sources, and fractional powers of elliptic operators.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
A fundamental tool in analysis, with both practical and theoretical relevance, is the approximation of a function by a simpler one. For continuous functions a foundational result in this direction was given by K. Weierstrass in 1885: continuous functions defined on a compact interval can be uniformly approximated as closely as desired by polynomials. Mollifiers, interpolants, splines and even Nevanlinna–Pick theory can be regarded as instances of this program; see, for instance, [2, 54]. For weakly differentiable functions, the approximation by polynomials is very useful when trying to understand their behavior. In fact, this idea goes back to Sobolev [68], who used a sort of averaged Taylor polynomial to discuss equivalent norms in Sobolev spaces.
The role of polynomial approximation and error estimation is crucial in numerical analysis: it is the basis of discretization techniques for partial differential equations (PDE), particularly the finite element method. For the latter, several constructions for standard Sobolev spaces \(W_p^{1}\), with \(1 \le p \le \infty \), and their properties are well studied; see [24, 28, 29, 31, 65].
On the other hand, many applications lead to boundary value problems for nonuniformly elliptic equations. The ellipticity distortion can be caused by degenerate/singular behavior of the coefficients of the differential operator or by singularities in the domain. For such equations it is natural to look for solutions in weighted Sobolev spaces [3, 10, 14, 15, 25, 33, 36, 37, 51, 70] and to study the regularity properties of the solution in weighted spaces as well [53]. Of particular importance are weighted Sobolev spaces with a weight belonging to the so-called Muckenhoupt class \(A_p\) [58]; see also [36, 49, 70]. However, the literature focusing on polynomial approximation in this type of Sobolev spaces is rather scarce; we refer the reader to [3, 4, 6, 10, 25, 39, 42, 56] for some partial results. Most of these results focus on a particular nonuniformly elliptic equation and exploit the special structure of the coefficient to derive polynomial interpolation results.
To fix ideas, consider the following nonuniformly elliptic boundary value problem: let \(\Omega \) be an open and bounded subset of \({\mathbb {R}}^n\) (\(n\ge 1\)) with boundary \(\partial \Omega \). Given a function \(f\), find \(u\) that solves
where \({\mathcal {A}}: \Omega \rightarrow {\mathbb {R}}^{n\times n}\) is symmetric and satisfies the following nonuniform ellipticity condition
Here the relation \(a \lesssim b\) indicates that \(a \le Cb\), with a constant \(C\) and \(\omega \) is a weight function, i.e., a nonnegative and locally integrable measurable function, which might vanish, blow up, and possess singularities. Examples of this type of equations are the harmonic extension problem related with the fractional Laplace operator [14, 15, 60], elliptic problems involving measures [3, 25], elliptic PDE in an axisymmetric three dimensional domain with axisymmetric data [10, 42], and equations modeling the motion of particles in a central potential field in quantum mechanics [6]. Due to the nature of the coefficient \({\mathcal {A}}\), the classical Sobolev space \(H^1(\Omega )\) is not appropriate for the analysis and approximation of this problem.
Nonuniformly elliptic equations of the type (1.1)–(1.2), with \(\omega \) in the so-called Muckenhoupt class \(A_2\), have been studied in [36]: for \(f \in L^2(\omega ^{-1},\Omega )\), there exists a unique solution in \(H_0^1(\omega ,\Omega )\) [36, Theorem 2.2] (see Sect. 2.2 for notation). Consider the discretization of (1.1) with the finite element method. Let \({\fancyscript{T}}\) be a conforming triangulation of \(\Omega \) and let \({\mathbb {V}}({\fancyscript{T}})\) be a finite element space. The Galerkin approximation of the solution to (1.1) is given by the unique function \(U_{{\fancyscript{T}}} \in {\mathbb {V}}({\fancyscript{T}})\) that solves
Invoking Galerkin orthogonality, we deduce

In other words, the numerical analysis of this boundary value problem reduces to a result in approximation theory: the distance between the exact solution \(u\) and its approximation \(U_{{\fancyscript{T}}}\) in a finite element space is bounded by the best approximation error in the finite element space with respect to an appropriate weighted Sobolev norm. A standard way of obtaining bounds for the approximation error is by considering \(W = \Pi _{{\fancyscript{T}}} v\) in (1.4), where \(\Pi _{\fancyscript{T}}\) is a suitable interpolation operator.
The purpose of this work is twofold. We first go back to the basics, and develop an elementary constructive approach to piecewise polynomial interpolation in weighted Sobolev spaces with Muckenhoupt weights. We consider an averaged version of the Taylor polynomial and, upon using an appropriate weighted Poincaré inequality and a cancellation property, we derive optimal approximation estimates for constant and linear approximations. We extend these results to any polynomial degree \(m\) (\(m \ge 0\)), by a simple induction argument.
The functional framework considered is weighted Sobolev spaces with weights in the Muckenhoupt class \(A_p({\mathbb {R}}^n)\), thereby extending the classical polynomial approximation theory in Sobolev spaces [13, 23, 24, 65]. In addition, we point out that the results about interpolation in Orlicz spaces of [26, 30] do not apply to our situation since, for weighted spaces, the Young function used to define the modular depends on the point in space as well. In this respect, our results can be regarded as a first step in the development of an approximation theory in Orlicz–Musielak spaces and in Sobolev spaces in metric measure spaces [46].
The second main contribution of this work is the construction of a quasi-interpolation operator \(\Pi _{{\fancyscript{T}}}\), built on local averages over stars and thus well defined for functions in \(L^1(\Omega )\) as those in [24, 65]. The ensuing polynomial approximation theory in weighted Sobolev spaces with Muckenhoupt weights allows us to obtain optimal and local interpolation estimates for the quasi-interpolant \(\Pi _{{\fancyscript{T}}}\). On simplicial discretizations, these results hold true for any polynomial degree \(m \ge 0\), and they are derived in the weighted \(W_p^k\)-seminorm (\(0 \le k \le m+1\)). The key ingredient is an invariance property of the quasi-interpolant \(\Pi _{{\fancyscript{T}}}\) over the finite element space. On the other hand, on rectangular discretizations, we only assume that neighboring cells in \({\fancyscript{T}}\) have comparable size, as in [31, 60]. This mild assumption enables us also to obtain anisotropic error estimates for domains that can be decomposed into \(n\)–rectangles. These estimates are derived in the weighted \(W_p^1\)-semi-norm and the weighted \(L^p\)-norm, the latter being a new result even for the unweighted setting. For \(m=0,1\), we also derive interpolation estimates in the space \(W^m_q(\rho ,\Omega )\) when the smoothness is measured in the space \(W_p^{m+1}(\omega ,\Omega )\), with different weights \(\omega \ne \rho \) and Lebesgue exponents \( 1< p \le q\), provided \(W_p^{m+1}(\omega ,\Omega ) \hookrightarrow W^m_q(\rho ,\Omega )\).
The outline of this paper is as follows. In Sect. 2.1 we introduce some terminology used throughout this work. In Sect. 2.2, we recall the definition of a Muckenhoupt class, weighted Sobolev spaces and some of their properties. Section 3 is dedicated to an important weighted \(L^p\)-based Poincaré inequality over star-shaped domains and domains that can be written as the finite union of star-shaped domains. In Sect. 4, we consider an averaged version of the Taylor polynomial, and we develop a constructive theory of piecewise polynomial interpolation in weighted Sobolev spaces with Muckenhoupt weights. We discuss the quasi-interpolation operator \(\Pi _{\fancyscript{T}}\) and its properties in Sect. 5. We derive optimal approximation properties in the weighted \(W_p^k\)-seminorm for simplicial triangulations in Sect. 5.1. In Sect. 5.2 we derive anisotropic error estimates on rectangular discretizations for a \({\mathbb {Q}}_1\) quasi-interpolant operator assuming that \(\Omega \) is an \(n\)-rectangle. Section 6 is devoted to derive optimal and local interpolation estimates for different metrics (i.e., \(p \le q\), \(\omega \ne \rho \)). Finally, in Sect. 7 we present applications of our interpolation theory to nonuniformly elliptic equations (1.1), elliptic equations with singular sources, and fractional powers of elliptic operators.
2 Notation and preliminaries
2.1 Notation
Throughout this work, \(\Omega \) is an open, bounded and connected subset of \({\mathbb {R}}^n\), with \(n\ge 1\). The boundary of \(\Omega \) is denoted by \(\partial \Omega \). Unless specified otherwise, we will assume that \(\partial \Omega \) is Lipschitz.
The set of locally integrable functions on \(\Omega \) is denoted by \({L^{1}_{{\mathrm {loc}}}}(\Omega )\). The Lebesgue measure of a measurable subset \(E \subset {\mathbb {R}}^n\) is denoted by \(|E|\). The mean value of a locally integrable function \(f\) over a set \(E\) is

For a multi-index \(\kappa = (\kappa _1,\dots ,\kappa _n) \in \mathbb {N}^n\) we denote its length by \(|\kappa | = \kappa _1 + \cdots + \kappa _n\), and, if \(x \in {\mathbb {R}}^n\), we set \(x^{\kappa } = x_1^{\kappa _1}\dots x_n^{\kappa _n} \in {\mathbb {R}}\), and
Given \( p\in (1 ,\infty )\), we denote by \(p'\) the real number such that \(1/p + 1/p' = 1\), i.e., \(p' = p/(p-1)\).
Let \( \gamma , z \in {\mathbb {R}}^n\), the binary operation \( \circ : {\mathbb {R}}^n \times {\mathbb {R}}^{n} \rightarrow {\mathbb {R}}^{n}\) is defined by
If \(X\) and \(Y\) are topological vector spaces, we write \(X \hookrightarrow Y\) to denote that \(X\) is continuously embedded in \(Y\). We denote by \(X'\) the dual of \(X\). If \(X\) is normed, we denote by \(\Vert \cdot \Vert _X\) its norm. The relation \(a \lesssim b\) indicates that \(a \le Cb\), with a constant \(C\) that does not depend on either \(a\) or \(b\), the value of \(C\) might change at each occurrence.
2.2 Weighted Sobolev spaces
We now introduce the class of Muckenhoupt weighted Sobolev spaces and refer to [27, 36, 50, 51, 70] for details. We start with the definition of a weight.
Definition 2.1
(weight) A weight is a function \(\omega \in {L^{1}_{{\mathrm {loc}}}}({\mathbb {R}}^n)\) such that \(\omega (x) > 0\) for a.e. \(x \in {\mathbb {R}}^n\).
Every weight induces a measure, with density \(\omega {\, {\mathrm{d}}}x\), over the Borel sets of \({\mathbb {R}}^n\). For simplicity, this measure will also be denoted by \(\omega \). For a Borel set \(E \subset {\mathbb {R}}^n\) we define \(\omega (E) = \int _{E}\omega {\, {\mathrm{d}}}x\) .
We recall the definition of Muckenhoupt classes; see [27, 36, 58, 70].
Definition 2.2
(Muckenhoupt class \(A_p\)) Let \(\omega \) be a weight and \(1 < p < \infty \). We say \(\omega \in A_p({\mathbb {R}}^n)\) if there exists a positive constant \(C_{p,\omega }\) such that

where the supremum is taken over all balls \(B\) in \({\mathbb {R}}^n\). In addition,
If \(\omega \) belongs to the Muckenhoupt class \(A_p({\mathbb {R}}^n)\), we say that \(\omega \) is an \(A_p\)-weight, and we call the constant \(C_{p,\omega }\) in (2.2) the \(A_p\)-constant of \(\omega \).
A classical example is the function \(|x|^{\gamma }\), which is an \(A_p\)-weight if and only if \(-n< \gamma < n(p-1)\). Another important example is \(d(x)= \mathsf d (x,\partial \Omega )^{\alpha }\), where for \(x \in \Omega \), \(\mathsf d (x,\partial \Omega )\) denotes the distance from the point \(x\) to the boundary \(\partial \Omega \). The function \(d\) belongs to \(A_2({\mathbb {R}}^n)\) if and only if \(-n<\alpha <n\). This function is used to define weighted Sobolev spaces which are important to study Poisson problems with singular sources; see [3, 25].
Throughout this work, we shall use some properties of the \(A_p\)-weights which, for completeness, we state and prove below.
Proposition 2.1
(properties of the \(A_p\)-class) Let \(1<p<\infty \), and \(\omega \in A_p({\mathbb {R}}^n)\). Then, we have the following properties:
-
(i)
\(\omega ^{-1/(p-1)} \in {L^{1}_{{\mathrm {loc}}}}({\mathbb {R}}^n)\).
-
(ii)
\(C_{p,\omega } \ge 1\).
-
(iii)
If \(1 < p < r < \infty \), then \(A_p({\mathbb {R}}^n) \subset A_r({\mathbb {R}}^n)\), and \(C_{r,\omega } \le C_{p,\omega }\).
-
(iv)
\(\omega ^{-1/(p-1)} \in A_{p'}({\mathbb {R}}^n)\) and, conversely, \(\omega ^{-1/(p'-1)} \in A_{p}({\mathbb {R}}^n)\). Moreover,
$$\begin{aligned} C_{p',\omega ^{-1/(p-1)}} = C_{p,\omega }^{1/(p-1)}. \end{aligned}$$ -
(v)
The \(A_p\)-condition is invariant under translations and isotropic dilations, i.e., the weights \(x \mapsto \omega (x+\mathbf {b})\) and \(x \mapsto \omega (\mathbf {A}x)\), with \(\mathbf {b} \in {\mathbb {R}}^n\) and \(\mathbf {A}=a \cdot \mathbf {I}\) with \(a \in {\mathbb {R}}\), both belong to \(A_p({\mathbb {R}}^n)\) with the same \(A_p\)-constant as \(\omega \).
Proof
Properties (i) and (iv) follow directly from the definition of the Muckenhoupt class \(A_p({\mathbb {R}}^n)\) given in (2.2). By writing \(1=\omega ^{1/p} \omega ^{-1/p}\) and the Hölder inequality, we obtain that for every ball \(B \subset {\mathbb {R}}^n\),

which proves (ii). Using the Hölder inequality again, we obtain

which implies (iii). Finally, to prove property (v) we denote \(\bar{\omega }(x) = \omega (\mathbf {A}x+\mathbf {b})\), and let \(B_r\) be a ball of radius \(r\) in \({\mathbb {R}}^n\). Using the change of variables \(y = \mathbf {A}x+\mathbf {b}\), we obtain

which, since \(a^n |B_{r}| = |B_{ar}|\), proves (v). \(\square \)
From the \(A_p\)-condition and Hölder’s inequality follows that an \(A_p\)-weight satisfies the so-called strong doubling property. The proof of this fact is standard and presented here for completeness; see [70, Proposition1.2.7] for more details.
Proposition 2.2
(strong doubling property) Let \(\omega \in A_p({\mathbb {R}}^n)\) with \(1< p < \infty \) and let \(E \subset {\mathbb {R}}^n\) be a measurable subset of a ball \(B \subset {\mathbb {R}}^n\). Then
Proof
Since \(E \subset {\mathbb {R}}^n\) is measurable, we have that

This completes the proof. \(\square \)
In particular, every \(A_p\)-weight satisfies a doubling property, i.e., there exists a positive constant \(C\) such that
for every ball \(B_r \subset {\mathbb {R}}^n\). The infimum over all constants \(C\), for which (2.5) holds, is called the doubling constant of \(\omega \). The class of \(A_p\)-weights was introduced by Muckenhoupt [58], who proved that the \(A_p\)-weights are precisely those for which the Hardy–Littlewood maximal operator is bounded from \(L^p(\omega ,{\mathbb {R}}^n)\) to \(L^p(\omega ,{\mathbb {R}}^n)\), when \(1 < p < \infty \). We now define weighted Lebesgue spaces as follows.
Definition 2.3
(weighted Lebesgue spaces) Let \(\omega \in A_p\), and let \(\Omega \subset {\mathbb {R}}^n\) be an open and bounded domain. For \(1< p < \infty \), we define the weighted Lebesgue space \(L^p(\omega , \Omega )\) as the set of measurable functions \(u\) on \(\Omega \) equipped with the norm
An immediate consequence of \(\omega \in A_p({\mathbb {R}}^n)\) is that functions in \(L^p(\omega ,\Omega )\) are locally summable which, in fact, only requires that \(\omega ^{-1/(p-1)} \in {L^{1}_{{\mathrm {loc}}}}({\mathbb {R}}^n)\).
Proposition 2.3
(\(L^p(\omega ,\Omega )\subset {L^{1}_{{\mathrm {loc}}}}(\Omega )\)) Let \(\Omega \) be an open set, \(1 < p < \infty \) and \(\omega \) be a weight such that \(\omega ^{-1/(p-1)} \in {L^{1}_{{\mathrm {loc}}}}(\Omega )\). Then, \(L^p(\omega , \Omega ) \subset {L^{1}_{{\mathrm {loc}}}}(\Omega )\).
Proof
Let \(u \in L^p(\omega , \Omega )\), and let \(B \subset \Omega \) be a ball. By Hölder’s inequality, we have
which concludes the proof. \(\square \)
Notice that when \(\Omega \) is bounded we have \(L^p(\omega , \Omega ) \hookrightarrow L^1(\Omega )\). In particular, Proposition 2.3 shows that it makes sense to talk about weak derivatives of functions in \(L^p(\omega , \Omega )\). We define weighted Sobolev spaces as follows.
Definition 2.4
(weighted Sobolev spaces) Let \(\omega \) be an \(A_p\)-weight with \(1< p < \infty \), \(\Omega \subset {\mathbb {R}}^n\) be an open and bounded domain and \(m \in \mathbb {N}\). The weighted Sobolev space \(W^m_p(\omega , \Omega )\) is the set of functions \(u \in L^p(\omega ,\Omega )\) such that for any multi-index \(\kappa \) with \(|\kappa | \le m\), the weak derivatives \(D^{\kappa } u \in L^p(\omega , \Omega )\), with seminorm and norm
respectively. We also define \({{\mathop {W}\limits ^{\circ }}_{p}^{m}}(\omega , \Omega )\) as the closure of \(C_0^{\infty }(\Omega )\) in \(W^m_p(\omega , \Omega )\).
Without any restriction on the weight \(\omega \), the space \(W^m_p(\omega , \Omega )\) may not be complete. However, when \(\omega ^{-1/(p-1)}\) is locally integrable in \({\mathbb {R}}^n\), \(W^m_p(\omega ,\Omega )\) is a Banach space; see [52]. Properties of weighted Sobolev spaces can be found in classical references like [50, 51, 70]. It is remarkable that most of the properties of classical Sobolev spaces have a weighted counterpart and it is more so that this is not because of the specific form of the weight but rather due to the fact that the weight \(\omega \) belongs to the Muckenhoupt class \(A_p\); see [36, 41, 58]. In particular, we have the following results (cf. [70, Proposition 2.1.2, Corollary 2.1.6] and [41, Theorem 1]) .
Proposition 2.4
(properties of weighted Sobolev spaces) Let \(\Omega \subset {\mathbb {R}}^n\) be an open and bounded domain, \(1 < p < \infty \), \(\omega \in A_p({\mathbb {R}}^n)\) and \(m \in \mathbb {N}\). The spaces \(W^m_p(\omega , \Omega )\) and \({{\mathop {W}\limits ^{\circ }}_{p}^{m}}(\omega , \Omega )\) are complete, and \(W^m_p(\omega , \Omega ) \cap C^{\infty }(\Omega )\) is dense in \(W^m_p(\omega , \Omega )\).
3 A weighted Poincaré inequality
In order to obtain interpolation error estimates in \(L^p(\omega ,\Omega )\) and \(W^1_p(\omega ,\Omega )\), it is instrumental to have a weighted Poincaré-like inequality [31, 60]. A pioneering reference is the work by Fabes et al. [36], which shows that, when the domain is a ball and the weight belongs to \(A_p\) with \(1 < p < \infty \), a weighted Poincaré inequality holds [36, Theorem 1.3 and Theorem 1.5]. For generalizations of this result see [38, 47]. For a star-shaped domain, and a specific \(A_2\)-weight, we have proved a weighted Poincaré inequality [60, Lemma 4.3]. In this section we extend this result to a general exponent \(p\) and a general weight \(\omega \in A_p({\mathbb {R}}^n)\). Our proof is constructive and not based on a compactness argument. This allows us to trace the dependence of the stability constant on the domain geometry.
Lemma 3.1
(weighted Poincaré inequality I) Let \(S \subset {\mathbb {R}}^n\) be bounded, star-shaped with respect to a ball \(\hat{B}\), with \({{\mathrm{diam}}}S \approx 1\). Let \(\chi \) be a continuous function on \(S\) with \(\Vert \chi \Vert _{L^1(S)} = 1\). Given \(\omega \in A_p({\mathbb {R}}^n)\), we define \(\mu (x)= \omega (\mathbf {A}x+\mathbf {b})\), for \(\mathbf {b} \in {\mathbb {R}}^n\) and \(\mathbf {A}=a \cdot \mathbf {I}\), with \(a \in {\mathbb {R}}\). If \(v \in W^1_p(\mu ,S)\) is such that \(\int _{S} \chi v = 0\), then
where the hidden constant depends only on \(\chi \), \(C_{p,\omega }\) and the radius \(\hat{r}\) of \(\hat{B}\), but is independent of \(\mathbf {A}\) and \(\mathbf {b}\).
Proof
Property (v) of Proposition 2.1 shows that \(\mu \in A_p({\mathbb {R}}^n)\) and \(C_{\mu ,p} = C_{\omega ,p}\). Given \(v \in W^1_p(\mu ,S)\), we define
Hölder’s inequality yields
which implies that \(\tilde{v} \in L^1(S)\) and \(\Vert \tilde{v} \Vert _{L^1(S)} \lesssim \Vert v\Vert _{L^p(\mu ,S)}^{p-1}\). Notice, in addition, that since \(\int _{S} \chi =1\), the function \(\tilde{v}\) has vanishing mean value.
Given \(1 < p < \infty \), we define \(q = -p'/p\), and we notice that \(q + p' = 1\) and \(p'(p-1) = p\). We estimate \(\Vert \tilde{v} \Vert _{L^{p'}(\mu ^{q},S)}\) as follows:
where we have used (3.2) together with the fact that \(\mu \in A_p({\mathbb {R}}^n)\) implies \(\mu ^q \in {L^{1}_{{\mathrm {loc}}}}({\mathbb {R}}^n)\) (see Proposition 2.1 (i)), whence \(\Vert \chi \Vert _{L^{p'}(\mu ^q,S)} \le \Vert \chi \Vert _{L^\infty (S)}\mu ^q(S)^{1/p'} \lesssim 1\).
Properties \(\mu ^q \in A_{p'}({\mathbb {R}}^n)\), that \(S\) is star-shaped with respect to \(\hat{B}\) and \(\tilde{v} \in L^{p'}(\mu ^{q},S)\) has vanishing mean value, suffice for the existence of a vector field \(\mathbf u \in {{\mathop {W}\limits ^{\circ }}^{1}_{p'}}(\mu ^q,S)\) satisfying
and,
where the hidden constant depends on \(C_{p',\mu ^q}\) and the radius \(r\) of \(\hat{B}\); see [33, Theorem 3.1].
Finally, since \(\int _{S} \chi v = 0\), the definition of \(\tilde{v}\) implies
Replacing \(\tilde{v}\) by \(-{{\text {div}}}~\mathbf{u }\), integrating by parts and using (3.3), we conclude
Invoking \(\Vert \tilde{v}\Vert _{L^{p'}(\mu ^q,S)}\lesssim \Vert v\Vert _{L^p(\mu ,S)}^{p-1}\) yields the desired inequality. \(\square \)
In Sect. 5 we construct an interpolation operator based on local averages. Consequently, the error estimates on an element \(T\) depend on the behavior of the function over a so-called patch of \(T\), which is not necessarily star shaped. Then, we need to relax the geometric assumptions on the domain \(S\) and let the vanishing mean property hold just in a subdomain. The following result is an adaptation of [60, Corollary 4.4].
Corollary 3.2
(weighted Poincaré inequality II) Let \(S=\cup _{i=1}^N S_i \subset {\mathbb {R}}^{n}\) be a connected domain and each \(S_i\) be star-shaped with respect to a ball \(B_i\). Let \(\chi _i\in C^0(\bar{S}_i)\) and \(\mu \) be as in Lemma 3.1. If \(v \in W^1_p(\mu , S)\) and \(v_i =\int _{S_i} v\chi _i\), then
where the hidden constant depends on \(\{\chi _i\}_{i=1}^N\), the radii \(r_i\) of \(B_i\), and the amount of overlap between the subdomains \(\{S_i\}_{i=1}^N\), but is independent of \(\mathbf {A}\) and \(\mathbf {b}\).
Proof
This is an easy consequence of Lemma 3.1 and [28, Theorem 7.1]. For completeness, we sketch the proof. It suffices to deal with two subdomains \(S_1,S_2\) and the overlapping region \(D = S_1\cap S_2\). We start from
Since \(v_1\) and \(v_2\) are constant
which together with
and (3.1) imply \(\Vert v - v_1\Vert _{L^p(\mu ,S_2)} \lesssim \Vert \nabla v\Vert _{L^p (\mu ,{S_1 \cup S_2})} \). This and (3.1) give (3.4) for \(i=1\), with a stability constant depending on the ratio \(\frac{\mu (S_2)}{\mu (D)}\). \(\square \)
4 Approximation theory in weighted Sobolev spaces
In this section, we introduce an averaged version of the Taylor polynomial and study its approximation properties in Muckenhoupt weighted Sobolev spaces. Our results are optimal and are used to obtain error estimates for the quasi-interpolation operator defined in Sect. 5 on simplicial and rectangular discretizations. The interpolation operator is built on local averages over stars, and so is similar to the one introduced in [28]. The main difference is that it is directly defined on the given mesh instead of using a reference element. This idea is fundamental in order to relax the regularity assumptions on the elements, which is what allows us to derive the anisotropic estimates on rectangular elements presented in Sect. 5.2.
4.1 Discretization
We start with some terminology and describe the construction of the underlying finite element spaces. In order to avoid technical difficulties we shall assume \(\partial \Omega \) is polyhedral. We denote by \({\fancyscript{T}}= \{T\}\) a partition, or mesh, of \(\Omega \) into elements \(T\) (simplices or cubes) such that
The mesh \({\fancyscript{T}}\) is assumed to be conforming or compatible: the intersection of any two elements is either empty or a common lower dimensional element. We denote by \({\mathbb {T}}\) a collection of conforming meshes, which are shape regular i.e., there exists a constant \(\sigma > 1\) such that, for all \({\fancyscript{T}}\in {\mathbb {T}},\)
where \(\sigma _T = h_T/\rho _T\) is the shape coefficient of \(T\). In the case of simplices, \(h_T = {{\mathrm{diam}}}(T)\) and \(\rho _T\) is the diameter of the sphere inscribed in \(T\); see, for instance, [13]. For the definition of \(h_T\) and \(\rho _T\) in the case of \(n\)-rectangles see [23].
In Sect. 5.2, we consider rectangular discretizations of the domain \(\Omega = (0,1)^n\) which satisfy a weaker regularity assumption and thus allow for anisotropy in each coordinate direction (cf. [31]).
Given a mesh \({\fancyscript{T}}\in {\mathbb {T}}\), we define the finite element space of continuous piecewise polynomials of degree \(m \ge 1\)
where, for a simplicial element \(T\), \(\mathcal {P}(T)\) corresponds to \(\mathbb {P}_m\) — the space of polynomials of total degree at most \(m\). If \(T\) is an \(n\)-rectangle, then \(\mathcal {P}(T)\) stands for \(\mathbb {Q}_m\) — the space of polynomials of degree not larger than \(m\) in each variable.
Given an element \(T \in {\fancyscript{T}}\), we denote by  and
and  the set of nodes and interior nodes of \(T\), respectively. We set
the set of nodes and interior nodes of \(T\), respectively. We set  and
and  . Then, any discrete function \(V \in {\mathbb {V}}({\fancyscript{T}})\) is characterized by its nodal values on the set
. Then, any discrete function \(V \in {\mathbb {V}}({\fancyscript{T}})\) is characterized by its nodal values on the set  . Moreover, the functions \(\phi _z \in {\mathbb {V}}({\fancyscript{T}})\),
. Moreover, the functions \(\phi _z \in {\mathbb {V}}({\fancyscript{T}})\),  , such that \(\phi _z(y)=\delta _{yz}\) for all
, such that \(\phi _z(y)=\delta _{yz}\) for all  are the canonical basis of \({\mathbb {V}}({\fancyscript{T}})\), and
are the canonical basis of \({\mathbb {V}}({\fancyscript{T}})\), and

The functions  are the so called shape functions.
are the so called shape functions.
Given  , the star or patch around \(z\) is \(S_{z} := \bigcup _{z \in T} T,\) and, for \(T \in {\fancyscript{T}}\), its patch is \(S_T := \bigcup _{z \in T} S_z.\) For each
, the star or patch around \(z\) is \(S_{z} := \bigcup _{z \in T} T,\) and, for \(T \in {\fancyscript{T}}\), its patch is \(S_T := \bigcup _{z \in T} S_z.\) For each  , we define \(h_{z} := \min \{h_{T}: z \in T\}\).
, we define \(h_{z} := \min \{h_{T}: z \in T\}\).
4.2 The averaged interpolation operator
We now develop an approximation theory in Muckenhoupt weighted Sobolev spaces, which is instrumental in Sect. 5. We define an averaged Taylor polynomial, built on local averages over stars and thus well defined for \(L^p(\omega ,\Omega )\)-functions. Exploiting the weighted Poincaré inequality derived in Sect. 3, we show optimal error estimates for constant and linear approximations. These results are the basis to extend these estimates to any polynomial degree via a simple induction argument in Sect. 4.4.
Let \(\psi \in C^{\infty }({\mathbb {R}}^{n})\) be such that \(\int \psi = 1\) and \({{\mathrm{supp}}}\psi \subset B\), where \(B\) denotes the ball in \({\mathbb {R}}^n\) of radius \(r = r(\sigma )\) and centered at zero. For  , we define the rescaled smooth functions
, we define the rescaled smooth functions
where \(m\ge 0\) is the polynomial degree. The scaling of \(\psi _z\) involving the factor \(m+1\) guarantees the property
for all nodes  (not just the interior vertices of \({\fancyscript{T}}\)) provided \(r\) is suitably chosen. This is because the distance from \(z\) to \(\partial S_z\) is proportional to \(h_z/(m+1)\) for shape regular meshes.
(not just the interior vertices of \({\fancyscript{T}}\)) provided \(r\) is suitably chosen. This is because the distance from \(z\) to \(\partial S_z\) is proportional to \(h_z/(m+1)\) for shape regular meshes.
Given a smooth function \(v\), we denote by \(P^m v(x,y)\) the Taylor polynomial of order \(m\) in the variable \(y\) about the point \(x\), i.e.,
For  , and \(v \in W^m_p(\omega ,\Omega )\), we define the corresponding averaged Taylor polynomial of order \(m\) of \(v\) about the node \(z\) as
, and \(v \in W^m_p(\omega ,\Omega )\), we define the corresponding averaged Taylor polynomial of order \(m\) of \(v\) about the node \(z\) as
Integration by parts shows that \(Q^m_{z} v\) is well-defined for functions in \(L^1(\Omega )\) [13, Proposition 4.1.12]. Proposition 2.3 then allows us to conclude that (4.5) is well defined for \(v \in L^p(\omega ,\Omega )\). Since \({{\mathrm{supp}}}\psi _{z} \subset S_{z}\), the integral appearing in (4.5) can be also written over \(S_{z}\). Moreover, we have the following properties of \(Q_{z}^m v\):
-
\(Q^m_{z} v\) is a polynomial of degree less or equal than \(m\) in the variable \(y\) (cf. [13, Proposition 4.1.9]).
-
\(Q^m_{z} v = Q^m_{z} Q^m_{z} v\), i.e., \(Q^m_{z}\) is invariant over \(\mathbb {P}_m\).
-
For any \(\alpha \) such that \(|\alpha | \le m \),
$$\begin{aligned} D^{\alpha } Q_{z}^m v = Q_{z}^{m-|\alpha |} D^{\alpha } v\qquad \forall v \in W_1^{|\alpha |}(B), \end{aligned}$$(4.6)(cf. [13, Proposition 4.1.17]). As a consequence of \(\omega \in A_p({\mathbb {R}}^n)\), together with Proposition 2.3, we have that (4.6) holds for \(v\) in \(W_p^{|\alpha |}(\omega ,B)\).
The following stability result is important in the subsequent analysis.
Lemma 4.1
(stability of \(Q_z^m\)) Let \(\omega \in A_{p}({\mathbb {R}}^n)\) and  . If \(v \in W_p^{k}(\omega ,S_z)\), with \( 0 \le k \le m\), we have the following stability result
. If \(v \in W_p^{k}(\omega ,S_z)\), with \( 0 \le k \le m\), we have the following stability result
Proof
Using the definition of the averaged Taylor polynomial (4.5), we arrive at
This implies estimate (4.7) if \(k=m\). Otherwise, integration by parts on the higher derivatives \(D^{\alpha } v\) with \(k < |\alpha | \le m\), \(\psi _z = 0\) on \(\partial S_z\), the fact that \(D^{\alpha } \psi \) is uniformly bounded on \(\mathbb {R}^n\), the estimate \(|y-x| \lesssim h_z\) for all \(x,y \in S_z\), together with Hölder’s inequality, yield (4.7). \(\square \)
Given \(\omega \in A_p({\mathbb {R}}^n)\) and \(v \in W_p^{m+1}(\omega ,\Omega )\) with \(m \ge 0\), in the next section we derive approximation properties of the averaged Taylor polynomial \(Q_{z}^m v\) in the weighted \(W_p^k(\omega ,\Omega )\)-norm, with \(0 \le k \le m\), via a weighted Poincaré inequality and a simple induction argument. Consequently, we must first study the approximation properties of \(Q_{z}^0 v\), the weighted average of \(v \in L^p(\omega ,\Omega )\), which for  reads
reads
4.3 Weighted \(L^p\)-based error estimates
We start by adapting the proofs of [31, Lemma 2.3] and [60, Lemma 4.5] to obtain local approximation estimates in the weighted \(L^p\)-norm for the polynomials \(Q^0_{z}v\) and \(Q^1_{z}v\).
Lemma 4.2
(weighted \(L^p\)-based error estimates) Let  . If \(v \in W^1_p(\omega ,S_z)\), then we have
. If \(v \in W^1_p(\omega ,S_z)\), then we have
If \(v \in W^2_p(\omega ,S_z)\) instead, the following estimate holds
for \(j=1,\dots ,n\). In both inequalities, the hidden constants depend only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
Proof
Define the mapping  by
by
the star  and the function \(\bar{v}(\bar{x}) = v(x)\). Set \(\bar{Q}^0\bar{v}= \int \bar{v} \psi {\, {\mathrm{d}}}\bar{x},\) where \(\psi \) is the smooth function introduced in Sect. 4.2.
and the function \(\bar{v}(\bar{x}) = v(x)\). Set \(\bar{Q}^0\bar{v}= \int \bar{v} \psi {\, {\mathrm{d}}}\bar{x},\) where \(\psi \) is the smooth function introduced in Sect. 4.2.
Notice that \({{\mathrm{supp}}}\psi \subset \bar{S}_{z}\). Consequently, in the definition of \(\bar{Q}^0 \bar{v}\), integration takes place over \(\bar{S}_{z}\) only. Using the mapping  , we have
, we have
and, since \(\int _{\bar{S}_z} \psi {\, {\mathrm{d}}}\bar{x} = 1\),
Define the weight  . In light of property (v) in Proposition 2.1 we have \(\bar{\omega }_{z} \in A_p({\mathbb {R}}^n)\) and \(C_{p,\bar{\omega }_{z}}=C_{p,\omega }\). Changing variables we get
. In light of property (v) in Proposition 2.1 we have \(\bar{\omega }_{z} \in A_p({\mathbb {R}}^n)\) and \(C_{p,\bar{\omega }_{z}}=C_{p,\omega }\). Changing variables we get
As a consequence of the shape regularity assumption (4.1), \({{\mathrm{diam}}}\bar{S}_{z} \approx 1\). Then, in view of (4.11), we can apply Lemma 3.1 to \(\bar{v} - \bar{Q}^0\bar{v}\) over \(S = \bar{S}_{z}\), with \(\mu = \bar{\omega }_{z}\) and \(\chi = \psi \), to conclude
where the hidden constant depends only on \(\sigma \), \(C_{p,\bar{\omega }_z}\) and \(\psi \). Inserting this estimate into (4.12) and changing variables with \({\mathcal {F}}_z^{-1}\) to get back to \(\bar{S}_{z}\) we get (4.9).
In order to prove (4.10), we modify \(\mathcal {F}_z\) and \(\bar{S}_{z}\) appropriately and define
We observe that \(Q^1_{z}v(y) = \bar{Q}^1\bar{v}(\bar{y})\), where \(Q^1_{z}v\) is defined by (4.5). Since \(\partial _{\bar{y}_i} \bar{Q}^1\bar{v}(\bar{y}) =\int _{\bar{S}_{z}} \partial _{\bar{x}_i} \bar{v}(\bar{x})\psi (\bar{x}) {\, {\mathrm{d}}}\bar{x}\) is constant for \(i \in \{1,\cdots , n\}\), we have the vanishing mean value property
This, together with Lemma 3.1, leads to (4.10). \(\square \)
The following result is an optimal error estimate in the \(L^p\)-weighted norm for the averaged Taylor polynomial \(Q_{z}^1v\), which is instrumental to study \(Q_{z}^m v\) (\(m \ge 0\)).
Lemma 4.3
(weighted \(L^p\)-based error estimate for \(Q_{z}^1\)) Let  . If \(v \in W^2_p(\omega ,S_z)\), then the following estimate holds
. If \(v \in W^2_p(\omega ,S_z)\), then the following estimate holds
where the hidden constant depends only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
Proof
Since
and \(\nabla (v-Q^1_{z}v) = \nabla v - Q^0_{z}\nabla v\) from (4.6), we can apply (4.9) twice to obtain
So it remains to estimate the term \(R^1_z(v) := Q^0_{z}( Q^1_z v - v)\). Since \(Q_{z}^0 v = Q_{z}^0 Q_{z}^0 v \), we notice that \(R^1_z(v) = Q^0_{z} ( Q^1_z v - Q^0_{z} v )\). Then, using the definition of the averaged Taylor polynomial given by (4.5), we have
We exploit the crucial cancellation property \(R^1_z(p) = 0\) for all \(p \in \mathbb {P}_1\) as follows: \(R^1_z(v) = R^1_z(v - Q_{z}^1 v) = 0\). This yields
Applying Hölder inequality to the innermost integral \(I(y)\) leads to
This is combined with \(\int _{S_z} \psi _z(y) {\, {\mathrm{d}}}y = 1\) and \(\Vert \psi _{z}\Vert _{L^{p'}(\omega ^{-{p'\!/p}},S_{z})} \Vert 1\Vert _{L^p(\omega ,S_{z})} \lesssim 1,\) which follows from the definition of \(\psi _{z}\) and the definition (2.2) of the \(A_p\)-class, to arrive at
This yields the desired estimate (4.13). \(\square \)
4.4 Induction argument
In order to derive approximation properties of the averaged Taylor polynomial \(Q_{z}^m v\) for any \(m \ge 0\), we apply an induction argument. We assume the following estimate as induction hypothesis:
Notice that, for \(m=1\), the induction hypothesis is exactly (4.10), while for \(m=2\) it is given by Lemma 4.3. We have the following general result for any \(m \ge 0\).
Lemma 4.4
(weighted \(L^p\)-based error estimate for \(Q_{z}^m\)) Let  and \(m \ge 0\). If \(v \in W^{m+1}_p(\omega ,S_z)\), then we have the following approximation result
and \(m \ge 0\). If \(v \in W^{m+1}_p(\omega ,S_z)\), then we have the following approximation result
where the hidden constant depends only on \(C_{p,\omega }\), \(\sigma \), \(\psi \) and \(m\).
Proof
We proceed as in the proof of Lemma 4.3. Notice, first of all, that
The induction hypothesis (4.15) yields
Since \(D^\alpha Q^m_z v = Q^0_z D^\alpha v\) for all \(|\alpha |=m\), according to property (4.6), the estimate (4.9) yields \(| v - Q^m_z v |_{W^m_p(\omega ,S_z)} \lesssim h_z | v |_{W^{m+1}_p(\omega ,S_z)}\), and then
It thus remains to bound the term
Since \(Q_{z}^{m-1} Q_{z}^{m-1} v = Q_{z}^{m-1} v\), writing \(Q^m_z = Q^{m-1}_z + \sum _{|\beta |=m} T_z^\beta \) with
we obtain
This representation allows us to write
with
Finally, we notice the following cancellation property: \(Q^m_z p = p\) for all \(p\in \mathbb {P}_m\), whence \(R^m_z (p) = 0\). Consequently \(R^m_z (v) = R^m_z (v - Q^m_z v)\) implies
Combining the identity \( D^\beta Q_{z}^m v = Q_{z}^0 D^\beta v\), with (4.9) and the bound
we infer that
This concludes the proof. \(\square \)
The following corollary is a simple consequence of Lemma 4.4.
Corollary 4.5
(weighted \(W_p^k\)-based error estimate for \(Q_{z}^m\)) Let  . If \(v \in W^{m+1}_p(\omega ,S_z)\) with \(m \ge 0\), then
. If \(v \in W^{m+1}_p(\omega ,S_z)\) with \(m \ge 0\), then
where the hidden constant depends only on \(C_{p,\omega }\), \(\sigma \), \(\psi \) and \(m\).
Proof
For \(k=0\), the estimate (4.17) is given by Lemma 4.4, while for \(k= m +1 \),
For \( 0 < k < m+1\), we employ property (4.6) of \(D^\alpha Q_{z}^m v\) with \(|\alpha |=k\) to write
Therefore, applying estimate (4.16) to \(\Vert D^{\alpha } v - Q^{m-k}_{z} D^{\alpha }v \Vert _{L^p(\omega ,S_z)}\), we obtain
which is the asserted estimate. \(\square \)
5 Weighted interpolation error estimates
In this section we construct a quasi-interpolation operator \(\Pi _{{\fancyscript{T}}}\), based on local averages over stars. This construction is well defined for functions in \(L^1(\Omega )\), and thus for functions in the weighted space \(L^p(\omega ,\Omega )\). It is well known that this type of quasi-interpolation operator is important in the approximation of nonsmooth functions without point values because the Lagrange interpolation operator is not even defined [24, 65]. Moreover, averaged interpolation has better approximation properties than the Lagrange interpolation for anisotropic elements [1]. We refer the reader to [9, 31, 60] for applications of quasi-interpolation.
The construction of \(\Pi _{\fancyscript{T}}\) is based on the averaged Taylor polynomial defined in (4.5). In Sect. 5.1, using the approximation estimates derived in Sect. 4 together with an invariance property of \(\Pi _{{\fancyscript{T}}}\) over the space of polynomials, we derive optimal error estimates for \(\Pi _{{\fancyscript{T}}}\) in Muckenhoupt weighted Sobolev norms on simplicial discretizations. The case of rectangular discretizations is considered in Sect. 5.2.
Given \(\omega \in A_p({\mathbb {R}}^n)\) and \(v \in L^p(\omega ,\Omega )\), we recall that \(Q^m_z v\) is the averaged Taylor polynomial of order \(m\) of \(v\) over the node \(z\); see (4.5). We define the quasi-interpolant \(\Pi _{{\fancyscript{T}}}v\) as the unique function of \({\mathbb {V}}({\fancyscript{T}})\) that satisfies \(\Pi _{{\fancyscript{T}}}v(z) = Q^m_z v(z)\) if  , and \(\Pi _{{\fancyscript{T}}}v(z) = 0\) if
, and \(\Pi _{{\fancyscript{T}}}v(z) = 0\) if  , i.e.,
, i.e.,

Optimal error estimates for \(\Pi _{{\fancyscript{T}}}\) rely on its stability, which follows from the stability of \(Q_z^m\) obtained in Lemma 4.1.
Lemma 5.1
(stability of \(\Pi _{\fancyscript{T}}\)) Let \(v \in W_p^{k}(\omega ,S_T)\) with \(0 \le k \le m+1\) and \(T \in {\fancyscript{T}}\). Then, the quasi-interpolant operator \(\Pi _{{\fancyscript{T}}}\) defined by (5.1) satisfies the following local stability bound
Proof
Using the definition of \(\Pi _{{\fancyscript{T}}}\) given by (5.1), we have

We resort to Lemma 4.1 to derive

Since \(|D^k \phi _z| \lesssim h_z^{-k}\) on \(S_T\) and \(\omega \in A_p({\mathbb {R}}^{n})\), we obtain
which, given the definition of \(S_T\), the shape regularity of \({\fancyscript{T}}\), and the finite overlapping property of stars imply (5.2). \(\square \)
5.1 Interpolation error estimates on simplicial discretizations
The quasi-interpolant operator \(\Pi _{{\fancyscript{T}}}\) is invariant over the space of polynomials of degree \(m\) on simplicial meshes: \(\Pi _{\fancyscript{T}}v|_{S_z} = v\) for \(v \in \mathbb {P}_m(S_z)\) and  such that \(\partial S_z \cap \partial \Omega = \emptyset \). Consequently,
such that \(\partial S_z \cap \partial \Omega = \emptyset \). Consequently,
This property, together with (4.5), yields optimal interpolation estimates for \(\Pi _{{\fancyscript{T}}}\).
Theorem 5.2
(interpolation estimate on interior simplices) Given \(T \in {\fancyscript{T}}\) such that \(\partial T \cap \partial \Omega = \emptyset \) and \(v \in W_p^{m+1}(\omega ,S_T)\), we have the following interpolation error estimate
where the hidden constant depends only on \(C_{p,\omega }\), \(\sigma \), \(\psi \) and \(m\).
Proof
Given \(T \in {\fancyscript{T}}\), choose a node  . Property (5.3) yields,
. Property (5.3) yields,
Combining the stability of \(\Pi _{{\fancyscript{T}}}\) given by (5.2) together with (4.17) implies
which is exactly (5.4). \(\square \)
By using the fact that, \(v \in W^{m+1}_p(\omega , \Omega ) \cap {{\mathop {W}\limits ^{\circ }}^{1}_{p}}(\omega ,\Omega )\) implies \(\Pi _{\fancyscript{T}}v_{|\partial \Omega } = 0\) we can extend the results of Theorem 5.2 to boundary elements. The proof is an adaption of standard techniques and, in order to deal with the weight, those of the aforementioned Theorem 5.2. See also Theorem 5.10 below.
Theorem 5.3
(interpolation estimates on Dirichlet simplices) Let \( v \in {{\mathop {W}\limits ^{\circ }}^{1}_{p}}(\omega ,\Omega ) \cap W^{m+1}_p(\omega , \Omega )\). If \(T \in {\fancyscript{T}}\) is a boundary simplex, then (5.4) holds with a constant that depends only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
We are now in the position to write a global interpolation estimate.
Theorem 5.4
(global interpolation estimate over simplicial meshes) Given \({\fancyscript{T}}\in {\mathbb {T}}\) and \(v \in W_p^{m+1}(\omega ,\Omega )\), we have the following global interpolation error estimate
for \(k = 0,\ldots ,m+1\), where the hidden constant depends only on \(C_{p,\omega }\), \(\sigma \), \(\psi \) and \(m\).
Proof
Raise (5.4) to the \(p\)-th power and add over all \(T \in {\fancyscript{T}}\). The finite overlapping property of stars of \({\fancyscript{T}}\) yields the result. \(\square \)
5.2 Anisotropic interpolation estimates on rectangular meshes
Narrow or anisotropic elements are those with disparate sizes in each direction. They are necessary, for instance, for the optimal approximation of functions with a strong directional-dependent behavior such as line and edge singularities, boundary layers, and shocks (see [31, 32, 60]).
Inspired by [31], here we derive interpolation error estimates assuming only that neighboring elements have comparable sizes, thus obtaining results which are valid for a rather general family of anisotropic meshes. Since symmetry is essential, we assume that \(\Omega = (0,1)^n\), or that \(\Omega \) is any domain which can be decomposed into \(n\)-rectangles. We use below the notation introduced in [31].
We assume that the mesh \({\fancyscript{T}}\) is composed of rectangular elements \(R\), with sides parallel to the coordinate axes. By  we denote a node or vertex of the triangulation \({\fancyscript{T}}\) and by \(S_{\mathtt{v }}\), \(S_R\) the associated patches; see Sect. 4.1. Given \(R \in {\fancyscript{T}}\), we define \(h_{R}^i\) as the length of \(R\) in the \(i\)-th direction and, if
we denote a node or vertex of the triangulation \({\fancyscript{T}}\) and by \(S_{\mathtt{v }}\), \(S_R\) the associated patches; see Sect. 4.1. Given \(R \in {\fancyscript{T}}\), we define \(h_{R}^i\) as the length of \(R\) in the \(i\)-th direction and, if  , we define \(h_{\mathtt{v }}^i = \min \{ h_{R}^i: \mathtt{v }\in R\}\) for \(i=1,\cdots ,n\). The finite element space is defined by (4.2) with \(\mathcal {P} = {\mathbb {Q}}_1\).
, we define \(h_{\mathtt{v }}^i = \min \{ h_{R}^i: \mathtt{v }\in R\}\) for \(i=1,\cdots ,n\). The finite element space is defined by (4.2) with \(\mathcal {P} = {\mathbb {Q}}_1\).
We assume the following weak shape regularity condition: there exists a constant \(\sigma > 1\), such that if \(R,S \in {\fancyscript{T}}\) are neighboring elements, we have
Whenever \(\mathtt{v }\) is a vertex of \(R\) the shape regularity assumption (5.6) implies that \(h_{\mathtt{v }}^i\) and \(h_{R}^i\) are equivalent up to a constant that depends only on \(\sigma \). We define
which, owing to (5.6) and \(r \le 1/\sigma \), satisfies \({{\mathrm{supp}}}\psi _{\mathtt{v }} \subset S_{\mathtt{v }}\). Notice that this function incorporates a different length scale on each direction \(x_i\), which will prove useful in the study of anisotropic estimates.
Given \(\omega \in A_p({\mathbb {R}}^n)\), and \(v \in L^p(\omega ,\Omega )\), we define \(Q^1_{\mathtt{v }} v\), the first degree regularized Taylor polynomial of \(v\) about the vertex \(\mathtt{v }\) as in (4.5). We also define the quasi-interpolation operator \(\Pi _{{\fancyscript{T}}}\) as in (5.1), i.e., upon denoting by \(\lambda _{\mathtt{v }}\) the Lagrange nodal basis function of \({\mathbb {V}}({\fancyscript{T}})\), \(\Pi _{{\fancyscript{T}}} v\) reads

The finite element space \({\mathbb {V}}({\fancyscript{T}})\) is not invariant under the operator defined in (5.7). Consequently, we cannot use the techniques for simplicial meshes developed in Sect. 5.1. This, as the results below show, is not a limitation to obtain interpolation error estimates.
Lemma 5.5
(anisotropic \(L^p\)-weighted error estimates I) Let  . If \(v \in W^1_p(\omega ,S_{\mathtt{{v} }})\), then we have
. If \(v \in W^1_p(\omega ,S_{\mathtt{{v} }})\), then we have
If \(v \in W^2_p(\omega ,S_{\mathtt{{v} }})\) instead, then the following estimate holds
for \(j=1,\dots ,n\). In both inequalities, the hidden constants depend only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
Proof
To exploit the symmetry of the elements we define the map

and proceed exactly as in the proof of Lemma 4.2. \(\square \)
Lemma 5.5, in conjunction with the techniques developed in Lemma 4.3 give rise the second order anisotropic error estimates in the weighted \(L^p\)-norm.
Lemma 5.6
(anisotropic \(L^p\)-weighted error estimate II) Let  . If \(v \in W^2_p(\omega ,S_{\mathtt{{v} }})\), then we have
. If \(v \in W^2_p(\omega ,S_{\mathtt{{v} }})\), then we have
where the hidden constant in the inequality above depends only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
Proof
Recall that, if \(R^1_{\mathtt{v }}(v) = Q^0_{\mathtt{v }}( Q^1_\mathtt{v }v - v)\), then we can write
Applying estimates (5.8) and (5.9) successively, we see that
It remains then to bound \(R^1_{\mathtt{v }}(v)\). We proceed as in the proof of (4.14) in Lemma 4.3. The definition (4.5) of the averaged Taylor polynomial, together with the cancellation property \(R^1_{\mathtt{v }}(v) = R^1_{\mathtt{v }}(v - Q_{\mathtt{v }}^1 v)\), implies
Combining (5.9) with the inequality \(\Vert \psi _{\mathtt{v }}\Vert _{L^{p'}(\omega ^{-{p'\!/p}},S_{\mathtt{v }})} \Vert 1\Vert _{L^p(\omega ,S_{\mathtt{v }})} \lesssim 1,\) which follows from the definition of \(\psi _{\mathtt{v }}\) and the definition (2.2) of the \(A_p\)-class, yields
and leads to the asserted estimate (5.11). \(\square \)
The anisotropic error estimate (5.8) together with the weighted \(L^p\) stability of the interpolation operator \(\Pi _{{\fancyscript{T}}}\), enables us to obtain anisotropic weighted \(L^p\) interpolation estimates, as shown in the following Theorem.
Theorem 5.7
(anisotropic \(L^p\)-weighted interpolation estimate I) Let \({\fancyscript{T}}\) satisfy (5.6) and \(R \in {\fancyscript{T}}\). If \(v \in L^p(\omega ,S_{R})\), we have
If, in addition, \(w \in W^1_p(\omega ,S_{R})\) and \(\partial R \cap \partial \Omega = \emptyset \), then
The hidden constants in both inequalities depend only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
Proof
The local stability (5.12) of \(\Pi _{{\fancyscript{T}}}\) follows from Lemma 5.1 with \(k=0\). Let us now prove (5.13). Choose a node  . Since \(Q^0_{\mathtt{v }}v\) is constant, and \(\partial R \cap \partial \Omega = \emptyset \), \( \Pi _{{\fancyscript{T}}} Q^0_{\mathtt{v }}v = Q^0_{\mathtt{v }}v\) over \(R\). This, in conjunction with estimate (5.12), allows us to write
. Since \(Q^0_{\mathtt{v }}v\) is constant, and \(\partial R \cap \partial \Omega = \emptyset \), \( \Pi _{{\fancyscript{T}}} Q^0_{\mathtt{v }}v = Q^0_{\mathtt{v }}v\) over \(R\). This, in conjunction with estimate (5.12), allows us to write
The desired estimate (5.13) now follows from Corollary 3.2. \(\square \)
To prove interpolation error estimates on the first derivatives for interior elements we follow [31, Theorem 2.6] and use the symmetries of a cube, thus handling the anisotropy in every direction separately. We start by studying the case of interior elements.
Theorem 5.8
(anisotropic \(W^1_p\)-weighted interpolation estimates) Let \(R \in {\fancyscript{T}}\) be such that \(\partial R \cap \partial \Omega = \emptyset \). If \(v \in W^1_p(\omega ,S_R)\) we have the stability bound
If, in addition, \(v \in W^2_p(\omega ,S_R)\) we have, for \(j=1,\cdots ,n\),
The hidden constants in the inequalities above depend only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
Proof
Let us bound the derivative with respect to the first argument \(x_1\). The other ones follow from similar considerations. As in [31, Theorem 2.5], to exploit the geometry of \(R\), we label its vertices in an appropriate way: vertices that differ only in the first component are denoted \(\mathtt{v }_i\) and \(\mathtt{v }_{i+2^{n-1}}\) for \(i = 1,\dots , 2^{n-1}\); see Fig. 1 for the three-dimensional case.

An anisotropic cube with sides parallel to the coordinate axes and the labeling of its vertices. The numbering of the vertices proceeds recursively as follows: a cube in dimension \(m\) is obtained as the Cartesian product of an \((m-1)\)-dimensional cube with vertices \(\{\mathtt{v }_i\}_{i=1}^{2^{m-1}}\) and an interval, and the new vertices are \(\{\mathtt{v }_{i+2^{m-1}}\}_{i=1}^{2^{m-1}}\)
Clearly \(v - \Pi _{{\fancyscript{T}}} v =(v - Q^1_{\mathtt{v }_1}v) + (Q^1_{\mathtt{v }_1}v-\Pi _{{\fancyscript{T}}} v)\), and the difference \(v - Q^1_{\mathtt{v }_1}v\) is estimated by Lemma 5.5. Consequently, it suffices to consider \(q = Q^1_{\mathtt{v }_1}v-\Pi _{{\fancyscript{T}}} v \in {\mathbb {Q}}_1(R)\). Thanks to the special labeling of the vertices we have that \(\partial _{x_1} \lambda _{\mathtt{v }_{i+2^{n-1}}} = -\partial _{x_1}\lambda _{\mathtt{v }_{i}}\). Therefore
so that
This shows that it suffices to estimate \(\delta q(\mathtt{v }_1) = q(\mathtt{v }_1) - q(\mathtt{v }_{1+2^{n-1}})\). The definitions of \(\Pi _{{\fancyscript{T}}}\), \(q\), and the averaged Taylor polynomial (4.5), imply that
whence employing the operation \(\circ \) defined in (2.1) and changing variables, we get
Define
\(\theta = (\theta _1,0,\dots ,0)\) and, for \(t \in [0,1]\), the function \(F_z(t) = P^1 v(\mathtt{v }_{1} - h_{\mathtt{v }_{1}} \circ z + t \theta ,\mathtt{v }_{1+2^{n-1}})\). Since, for \(i=2,\ldots ,n\) we have that \(h_{\mathtt{v }_1}^i = h_{\mathtt{v }_{1+2^{n-1}}}^i\) and \(\mathtt{v }_1^i = \mathtt{v }_{1+2^{n-1}}^i\), by using the definition of \(\theta \) we arrive at
and consequently
Since \(\psi \) is bounded and \(B = {{\mathrm{supp}}}\psi \subset B(0,1)\), it suffices to bound the integral
Invoking the definition of \(F_z\), we get \(F_z'(t) = \nabla P^1 v(\mathtt{v }_1 - h_{\mathtt{v }_1} \circ z + t \theta ,\mathtt{v }_{1+2^{n-1}}) \cdot \theta ,\) which, together with the definition of the polynomial \(P^1 v\) given by (4.4), yields
Now, using that \(|z| \le 1\), \(0\le t \le 1\), and the definition of \(\theta \), we easily see that \(|\theta |=|\theta _1|\lesssim h_{\mathtt{v }_1}^1\) as well as \(|\mathtt{v }_{1+2^{n-1}}^1 -\mathtt{v }_1 + h^1_{\mathtt{v }_1} z_1 - t \theta _1| \lesssim h^1_{\mathtt{v }_1}\) and \(|\mathtt{v }_{1+2^{n-1}}^i - \mathtt{v }_{1}^i - h^i_{\mathtt{v }_1} z_i | \lesssim h^i_{\mathtt{v }_1}\) for \(i=2,\dots n\), whence
Changing variables via \(y = \mathtt{v }_1 - h_{\mathtt{v }_1} \circ z + t \theta \), we obtain
where we have used that the support of \(\psi \) is mapped into \(S_{\mathtt{v }_1} \subset S_{R}\). Hölder’s inequality implies
which combined with \(\Vert \partial _{x_1} \lambda _{\mathtt{v }_1}\Vert _{L^p(\omega ,R) } \Vert 1 \Vert _{L^{p'}(\omega ^{-{p'\!/p}},S_R)}\lesssim h_{\mathtt{v }_1}^{2} \dots h_{\mathtt{v }_1}^{n}\), because \(\omega \in A_p({\mathbb {R}}^n)\), gives the following bound for the first term in (5.16)
This readily yields (5.15).
The estimate (5.14) follows along the same arguments as in [60, Theorem 4.7]. In fact, by the triangle inequality
The estimate of the first term on the right hand side of (5.18) begins by noticing that the definition of \(\psi _{\mathtt{v }_1}\) and the Definition 2.2 of the \(A_p\) class imply
This, together with the definition (4.5) of regularized Taylor polynomial \(Q^1_{\mathtt{v }_1}v\), yields
To estimate the second term of the right hand side of (5.18), we integrate by parts (5.17), using that \(\psi _{\mathtt{v }_i} =0\) on \(\partial S_{\mathtt{v }_i}\) for \(i=1,\dots ,n\), to get
In contrast to (5.17), we have now created differences which involve \(v(x)\) instead of \(\nabla v(x)\). However, the same techniques used to derive (5.15) yield
which, since \(\Vert \partial _{x_1} \lambda _{\mathtt{v }_1} \Vert _{L^{p'}(\omega ^{-{p'\!/p}},S_R)} \Vert 1\Vert _{L^p(\omega ,S_R)} \lesssim h_{\mathtt{v }_1}^{2} \dots h_{\mathtt{v }_1}^{n}\), results in
Replacing this estimate in (5.16), we get
which implies the desired result (5.14). This completes the proof. \(\square \)
Let us now derive a second order anisotropic interpolation error estimates for the weighted \(L^p\)-norm, which is novel even for unweighted norms. For the sake of simplicity, and because the arguments involved are rather technical (as in Theorem 5.8), we prove the result in two dimensions. However, analogous results can be obtained in three and more dimensions by using similar arguments.
Theorem 5.9
(anisotropic \(L^p\)-weighted interpolation estimate II) Let \({\fancyscript{T}}\) satisfy (5.6) and \(R \in {\fancyscript{T}}\) such that \(\partial R \cap \partial \Omega = \emptyset \). If \(v \in W^2_p(\omega ,S_{R})\), then we have
where the hidden constant in the inequality above depends only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
Proof
To exploit the symmetry of \(R\), we label its vertices of \(R\) according to Fig. 1: \(\mathtt{v }_2=\mathtt{v }_1+(a,0), \mathtt{v }_3=\mathtt{v }_1+(0,b),\mathtt{v }_4=\mathtt{v }_1+(a,b)\). We write \(v - \Pi _{{\fancyscript{T}}} v = (v - Q^1_{\mathtt{v }_1} v) + (Q^1_{\mathtt{v }_1} v - \Pi _{{\fancyscript{T}}} v)\). The difference \(v - Q^1_{\mathtt{v }_1} v\) is estimated by Lemma 5.6. Consequently, it suffices to estimate \(q = Q^1_{\mathtt{v }_1} v - \Pi _{{\fancyscript{T}}} v\).
Since \(q \in {\mathbb {V}}({\fancyscript{T}})\),
and we only need to deal with \(q(\mathtt{v }_i)\) for \(i=1,\dots ,4\). Since \(q(\mathtt{v }_1) = 0\), in accordance with the definition (5.7) of \(\Pi _{{\fancyscript{T}}}\), we just consider \(i =2\). Again, by (5.7), we have
which, together with the definition of the averaged Taylor polynomial (4.5) and a change of variables, yields
To estimate this integral, we define \(\theta = (\theta _1,0)\), where \(\theta _1 = \mathtt{v }_1^1 - \mathtt{v }_2^1 + (h^1_{\mathtt{v }_2} - h^1_{\mathtt{v }_1})z_1\), and the function \(F_z(t) = P^1 v(\mathtt{v }_2 - h_{\mathtt{v }_2} \circ z + t \theta , \mathtt{v }_2)\). Exploiting the symmetries of \(R\), i.e., using that \(\mathtt{v }_1^2 = \mathtt{v }_2^2\) and \(h_{\mathtt{v }_1}^2 = h_{\mathtt{v }_2}^2\), we arrive at
By using the definition of the Taylor polynomial \(P^1 v\) given in (4.4), we obtain
which, together with the definition of \(\theta \) and the inequalities \(| \theta _1 | \lesssim h_{\mathtt{v }_2}^1\), \(| h^1_{\mathtt{v }_2} z_1 - t \theta _1 | \lesssim h^1_{\mathtt{v }_2} \) and \(| h^2_{\mathtt{v }_2} z_2 | \lesssim h_{\mathtt{v }_2}^2\), implies
The change of variables \(y = \mathtt{v }_2 - h_{\mathtt{v }_2} \circ z + t \theta \) yields
where we used Hölder inequality, that the support of \(\psi \) is mapped into \(S_R\), and \(\psi \in L^{\infty }({\mathbb {R}}^n)\). Finally, using the \(A_p\)-condition, we conclude
The same arguments above apply to the remaining terms in (5.20). For the term labeled \(i=3\), we obtain
whereas for the term labeled \(i=4\), rewritten first in the form
we deduce
Finally, replacing the previous estimates back into (5.20), and using the shape regularity properties \(h_{\mathtt{v }_i}^j \approx h_{R}^j \) for \(i=1,\dots ,4\) and \(j=1,2\), which result from (5.6), we arrive at the desired anisotropic estimate (5.19). \(\square \)
Let us comment on the extension of the interpolation estimates of Theorem 5.8 to elements that intersect the Dirichlet boundary, where the functions to be approximated vanish. The proof is very technical and is an adaptation of the arguments of [31, Theorem 3.1] and [60, Theorem 4.8], together with the ideas involved in the proof of Theorem 5.8 to deal with the Muckenhoupt weight \(\omega \in A_p({\mathbb {R}}^n)\).
Theorem 5.10
(stability and local interpolation: Dirichlet elements) Let \(R \in {\fancyscript{T}}\) be a boundary element. If \( v \in W^1_p(\omega ,S_R)\) and \(v = 0\) on \(\partial R \cap \partial \Omega \), then we have
Moreover, if \( v \in W^2_p(\omega ,S_R)\), then
for \(j=1,\dots ,n\). The hidden constants in both inequalities depend only on \(C_{p,\omega }\), \(\sigma \) and \(\psi \).
6 Interpolation estimates for different metrics
Given \(v \in W^1_p(\omega ,S_T)\) with \(\omega \in A_{p}({\mathbb {R}}^n)\) and \(p \in (1,\infty )\), the goal of this section is to derive local interpolation estimates for \(v\) in the space \(L^q(\rho ,T)\), with weight \(\rho \ne \omega \) and Lebesgue exponent \(q \ne p\). To derive such an estimate, it is necessary to ensure that the function \(v\) belongs to \(L^q(\rho ,T)\), that is, we need to discuss embeddings between weighted Sobolev spaces with different weights and Lebesgue exponents.
Embedding results in spaces of weakly differentiable functions are fundamental in the analysis of partial differential equations. They provide some basic tools in the study of existence, uniqueness and regularity of solutions. To the best of our knowledge, the first to prove such a result was Sobolev in 1938 [67]. Since then, a great deal of effort has been devoted to studying and improving such inequalities; see, for instance, [12, 59, 71]. In the context of weighted Sobolev spaces, there is an abundant literature that studies the dependence of this result on the properties of the weight; see [38, 41, 45–49].
Let us first recall the embedding results in the classical case, which will help us draw an analogy for the weighted case. We recall the Sobolev number of \(W^m_p(\Omega )\)
which governs the scaling properties of the seminorm \(| v |_{W^m_p(\Omega )}\): the change of variables \(\hat{x} = x/h\) transforms \(\Omega \) into \(\hat{\Omega }\) and \(v\) into \(\hat{v}\), while the seminorms scale as
With this notation classical embeddings [40, Theorem 7.26] can be written in a concise way: if \(\Omega \) denotes an open and bounded domain with Lipschitz boundary, \(1 \le p < n\) and \({{\mathrm{sob}}}(W^1_p) \ge {{\mathrm{sob}}}(L^q)\), then \({{\mathop {W}\limits ^{\circ }}_{p}^{1}}(\Omega ) \hookrightarrow L^{q}(\Omega )\) and
for all \(v \in {{\mathop {W}\limits ^{\circ }}_{p}^{1}}(\Omega )\). When \({{\mathrm{sob}}}(W^1_p) > {{\mathrm{sob}}}(L^q)\) the embedding is compact. Results analogous to (6.1) in the weighted setting have been studied in [19, 38, 57, 62] for \(n>1\). For \(n=1\), if \(\Omega = (0,a)\), \(v \in W^1_p(\omega ,\Omega )\), and \(\omega \in A_p({\mathbb {R}}^n)\), Proposition 2.3 yields \(v \in W_1^1(\Omega )\). Consequently \(v \in L^{\infty }(\Omega )\), and then \(v \in L^q(\rho ,\Omega )\) for any weight \(\rho \) and \(q \in (1,\infty )\). However, to gain intuition on the explicit dependence of the embedding constant in terms of the weights and the Lebesgue measure of the domain, let us consider the trivial case \(n=1\) in more detail. To simplify the discussion assume that \(v(0) = v(a) = 0\). We thus have
whence invoking the definition of the Muckenhoupt class (2.2) we realize that
The extension of this result to the \(n\)-dimensional case has been studied in [19, 38, 57] and is reported in the next two theorems; see [19] for a discussion.
Theorem 6.1
(embeddings in weighted spaces) Let \(\omega \in A_p({\mathbb {R}}^n)\), \(p \in (1,q]\), and \(\rho \) be a weight that satisfies the strong doubling property (2.4). Let the pair \((\rho ,\omega )\) satisfy the compatibility condition
for all \(x \in \Omega \) and \(r \le R\). If \(v \in {{\mathop {W}\limits ^{\circ }}_{p}^{1}}(\omega ,\Omega )\), then \(v\in L^q(\rho ,\Omega )\) and
where the hidden constant depends on the quotient between the radii of the balls inscribed and circumscribed in \(\Omega \).
Proof
Given \(v \in {{\mathop {W}\limits ^{\circ }}_{p}^{1}}(\omega , \Omega )\) we denote by \(\tilde{v}\) its extension by zero to a ball \(B_R\) of radius \(R\) containing \(\Omega \) such that \(R \le 2 {{\mathrm{diam}}}(\Omega )\). We then apply [19, Theorem 1.5] if \(p<q\), or [57, Corollary 2.1] if \(p=q\), to conclude
By assumption \(\rho \) satisfies the strong doubling property (2.4) and so, for \(B_r \subset \Omega \subset \bar{\Omega } \subset B_R\), we have \(\rho (B_R) \lesssim \rho (B_r) \le \rho (\Omega )\) with a constant that only depends on \(R/r\). Applying this property, together with \(\omega (\Omega ) \le \omega (B_R)\), we derive (6.3). \(\square \)
Theorem 6.2
(Poincaré inequality) Let \(p \in (1,q]\), \(\rho \) be a weight that satisfies the strong doubling property (2.4), and \(\omega \in A_p({\mathbb {R}}^n)\), and let the pair \((\rho , \omega )\) satisfy (6.2). If \(v \in W^1_p(\omega , \Omega )\), then there is a constant \(v_\Omega \) such that
where the hidden constant depends on the quotient between the radii of the balls inscribed and circumscribed in \(\Omega \).
Proof
Since \(\Omega \) is open and bounded, we can choose \(0<r<R\) such that \(\bar{B}_r \subset \Omega \subset \bar{\Omega } \subset B_R\), where \(B_\delta \) is a ball of radius \(\delta \). The extension theorem on weighted Sobolev spaces proved in [22, Theorem 1.1] shows that there exists \( \tilde{v} \in W^1_p(\omega , B_R)\) such that \(\tilde{v}_{|\Omega } = v\) and
where the hidden constant does not depend on \(v\). If \(p<q\), then we invoke [38, Theorem 1] and [19, Theorem 1.3] to show that inequality (6.4) holds over \(B_R\) with \(v_\Omega \) being a weighted mean of \(\tilde{v}\) in \(B_R\). If \(p=q\) instead, we appeal to [57, Remark 2.3] and arrive at the same conclusion. Consequently, we have
The strong doubling property \(\rho (B_R)\lesssim \rho (\Omega )\) and \(\omega (\Omega )\le \omega (B_R)\) yield
Employing (6.5) we finally conclude (6.4). \(\square \)
Inequalities (6.3) and (6.4) are generalizations of several classical results. We first consider \(\omega = \rho \equiv 1\), for which an easy manipulation shows that (6.2) holds if \({{\mathrm{sob}}}(W^1_p) \ge {{\mathrm{sob}}}(L^q)\), whence (6.4) reduces to (6.1). We next consider \(\rho = \omega \in A_p({\mathbb {R}}^n)\), for which (6.2) becomes
This is a consequence of the strong doubling property (2.4) for \(\omega \) in conjunction with \(|B_R| \approx R^n\), provided the restriction \(q \le pn/(n-1)\) between \(q\) and \(p\) is valid. Moreover, owing to the so-called open ended property of the Muckenhoupt classes [58]: if \(\omega \in A_p({\mathbb {R}}^n)\), then \(\omega \in A_{p-\epsilon }({\mathbb {R}}^n)\) for some \(\epsilon > 0\), we conclude that \(q \le pn/(n-1) + \delta \) for some \(\delta >0\), thus recovering the embedding results proved by Fabes et al. [36, Theorem 1.3] and [36, Theorem 1.5]; see [19] for details.
The embedding result of Theorem 6.2 allows us to obtain polynomial interpolation error estimates in \(L^q(\rho ,T)\) for functions in \(W^1_p(\omega ,S_T)\).
Theorem 6.3
(interpolation estimates for different metrics I) Let \({\fancyscript{T}}\) be a simplicial mesh and \(\mathcal {P} = \mathbb {P}_1\) in (4.2). Let the pair \((\rho ,\omega ) \in A_{q}({\mathbb {R}}^n)\times A_p({\mathbb {R}}^n)\) satisfy (6.2). If \(v \in W^1_p(\omega ,S_{T})\) for any \(T \in {\fancyscript{T}}\), then
where the hidden constant depends only on \(\sigma \), \(\psi \), \(C_{p,\omega }\) and \(C_{\rho ,\omega }\).
Proof
Given an interior element \(T \in {\fancyscript{T}}\), let us denote \(v_T\) the constant such that the estimate (6.4) holds true on \(S_T\). Since \(v_T\) is constant over \({S_T}\), we have that \( \Pi _{{\fancyscript{T}}} v_T = v_T\) in \(T\). This, together with the stability bound (5.2) for the operator \(\Pi _{{\fancyscript{T}}}\), implies
The Poincaré inequality (6.4) and the mesh regularity assumption (5.6) yield
which is (6.6). A similar argument yields (6.6) on boundary elements. \(\square \)
A trivial but important consequence of Theorem 6.3 is the standard, unweighted, interpolation error estimate in Sobolev spaces; see [23, Theorem 3.1.5].
Corollary 6.4
(\(L^q\)-based interpolation estimate) If \(p<n\) and \({{\mathrm{sob}}}(W^1_p)>{{\mathrm{sob}}}(L^q)\), then for all \(T \in {\fancyscript{T}}\) and \(v \in W^1_p(S_{T})\), we have the local error estimate
where the hidden constant depends only on \(\sigma \) and \(\psi \).
For simplicial meshes, the invariance property of \(\Pi _{\fancyscript{T}}\) and similar arguments to those used in Sect. 5.1 enable us to obtain other interpolation estimates. We illustrate this in the following result.
Theorem 6.5
(interpolation estimates for different metrics II) Let \({\fancyscript{T}}\) be a simplicial mesh and \(\mathcal P = \mathbb {P}_1\) in (4.2). Given \(p\in (1,q]\), let the pair \((\omega ,\rho ) \in A_p({\mathbb {R}}^n) \times A_q({\mathbb {R}}^n)\) satisfy (6.2). Then, for every \(T \in {\fancyscript{T}}\) and every \(v \in W^2_p(\omega ,S_T)\) we have
where the hidden constant depends only on \(\sigma \), \(\psi \), \(C_{p,\omega }\) and \(C_{\rho ,\omega }\).
Proof
Let, again, \(T \in {\fancyscript{T}}\) be an interior element, the proof for boundary elements follows from similar arguments. Denote by \(\mathtt{v }\) a vertex of \(T\). Since the pair of weights \((\omega ,\rho )\) satisfies (6.2) the embedding \(W^2_p(\omega ,S_T) \hookrightarrow W^1_q(\rho ,S_T)\) holds and it is legitimate to write
In view of (5.3) and (5.2), we have
We now recall (4.6), namely \(\nabla Q^1_\mathtt{v }v = Q^0_\mathtt{v }\nabla v\), to end up with
because \(Q^0_\mathtt{v }c = c\) for any constant \(c\) and \(Q_{\mathtt{v }}^0\) is continuous in \(L^q(\rho ,T)\). Applying (6.4) finally implies (6.8). \(\square \)
7 Applications
We now present some immediate applications of the interpolation error estimates developed in the previous sections. We recall that \({\mathbb {V}}({\fancyscript{T}})\) denotes the finite element space over the mesh \({\fancyscript{T}}\), \(\Pi _{{\fancyscript{T}}}\) the quasi-interpolation operator defined in (5.1), and \(U_{{\fancyscript{T}}}\) the Galerkin solution to (1.3).
7.1 Nonuniformly elliptic boundary value problems
We first derive novel error estimates for the finite element approximation of solutions of a nonuniformly elliptic boundary value problem. Let \(\Omega \) be a polyhedral domain in \({\mathbb {R}}^n\) with Lipschitz boundary, \(\omega \in A_2({\mathbb {R}}^n)\) and \(f\) be a function in \(L^2({\omega ^{-1}},\Omega )\). Consider problem (1.1) with \({\mathcal {A}}\) as in (1.2). The natural space to seek a solution \(u\) of problem (1.1) is the weighted Sobolev space \(H_0^1(\omega ,\Omega )\).
Since \(\Omega \) is bounded and \(\omega \in A_2({\mathbb {R}}^n)\), Proposition 2.4 shows that \(H^1_0(\omega ,\Omega )\) is Hilbert. The Poincaré inequality proved in [36, Theorem 1.3] and the Lax–Milgram lemma then imply the existence and uniqueness of a solution to (1.1) as well as (1.3). The following result establishes a connection between \(u\) and \(U_{{\fancyscript{T}}}\).
Corollary 7.1
(error estimates for nonuniformly elliptic PDE) Let \(\omega \in A_2({\mathbb {R}}^n)\) and \({\mathbb {V}}({\fancyscript{T}})\) consist of simplicial elements of degree \(m\ge 1\) or rectangular elements of degree \(m=1\). If the solution \(u\) of (1.1) satisfies \(u \in H_0^1(\omega ,\Omega ) \cap H^{k+1}(\omega ,\Omega )\) for some \(1\le k \le m\), then we have the following global error estimate
where \(h\) denotes the local mesh-size function of \({\fancyscript{T}}\).
Proof
By Galerkin orthogonality we have
Consider \(V = \Pi _{{\fancyscript{T}}}u\) and use the local estimates of either Theorem 5.4 or Theorems 5.8 and 5.10, depending on the discretization. This concludes the proof. \(\square \)
Remark 7.2
(regularity assumption) We assumed that \(u \in H^{m+1}(\omega ,\Omega )\) in Corollary 7.1. Since the coefficient matrix \({\mathcal {A}}\) is not smooth but rather satisfies (1.2), it is natural to ponder whether \(u \in H^{m+1}(\omega ,\Omega )\) holds. References [18, 21] provide sufficient conditions on \({\mathcal {A}}\), \(\Omega \) and \(f\) for this result to be true for \(m=1\).
Remark 7.3
(multilevel methods) Multilevel methods are known to exhibit linear complexity for the solution of the ensuing algebraic systems. We refer to [43] for weights of class \(A_1\) and [20] for weights of class \(A_2\) (including fractional diffusion).
7.2 Elliptic problems with Dirac sources
Dirac sources arise in applications as diverse as modeling of pollutant transport, degradation in an aquatic medium [5] and problems in fractured domains [25]. The analysis of the finite element method applied to such problems is not standard, since in general the solution does not belong to \(H^1(\Omega )\) for \(n \ge 1\). A priori error estimates in the \(L^2(\Omega )\)-norm have been derived in the literature using different techniques. In a two dimensional setting and assuming that the domain is smooth, Babuška [7] derived almost optimal a priori error estimates of order \(\mathcal {O}(h_{}^{1-\epsilon })\), for an arbitrary \(\epsilon >0\). Scott [64] improved these estimates by removing the \(\epsilon \) and thus obtaining an optimal error estimate of order \(\mathcal {O}(h_{}^{2-n/2})\) for \(n=2,3\). It is important to notice, as pointed out in [66, Remark 3.1], that these results leave a “regularity gap”. In other words, the results of [64] require a \(\mathcal {C}^\infty \) domain yet the triangulation is assumed to consist of simplices. Using a different technique, Casas [17] obtained the same result for polygonal or polyhedral domains and general regular Borel measures on the right-hand side. Estimates in other norms are also available in the literature [34, 63].
In the context of weighted Sobolev spaces, interpolation estimates and a priori error estimates have been developed in [3, 25] for such problems. We now show how to apply our polynomial interpolation theory to obtain similar results.
Let \(\Omega \) be a convex polyhedral domain in \({\mathbb {R}}^n\) with Lipschitz boundary, and \(x_0\) be an interior point of \(\Omega \). Consider the following elliptic boundary value problem:
where \(\mathcal {A} \in L^\infty (\Omega )\) is a piecewise smooth and uniformly symmetric positive definite matrix, \(\mathbf b \in W^{1,\infty }(\Omega )^n\), \(c \in L^{\infty }(\Omega )\), and \(\delta _{x_0}\) denotes the Dirac delta supported at \(x_0 \in \Omega \). Existence and uniqueness of \(u\) in weighted Sobolev spaces follows from [3, Theorem 1.3] and Lemma 7.7 below, and its asymptotic behavior near \(x_0\) is dictated by that of the Laplacian
Denote by \(d = {{\mathrm{diam}}}(\Omega )\) the diameter of \(\Omega \) and by \(\mathsf{d _{x_0}}(x)\) the scaled Euclidean distance \(\mathsf{d _{x_0}}(x)=|x-x_0|/(2d)\) to \(x_0\). Define the weight
We now study two important properties of \(\varpi \): \({\nabla }u\in L^2(\varpi ,\Omega )\) and \(\varpi \in A_2({\mathbb {R}}^n)\).
Lemma 7.4
(regularity of \(\nabla u\)) The solution \(u\) of (7.2) satisfies \({\nabla }u \in L^2(\varpi ,\Omega )\).
Proof
Since \(\Omega \subset B\), the ball of radius \(d\) centered at \(x_0\), we readily have from (7.3)
which is the asserted result. \(\square \)
Lemma 7.5
(\(\varpi \in A_2({\mathbb {R}}^n)\)) The weight \(\varpi \) belongs to the Muckenhoupt class \(A_2({\mathbb {R}}^n)\) with constant \(C_{2,\varpi }\) only depending on \(d\).
Proof
Let \(x_0=0\) for simplicity, let \(B_r=B_r(y)\) be a ball in \({\mathbb {R}}^n\) of radius \(r\) and center \(y\), and denote \(\varpi (B_r) = \int _{B_r} \varpi \) and \(\varpi ^{-1}(B_r) = \int _{B_r} \varpi ^{-1}\). We must show
with a hidden constant depending solely on \(d\). We split the proof into two cases.
-
1.
Case \(|y|<2r\): Since \(B_r(y) \subset B_{3r}(0)\) we infer that
$$\begin{aligned} \varpi (B_r) \lesssim \int _{B_{3r}(0)} \frac{\big (\frac{|x|}{2d}\big )^{n-2}}{\log ^2 \frac{|x|}{2d}}{\, {\mathrm{d}}}x \!\lesssim \! \int _0^{\frac{3r}{2d}} \frac{s^{2n-3}}{\log ^2 s} {\, {\mathrm{d}}}s\!\approx \! \frac{\big (\frac{3r}{2d}\big )^{2n-2}}{\log ^2\frac{3r}{2d}} \end{aligned}$$and
$$\begin{aligned} \varpi ^{-1}(B_r) \!\lesssim \! \int _{B_{3r}(0)} \Big (\frac{|x|}{2d}\Big )^{2-n}\log ^2 \Big (\frac{|x|}{2d} \Big ) {\, {\mathrm{d}}}x\lesssim \int _0^{\frac{3r}{2d}} s \log ^2 s {\, {\mathrm{d}}}s \!\approx \!\Big (\frac{3r}{2d}\Big )^2 \log ^2 \frac{3r}{2d}, \end{aligned}$$provided \(3r<d\). The equivalences \(\approx \) can be checked via L’Hôpital’s rule for \(r\rightarrow 0\). If \(3r\ge d\), then both \(\varpi (B_r)\) and \(\varpi ^{-1}(B_r)\) are bounded by constants depending only on \(d\). Therefore, this yields (7.5).
-
2.
Case \(|y| \ge 2r\): Since all \(x\in B_r(y)\) satisfy \(\frac{1}{2} |y| \le |x| \le \frac{3}{2} |y|\) we deduce
$$\begin{aligned} \varpi \!\le \! \min \left\{ \frac{\big (\frac{3|y|}{4d}\big )^{n-2}}{\log ^2\frac{3|y|}{4d}}, \frac{2^{2-n}}{\log ^2 2} \right\} ,\quad \!\varpi ^{-1} \le \max \left\{ \Big (\frac{|y|}{4d}\Big )^{2-n}\log ^2 \frac{|y|}{4d}, 2^{n-2} \log ^2 2 \right\} , \end{aligned}$$whence \(\varpi (B_r) \, \varpi ^{-1}(B_r)\) satisfies again (7.5).
This completes the proof. \(\square \)
The fact that the weight \(\varpi \in A_2({\mathbb {R}}^n)\) is the key property for the analysis of discretizations of problem (7.2). Let us apply the results of Theorem 6.1 to this particular weight.
Lemma 7.6
(\(H^1(\Omega ) \hookrightarrow L^2(\varpi ^{-1},\Omega )\)) Let \(\varpi \) be defined in (7.4). If \(n < 4\), then the following embedding holds:
Proof
This is an application of Theorem 6.1. We must show when condition (6.2) holds with \(p=q=2\), \(\omega =1\) and \(\rho =\varpi ^{-1}\). In other words, we need to verify
where both \(B_r\) and \(B_R\) are centered at \(y\in {\mathbb {R}}^n\). We proceed as in Lemma 7.5 and consider now three cases.
-
1.
\(|y|<2r\). We know from Lemma 7.5 that \(\varpi ^{-1}(B_r) \lesssim \big (\frac{3r}{2d}\big )^2 \log ^2 \big (\frac{3r}{2d}\big )\). Moreover, every \(x\in B_R(y)\) satisfies \(|x| < |y|+R \le 3R\) whence
$$\begin{aligned} \varpi ^{-1}(B_R)&\ge \int _{B_R} \Big (\frac{3|x|}{2d}\Big )^{2-n}\log ^2 \Big (\frac{3|x|}{2d}\Big ) {\, {\mathrm{d}}}x \approx \int _0^{\frac{3R}{2d}} s \log ^2s {\, {\mathrm{d}}}s\\&\approx \Big (\frac{3R}{2d}\Big )^2\log ^2 \Big (\frac{3R}{2d}\Big ). \end{aligned}$$If \(n<4\), then this shows
$$\begin{aligned} \Lambda (r,R)\lesssim \frac{r^{4-n}}{R^{4-n}} \frac{\log ^2\big (\frac{3r}{2d}\big )}{\log ^2\big (\frac{3R}{2d}\big )} \lesssim 1. \end{aligned}$$ -
2.
\(2r\le |y| <2R\). We learn from Lemma 7.5 that
$$\begin{aligned} \varpi ^{-1}(B_r) \lesssim |B_r|\Big (\frac{|y|}{4d}\Big )^{2-n}\log ^2\Big (\frac{|y|}{4d}\Big )\lesssim \Big (\frac{r}{2d} \Big )^2\log ^2 \Big (\frac{r}{2d}\Big ). \end{aligned}$$In addition, any \(x\in B_R\) satisfies \(|x|\le |y|+R\le 3R\) and the same bound as in Case 1 holds for \(\varpi ^{-1}(B_R)\). Consequently, \(\Lambda (r,R)\lesssim 1\) again for \(n<4\).
-
3.
\(|y|\ge 2R\). Since still \(|y|>2r\) we have for \(\varpi ^{-1}(B_r)\) the same upper bound as in Case 2. On the other hand, for all \(x\in B_R\) we realize that \(|x| \le |y| + R \le \frac{3}{2} |y|\) and \(\varpi ^{-1}(x)\ge \varpi ^{-1}(\frac{3}{2} y)\). Therefore, we deduce
$$\begin{aligned} \Big (\frac{3R}{d}\Big )^2 \log ^2 \frac{3R}{d}\lesssim R^n \Big (\frac{3|y|}{2d}\Big )^{2-n} \log ^2 \Big (\frac{3|y|}{2d}\Big )\lesssim \varpi ^{-1}(B_R), \end{aligned}$$which again leads to \(\Lambda (r,R) \lesssim 1\) for \(n<4\).
This concludes the proof. \(\square \)
The embedding of Lemma 7.6 allows us to develop a general theory for equations of the form (7.2) on weighted spaces. To achieve this, define
The following results follow [3, 25].
Lemma 7.7
(inf–sup conditions) The bilinear form \(a\), defined in (7.6), satisfies
Proof
We divide the proof into several steps:
-
1.
We first obtain an orthogonal decomposition of \(L^2(\varpi ^{-1},\Omega )\) [25, Lemma 2.1]: for every \(\mathbf {q} \in L^2(\varpi ^{-1},\Omega )\) there is a unique couple \((\varvec{\sigma },v)\in {\mathbb {X}}:=L^2(\varpi ^{-1},\Omega ) \times H^1_0(\varpi ^{-1},\Omega )\) such that
$$\begin{aligned} \mathbf {q} = \varvec{\sigma } + \nabla v, \qquad \int _\Omega \mathcal {A}\varvec{\sigma } \cdot \nabla w = 0, \qquad \forall w \in H^1_0(\varpi ,\Omega ), \end{aligned}$$(7.9)$$\begin{aligned} \Vert \varvec{\sigma }\Vert _{L^2(\varpi ^{-1},\Omega )} + \Vert {\nabla }v\Vert _{L^2(\varpi ^{-1},\Omega )}\lesssim \Vert \mathbf {q}\Vert _{L^2(\varpi ^{-1},\Omega )}. \end{aligned}$$(7.10)To see this, we let \({\mathbb {Y}}:=L^2(\varpi ^{-1},\Omega ) \times H^1_0(\varpi ,\Omega )\), write (7.9) in mixed form
$$\begin{aligned} \mathcal {B}[(\varvec{\sigma },v), (\varvec{\tau },w)]&:=\int _\Omega \varvec{\sigma }\cdot \varvec{\tau }+ \int _\Omega \nabla v\cdot \varvec{\tau }+ \int _\Omega \mathcal {A} \varvec{\sigma }\cdot \nabla w\\&= \int _\Omega \mathbf {q}\cdot \varvec{\tau }\quad \forall \, (\varvec{\tau },w)\in {\mathbb {Y}}, \end{aligned}$$and apply the generalized Babuška-Brezzi inf–sup theory [11, Theorem 2.1], [25, Lemma 2.1]. This requires only that \(\mathcal {A}\) be positive definite along with the trivial fact that \(\phi \in L^2(\varpi ^{-1},\Omega )\) implies \(\varpi ^{-1} \phi \in L^2(\varpi ,\Omega )\).
-
2.
Set \(|\mathbf {b}|=c=0\) and let \(w \in H^1_0(\varpi ,\Omega )\) be given. According to Step 1 we can decompose \(\mathbf {q} = \varpi \nabla w \in L^2(\varpi ^{-1},\Omega ) \) into \(\mathbf {q} = \varvec{\sigma } + \nabla v\). Invoking (7.9), as in [25, Corollary 2.2] and [3, Proposition 1.1], we infer that
$$\begin{aligned} \int _{\Omega } \mathcal {A} \nabla w \cdot \nabla v \!=\!\int _{\Omega } \mathcal {A} \nabla w \cdot \mathbf {q}- \int _{\Omega } \mathcal {A} \nabla w \cdot \mathbf {\sigma }\!=\! \int _\Omega \varpi \mathcal {A} \nabla w \cdot \nabla w\!\approx \! \int _{\Omega } \varpi | \nabla w |^2, \end{aligned}$$whence, using (7.10) in the form \(\Vert \nabla v\Vert _{L^2(\varpi ^{-1},\Omega )} \lesssim \Vert \nabla w \Vert _{L^2(\varpi ,\Omega )}\), we deduce the inf–sup condition (7.7).
-
3.
As in [3], we show that for every \(F \in H^1_0(\varpi ^{-1},\Omega )'\) the problem
$$\begin{aligned} w \in H^1_0(\varpi ,\Omega ): \quad a(w,v) = \langle F, v \rangle , \quad \forall v \in H^1_0(\varpi ^{-1},\Omega ), \end{aligned}$$is well posed. To this end, we decompose \(w=w_1 + w_2\in H^1_0(\varpi ,\Omega )\), with
$$\begin{aligned} w_1 \in H^1_0(\varpi ,\Omega ): \quad \int _\Omega \mathcal {A} \nabla w_1 \cdot \nabla v = \langle F, v \rangle , \quad \forall v \in H^1_0(\varpi ^{-1},\Omega ), \end{aligned}$$(7.11)$$\begin{aligned} w_2 \in H^1_0(\Omega ): \quad a(w_2,v) = - \int _\Omega \left( \mathbf {b}\cdot {\nabla }w_1 + c w_1 \right) v, \quad \forall v \in H^1_0(\Omega ). \end{aligned}$$(7.12)In fact, if problems (7.11) and (7.12) have a unique solution, then we obtain
$$\begin{aligned} a(w,v)&= a(w_1+w_2,v) \\&= \int _\Omega \mathcal {A} {\nabla }w_1 \cdot {\nabla }v + \int _\Omega \left( \mathbf {b}\cdot {\nabla }w_1 + c w_1 \right) v + a(w_2,v)= \langle F, v \rangle , \end{aligned}$$for any \(v \in H^1_0(\varpi ^{-1},\Omega ) \subset H_0^1(\Omega )\). The conclusion of Step 2 shows that (7.11) is well posed. The Cauchy–Schwarz inequality and Lemma 7.6 yield
$$\begin{aligned}&\int _\Omega \left( \mathbf {b}\cdot {\nabla }w_1 + c w_1 \right) v \lesssim \Vert w_1 \Vert _{H^1(\varpi ,\Omega )} \Vert v \Vert _{L^2(\varpi ^{-1},\Omega )}\\&\quad \lesssim \Vert F\Vert _{H^1_0(\varpi ^{-1},\Omega )'}\Vert \nabla v\Vert _{L^2(\varpi ^{-1},\Omega )}, \end{aligned}$$which combines with the fact that \(a(\cdot ,\cdot )\) satisfies the inf–sup condition in \(H^1_0(\Omega )\) [8, Theorem 5.3.2 - Part I] to show that (7.12) is well posed as well.
Finally, the general inf–sup theory [35] [61, Theorem 2] guarantees the validity of the two inf–sup conditions (7.7) and (7.8). This concludes the proof. \(\square \)
We also have the following discrete counterpart of Lemma 7.7. We refer to [25, Lemma 3.3] and [3, Theorem 2.1] for similar results which, however, do not exploit the Muckenhoupt structure of the weight \(\varpi \).
Lemma 7.8
(discrete inf–sup conditions) Let \({\fancyscript{T}}\) be a quasi-uniform mesh of size \(h\) consisting of simplices. If \({\mathbb {V}}({\fancyscript{T}})\) is made of piecewise linears, then the bilinear form \(a\), defined in (7.6), satisfies:
where the hidden constants depend on \(C_{2,\varpi }\) but not on \(h\).
Proof
We proceed as in Lemma 7.7. We define the spaces of piecewise constants
those of piecewise linears \({\mathbb {V}}_{1}({\fancyscript{T}})={\mathbb {W}}_{1}({\fancyscript{T}})={\mathbb {V}}({\fancyscript{T}})\), and endow the product spaces \({\mathbb {V}}_{0}({\fancyscript{T}})\times {\mathbb {V}}_{1}({\fancyscript{T}})\) and \({\mathbb {W}}_{0}({\fancyscript{T}})\times {\mathbb {W}}_{1}({\fancyscript{T}})\) with the norms of \({\mathbb {X}}\) and \({\mathbb {Y}}\) respectively, the latter spaces being defined in Lemma 7.7. Given \(\mathbf {Q}\in {\mathbb {V}}_{0}({\fancyscript{T}})\), we need the following orthogonal decomposition—a discrete counterpart of (7.9)–(7.10): find \(\Sigma \in {\mathbb {V}}_0({\fancyscript{T}}), V\in {\mathbb {V}}_1({\fancyscript{T}})\) so that
We first have to verify that the bilinear form \(\mathcal {B}\) satisfies a discrete inf–sup condition, as in Step 1 of Lemma 7.7. We just prove the most problematic inf–sup
We let \(\mathbf {T}=\varpi _{\fancyscript{T}}\nabla W \in {\mathbb {V}}_{0}({\fancyscript{T}})\), where \(\varpi _{\fancyscript{T}}\) is the piecewise constant weight defined on each element \(T\in {\fancyscript{T}}\) as \(\varpi _{\fancyscript{T}}|_T = |T|^{-1}\int _T \varpi \). Since \(\nabla W \in {\mathbb {V}}_{0}({\fancyscript{T}})\), we get
and
We employ a similar calculation to perform Step 2 of Lemma 7.7, and the rest is exactly the same as in Lemma 7.7. The proof is thus complete. \(\square \)
The numerical analysis of a finite element approximation to the solution of problem (7.2) is now a consequence of the interpolation estimates developed in Sect. 6.
Corollary 7.9
(error estimate for elliptic problems with Dirac sources) Assume that \(n<4\) and let \(u \in H_0^1(\varpi ,\Omega )\) be the solution of (7.2) and \(U_{{\fancyscript{T}}} \in {\mathbb {V}}({\fancyscript{T}})\) be the finite element solution to (7.2). If \({\fancyscript{T}}\) is simplicial, quasi-uniform and of size \(h\), we have the following error estimate
Proof
We employ a duality argument. Let \(\varphi \in H_0^1(\Omega )\) be the solution of
which is the adjoint of (7.2). Since \(\Omega \) is convex and polyhedral, and the coefficients \(\mathcal {A},\mathbf b ,c\) are sufficiently smooth, we have the standard regularity pick-up [40]:
This, together with Lemma 7.6, allows us to conclude that, if \(n<4\),
Moreover, Theorem 6.5 yields the error estimate
with
Let \(\Phi _{{\fancyscript{T}}}\in {\mathbb {V}}({\fancyscript{T}})\) be the Galerkin solution to (7.16). Galerkin orthogonality and the continuity of the form \(a\) on \(H^1_0(\varpi ,\Omega )\times H^1_0(\varpi ^{-1},\Omega )\) yield
The discrete inf–sup conditions of Lemma 7.8 and the continuity of the form \(a\) allow us to conclude that
Combining this bound with (7.17) and (7.18) results in
which is the asserted estimate (7.15) in disguise. \(\square \)
Remark 7.10
(an interpolation result) For any \(\beta \in (-n,n)\) we can consider the weight \(\mathsf{d _{x_0}}(x)^\beta \), which belongs to the \(A_2({\mathbb {R}}^n)\) Muckenhoupt class. Theorem 5.4 and Theorems 5.8 and 5.10 show that
This extends the interpolation error estimates of [3, Proposition 4.6], which are valid for \(\beta \in (-n,0)\) only.
7.3 Fractional powers of uniformly elliptic operators
We finally examine finite element approximations of solutions to fractional differential equations; we refer the reader to [60] for further details. Let \(\Omega \) be a polyhedral domain in \({\mathbb {R}}^n\) (\(n\ge 1\)), with boundary \(\partial \Omega \). Given a piecewise smooth and uniformly symmetric positive definite matrix \(\mathcal {A} \in L^\infty (\Omega )\) and a nonnegative function \(c \in L^\infty (\Omega )\), define the differential operator
Given \(f \in H^{-1}(\Omega )\), the problem of finding \(u \in H_0^1(\Omega )\) such that \({\mathcal {L}}u = f\) has a unique solution. Moreover, the operator \({\mathcal {L}}: \mathcal {D}({\mathcal {L}}) \subset L^2(\Omega ) \rightarrow L^2(\Omega )\) with domain \(\mathcal {D}({\mathcal {L}}) = H^2(\Omega ) \cap H^1_0(\Omega )\) has a compact inverse [44, Theorem 2.4.2.6]. Therefore, there exists a sequence of eigenpairs \(\{\lambda _k,\varphi _k\}_{k=1}^\infty \), with \(\lambda _k > 0\), such that
The sequence \(\{\varphi _k\}_{k=1}^\infty \) is an orthonormal basis of \(L^2(\Omega )\).
In this case, for \(s\in (0,1)\), we define the fractional powers of \({\mathcal {L}}_0\) (where the sub-index is used to indicate the homogeneous Dirichlet boundary conditions) by
It is possible also to show that \({\mathcal {L}}_0^s : {\mathbb {H}}^{s}(\Omega )\rightarrow {\mathbb {H}}^{-s}(\Omega )\) is an isomorphism, where
and \({\mathbb {H}}^{-s}(\Omega )\) denotes its dual space. We are interested in finding numerical solutions to the following fractional differential equation: given \(s\in (0,1)\) and a function \(f \in {\mathbb {H}}^{-s}(\Omega )\), find \(u\) such that
The fractional operator \({\mathcal {L}}_0^s\) is nonlocal (see [14, 15, 55]). To localize it, Caffarelli and Silvestre showed in [15] that any power of the fractional Laplacian in \({\mathbb {R}}^n\) can be determined as a Dirichlet-to-Neumann operator via an extension problem on the upper half-space \({\mathbb {R}}^{n+1}_+\). For a bounded domain \(\Omega \) and more general operators, this result has been extended and adapted in [16, 69], respectively. This way the nonlocal problem (7.20) is replaced by the local one
with \(\alpha := 1-2s, \mathbf {A} = {{\mathrm{diag}}}\{\mathcal A, 1\} \in {\mathbb {R}}^{(n+1) \times (n+1)}\), posed in the semi-infinite cylinder
and subject to a Neumann condition at \(y=0\) involving \(f\). Since \({\mathcal {C}}\) is an unbounded domain, this problem cannot be directly approximated with finite-element-like techniques. However, as [60, Proposition 3.1] shows, the solution to this problem decays exponentially in the extended variable \(y\) so that, by truncating the cylinder \({\mathcal {C}}\) to

and setting a vanishing Dirichlet condition on the upper boundary  , we only incur in an exponentially small error in terms of
, we only incur in an exponentially small error in terms of  [60, Theorem 3.5].
[60, Theorem 3.5].
Define

where  is the lateral boundary. As [60, Proposition 2.5] shows, the trace operator
is the lateral boundary. As [60, Proposition 2.5] shows, the trace operator  is well defined. The aforementioned problem then reads: find
is well defined. The aforementioned problem then reads: find  such that for all
such that for all 

where \(\langle \cdot , \cdot \rangle _{{\mathbb {H}}^{s}(\Omega )\times {\mathbb {H}}^{-s}(\Omega )}\) denotes the duality pairing between \({\mathbb {H}}^{s}(\Omega )\) and \({\mathbb {H}}^{-s}(\Omega )\) and \(d_s\) is a positive normalization constant which depends only on \(s\).
The second order regularity of the solution \({\fancyscript{U}}\) of (7.21), with  being replaced by \({\mathcal {C}}\), is much worse in the pure \(y\) direction as the following estimates from [60, Theorem 2.6] reveal
being replaced by \({\mathcal {C}}\), is much worse in the pure \(y\) direction as the following estimates from [60, Theorem 2.6] reveal
where \(\beta > 2\alpha + 1\). This suggests that graded meshes in the extended variable \(y\) play a fundamental role.
We construct a mesh over  with cells of the form \(T=K\times I\) with \(K \subset \Omega \) being an element that is isoparametrically equivalent either to \([0,1]^n\) or the unit simplex in \({\mathbb {R}}^n\) and \(I \subset {\mathbb {R}}\) is an interval. Exploiting the Cartesian structure of the mesh it is possible to handle anisotropy in the extended variable and, much as in Sect. 5.2, obtain estimates of the form
with cells of the form \(T=K\times I\) with \(K \subset \Omega \) being an element that is isoparametrically equivalent either to \([0,1]^n\) or the unit simplex in \({\mathbb {R}}^n\) and \(I \subset {\mathbb {R}}\) is an interval. Exploiting the Cartesian structure of the mesh it is possible to handle anisotropy in the extended variable and, much as in Sect. 5.2, obtain estimates of the form
with \(j=1,\ldots ,n+1\) and where \(h_{\mathtt{v }'}= \min \{h_K: \mathtt{v }' \text { is a vertex of } K\}\), and \(h_{\mathtt{v }''} = \min \{h_I: \mathtt{v }'' \text { is a vertex of } I\}\); see [60, Theorems 4.6–4.9] for details. However, since \({\fancyscript{U}}_{yy} \approx y^{-\alpha -1 }\) as \(y \approx 0\), we realize that  and the second estimate is not meaningful for \(j=n+1\). In view of the regularity estimate (7.23) it is necessary to measure the regularity of \({\fancyscript{U}}_{yy}\) with a stronger weight and thus compensate with a graded mesh in the extended dimension. This makes anisotropic estimates essential.
and the second estimate is not meaningful for \(j=n+1\). In view of the regularity estimate (7.23) it is necessary to measure the regularity of \({\fancyscript{U}}_{yy}\) with a stronger weight and thus compensate with a graded mesh in the extended dimension. This makes anisotropic estimates essential.
We consider the graded partition of the interval  with mesh points
with mesh points

where \(\gamma > 3/(1-\alpha )\), along with a quasi-uniform triangulation \({\fancyscript{T}}_{\Omega }\) of the domain \(\Omega \). We construct the mesh  as the tensor product of \({\fancyscript{T}}_\Omega \) and the partition given in (7.24); hence \(\#{\fancyscript{T}}= M \, \# {\fancyscript{T}}_\Omega \). Assuming that \(\# {\fancyscript{T}}_\Omega \approx M^n\) we have
as the tensor product of \({\fancyscript{T}}_\Omega \) and the partition given in (7.24); hence \(\#{\fancyscript{T}}= M \, \# {\fancyscript{T}}_\Omega \). Assuming that \(\# {\fancyscript{T}}_\Omega \approx M^n\) we have  . Finally, since \({\fancyscript{T}}_\Omega \) is shape regular and quasi-uniform, \(h_{{\fancyscript{T}}_{\Omega }} \approx (\# {\fancyscript{T}}_{\Omega })^{-1/n}\). All these considerations allow us to obtain the following result.
. Finally, since \({\fancyscript{T}}_\Omega \) is shape regular and quasi-uniform, \(h_{{\fancyscript{T}}_{\Omega }} \approx (\# {\fancyscript{T}}_{\Omega })^{-1/n}\). All these considerations allow us to obtain the following result.
Corollary 7.11
(error estimate for fractional powers of elliptic operators) Let \({\fancyscript{T}}\) be a graded tensor product grid, which is quasi-uniform in \(\Omega \) and graded in the extended variable so that (7.24) hold. If \({\mathbb {V}}({\fancyscript{T}})\) is made of bilinear elements, then the solution of (7.21) and its Galerkin approximation \(U_{{\fancyscript{T}}} \in {\mathbb {V}}({\fancyscript{T}})\) satisfy

where  . Alternatively, if \(u\) denotes the solution of (7.20), then
. Alternatively, if \(u\) denotes the solution of (7.20), then

Proof
First of all, notice that \(y^{\alpha } \in A_2({\mathbb {R}}^{n+1})\) for \(\alpha \in (-1,1)\). Owing to the exponential decay of \({\fancyscript{U}}\), and the choice of the parameter  , it suffices to estimate
, it suffices to estimate  on the mesh
on the mesh  ; see [60, Sect. 4.1]. To do so, we notice that if \(I_1\) and \(I_2\) are neighboring cells on the partition of
; see [60, Sect. 4.1]. To do so, we notice that if \(I_1\) and \(I_2\) are neighboring cells on the partition of  , then the weak regularity condition (5.6) holds. Thus, we decompose the mesh
, then the weak regularity condition (5.6) holds. Thus, we decompose the mesh  into the sets
into the sets

and apply our interpolation theory developed in Theorems 5.8 and 5.10 for interior and boundary elements respectively, together with the local regularity estimates for the function \({\fancyscript{U}}\) derived in [60, Theorem 2.9]. \(\square \)
The error estimates with graded meshes are quasi-optimal in both regularity and order. Error estimates for quasi-uniform meshes are suboptimal in terms of order [60, Section 5]. Mesh anisotropy is thus able to capture the singular behavior of the solution \({\fancyscript{U}}\) and restore optimal decay rates.
References
Acosta, G.: Lagrange and average interpolation over 3D anisotropic elements. J. Comput. Appl. Math. 135(1), 91–109 (2001)
Agler, J., McCarthy, J.E.: Pick interpolation and Hilbert function spaces. In: Graduate Studies in Mathematics, vol. 44. American Mathematical Society, Providence (2002)
Agnelli, J.P., Garau, E.M., Morin, P.: A posteriori error estimates for elliptic problems with Dirac measure terms in weighted spaces. ESAIM: Math. Modell. Numer. Anal. 48(11), 1557–1581 (2014)
Apel, T.: Interpolation of non-smooth functions on anisotropic finite element meshes. M2AN. Math. Model. Numer. Anal. 33(6), 1149–1185 (1999)
Araya, R., Behrens, E., Rodríguez, R.: An adaptive stabilized finite element scheme for a water quality model. Comput. Methods Appl. Mech. Eng. 196(29–30), 2800–2812 (2007)
Arroyo, D., Bespalov, A., Heuer, N.: On the finite element method for elliptic problems with degenerate and singular coefficients. Math. Comp. 76(258), 509–537 (2007)
Babuška, I.: Error-bounds for finite element method. Numer. Math. 16, 322–333 (1970/1971)
Babuška, I., Aziz, A.K.: Survey lectures on the mathematical foundations of the finite element method. In: The Mathematical Foundations of the Finite Element Method with Applications to Partial Differential Equations (Proc. Sympos., Univ. Maryland, Baltimore, Md., 1972), pp. 1–359. Academic Press, New York. With the collaboration of G. Fix and R. B. Kellogg (1972)
Bartels, S., Nochetto, R.H., Salgado, A.J.: A total variation diminishing interpolation operator and applications. Math. Comput. (2014, accepted)
Belhachmi, Z., Bernardi, Ch., Deparis, S.: Weighted Clément operator and application to the finite element discretization of the axisymmetric Stokes problem. Numer. Math. 105(2), 217–247 (2006)
Bernardi, Ch., Canuto, C., Maday, Y.: Generalized inf-sup conditions for Chebyshev spectral approximation of the Stokes problem. SIAM J. Numer. Anal. 25(6), 1237–1271 (1988)
Besov, O.V., Il’in, V.P., Nikol’skiĭ, S.M.: Integralnye predstavleniya funktsii i teoremy vlozheniya. 2nd ed. Fizmatlit “Nauka”, Moscow (1996)
Brenner, S.C., Scott, L.R.: The mathematical theory of finite element methods. In: Texts in Applied Mathematics, vol. 15. 3rd ed. Springer, New York (2008)
Cabré, X., Sire, Y.: Nonlinear equations for fractional Laplacians ii: existence, uniqueness and qualitative properties of solutions. Trans. Amer. Math. Soc. (2014, To appear)
Caffarelli, L., Silvestre, L.: An extension problem related to the fractional Laplacian. Commun. Partial Differ. Equ. 32(7–9), 1245–1260 (2007)
Capella, A., Dávila, J., Dupaigne, L., Sire, Y.: Regularity of radial extremal solutions for some non-local semilinear equations. Commun. Partial Differ. Equ. 36(8), 1353–1384 (2011)
Casas, E.: \(L^2\) estimates for the finite element method for the Dirichlet problem with singular data. Numer. Math. 47(4), 627–632 (1985)
Cavalheiro, A.C.: A theorem on global regularity for solutions of degenerate elliptic equations. Commun. Math. Anal. 11(2), 112–123 (2011)
Chanillo, S., Wheeden, R.L.: Weighted Poincaré and Sobolev inequalities and estimates for weighted Peano maximal functions. Am. J. Math. 107(5), 1191–1226 (1985)
Chen, L., Nochetto, R.H., Otárola, E., Salgado, A.J.: Multilevel methods for nonuniformly elliptic operators. arXiv:1403.4278. (2014)
Chen, Y.: Regularity of solutions to the Dirichlet problem for degenerate elliptic equation. Chin. Ann. Math. Ser. B 24(4), 529–540 (2003)
Chua, S.-K.: Extension theorems on weighted Sobolev spaces. Indiana Univ. Math. J. 41(4), 1027–1076 (1992)
Ciarlet, P.G.: The finite element method for elliptic problems. In: Classics in Applied Mathematics, vol. 40. SIAM, Philadelphia (2002)
Clément, P.: Approximation by finite element functions using local regularization. RAIRO Analyse Numérique 9(R-2), 77–84 (1975)
D’Angelo, C.: Finite element approximation of elliptic problems with Dirac measure terms in weighted spaces: applications to one- and three-dimensional coupled problems. SIAM J. Numer. Anal. 50(1), 194–215 (2012)
Diening, L., Ružička, M.: Interpolation operators in Orlicz–Sobolev spaces. Numer. Math. 107(1), 107–129 (2007)
Duoandikoetxea, J.: Fourier analysis. In: Graduate Studies in Mathematics, vol. 29. American Mathematical Society, Providence (2001). Translated and revised from the 1995 Spanish original by David Cruz-Uribe
Dupont, T., Scott, L.R.: Polynomial approximation of functions in Sobolev spaces. Math. Comp. 34(150), 441–463 (1980)
Durán, R.G.: On polynomial approximation in Sobolev spaces. SIAM J. Numer. Anal. 20(5), 985–988 (1983)
Durán, R.G.: Quasi-optimal estimates for finite element approximations using Orlicz norms. Math. Comp. 49(179), 17–23 (1987)
Durán, R.G., Lombardi, A.L.: Error estimates on anisotropic \(Q_1\) elements for functions in weighted Sobolev spaces. Math. Comput. 74(252), 1679–1706 (2005, electronic)
Durán, R.G., Lombardi, A.L., Prieto, M.I.: Superconvergence for finite element approximation of a convection–diffusion equation using graded meshes. IMA J. Numer. Anal. 32(2), 511–533 (2012)
Durán, R.G., López, F.: García. Solutions of the divergence and Korn inequalities on domains with an external cusp. Ann. Acad. Sci. Fenn. Math. 35(2), 421–438 (2010)
Eriksson, K.: Improved accuracy by adapted mesh-refinements in the finite element method. Math. Comput. 44(170), 321–343 (1985)
Ern, A., Guermond, J.-L.: Theory and practice of finite elements. In: Applied Mathematical Sciences, vol. 159. Springer, New York (2004)
Fabes, E.B., Kenig, C.E., Serapioni, R.P.: The local regularity of solutions of degenerate elliptic equations. Commun. Partial Differ. Equ. 7(1), 77–116 (1982)
Figueroa, L.E., Süli, E.: Greedy approximation of high-dimensional Ornstein–Uhlenbeck operators. Found. Comput. Math. 12(5), 573–623 (2012)
Franchi, B., Gutiérrez, C.E., Wheeden, R.L.: Two-weight Sobolev–Poincaré inequalities and Harnack inequality for a class of degenerate elliptic operators. Atti Accad. Naz. Lincei Cl. Sci. Fis. Mat. Natur. Rend. Lincei (9) Mat. Appl. 5(2), 167–175 (1994)
French, D.A.: The finite element method for a degenerate elliptic equation. SIAM J. Numer. Anal. 24(4), 788–815 (1987)
Gilbarg, D., Trudinger, N.S.: Elliptic partial differential equations of second order. In: Classics in Mathematics. Springer, Berlin (2001). Reprint of the 1998 edition
Gol’dshtein, V., Ukhlov, A.: Weighted Sobolev spaces and embedding theorems. Trans. Am. Math. Soc. 361(7), 3829–3850 (2009)
Gopalakrishnan, J., Pasciak, J.E.: The convergence of V-cycle multigrid algorithms for axisymmetric Laplace and Maxwell equations. Math. Comput. 75(256), 1697–1719 (2006)
Griebel, M., Scherer, K., Schweitzer, A.: Robust norm equivalencies for diffusion problems. Math. Comput. 76(259), 1141–1161 (2007, electronic)
Grisvard, P.: Elliptic problems in nonsmooth domains. In: Monographs and Studies in Mathematics, vol. 24. Pitman (Advanced Publishing Program), Boston (1985)
Gurka, P., Opic, B.: Continuous and compact imbeddings of weighted Sobolev spaces. I. Czechoslovak Math. J. 38(113)(4), 730–744 (1988)
Hajłasz, P.: Sobolev spaces on an arbitrary metric space. Potential Anal. 5(4), 403–415 (1996)
Hajłasz, P., Koskela, P.: Sobolev met Poincaré. Mem. Am. Math. Soc. 145(688), x+101 (2000)
Haroske, D.D., Skrzypczak, L.: Entropy and approximation numbers of embeddings of function spaces with Muckenhoupt weights. I. Rev. Mat. Complut. 21(1), 135–177 (2008)
Haroske, D.D., Skrzypczak, L.: Entropy and approximation numbers of embeddings of function spaces with Muckenhoupt weights, II. General weights. Ann. Acad. Sci. Fenn. Math. 36(1), 111–138 (2011)
Heinonen, J., Kilpeläinen, T., Martio, O.: Nonlinear potential theory of degenerate elliptic equations. In: Oxford Mathematical Monographs. The Clarendon Press, Oxford University Press, Oxford Science Publications, New York (1993)
Kufner, A.: Weighted Sobolev Spaces. A Wiley-Interscience Publication, Wiley, New York (1985)
Kufner, A., Opic, B.: How to define reasonably weighted Sobolev spaces. Comment. Math. Univ. Carolin. 25(3), 537–554 (1984)
Kufner, A., Sändig, A.-M.: Some applications of weighted Sobolev spaces. In: Teubner Texts in Mathematics, vol. 100. BSB B. G. Teubner Verlagsgesellschaft, Leipzig (1987)
Lai, M.-J., Schumaker, L.L.: Spline functions on triangulations. In: Encyclopedia of Mathematics and its Applications, vol. 110. Cambridge University Press, Cambridge (2007)
Landkof, N.S.: Foundations of Modern Potential Theory. Springer, New York (1972). Translated from the Russian by A. P. Doohovskoy, Die Grundlehren der mathematischen Wissenschaften, Band, 180
Li, H.: A-priori analysis and the finite element method for a class of degenerate elliptic equations. Math. Comput. 78(266), 713–737 (2009)
Mamedov, F.I., Amanov, R.A.: On some nonuniform cases of weighted Sobolev and Poincaré inequalities. Algebra i Analiz 20(3), 163–186 (2008). (in Russian)
Muckenhoupt, B.: Weighted norm inequalities for the Hardy maximal function. Trans. Am. Math. Soc. 165, 207–226 (1972)
Nikol’skiĭ, S.M.: Approximation of functions of several variables and imbedding theorems. Springer, New York (1975)
Nochetto, R.H., Otárola, E., Salgado, A.J.: A PDE approach to fractional diffusion in general domains: a priori error analysis. Found. Comput. Math. 1–59. doi:10.1007/s10208-014-9208-x (2014)
Nochetto, R.H., Siebert, K.G., Veeser, A.: Theory of adaptive finite element methods: an introduction. In: DeVore, R., Kunoth, A. (eds.) Multiscale. Nonlinear and Adaptive Approximation, pp. 409–542. Springer, Berlin (2009)
Pérez, C.: Two weighted norm inequalities for Riesz potentials and uniform \(L^p\)-weighted Sobolev inequalities. Indiana Univ. Math. J. 39(1), 31–44 (1990)
Schatz, A.H., Wahlbin, L.B.: Interior maximum norm estimates for finite element methods. Math. Comput. 31(138), 414–442 (1977)
Scott, L.R.: Finite element convergence for singular data. Numer. Math. 21, 317–327 (1973/74)
Scott, L.R., Zhang, S.: Finite element interpolation of nonsmooth functions satisfying boundary conditions. Math. Comput. 54(190), 483–493 (1990)
Seidman, T.I., Gobbert, M.K., Trott, D.W., Kružík, M.: Finite element approximation for time-dependent diffusion with measure-valued source. Numer. Math. 122(4), 709–723 (2012)
Sobolev, S.L.: On a theorem of functional analysis. Mat. Sb 4(46), 471–497 (1938)
Sobolev, S.L.: Nekotorye primeneniya funkcional’ nogo analiza v matematičeskoĭ fizike. Izdat. Leningrad. Gos. Univ, Leningrad (1950)
Stinga, P.R., Torrea, J.L.: Extension problem and Harnack’s inequality for some fractional operators. Commun. Partial Differ. Equ. 35(11), 2092–2122 (2010)
Turesson, B.O.: Nonlinear potential theory and weighted Sobolev spaces. In: Lecture Notes in Mathematics, vol. 1736. Springer, Berlin (2000)
Ziemer, W.P.: Weakly differentiable functions. In: Graduate Texts in Mathematics, vol. 120. Springer, New York (1989)
Acknowledgments
We dedicate this paper to R.G. Durán, whose work at the intersection of real and numerical analysis has been inspirational to us.
Author information
Authors and Affiliations
Corresponding author
Additional information
R. H. Nochetto has been partially supported by NSF Grants DMS-1109325 and DMS-1411808.
E. Otárola has been partially supported by the Conicyt-Fulbright Fellowship Beca Igualdad de Oportunidades and NSF Grants DMS-1109325 and DMS-1411808.
A. J. Salgado has been partially supported by NSF Grant DMS-1418784.
Rights and permissions
About this article

Cite this article
Nochetto, R.H., Otárola, E. & Salgado, A.J. Piecewise polynomial interpolation in Muckenhoupt weighted Sobolev spaces and applications. Numer. Math. 132, 85–130 (2016). https://doi.org/10.1007/s00211-015-0709-6
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00211-015-0709-6