
Abstract
In their work Ikromov and Müller (Fourier Restriction for Hypersurfaces in Three Dimensions and Newton Polyhedra. Princeton University Press, Princeton, 2016) proved the full range \(L^p-L^2\) Fourier restriction estimates for a very general class of hypersurfaces in \({\mathbb {R}}^3\) which includes the class of real analytic hypersurfaces. In this article we partly extend their results to the mixed norm case where the coordinates are split in two directions, one tangential and the other normal to the surface at a fixed given point. In particular, we resolve completely the adapted case and partly the non-adapted case. In the non-adapted case the case when the linear height \(h_\text {lin}(\phi )\) is below two is settled completely.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
For a given smooth hypersurface S in \({\mathbb {R}}^n\), its surface measure \(\mathrm {d}\sigma \), and a smooth compactly supported function \(\rho \geqslant 0\), \(\rho \in C_0^\infty (S)\), the associated Fourier restriction problem asks for which \(p,q \in [1,\infty ]\) the estimate
holds true. This problem was first considered by E.M. Stein in the late 1960s. Soon thereafter the problem was essentially solved for curves in two dimensions, see [4, 7, 34]. The higher dimensional case in its most general form is still wide open. The three dimensional case, as of yet, is far from being completely understood even when S is the sphere, and there has been a lot of deep work in the direction of understanding \(L^p-L^q\) estimates for surfaces with both vanishing and non-vanishing Gaussian curvature. A small sample of such works are [2, 3, 12, 21, 24, 30, 33].
The case when \(q = 2\) has proven to be more tractable since one can use the “\(R^* R\) technique”. This was exploited by Tomas and Stein (see [31]) to obtain the full range of \(L^p-L^2\) estimates when the hypersurface in question is the unit sphere, and later further developed by Greenleaf [11] where the full range of \(L^p-L^2\) estimates was obtained for surfaces with non-vanishing Gaussian curvature. In fact, Greenleaf proved that if one has a decay estimate on the Fourier transform of \(\rho \mathrm {d}\sigma \) (which can be interpreted as a uniform estimate for an oscillatory integral), i.e.,
then the associated restriction estimate holds true for \(p' \geqslant 2(h+1)\) and \(q = 2\). However, in general, this range is not optimal. Recently I.A. Ikromov and D. Müller in their series of works (see [14,15,16], and also their work with M. Kempe [13]) have developed techniques for proving the full range of \(L^p-L^2\) estimates for a very general class of surfaces in \({\mathbb {R}}^3\). Their work builds upon the work of V.I. Arnold and his school (in particular, the work by Varchenko [32]) which highlighted the importance of the Newton polyhedron within problems involving oscillatory integrals, and upon the work of Phong and Stein [25] and Phong et al. [26] in the real analytic case where the authors in addition to the Newton polyhedron used the Puiseux series expansions of roots to obtain results on oscillatory integral operators. For further and more detailed references we refer the reader to [16].
In [16] Ikromov and Müller proved the following theorem.
Theorem 1.1
Let S be a smooth hypersurface in \({\mathbb {R}}^3\) and \(\mathrm {d}\sigma \) its surface measure. After localisation and a change of coordinates assume that S is given as the graph of a smooth function \(\phi : \Omega \rightarrow {\mathbb {R}}\) of finite type with \(\phi (0) = 0\) and \(\nabla \phi (0) = 0\), where \(\Omega \subseteq {\mathbb {R}}^2\) is an open neighbourhood of 0. Furthermore, assume that \(\phi \) is linearly adapted in its original coordinates. Let \(\rho \geqslant 0\), \(\rho \in C_c^\infty (S)\), be a smooth compactly supported function. Then the estimate (1.1) holds true for all \(\rho \) with support contained in a sufficiently small neighbourhood of 0 when \(q=2\) and when either
-
(a)
\(\phi \) is adapted in its original coordinates and \(p \geqslant 2(h(\phi )+1)\), or
-
(b)
\(\phi \) is not adapted in its original coordinates, satisfies the Condition (R), and \(p \geqslant 2(h^{\text {res}}(\phi )+1)\).
Since linear transformations respect the Fourier transform, one can always assume linear adaptedness. The quantities \(h(\phi )\) and \(h^\text {res}(\phi )\) are respectively the height and the restriction height of the function \(\phi \) (the precise definitions can be found in Sects. 1.1 and 2.3 below respectively; also note that we use \(h^{\text {res}}(\phi )\) to denote the restriction height of the function \(\phi \) instead of \(h^{\text {r}}(\phi )\) as in [16]). Condition (R) is a factorisation condition which is true for real analytic functions, but not for general smooth functions, and it remains open whether this condition can be removed in the above theorem.
In this paper we shall be interested in the mixed norm case with \(L^p({\mathbb {R}}^3)\) denoting from now on the space \(L^{p_3}_{x_3} (L^{p_2}_{x_2} (L^{p_1}_{x_1}))\) and \(q = 2\) in (1.1). We shall be interested in the particular case when \(p_1=p_2\), i.e., we only differentiate between the tangential and the normal direction to the surface S at the point \(0 \in S\). This means we take \(\Vert f \Vert _{L^p({\mathbb {R}}^3)}\) to mean
Henceforth we shall denote by p the pair \((p_1, p_3)\). Our task is to determine for which \((p_1,p_3)\) the inequality
holds true for \(\rho \geqslant 0\) supported in a sufficiently small neighbourhood of 0.
This question is of great interest in the theory of PDEs, as was noticed by Strichartz in [29]. Namely, one can obtain mixed norm Strichartz estimates for a wide collection of symbols \(\phi \) determining the surface S since the estimate (1.2) can be reinterpreted as an a priori estimate
for the Cauchy problem
where g has its Fourier transform supported in a small neighbourhood of the origin and \(\phi (D)\) is the operator with symbol \(\phi (\xi )\).
It turns out that we can use the same basic techniques and phase space decompositions as in [16] in proving the estimate (1.2) in the cases we consider (namely, the adapted case and the non-adapted case with \(h_\text {lin}(\phi ) < 2\)). The main additional ingredients we shall use are some basic ideas from [9] (see also [20]) for handling mixed norms. In our case additional complications appear which were absent in the corresponding cases in [16] and some of which resemble problems appearing in some of the final chapters of [16]. For example, after making a phase space decomposition of the kernel of the convolution operator obtained by the “\(R^* R\) technique”, a recurring theme will be that we will not be able to sum absolutely the operators associated to the kernel decomposition pieces whose operators were absolutely summable [16]. A further interesting feature of the mixed norm case is that estimates for the mixed norm endpoint for operators of certain kernel pieces become invariant under scalings considered in [16].
The structure of this article is as follows. In the following Sect. 1.1 we review some fundamental concepts such as the Newton polyhedron and adapted coordinates. In Sect. 1.2 we state the main results of this paper, namely Theorem 1.2 which states the necessary conditions, and Theorem 1.3 which gives us the mixed norm Fourier restriction estimates in the adapted case and the case \(h_{\text {lin}}(\phi ) < 2\). In Sect. 2 we derive the necessary conditions (by means of Knapp-type examples) for the exponents in (1.2). See Proposition 2.1. In Sect. 2.4 we also determine explicitly the Newton polyhedra of \(\phi \) in its original and adapted coordinates in the case when the linear height of \(\phi \) is strictly less than 2. Section 3 contains auxiliary results that we shall often refer to. In Sect. 3.2 we list results related to oscillatory integrals and also some results on oscillatory sums from [16] that are useful in conjunction with complex interpolation. In Sect. 3.3 we state results which we need for handling mixed norms. In Sect. 4, Proposition 4.2, we deal with the adapted case, i.e., we prove that if \(\phi \) is adapted in its original coordinates, then the estimate (1.2) holds for all p’s determined by the necessary conditions, except occasionally for a certain endpoint. In the same section (see Proposition 4.3) we also reduce the general non-adapted case to considering the part near the principal root jet of \(\phi \). In Sects. 5 and 6 we handle the case when the linear height of \(\phi \) is strictly less than 2 for a class of functions \(\phi \) which includes all analytic functions (see Theorem 5.1 for a precise formulation).
For reasons of consistency we use the same notational conventions as in [16]. We use the “variable constant” notation meaning that constants appearing in calculations and in the course of our arguments may have different values on different lines. Furthermore we use the symbols \(\sim , \lesssim , \gtrsim , \ll , \gg \) in order to avoid writing down constants. If we have two nonnegative quantities A and B, then by \(A \ll B\) we mean that there is a sufficiently small positive constant c such that \(A \leqslant cB\), by \(A \lesssim B\) we mean that there is a (possibly large) positive constant C such that \(A \leqslant CB\), and by \(A \sim B\) we mean that there are positive constants \(C_1 \leqslant C_2\) such that \(C_1 A \leqslant B \leqslant C_2 A\). One defines analogously \(A \gg B\) and \(A \gtrsim B\). Often the constants c and C shall depend on certain parameters p in which case we occasionally write \(A \ll _p B\), \(A \lesssim _p B\), etc., in order to emphasize this dependence.
A further notational convention adopted from [16] is the use of symbols \(\chi _0\) and \(\chi _1\) in denoting certain nonnegative smooth compactly supported functions on \({\mathbb {R}}\). Namely, we require \(\chi _0\) to be supported in a neighbourhood of the origin and identically 1 near the origin, and \(\chi _1\) to be supported away from the origin and identically 1 on some open neighbourhood of \(1 \in {\mathbb {R}}\). These cutoff functions \(\chi _0\) and \(\chi _1\) may vary from line to line, and sometimes, when several \(\chi _0\) and \(\chi _1\) appear within the same formula, they may even designate different functions.
1.1 Fundamental concepts and basic assumptions
Let the surface S be given as the graph \(S = S_\phi :=\{ (x_1,x_2,\phi (x_1,x_2)) : x = (x_1,x_2) \in \Omega \subset {\mathbb {R}}^2 \}\) of a smooth and real-valued function \(\phi \) defined on an open neighbourhood \(\Omega \) of the origin. We can assume without loss of generality that \(\phi (0) = 0\) and we take \(\Omega \) to be a sufficiently small neighbourhood of the origin in \({\mathbb {R}}^2\). In the mixed norm case we cannot use the rotational invariance of the Fourier transform in order to reduce to the case \(\nabla \phi (0) = 0\). Instead we use a different linear transformation (for details see Sect. 3.1), and so we may and shall assume \(\nabla \phi (0) = 0\).
Next, we impose on \(\phi \) to be a function of finite type at 0. This means that there exists a multi-index \(\alpha \in {\mathbb {N}}_0^2\) such that \(\partial ^\alpha \phi (0) \ne 0\). By continuity, \(\phi \) is of finite type on a neighbourhood of 0. We may therefore assume that \(\phi \) is of finite type in each point of \(\Omega \). We define the Taylor support of \(\phi \) as the set \({\mathcal {T}}(\phi ) :=\{ \alpha \in {\mathbb {N}}_0^2 : \partial ^\alpha \phi (0) \ne 0 \}\). The Newton polyhedron \({\mathcal {N}}(\phi )\) of \(\phi \) is the convex hull of the set \(\bigcup _\alpha \{(t_1,t_2) \in {\mathbb {R}}^2 : t_1 \geqslant \alpha _1, t_2 \geqslant \alpha _2 \}\), where the union is over all \(\alpha \) such that \(\partial ^\alpha \phi (0) \ne 0\) (and so \(|\alpha | \geqslant 2\)). See Fig. 1. Both edges and vertices are called faces of \({\mathcal {N}}(\phi )\). We define the Newton diagram \({\mathcal {N}}_d(\phi )\) of \(\phi \) to be the union of all compact faces of \({\mathcal {N}}(\phi )\).
If we are given a face \(e_0\) of \({\mathcal {N}}(\phi )\), we can define its associated (formal) series
If \(e_0\) is a compact face, then \(\phi _{e_0}(x_1, x_2)\) is a mixed homogeneous polynomial. This means that there exists a weight \(\kappa ^{e_0} = (\kappa ^{e_0}_1,\kappa ^{e_0}_2) \in [0,\infty )^2\) such that for any \(r > 0\) we have \(\phi _{e_0}(r^{\kappa ^{e_0}_1} x_1, r^{\kappa ^{e_0}_2} x_2) = r \phi _{e_0}(x_1, x_2)\), and we call \(\phi _{e_0}\) a \(\kappa ^{e_0}\)-homogeneous polynomial. \(\kappa ^{e_0}\) is uniquely determined if and only if \(e_0\) is not a vertex. In fact, in the case when \(e_0\) is an edge, we define \(L_{\kappa ^{e_0}}\) to be the unique line containing \(e_0\):
Then the weight \(\kappa ^{e_0}\) is uniquely determined by the relation
When \(e_0\) is an unbounded face, \(\phi _{e_0}(x_1, x_2)\) is to be taken only as a formal power series. Note that then \(e_0\) is either a vertical or horizontal edge of \({\mathcal {N}}(\phi )\), and we can also find unique \(\kappa ^{e_0}_1\) and \(\kappa ^{e_0}_2\) (one of them being 0 in this case) such that (1.4) holds.
Of particular interest is the principal face \(\pi (\phi )\) defined as the face of minimal dimension of \({\mathcal {N}}(\phi )\) which intersects the bisectrix \(\{(t_1,t_2) \in {\mathbb {R}}^2 : t_1 = t_2\}\). Its associated series (or homogeneous polynomial) we call the principal part of \(\phi \) and denote by \(\phi _{\text {pr}} :=\phi _{\pi (\phi )}\). Let \(\kappa = (\kappa _1,\kappa _2)\) determine the line \(L_{\kappa }\) as in (1.5) containing the principal face if it is an edge, or when it is a vertex, let \(\kappa \) determine the edge of \({\mathcal {N}}(\phi )\) having the principal face as its left endpoint. Interchanging the \(x_1\) and \(x_2\) coordinates, if necessary, we may always assume that \(\kappa _2 \geqslant \kappa _1\). We shall denote the ratio \(\kappa _2/\kappa _1\) by m, and so \(m \geqslant 1\).
The Newton distance \(d(\phi )\) of \(\phi \) is defined to be the coordinate d of the point (d, d) which is the intersection of the bisectrix and the principal face of \({\mathcal {N}}(\phi )\). One can easily see that if \(\kappa = (\kappa _1,\kappa _2)\) determines the line containing the principal face (or any of the supporting lines to \({\mathcal {N}}(\phi )\) in case \(\pi (\phi ) = \{(d,d)\}\)), then we have \(d(\phi ) = 1/(\kappa _1+\kappa _2)\).
The Newton height \(h(\phi )\) of \(\phi \) is defined as
By a smooth local coordinate change we mean a function \(\varphi \) which is smooth and invertible in a neighbourhood of the origin, and \(\varphi (0) = 0\). We also define the linear height as
For a coordinate change \(\varphi \) we shall denote the new cooridnates by \(y = \varphi (x)\). In this case we also denote \(d_y = d(\phi \circ \varphi )\). We say that \(\phi \) is adapted in the y coordinates if \(d_y = h(\phi )\). Analogously, we say that \(\phi \) is linearly adapted in coordinates y if \(d_y = h_{\text {lin}}(\phi )\). When \(\phi \) is adapted in its original coordinates x we say that \(\phi \) is adapted, and if \(\phi \) is not adapted in its original coordinates, then we say that \(\phi \) is non-adapted. Analogous expressions we shall use for linear adaptedness. We obviously always have \(d_x = d(\phi ) \leqslant h_{\text {lin}}(\phi ) \leqslant h(\phi )\).
The existence of an adapted coordinate system for real analytic functions on \({\mathbb {R}}^2\) was first proven by Varchenko in [32]. He gave an explicit algorithm on how to construct an adapted coordinate system. His result was generalised in [14] where it was shown that an adapted coordinate system exists for general smooth functions. It turns out that in the smooth case one can also essentially use Varchenko’s algorithm. In this article when we refer to Varchenko’s algorithm we shall always mean the variant used in [14]. In this variant one constructs an adapted coordinate system in the form of a non-linear shear transformation
The smooth real-valued function \(\psi \) can be taken in the real-analytic case to be the principal root jet of \(\phi \) as defined in [16]. We denote the function \(\phi \) in the new (adapted) coordinates by \(\phi ^a\). Then we have
We remark that when \(\phi \) is not adapted, then \(m = \kappa _2/\kappa _1\) is a positive integer and \(\psi (x_1) - b_1 x_1^m = {\mathcal {O}}(x_1^{m+1})\) for some nonzero real constant \(b_1\).
We introduce next Varchenko’s exponent \(\nu (\phi ) \in \{0,1\}\). If \(h(\phi ) \geqslant 2\) and there exists an adapted coordinate system y such that in these coordinates the principal face of \(\phi ^a(y)\) is a vertex, we define \(\nu (\phi ) :=1\). In all other cases we take \(\nu (\phi ) :=0\). In particular \(\nu (\phi ) = 0\) whenever \(h(\phi ) < 2\). A concrete characterisation for determining when an adapted coordinate system having the principal face as a vertex exists can be found in [15, Lemma 1.5].
Let us discuss next linear adaptedness. We assume that \(h_{\text {lin}}(\phi ) < h(\phi )\), i.e., that we cannot achieve adapted coordinates with a linear coordinate change. In [16, Section 1.3] it was shown that in this case we can always find a linearly adapted coordinate system, and [16, Proposition 1.7] gives an explicit characterisation of when a coordinate system is linearly adapted. It was shown in particular that if the coordinate system x is not already linearly adapted, then one just needs to apply the first step of Varchenko’s algorithm in order to obtain it.
Since in our mixed norm case we consider only \(p_1=p_2\), we can freely use linear coordinate changes in “tangential” variables \((x_1,x_2)\) in the expression (1.2). Thus we may assume without loss of generality that either the original coordinate system x is already adapted, or that it is at least linearly adapted. In particular, we may assume \(d(\phi ) = h_{\text {lin}}(\phi )\).
The final important concept we introduce is the augmented Newton polyhedron \({\mathcal {N}}^{\text {res}}(\phi ^a)\) of a non-adapted \(\phi \) (note the slight change in notation compared to [16], where \({\mathcal {N}}^{\text {r}}(\phi ^a)\) is used instead). \({\mathcal {N}}^{\text {res}}(\phi ^a)\) is defined as the convex hull of the set
where \(L^+\) is defined as follows. Let \(L_{\kappa }\) be the line containing the principal face \(\pi (\phi )\) of \({\mathcal {N}}(\phi )\) and let \(P = (t^P_1, t^P_2)\) be the point on \(L_{\kappa } \cap {\mathcal {N}}(\phi ^a)\) with the smallest \(t_2\) coordinate. Such a point always exists. Then \(L^+\) is the ray
(See Fig. 1).

The (augmented) Newton polyhedron associated to \(\phi ^a\)
1.2 The main results
Let us briefly review all the conditions on the function \(\phi \) which we may assume without loss of generality when considering the mixed norm restriction problem:
-
\(\phi (0)=0\) and \(\nabla \phi (0) = 0\),
-
\(\phi \) is of finite type on \(\Omega \),
-
the weight \(\kappa \) determined by the principal face of \({\mathcal {N}}(\phi )\) (or by the edge containing the principal face as its left endpoint) satisfies \(m = \kappa _2 / \kappa _1 \geqslant 1\), and
-
the original coordinate system x is either adapted, or linearly adapted but not adapted. In both cases we have \(d(\phi ) = h_{\text {lin}}(\phi )\).
Recall that S denotes the surface given as the graph of \(\phi \) and \(\mathrm {d}\sigma \) its surface measure. We are considering the mixed norm Fourier restriction problem (1.2) when \(\rho \) is supported in a sufficiently small neighbourhood of the origin.
We begin by stating necessary conditions which will be obtained by means of Knapp-type examples. When \(\phi \) is not adapted we denote by
the function defined in the following way. Consider all lines of the form
where \({\tilde{\kappa }} \in [0,\infty )^2\) is a weight. For each \(0 \leqslant {\tilde{\kappa }}_1 \leqslant \kappa _1\) there is a unique \({\tilde{\kappa }}_2\) so that (1.6) determines a supporting line \(L_{{\tilde{\kappa }}}\) to \({\mathcal {N}}^{\text {res}}(\phi ^a)\). We then define \(K({\tilde{\kappa }}_1)\) to be \({\tilde{\kappa }}_2\) for \({\tilde{\kappa }}_1 \in [0,\kappa _1]\) (see Fig. 2). Note that then the weight (0, K(0)) determines line containing the horizontal edge of the augmented Newton polyhedron, i.e., the right most edge of \({\mathcal {N}}^{\text {res}}(\phi ^a)\). The weight \((\kappa _1, K(\kappa _1)) = \kappa \) determines the line containing the edge associated to the principal face of \({\mathcal {N}}(\phi )\) which is the left most edge of \({\mathcal {N}}^{\text {res}}(\phi ^a)\).

The typical form of the graph of the function \(K : {\tilde{\kappa }}_1 \mapsto {\tilde{\kappa }}_2\)
Denote by \({\mathcal {L}}\) the Legendre transformation, which acts on real-valued convex functions K by:
Then we may state the necessary conditions in the following way:
Theorem 1.2
Let \(\phi \) be as above and let us assume that the estimate (1.2) holds true with \(\rho (0) \ne 0\). If \(\phi \) is adapted, then we have the necessary condition
If K is as above and \(\phi \) is linearly adapted, but not adapted, then we necessarily have
Recall that \(d(\phi ) = h(\phi )\) when \(\phi \) is adapted. The above theorem is a direct consequence of Proposition 2.1 in Sect. 2 below and the discussion in Sect. 2.2. The necessary conditions are depicted in Fig. 3.
The main result of this paper is:
Theorem 1.3
Let \(\phi \) be as above and \(\rho \) supported in a sufficiently small neighbourhood of 0. If either
-
(a)
\(\phi \) is adapted in its original coordinates, or
-
(b)
\(\phi \) is non-adapted, \(h_{\text {lin}}(\phi ) < 2\), and \(\phi \) is real analytic,
then the estimate (1.2) holds true for all \((1/p_1',1/p_3')\) as determined by Theorem 1.2, except for the point \((1/p_1',1/p_3') = (0,1/(2h(\phi )))\) where it is false if \(\rho (0) \ne 0\) and either \(h(\phi ) = 1\) or \(\nu (\phi ) = 1\).
In case (b) we shall actually prove the claim for a more general class of functions than is stated here.
The part (a) of the above theorem follows from Proposition 4.2, and the part (b) follows from Theorem 5.1 Let us mention that in the case \(h_{\text {lin}}(\phi ) < 2\) it turns out that we always have \(\nu (\phi ) = 0\), which will be important for the boundary point \((1/p_1',1/p_3') = (0,1/(2h(\phi )))\).
In this article we do not deal with the non-adapted case when \(h_\text {lin}(\phi ) \geqslant 2\) in its full generality. Let us briefly comment how one can easily get some preliminary Fourier restriction estimates. Namely, the abstract result from [20] by Keel and Tao implies that we automatically have the Fourier restriction estimate for the region labeled by KT in Fig. 3 below. For details we refer to Proposition 4.1.
One can combine this result with the case \(p_1=p_3\) from Theorem 1.1 and get by interpolation the region labeled by IM in Fig. 3.

Necessary conditions in the \((1/p_1',1/p_3')\)-plane
2 Necessary conditions
In this section our assumptions on \(\phi \) are as explained in Sect. 1.2. Our goal is to find a complete set of necessary conditions on \(p = (p_1,p_3) \in [1,\infty ]^2\) for (1.2) to hold true whenever \(\rho (0) \ne 0\). We shall reframe the conditions in several ways: an “explicit” form in Sect. 2.1, a form as in Theorem 1.2 using the Legendre transformation of K in Sect. 2.2, and a form when we fix the ratio \(p_1'/p_3'\) in Sect. 2.3. In Sect. 2.4 we discuss the normal forms of \(\phi \) when \(h_{\text {lin}}(\phi ) < 2\) and determine explicitly the necessary conditions in this case.
2.1 The explicit form
Let us first introduce some further notation. Recall that if \(\phi \) is linearly adapted but not adapted, then the adapted coordinate system is obtained through \((y_1, y_2) = (x_1, x_2 - \psi (x_1))\), where \(\psi \) is the principal root jet, and recall that the function \(\phi \) in the new coordinates y is \(\phi ^a(y_1,y_2) = \phi (y_1, y_2 + \psi (y_1))\), i.e., \(\phi ^a\) represents the function \(\phi \) in adapted coordinates. We denote the vertices of \({\mathcal {N}}(\phi ^a)\) by
where \(n \geqslant 0\) and we assume that the points are ordered from left to right, i.e., \(A_{l-1} < A_l\) for \(l = 1,2,\ldots ,n\). Next, we denote the compact edges of \({\mathcal {N}}(\phi ^a)\) by
and also the unbounded edges by
see Fig. 1. Let us denote by \(L_l, \, l = 0, \ldots , n+1\), the associated lines on which these edges lie. Each line \(L_l\) is given by the equation
where \((\kappa _1^l, \kappa _2^l) \in [0,\infty )^2\) is its associated weight. We also introduce the quantity \(a_l :={\kappa _2^l}/{\kappa _1^l}\), which is related to the slope of \(L_l\), namely, its slope is then equal to \(-1/a_l\). We obviously have \(a_0 = 0\) and \(a_{n+1} = \infty \).
Recall that we denote by \(0< m < \infty \) the leading exponent in the Taylor expansion of \(\psi \) and that we define \(L_{\kappa }\) to be the unique line \(\kappa _1 t_1 + \kappa _2 t_2 = 1\) satisfying \(\kappa _2 = m \kappa _1\) and which is a supporting line to the Newton polyhedron \({\mathcal {N}}(\phi ^a)\) (see Fig. 1). This line coincides with the line containing the principal face of \({\mathcal {N}}(\phi )\), as follows from Varchenko’s algorithm.
Next, let \(l_0\) be such that \(a_{l_0} > m \geqslant a_{l_0-1}\). Note that the point \((A_{l_0-1},B_{l_0-1})\) is the right endpoint of the intersection of \(L_{\kappa }\) and \({\mathcal {N}}(\phi ^a)\). Varchenko’s algorithm also shows that \(B_{l_0-1} \geqslant A_{l_0-1}\). We denote by \(l^a\) the index such that \(\kappa ^{l^a}\) is associated to the principal face of \({\mathcal {N}}(\phi ^a)\). If \(\pi (\phi ^a)\) is a vertex, we take \(l^a\) to be associated to the edge to the left of \(\pi (\phi ^a)\). Note \(l^a \geqslant l_0\).
Now we can express the augmented Newton polyhedron \({\mathcal {N}}^{\text {res}}(\phi ^a)\) as the convex hull of the set \({\mathcal {N}}(\phi ^a) \cup L_\kappa ^+\), where \(L_\kappa ^+\) denotes the ray \(\{ (t_1,t_2) \in L_{\kappa } : t_2 \geqslant B_{l_0-1}\}\).
Before stating the necessary conditions analogous to [16, Proposition 1.16], let us recall that in the case of the principal face being a vertex, we take \(\kappa \) to determine the line containing the edge of \({\mathcal {N}}(\phi )\) which has \(\pi (\phi )\) as its left endpoint. Furthermore recall that \(m = \kappa _2 / \kappa _1 \geqslant 1\) and that \(\phi \) is linearly adapted in its original coordinates.
Proposition 2.1
Let \(\phi \) be as above. Let \(\rho \geqslant 0\), \(\rho \in C_0^\infty (S)\), be a smooth compactly supported function with \(\rho (0) \ne 0\), and assume that the estimate (1.2) holds true. If \(\phi \) is non-adapted, let us consider the nonlinear shear transformation \((y_1, y_2) = (x_1, x_2 - \psi (x_1))\) and let \(\phi ^a(y) :=\phi (y_1,y_2+\psi (y_1))\) be the function \(\phi \) expressed in the adapted coordinates. Then it necessarily follows that for all weights \(({\tilde{\kappa }}_1,{\tilde{\kappa }}_2)\) such that \(L_{{\tilde{\kappa }}}\) is a supporting line to \({\mathcal {N}}^\text {res}(\phi ^a)\) we have
This is equivalent to
Furthermore, when \(\phi \) is either adapted or non-adapted we have the conditions
In particular when \(\phi \) is non-adapted the first condition in (2.3) then coincides with the one in the second line of (2.2). Moreover in this case the conditions in (2.2) for \(l > l^a\) are redundant, and if we fix \(p_3' = \infty \) (resp. \(p_1' = \infty \)) then all the conditions reduce to \(p_1' \geqslant 2\) (resp. \(p_3' \geqslant 2h(\phi )\)).
Proof
We give only a sketch of the proof since it follows the same lines as in [16]. Let us consider any supporting line \(L_{{\tilde{\kappa }}}\) to the augmented Newton polyhedron \({\mathcal {N}}^\text {res}(\phi ^a)\) for some weight \(({\tilde{\kappa }}_1,{\tilde{\kappa }}_2)\). This particularly implies by the definition of the augmented Newton diagram that \({\tilde{\kappa }}_2 \geqslant m {\tilde{\kappa }}_1\).
We first consider the case when \({\tilde{\kappa }}_1 > 0\), i.e., when the associated line \(L_{{\tilde{\kappa }}}\) is not horizontal. In this case for each sufficiently small \(\varepsilon > 0\) we define the region \(D_\varepsilon ^a :=\{ y \in {\mathbb {R}}^2 : |y_1| \leqslant \varepsilon ^{{\tilde{\kappa }}_1}, |y_2| \leqslant \varepsilon ^{{\tilde{\kappa }}_2} \}\), which in the original coordinate system has the form \(D_\varepsilon :=\{ x \in {\mathbb {R}}^2 : |x_1| \leqslant \varepsilon ^{{\tilde{\kappa }}_1}, |x_2-\psi (x_1)| \leqslant \varepsilon ^{{\tilde{\kappa }}_2} \}\). Using the \(\phi ^a_{{\tilde{\kappa }}}\) part of the Taylor approximation of \(\phi ^a\) one easily gets that for each \(y \in D_\varepsilon ^a\) we have \(|\phi ^a(y)| \leqslant C \varepsilon \). Returning to the x coordinates we obtain \(|\phi (x)| \leqslant C \varepsilon \) when \(x \in D_\varepsilon \). But for \(x \in D_\varepsilon \) one has
since \(|\psi (x_1)| \lesssim |x_1|^{m}\) and \({\tilde{\kappa }}_2 \geqslant m {\tilde{\kappa }}_1\). Therefore the region \(D_\varepsilon \) is contained in the set where \(|x_1| \leqslant C_1 \varepsilon ^{{\tilde{\kappa }}_1}\) and \(|x_2| \leqslant C_2 \varepsilon ^{m {\tilde{\kappa }}_1}\). Thus, we choose a Schwartz function \(\varphi _\varepsilon \) which has its Fourier transform of the form
for some smooth compactly supported function \(\chi _0\) which is identically 1 on the interval \([-1,1]\). Then in particular we have \(\widehat{\varphi _\varepsilon }(x_1,x_2,\phi (x_1,x_2)) \geqslant 1\) on \(D_\varepsilon \).
Now on the one hand, since \(\rho (0) \ne 0\), we have
and on the other
Plugging these into (1.2) and letting \(\varepsilon \rightarrow 0\) one obtains (2.1) for the non-horizontal edges.
In the horizontal case \({\tilde{\kappa }}_1 = 0\) one only slightly changes the argument. Namely, one defines for a sufficiently small \(\delta > 0\) the set \(D_\varepsilon ^a :=\{ y \in {\mathbb {R}}^2 : |y_1| \leqslant \varepsilon ^{\delta }, |y_2| \leqslant \varepsilon ^{{\tilde{\kappa }}_2} \}\). The associated set in the x coordinates \(D_\varepsilon \) is then contained in the box determined by \(|x_1| \leqslant \varepsilon ^\delta \) and \(|x_2| \leqslant \varepsilon ^{m \delta }\). Furthermore, using a Taylor series expansion, one can easily show that for \(x \in D_\varepsilon \) we have again \(|\phi (x)| \leqslant C \varepsilon \). Now one proceeds as in the non-horizontal case, the only difference is that after taking the limit \(\varepsilon \rightarrow 0\), one also needs to take the limit \(\delta \rightarrow 0\).
Let us now briefly explain why (2.1) and (2.2) are equivalent. We obviously have that (2.1) implies (2.2). For the reverse implication we note that the \({\tilde{\kappa }}\)’s considered in (2.2) are by definition precisely those for which the lines \(L_{{\tilde{\kappa }}}\) contain the edges of the augmented Newton diagram. This means that all the other supporting lines touch the augmented Newton diagram at only one point. Now one just uses the fact that the associated weight \({\tilde{\kappa }}\) of such a supporting line \(L_{{\tilde{\kappa }}}\) is obtained by a convex combination of weights associated to the edges which intersect at the point through which \(L_{{\tilde{\kappa }}}\) passes. Thus, all the conditions in (2.1) can be obtained as convex combinations of conditions in (2.2).
The proof of (2.3) is similar to the one for (2.1). One considers the set \(D_\varepsilon \) defined by \(\{ x \in {\mathbb {R}}^2 : |x_1| \leqslant \varepsilon ^{\kappa _1}, |x_2| \leqslant \varepsilon ^{\kappa _2} \}\) in the case when the principal face of \({\mathcal {N}}(\phi )\) is compact. If it is not compact, then one uses \(\{ x \in {\mathbb {R}}^2 : |x_1| \leqslant \varepsilon ^{\delta }, |x_2| \leqslant \varepsilon ^{\kappa _2} \}\). Using the Taylor approximation of \(\phi (x)\) one gets that for \(x \in D_\varepsilon \) we have \(|\phi (x)| \lesssim \varepsilon \). The first condition in (2.3) is then obtained by plugging
into the estimate (1.2) in the compact case. In the non-compact case we just change \(\varepsilon ^{\kappa _1}\) to \(\varepsilon ^\delta \).
In the adapted case, when \(d(\phi ) = h(\phi )\), we also get automatically the second condition from the first one. Finally, as was mentioned at the beginning of this section, if \(\phi \) is non-adapted and if we take l such that \(\kappa ^l\) is associated to the principal face of \({\mathcal {N}}(\phi ^a)\), then we have \(h(\phi ) = 1/(\kappa _1^l + \kappa _2^l)\). Therefore the associated condition to this l in (2.2) implies the second condition in (2.3).
Let us now prove the remaining claims. When \(p_1' = \infty \), then all the conditions indeed reduce to \(1/p_3' \leqslant 1/(2h(\phi ))\) since \(\kappa _1^l+\kappa _2^l\) is minimal precisely for the edge \(\gamma _{l^a}\) which intersects the bisectrix of \({\mathcal {N}}(\phi ^a)\). This is a direct consequence of the fact that the augmented Newton polyhedron is obtained by the intersection of upper half-planes which have \(L_{\kappa }\) and \(L_l\)’s with \(\kappa _2^l/\kappa _1^l > m\) (i.e., for \(l \geqslant l_0\)) as boundaries, and of the fact that the bisectrix intersects \(L_l\) at \((1/(\kappa _1^l+\kappa _2^l), 1/(\kappa _1^l+\kappa _2^l))\).
When \(p_3' = \infty \), then the condition \(1/p_1' \leqslant 1/2\) is the strongest one; this is a direct consequence of \(\kappa _2^l/\kappa _1^l > m = \kappa _2/\kappa _1\).
We finally prove that one does not need to consider all the conditions in the first row of (2.2), but only for \(l = l_0,\ldots ,l^a\) where \(l^a\) is such that \(\gamma _{l^a}\) is the principal face of \({\mathcal {N}}(\phi ^a)\). This follows from the following two facts. Namely, we first note that the line in the \((1/p_1',1/p_3')\)-plane given by
intersects the axis \(1/p_1' = 0\) at the point which has the \(1/p_3'\) coordinate equal to \((\kappa _1^l+\kappa _2^l)/2\), which is greater than \(1/(2h(\phi ))\) if \(l \ne l^a\), by the previous discussion in the case \(p_1' = \infty \). And secondly, as \(\kappa _1^l\) decreases when l increases, the slope of the line (2.4) in the \((1/p_1',1/p_3')\)-plane increases with l too. Therefore, in the \((1/p_1',1/p_3')\)-plane the lines given by (2.4) and corresponding to necessary conditions associated to any l with \(l > l^a\) are lying above the line associated to \(l^a\) in the area where \(1/p_1' \geqslant 0\). \(\square \)
The necessary conditions from Proposition 2.1 determine a polyhedron in the \((1/p_1',1/p_3')\)-plane which we denote by \({\mathcal {P}}\) (see Fig. 3). Let us define the lines
associated to the necessary conditions. Using arguments similar as in the proof of Proposition 2.1, or the Legendre transformation from the following Sect. 2.2, one can show that the polyhedron \({\mathcal {P}}\) is of the form \({\mathcal {P}} = OPP_{l_0}P_{l_0+1}\ldots P_{l^a-1}P_{l^a}{\tilde{P}}\), i.e., the polyhedron with vertices \(O, P, P_{l_0}, P_{l_0+1}, \ldots , P_{l^a-1}, P_{l^a}, {\tilde{P}}\), where the point O is the origin and the other points are as follows. The point P is (1/2, 0) and the point \({\tilde{P}}\) is \((0,1/(2h(\phi )))\). The point \(P_{l_0}\) is the intersection of \({\tilde{L}}\) and \({\tilde{L}}_{l_0}\), and all the other points \(P_{l}\) are given as intersections of the lines \({\tilde{L}}_{l}\) and \({\tilde{L}}_{l-1}\) for \(l = l_0+1, \ldots , l^a\).Footnote 1
As in the \(p_1=p_3\) case considered in [16], we expect that the conditions from Proposition 2.1 are sharp. This will of course follow if we prove that the Fourier restriction estimate is true within the range they determine. In the adapted case, when \(d(\phi ) = h(\phi )\), the only condition we obtained was
This condition is sharp as will be shown in Sect. 4, though sometimes the endpoint estimate on the \(1/p_3'\) axis will not hold.
2.2 The form using the Legendre transformation
As already noted, the necessary conditions can be stated as
for all \(({\tilde{\kappa }}_1,{\tilde{\kappa }}_2)\) such that \(L_{{\tilde{\kappa }}}\) is a supporting line to the augmented Newton polyhedron of \(\phi ^a\). This can be rewritten as
As in Sect. 1.2 we denote by K the function associating to each \({\tilde{\kappa }}_1 \in [0,\kappa _1]\) the \({\tilde{\kappa }}_2\) such that \(L_{{\tilde{\kappa }}}\) is a supporting line to the augmented Newton polyhedron of \(\phi ^a\), i.e., we have \({\tilde{\kappa }} = ({\tilde{\kappa }}_1, K({\tilde{\kappa }}_1))\). The Legendre transformation of K is given by (1.7) and thus we have
We have depicted the graph of K in Fig. 2.
2.3 Conditions when the ratio is fixed
If we fix a ratio \(r = p_1'/p_3' \in [0,\infty ]\), then we are able to introduce a quantity slight more general than the restriction height \(h^{\text {res}}(\phi )\) introduced in [16]. We shall not use this quantity in this article, but it may prove useful when considering the mixed norm Fourier restriction for functions \(\phi \) with \(h_{\text {lin}}(\phi ) \geqslant 2\). The cases \(r \in \{0,\infty \}\) are not interesting since we shall prove the associated results in Sect. 4 easily, so we assume that \(r \in (0,\infty )\) is fixed. In this case by plugging in \(p_1' = rp_3'\) the conditions (2.2) can be restated as
where again \({\tilde{\kappa }}\) is such that \(L_{{\tilde{\kappa }}}\) is a supporting line to the augmented Newton polyhedron \({\mathcal {N}}^\text {res}(\phi ^f)\). But now we notice that the number on the right hand side of the above inequality is actually the \(t_2\)-coordinate of the intersection of the line \(L_{{\tilde{\kappa }}}\) with the parametrised line \(t \mapsto ( t - \frac{1+m}{r},t )\), which we shall denote by \(\Delta ^{(m)}_r\). This motivates us to define
when \(\kappa _2^l/\kappa _1^l > m\) (i.e., for \(l \geqslant l_0\)). Then, if we define
the conditions (2.2) can be restated as the requirement that the inequalities
must hold necessarily true for all \(r \in (0,\infty )\), along with the inequalities \(p_1' \geqslant 2\) and \(p_3' \geqslant 2h(\phi )\), representing the respective cases \(r = 0\) and \(r = \infty \).
By definition, the restriction height \(h^{\text {res}}(\phi )\) from [16] coincides with \(h^{\text {res}}_r(\phi )\) when \(r = 1\), and in the same way as in [16] we see from (2.6) that \(h^{\text {res}}_r(\phi )+1\) can be read off as the \(t_2\)-coordinate of the point where the line \(\Delta ^{(m)}_r\) intersects the augmented Newton diagram of \(\phi ^a\) (see Fig. 4).

The restriction height
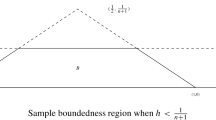
2.4 Necessary conditions when \(h_\text {lin}(\phi ) < 2\)
In the case when \(\phi \) is non-adapted and the linear height of \(\phi \) is strictly less than 2 it turns out that there are only two necessary conditions from Proposition 2.1. Namely, in this case we shall show that \(l_0 = l^a\), and therefore the only conditions are
If we replace above the inequality signs with equality signs, we get two linear equations in \((1/p_1',1/p_3')\). Let \((1/{\mathfrak {p}}_1',1/{\mathfrak {p}}_3')\) be the solution of this system. We shall call \({\mathfrak {p}} = ({\mathfrak {p}}_1,{\mathfrak {p}}_3)\) the critical exponent. Then, by interpolation, it is sufficient to prove the Fourier restriction estimate (1.2) for the exponent \({\mathfrak {p}}\) and the endpoint exponents associated to the points lying on the axes, i.e., (1/2, 0) and \((0,1/(2h(\phi )))\).
In order to obtain what precisely the critical exponent \({\mathfrak {p}}\) is, we recall [16, Proposition 2.11] which gives us explicit normal forms of \(\phi \) in the case when \(h_\text {lin}(\phi ) < 2\). In the real analytic case these normal forms were derived in [27] by Siersma. [16, Proposition 2.11] states that there are two type of singularities, A and D.
In the case of A type singularity the form of the function \(\phi \) is
Here \(\psi \), b, and \(b_0\) are smooth functions such that \(\psi (x_1) = cx_1^m + {\mathcal {O}}(x_1^{m+1})\) (with \(c \ne 0\) and \(m \geqslant 2\)), \(b(0,0) \ne 0\), and \(b_0(x_1) = x_1^n \beta (x_1)\) (with either \(\beta (0) \ne 0\) and \(n \geqslant 2m+1\), or \(b_0\) is flat, i.e., “\(n = \infty \)”). The function \(\psi \) is the principal root jet of \(\phi \). If \(b_0\) is flat, this is \(A_\infty \) type singularity, and otherwise it is \(A_{n-1}\) type singularity. In adapted coordinates, the formula (2.8) turns into
where \(b^a(y_1,y_2) = b(y_1,y_2+\psi (y_1))\), i.e., the function b in \((y_1,y_2)\) coordinates. From the formulas (2.8) and (2.9) one can now determine the form of the Newton polyhedron of \(\phi \) and \(\phi ^a\) (see Fig. 5). Reading off the Newton polyhedra we have
and so the necessary conditions (2.2) can be written as
Now an easy calculation shows that \((1/{\mathfrak {p}}_1',1/{\mathfrak {p}}_3') = (1/(2m+2),1/4)\), i.e., we have determined the critical exponent.

The Newton polyhedra associated to \(A_{n-1}\) type singularity in the (linearly adapted) original and adapted coordinates respectively, and the associated necessary conditions

The Newton polyhedra associated to \(D_{n+1}\) type singularity in the (linearly adapted) original and adapted coordinates respectively, and the associated necessary conditions
In the case of D type singularity [16, Proposition 2.11] tells us that
i.e., the function b from (2.8) is now to be written as \(b(x_1,x_2) = x_1 b_1(x_1,x_2) + x_2^2 b_2(x_2)\). In this case we have the conditions \(b_1(0,0) \ne 0\) and \(b_2(x_2) = c_2 x_2^k + {\mathcal {O}}(x_2^{k+1})\). Again \(\psi (x_1) = cx_1^m + {\mathcal {O}}(x_1^{m+1})\) (\(c \ne 0\), \(m \geqslant 2\)) and \(b_0(x_1) = x_1^n \beta (x_1)\), but now either \(\beta (0) \ne 0\) and \(n \geqslant 2m+2\), or \(b_0\) is flat. If \(b_0\) is flat, this is \(D_\infty \) type singularity, and otherwise it is \(D_{n+1}\) type singularity. The function \(b_1^a\) is the function \(b_1\) in \((y_1,y_2)\) coordinates. Now one determines the form of the Newton polyhedra (see Fig. 6) and reads off that
Therefore, the necessary conditions can be written as
Again, a simple calculation shows that \((1/{\mathfrak {p}}_1',1/{\mathfrak {p}}_3') = (1/(4m+4),1/4)\).
Note that in the \(A_\infty \) and \(D_\infty \) cases the necessary conditions form a right-angled trapezium in the \((1/p_1',1/p_3')\)-plane (easily seen by taking \(n \rightarrow \infty \); one can also do a direct calculation). As the critical exponents in the cases \(A_{n-1}\) and \(D_{n+1}\) do not depend on n, one is easily convinced that the critical exponents of \(A_\infty \) and \(D_\infty \) cases are equal to the respective critical exponents of \(A_{n-1}\) and \(D_{n+1}\).
3 Auxiliary results
3.1 Reduction to the case \(\nabla \phi (0) = 0\)
In Sect. 1.1 we mentioned that one can always reduce the mixed normed Fourier restriction problem to the case when \(\nabla \phi (0) = 0\), despite rotational invariance not being at one’s disposal. Let us justify this. Consider the linear transformation \(L(x_1,x_2,x_3) :=(x_1,x_2,x_3 + \partial _1 \phi (0) x_1 + \partial _2 \phi (0) x_2)\) whose inverse and transpose are respectively \(L^{-1}(x_1,x_2,x_3) = (x_1,x_2,x_3 - \partial _1 \phi (0) x_1 - \partial _2 \phi (0) x_2)\) and \(L^t(x_1,x_2,x_3) = (x_1 + \partial _1 \phi (0) x_3, x_2 + \partial _2 \phi (0) x_3, x_3)\). Plugging in the function \(f \circ L^t\) into the expression of the mixed norm Fourier restriction estimate (1.2) we obtain
Now one just notices that \(\Vert f \circ L^t \Vert _{L^{p_3}_{x_3} (L^{p_1}_{(x_1,x_2)})} = \Vert f \Vert _{L^{p_3}_{x_3} (L^{p_1}_{(x_1,x_2)})}\), and that
since the determinant of L is 1. Thus the estimate (1.2) with the function \(\phi \) is equivalent (up to a slight change in amplitude due to the Jacobian factor \(\sqrt{1+|\nabla \phi (\xi )|^2}\)) to the same estimate with the function \(\phi \) replaced by the function \(\xi \mapsto \phi (\xi ) - \xi \cdot \nabla \phi (0)\), which has gradient 0 at the origin.
3.2 Auxiliary results related to oscillatory sums and integrals
We first mention that we shall often use the more or less standard van der Corput Lemma from [16] (see [16, Lemma 2.1]), originating from the work of van der Corput [5].Footnote 2
Another lemma (less general, but with a stronger implication than the one in [16, Section 2.2]) we need gives us an asymptotic of an oscillatory integral of Airy type. We shall also need some variants, but these we shall state and prove along the way when they are needed.
Lemma 3.1
For \(\lambda \geqslant 1\) and \(u \in {\mathbb {R}}\), \(|u| \lesssim 1\), let us consider the integral
where a, b are smooth and real-valued functions on an open neighbourhood of \(I \times K\) for I a compact neighbourhood of the origin in \({\mathbb {R}}\) and K a compact subset of \({\mathbb {R}}^m\). Let us assume that \(b(t,s) \ne 0\) on \(I \times K\) and that \(|t| \leqslant \varepsilon \) on the support of a. If \(\varepsilon > 0\) is chosen sufficiently small and \(\lambda \) sufficiently large, then the following holds true:
-
(a)
If \(\lambda ^{2/3} |u| \lesssim 1\), then we can write
$$\begin{aligned} J(\lambda ,u,s) = \lambda ^{-1/3} g\left( \lambda ^{2/3}u, \lambda ^{-1/3}, s\right) , \end{aligned}$$where \(g(v, \mu , s)\) is a smooth function of \((v,\mu ,s)\) on its natural domain.
-
(b)
If \(\lambda ^{2/3} |u| \gg 1\), then we can write
$$\begin{aligned} J(\lambda ,u,s) =&\,\lambda ^{-1/2} |u|^{-1/4} \chi _0(u/\varepsilon ) \, \sum _{\tau \in \{+,-\}} a_\tau (|u|^{1/2},s; \lambda |u|^{3/2}) e^{i \lambda |u|^{3/2} q_\tau (|u|^{1/2},s)} \\&+ (\lambda |u|)^{-1} E(\lambda |u|^{3/2}, |u|^{1/2}, s), \end{aligned}$$where \(a_{\pm }\) are smooth functions in \((|u|^{1/2},s)\) and classical symbolsFootnote 3 of order 0 in \(\lambda |u|^{3/2}\), and where \(q_\pm \) are smooth functions such that \(|q_\pm | \sim 1\). The function E is a smooth function satisfying
$$\begin{aligned} \left| \partial ^\alpha _\mu \partial ^\beta _v \partial ^\gamma _s E(\mu , v, s)\right| \leqslant C_{N,\alpha ,\beta ,\gamma } |\mu |^{-N}, \end{aligned}$$for all \(N, \alpha , \beta , \gamma \in {\mathbb {N}}_0\).
The proof is the same as in [16], up to obvious modifications.
Next, we state results relating the Newton polyhedron and its associated quantities with asymptotics of oscillatory integrals.
Theorem 3.2
Let \(\phi : \Omega \rightarrow {\mathbb {R}}\) be a smooth function of finite type defined on an open set \(\Omega \subset {\mathbb {R}}^2\) containing the origin. If \(\Omega \) is a sufficiently small neighbourhood of the origin and \(\eta \in C_c^\infty (\Omega )\), then
for all \(\xi \in {\mathbb {R}}^3\).
This result was proven in [15] and can be interpreted as a uniform estimate with respect to a linear pertubation of the phase. The case when \(h(\phi ) < 2\) was considered earlier in [6]. In the case when \(\phi \) is real analytic and there is no pertubation (i.e., \(\xi _1=\xi _2=0\)) the above result goes back to Varchenko [32]. In the case of a real analytic function \(\phi \) one actually has a uniform estimate with respect to analytic pertubations (this was proved by Karpushkin [18]).
We also have the following result from [15] which gives us sharpness of Theorem 3.2 in the case when \(\xi _1=\xi _2=0\).
Theorem 3.3
Let \(\phi \) be as in Theorem 3.2 and let us define for \(\lambda > 0\) the function
for an \(\eta \in C_c^\infty (\Omega )\). If the principal face \(\pi (\phi ^a)\) of \({\mathcal {N}}(\phi ^a)\) is a compact face, and if \(\Omega \) is a sufficiently small neighbourhood of the origin, then
where \(c_{\pm }\) are nonzero constants depending on the phase \(\phi \) only.
An analogous result was proved earlier by Greenblatt in [10] for real analytic phase functions \(\phi \). When the principal face is not compact, Theorem 3.3 may fail in general (for an example of this see [17]).
Finally, we state three lemmas which we shall often use in conjunction with Stein’s complex interpolation theorem. The proofs of the first and the third lemma can be found in [16, Section 2.5], while we only give a brief note on the proof of the second lemma since it is a direct modification of the first one. The proof of all of them are elementary, though the proof of the third one is quite technical.
Lemma 3.4
Let \(Q = \prod _{k=1}^n[-R_k,R_k]\) be a compact cuboid in \({\mathbb {R}}^n\) for some real numbers \(R_k > 0\), \(k = 1,\ldots ,n\), and let \(\alpha ,\beta ^1,\ldots ,\beta ^n\) be some fixed nonzero real numbers. For a \(C^1\) function H defined on an open neighbourhood of Q, nonzero real numbers \(a_1, \ldots , a_n\), and M a positive integer we define
for \(t \in {\mathbb {R}}\). Then there is a constant C which depends only on Q and the numbers \(\alpha \) and \(\beta ^k\)’s, but not on H, \(a_k\)’s, M, and t, such that
for all \(t \in {\mathbb {R}}\).
We shall often use this lemma in combination with the holomorphic function
when applying complex interpolation. This function has the property that \(| \gamma (1+it) F(t) | \leqslant C_\theta \) for a positive constant \(C_\theta < +\infty \), and \(\gamma (\theta ) = 1\).
The following lemma is a slight variation of what was written in [16, Remark 2.8].
Lemma 3.5
Let \(Q = \prod _{k=1}^n[-R_k,R_k]\) be a compact cuboid in \({\mathbb {R}}^n\) for some real numbers \(R_k > 0\), \(k = 1,\ldots ,n\), let \(\alpha ,\beta ^1,\ldots ,\beta ^n\) be some fixed nonzero real numbers, and let \(0< \epsilon < 1\). For a \(C^1\) function H on a neighbourhood of Q, nonzero real numbers \(a_1, \ldots , a_n\), and M a positive integer we define
for \(t \in {\mathbb {R}}\). Then there is a constant C which depends only on Q and the numbers \(\alpha \), \(\beta ^k\)’s, and \(\epsilon \), but not on H, \(a_k\)’s, M, and t, such that
for all \(t \in {\mathbb {R}}\). The constants \(C_k\) are given as
where the supremum goes over the set \(\prod _{j=1}^k[-R_j,R_j]\).
The only difference compared to the proof of [16, Lemma 2.7] is that one now writes
and notes that the fractions are bounded by their respective \(C_k\)’s.
In the above lemma we could have directly defined \(C_k\)’s as the Hölder quotients appearing in (3.2), but the formulas used in Lemma 3.5 turn out to be more practical. One can easily construct an example though where using the Hölder quotients is more appropriate. One example is when one has an oscillatory factor such as in \(H(y_1) = y_1^\epsilon \, e^{i y_1^{-1}}\), \(0< y_1 < 1\) (cf. the Riemann singularity as in [28, Chapter VIII, Subsection 1.4.2]). This function is \(\epsilon \)-Hölder continuous at 0 and satisfies the conclusion of Lemma 3.5 in the sense that \(|F(t)| \leqslant C/|2^{i\alpha t} - 1|\), but one can show without too much effort that the integral defining \(C_1\) in Lemma 3.5 is infinite.
The third lemma is a two parameter version of the first one.
Lemma 3.6
Let \(Q = \prod _{k=1}^n[-R_k,R_k]\) be a compact cuboid in \({\mathbb {R}}^n\) for some real numbers \(R_k > 0\), \(k = 1,\ldots ,n\), and let \(\alpha _1,\alpha _2 \in {\mathbb {Q}}^{\times }\), and \(\beta ^k_1, \beta ^k_2 \in {\mathbb {Q}}\), \(k = 1,\ldots ,n\), be fixed numbers such that \(\alpha _1 \beta _2^k - \alpha _2 \beta _1^k \ne 0\) for all k (i.e., the vector \((\alpha _1, \alpha _2)\) is linearly independent from \((\beta _1^k, \beta _2^k)\)). For a \(C^2\) function H defined on an open neighbourhood of Q, nonzero real numbers \(a_1, \ldots , a_n\), and \(M_1, M_2\) positive integers we define
for \(t \in {\mathbb {R}}\). Then there is a constant C which depends only on Q and the numbers \(\alpha _1, \alpha _2\), \(\beta _1^k\)’s, \(\beta _2^k\)’s, but not on H, \(a_k\)’s, \(M_1\), \(M_2\), and t, such that
for all \(t \in {\mathbb {R}}\). The function \(\rho \) is defined by \(\rho (t) :=\prod _{\nu = 1}^N {\tilde{\rho }}(\nu t) {\tilde{\rho }}(-\nu t)\), where
and N is a positive integer depending on the \(\beta _1^k\)’s and \(\beta _2^k\)’s.
For future reference we also note the following construction from [16, Remark 2.10] of a complex function \(\gamma \) on the strip \(\Sigma :=\{\zeta \in {\mathbb {C}}: 0 \leqslant {\text {Re}}\zeta \leqslant 1\}\) which shall be used in the context of complex interpolation together with the above two parameter lemma. If we are given \(0< \theta < 1\) and the exponents \(\alpha _1, \alpha _2\), and \(\beta _1^k\)’s, \(\beta _2^k\)’s as above, we define
where
The function \(\gamma \) has the following two key properties. It is an entire analytic function uniformly bounded on the strip \(\Sigma \), and for the function F as in Lemma 3.6 there is a positive constant \(C_\theta < +\infty \) such that for all \(t \in {\mathbb {R}}\) we have \(| \gamma (1+it) F(t) | \leqslant C_\theta \). It also has the property that \(\gamma (\theta ) = 1\).
3.3 Auxiliary results related to mixed \(L^p\)-norms
In this section R shall denote the Fourier restriction operator \(L^p({\mathbb {R}}^3) \rightarrow L^2(\mathrm {d}\mu )\) for a positive finite Radon measure \(\mu \), and all functions and measures will have \({\mathbb {R}}^3\) as their domain, unless stated otherwise. Recall that we assume \(p = (p_1,p_3)\).
We first recall what happens in the simple case when \(p=(2,1)\) and \(\mu \) has the form
where \(\phi \) is any measurable function on an open set \(\Omega \) and \(\eta \in C_c^\infty (\Omega )\) is a nonnegative function. In this case the form of the adjoint of R is
and it is called the extension operator. Using Plancherel for each fixed \(x_3\), we easily get boundedness of \(R^* : L^2(\mathrm {d}\mu ) \rightarrow L^\infty _{x_3}(L^2_{(x_1,x_2)})\). Note that the operator bound depends only on the \(L^\infty \) norm of \(\eta \). In particular we know that \(R : L^1_{x_3}(L^2_{(x_1,x_2)}) \rightarrow L^2(\mathrm {d}\mu )\) is bounded.
When considering the \(L^p-L^2\) Fourier restriction problem for other p’s, it is advantageous to reframe the problem using the so called “\(R^* R\)” method. The boundedness of the restriction operator \(R : L^p \rightarrow L^2(\mathrm {d}\mu )\) is equivalent to the boundedness of the operator \(T = R^* R\), which can be written as

in the pair of spaces \(L^p \rightarrow L^{p'}\), where \(p'\) denotes the Young conjugate exponents \((p_1',p_3')\). Note that the operator T is linear in \(\mu \) and it even makes sense for a complex \(\mu \) (unlike the restriction operator R). This enables us to decompose the measure \(\mu \) into a sum of complex measures, each having an associated operator of the same form as in (3.4).
The following few lemmas give us information on the boundedness of convolution operators such as in (3.4).
Lemma 3.7
Let us consider the convolution operator \(T : f \mapsto f * {\widehat{\mu }}\) for a tempered Radon measure \(\mu \) (i.e., a Radon measure which is a tempered distribution).
-
(i)
If \({\widehat{\mu }}\) is a measurable function which satisfies
$$\begin{aligned} |{\widehat{\mu }}(x_1,x_2,x_3)| \lesssim A (1+|x_3|)^{-{\tilde{\sigma }}} \end{aligned}$$(3.5)for some \({\tilde{\sigma }} \in [0,1)\), then the operator norm of \(T : L^p \rightarrow L^{p'}\) for \((1/p_1',1/p_3') = (0,{\tilde{\sigma }}/2)\) is bounded (up to a multiplicative constant) by A.
-
(ii)
If \(\mu \) is a bounded function such that \(\Vert \mu \Vert _{L^\infty } \lesssim B\), then the operator norm of \(T : L^2 \rightarrow L^{2}\) is bounded (up to a multiplicative constant) by B.
Proof
One can easily show by integrating (3.4) in \((x_1,x_2)\) variables that
and therefore we can now apply the (one-dimensional) Hardy-Littlewood-Sobolev inequality and obtain the claim in the first case. The second case when \(p_1=p_3=2\) is a well known classical result for multipliers. \(\square \)
For a more abstract approach to the above lemma see [9, 20]. There one also obtains an appropriate result for \({\tilde{\sigma }} = 1\) when \(1/p_1' > 0\), but shall not need this.
A particular useful application of the above lemma is the following.
Lemma 3.8
Let us consider \(T : f \mapsto f * {\widehat{\mu }}\) for a tempered Radon measure \(\mu \) which is now localised in the frequency space \({{\,\mathrm{supp}\,}}{\widehat{\mu }} \subset {\mathbb {R}}^2 \times [-\lambda _3,\lambda _3]\) for a \(\lambda _3 \gtrsim 1\). Let us assume that \(\mu \) and \({\widehat{\mu }}\) are measurable functions satisfying
Then T is a bounded operator for \((\frac{1}{p_1'},\frac{1}{p_3'}) = (0,\frac{{\tilde{\sigma }}}{2})\) for all \({\tilde{\sigma }} \in [0,1)\), with the associated operator norm being at most (up to a multiplicative constant) \(A \, \lambda _3^{{\tilde{\sigma }}}\). The operator norm of \(T : L^2 \rightarrow L^{2}\) is bounded (up to a multiplicative constant) by B.
Proof
We only need to obtain the decay estimate (3.5). We note that since \({\widehat{\mu }}\) has \(x_3\) support bounded by \(\lambda _3\), it follows
for all \({\tilde{\sigma }} \in [0,1)\). \(\square \)
At the end of this section we note the following simple result which tells us that the conclusion of Lemma 3.7 is in a sense quite sharp. We remark that the last conclusion in the lemma below is consistent with the condition \({\tilde{\sigma }}<1\) in (3.5).
Lemma 3.9
Consider the convolution operator \(T : f \mapsto f * {\widehat{\mu }}\) for a tempered Radon measure \(\mu \) whose Fourier transform \({\widehat{\mu }}\) is continuous. Let \(\varphi : [0,+\infty ) \rightarrow (0,+\infty )\) be an increasing and unbounded continuous function and assume that at least one of the limits
exists for some \({\tilde{\sigma }} \in (0,1)\), with the limiting value being a nonzero number. Then \(T : L^p \rightarrow L^{p'}\) is not a bounded operator for \((1/p_1',1/p_3') = (0,{\tilde{\sigma }}/2)\). The conclusion also holds in the case when \(\varphi \) is the constant function 1, \({\tilde{\sigma }} = 1\), and if we additionally assume that \({\widehat{\mu }}\) is an \(L^\infty ({\mathbb {R}}^3)\) function and that both of the above limits exist and are equal, with the limiting value being a nonzero number.
Proof
Let us begin the proof by assuming that the operator \(T : L^{\frac{2}{2-{\tilde{\sigma }}}}_{x_3} (L^1_{(x_1,x_2)}) \rightarrow L^{2/{\tilde{\sigma }}}_{x_3} (L^\infty _{(x_1,x_2)})\) is bounded. Since \({\widehat{\mu }}\) is continuous, without loss of generality we can assume that
for all x in the open set U of the form \(\{ x \in {\mathbb {R}}^3 : x_3 > K, |(x_1,x_2)| < \epsilon _U(x_3)\}\), where \(K > 0\) and \(\epsilon _U\) is a continuous and strictly positive function on \({\mathbb {R}}\).
Now consider the function
where \(\chi _0\) is smooth, identically 1 in the interval \([-1,1]\), and supported within the interval \([-2,2]\). Then
and if we assume \(\varepsilon \) to be sufficiently small and M sufficiently large, one obtains by a simple calculation that
for all \(x_3\) such that \(4M< x_3 < C(M, \varepsilon )\), where \(C(M, \varepsilon ) \rightarrow \infty \) when \(\varepsilon \rightarrow 0\) and M is fixed. If in addition we know say \(x_3 \leqslant 5M < C(M, \varepsilon )\), then
and the lower bound on the norm is
But now by the boundedness assumption we obtain
i.e., \(\varphi (|M|) \lesssim 1\). This is impossible in general since we can take \(M \rightarrow \infty \).
In the case when the limits are equal, \({\tilde{\sigma }} = 1\), and \(\varphi \) is the constant function 1, we redefine U as the set \(\{ x \in {\mathbb {R}}^3 : |x_3| > K, |(x_1,x_2)| < \epsilon _U(x_3)\}\) after which we can take (3.7) to be true for \(x \in U\) too. If we use the same f as above, then for any \(x_3 \in [-M/2,M/2]\) we easily obtain from the definition of T that
for an M sufficiently large and \(\varepsilon \) sufficiently small. Thus the norm \(\Vert Tf \Vert _{L^{2}_{x_3} (L^\infty _{(x_1,x_2)})}\) is bounded below by \(M^{1/2} \ln M\), while \(\Vert f\Vert _{L^{2}_{x_3} (L^1_{(x_1,x_2)})}\) is of size \(M^{1/2}\). This is impossible if T is bounded. \(\square \)
In the case \({\tilde{\sigma }} = 1\) and when \(\varphi \) is identically equal to a nonzero constant the above proof does not work if the limits have the same absolute value but opposite signs. This is related to the fact that an operator given as a convolution against \(x \mapsto x/(1+x^2)\) is bounded \(L^2({\mathbb {R}}) \rightarrow L^2({\mathbb {R}})\) since the Fourier transform of \(x \mapsto x/(1+x^2)\) is up to a constant \(\xi \mapsto e^{-|\xi |} {{\,\mathrm{sgn}\,}}\xi \).
4 The adapted case and reduction to restriction estimates near the principal root jet
Here we mimic [16, Chapter 3] and the last section of [15], where the adapted case for \(p_1=p_3\) was considered. In this section we shall be concerned with measures of the form
where \(\phi (0) = 0\), \(\nabla \phi (0) = 0\), and \(\eta \) is a smooth nonnegative function with support contained in a sufficiently small neighbourhood of 0. We assume that \(\phi \) is of finite type on the support of \(\eta \). The associated Fourier restriction problem is
for any \(\eta \) with support contained in a sufficiently small neighbourhood of 0.
The following proposition will be useful in this section.
Proposition 4.1
Let \(\mu \), \(\phi \), and \(\eta \) be as above. Then the mixed norm Fourier restriction estimate (4.2) holds true for the point \((1/p_1',1/p_3') = (1/2,0)\). Furthermore we have the following two cases.
-
(i)
If either \(h(\phi ) = 1\) or \(\nu (\phi ) = 1\), then the estimate (4.2) holds true for \(1/p_1' = 0\) and \(1/p_3' <1/(2h(\phi ))\). In this case the estimate for \((1/p_1',1/p_3') = (0,1/(2h(\phi )))\) does not hold if \(\eta (0) \ne 0\).
-
(ii)
If \(h(\phi )>1\) and \(\nu (\phi )=0\), then the estimate (4.2) holds true for \((1/p_1',1/p_3') = (0,1/(2h(\phi )))\).
Proof
The claim for \((1/p_1',1/p_3') = (1/2,0)\) follows from considerations at the beginning of Sect. 3.3.
Let us now recall what happens in the non-degenerate case, i.e., when the determinant of the Hessian \(\det {\mathcal {H}}_\phi (0,0) \ne 0\). This is equivalent to \(h(\phi ) = 1\) and in this case \(\phi \) is adapted in any coordinate system. Here we have the bound (4.2) for all of the \((1/p_1',1/p_3')\) given in the necessary condition (2.5), except for the point (0, 1/2), for which it does not hold. This fact is actually true globally, i.e., the Strichartz estimates hold (see [9, 20] and references therein) in the same range, and one can easily convince oneself that the same proof as in say [20] goes through in our local case. For the negative results at the point (0, 1/2) in the case of Strichartz estimates see [19] and [23]. We can also get a negative result at the point (0, 1/2) directly in our case by applying Lemma 3.9 for the case \({\tilde{\sigma }} = 1\) and \(\varphi \) is identically equal to 1. The limits in Lemma 3.9 are obtained by a simple application of the two dimensional stationary phase method. Furthermore, since the Hessian does not change its sign when changing the phase \(\phi \mapsto -\phi \), the limits in both directions are equal.
The claims for the case when \(h(\phi ) > 1\) follow easily by applying Theorems 3.2 and 3.3 to Lemmas 3.7 and 3.9 respectively. In Lemma 3.9 we take \(\varphi \) to be the logarithmic function \(x \mapsto \log (2+x)\). \(\square \)
4.1 The adapted case
The following proposition tells us precisely when the Fourier restriction estimate holds in the adapted case.
Proposition 4.2
Let us assume that \(\mu \), \(\phi \), and \(\eta \) are as explained at the beginning of this section, and let us assume that \(\phi \) is adapted.
-
(i)
If \(h(\phi )=1\) or \(\nu (\phi )=1\), then the full range Fourier restriction estimate given by the necessary condition (2.5) holds true, except for the point \((1/p_1',1/p_3') = (0,1/(2h(\phi )))\) where it is false if \(\eta (0) \ne 0\).
-
(ii)
If \(h(\phi )>1\) and \(\nu (\phi )=0\), then the full range Fourier restriction estimate given by the necessary condition (2.5) holds true, including the point \((1/p_1',1/p_3') = (0,1/(2h(\phi )))\).
Proof
The case when \(h(\phi ) = 1\) is the classical known case and it was already discussed in the proof of Proposition 4.1. The case when \(h(\phi ) > 1\) and \(\nu (\phi ) = 0\) follows from Proposition 4.1 by interpolation.
Let us now consider the remaining case when \(h(\phi ) > 1\) and \(\nu (\phi ) = 1\). Then if we would use Proposition 4.1 and interpolation as in the previous case, we would miss all the boundary points determined by the line of the necessary condition (2.5) except the point (1/2, 0) where we know that the estimate always holds. Recall that this is essentially because we have the logarithmic factor in the decay of the Fourier transform of \(\mu \). Instead, one can use the strategy from [15, Section 4] to avoid this problem. We only briefly sketch the argument. One decomposes
where \(\mu _k\) are supported within ellipsoid annuli centered at 0 and closing in to 0. This is done by considering the partition of unity
where \(\chi \) is an appropriate \(C_c^\infty ({\mathbb {R}}^2)\) function supported away from the origin and
where \(\kappa = (\kappa _1, \kappa _2)\) is the weight associated to the principal face of \({\mathcal {N}}(\phi )\). Next, one rescales the measures \(\mu _k\) and obtains measures \(\mu _{0,(k)}\) having the form (4.1). These new measures have uniformly bounded total variation and Fourier decay estimate with constants uniform in k:
Note that there is no logarithmic factor anymore. Now we can use Proposition 4.1 and interpolation to obtain the mixed norm Fourier restriction estimate within the range (2.5) for each \(\mu _{0,(k)}\). As in [15, Section 4], one now easily obtains the boundFootnote 4
where \(\delta ^e_{r}(x_1,x_2,x_3) = (r^{\kappa _1}x_1,r^{\kappa _2}x_2,rx_3)\). The scaling in our mixed norm case is
and therefore
by the necessary condition \(1/p'_1 + 1/(|\kappa |p'_3) \leqslant 1/2\), and the equalities \(d(\phi ) |\kappa | = h(\phi ) |\kappa | = 1\). The rest of the proof is the same as in [15] if we assume \(p_1 > 1\), since then one can use the Littlewood-Paley theoremFootnote 5 and the Minkowski inequality (which we can apply since \(p_1=p_2\leqslant 2\) and \(p_3\leqslant 2\)) to sum the above inequality in k. The proof of Proposition 4.2 is done. \(\square \)
4.2 Reduction to the principal root jet
In this section we make some preliminary reductions for the case when \(\phi \) is not adapted. Recall that we may assume that \(\phi \) is linearly adapted and that we denote by \(\psi \) the principal root of \(\phi \). Then we can obtain the adapted coordinates y (after possibly interchanging the coordinates \(x_1\) and \(x_2\)) through \((y_1,y_2) = (x_1, x_2-\psi (x_1))\). Before stating the last proposition of this section (analogous to [16, Proposition 3.1]) let us recall some notation from [16]. We write
where \(b_1 \ne 0\) and \(m \geqslant 2\) by linear adaptedness (see [16, Proposition 1.7]). If F is an integrable function on the domain of \(\eta \), say \(\Omega \subseteq {\mathbb {R}}^2\), then we denote
If \(\chi _0\) denotes a \(C_c^\infty ({\mathbb {R}})\) function equal to 1 in a neighbourhood of the origin, we may define
where \(\varepsilon \) is an arbitrarily small parameter. The domain of \(\rho _1\) is a \(\kappa \)-homogeneous subset of \(\Omega \) which contains the principal root jet \(x_2 = \psi (x_1)\) of \(\phi \) when \(\Omega \) is contained in a sufficiently small neighbourhood of 0.
Proposition 4.3
Assume \(\phi \) is of finite type on \(\Omega \), non-adapted, and linearly adapted (i.e., \(d(\phi ) = h_{\text {lin}}(\phi )\)). Let \(\varepsilon > 0\) be sufficiently small and let \(\mu ^{1-\rho _1}\) have support contained in a sufficiently small neighbourhood of 0. Then the mixed norm Fourier restriction estimate (4.2) with respect to the measure \(\mu ^{1-\rho _1}\) holds true for all \((1/p_1',1/p_3')\) which satisfy
i.e., within the range determined by the necessary condition associated to the principal face of \({\mathcal {N}}(\phi )\), except maybe the boundary points of the form \((0,1/p_3')\). In particular, it also holds true within the narrower range determined by all of the necessary conditions, excluding maybe the boundary points of the form \((0,1/p_3')\).
We just briefly mention that the proof of the Proposition 4.3 is trivial as soon as one uses the results from [16, Chapter 3]. Analogously to the previous section, one decomposes the measure \(\mu ^{1-\rho _1}\) by using the \(\kappa \) dilations associated to the principal face of \({\mathcal {N}}(\phi )\). The measures \(\nu _k\) obtained by rescaling are of the form (4.1), have uniformly bounded total variation, and have the Fourier transform decay (with constants uniform in k)
All of this was proven in [16, Chapter 3]. Therefore we have the Fourier restriction estimate for each \(\nu _k\) for the points \((1/p_1',1/p_3') = (1/2,0)\) and \((1/p_1',1/p_3') = (0,1/(2d(\phi )))\). Now one uses again interpolation, the Minkowski inequality, and the Littlewood-Paley theorem, to obtain the claim.
Note that the estimates for the boundary points of the form \((0,1/p_3')\) can be directly solved for the original measure \(\mu \) through Proposition 4.1.
5 The case \(h_{\text {lin}}(\phi ) < 2\)
In the remainder of this article we shall be concerned with the proof of:
Theorem 5.1
Let \(\phi : {\mathbb {R}}^2 \rightarrow {\mathbb {R}}\) be a smooth function of finite type defined on a sufficiently small neighbourhood \(\Omega \) of the origin, satisfying \(\phi (0) = 0\) and \(\nabla \phi (0) = 0\). Let us assume that \(\phi \) is linearly adapted, but not adapted, and that \(h_{\text {lin}}(\phi ) < 2\). We additionally assume that the following holds: Whenever the function \(b_0\) appearing in (2.8), (2.9), (2.10) is flat (i.e., when \(\phi \) is \(A_\infty \) or \(D_\infty \) type singularity), then it is necessarily identically equal to 0. In this case, for all smooth \(\eta \geqslant 0\) with support in a sufficiently small neighbourhood of the origin the Fourier restriction estimate (4.2) holds for all p given by the necessary conditions determined in Sect. 2.4.
The above condition on the function \(b_0\) is implied by the Condition (R) from [16] (see [16, Remark 2.12. (c)]).
We begin with some preliminaries. As one can see from the Newton diagrams in Sect. 2.4, the assumption in our case \(h_{\text {lin}}(\phi ) < 2\) implies that \(h(\phi ) \leqslant 2\). Additionally, we see that \(h(\phi ) = 2\) implies that we either have \(A_\infty \) or \(D_\infty \) type singularity. As mentioned in Sect. 1.1, the Varchenko exponent is 0, i.e., \(\nu (\phi ) = 0\), if \(h(\phi ) < 2\). When \(h(\phi ) = 2\) the equality \(\nu (\phi ) = 0\) also holds true in our case since the principal faces are non-compact. We conclude that if \(h_{\text {lin}}(\phi ) < 2\), then by Proposition 4.1 we have the mixed norm Fourier restriction estimate (4.2) for both of the points \((1/p_1',1/p_3') = (1/2,0)\) and \((1/p_1',1/p_3') = (0,1/(2h(\phi )))\). Therefore, according to Sect. 2.4, by interpolation it remains to prove the estimate (4.2) for the respective critical exponents given by
where \(m \geqslant 2\) is the principal exponent of \(\psi \) from Sect. 2.4.
Recall that according to Proposition 4.3 we may concentrate on the piece of the measure \(\mu \) located near the principal root jet:
where
for an arbitrarily small \(\varepsilon \) and \(\omega (0) x_1^m\) the first term in the Taylor expansion of
where \(\omega \) is a smooth function such that \(\omega (0) \ne 0\).
As we use the same decompositions of the measure \(\mu ^{\rho _1}\) as in [16], we shall only briefly outline the decomposition procedure.
5.1 Basic estimates
Before we outline the further decompositions and rescalings of \(\mu ^{\rho _1}\), we first describe here the general strategy for proving the Fourier restriction estimates for the pieces obtained through these decompositions. All of the pieces \(\nu \) of the measure \(\mu ^{\rho _1}\) will essentially be of the form
where \(\Phi \) is a phase function and \(a \geqslant 0\) an amplitude. The amplitude will usually be compactly supported with support away from the origin. Both \(\Phi \) and a will depend on various decomposition related parameters. We shall need to prove the Fourier restriction estimate with respect to these measures with estimates being uniform in a certain sense with respect to the appearing decomposition parameters.
At this point one uses the “\(R^* R\)” method applied to the measure \(\nu \). The resulting operator is \(T_\nu \) which acts by convolution against the Fourier transform of \(\nu \). Now one considers the spectral decomposition \((\nu ^\lambda )_\lambda \) of the measure \(\nu \) so that each functions \(\nu ^\lambda \) is localised in the frequency space at \(\lambda = (\lambda _1, \lambda _2, \lambda _3)\), where \(\lambda _i \geqslant 1\) are dyadic numbers for \(i=1, 2, 3\). For such functions \(\nu _\lambda \) we shall obtain bounds of the form (3.6). By Lemma 3.8 then we have the bounds on their associated convolution operators \(T^\lambda _\nu \):
for all \({\tilde{\sigma }} \in [0,1)\). A and B shall again depend on various decomposition related parameters. If we now define
then interpolating (5.3) (\(\theta \) being the interpolation coefficient) we get precisely the estimate for the critical exponent in (5.1) with the bound
Now it remains to sum over \(\lambda \).
When \(\theta < 1/4\), we shall be able to always sum absolutely. In the cases when \(\theta = 1/4\) and particularly \(\theta = 1/3\) (note that both appear only in A type singularity with \(m = 3\) and \(m = 2\) respectively) we shall need the complex interpolation method developed in [16].
5.2 First decompositions and rescalings of \(\mu ^{\rho _1}\)
As in Sect. 4, we use the \(\kappa \) dilatations associated to the principal face of \({\mathcal {N}}(\phi )\), and subsequently a Littlewood-Paley argument. Then it remains to prove the Fourier restriction estimate for the renormalised measures \(\nu _k\) of the form
uniformly in k. As was shown in [16, Section 4.1], the function \(\phi (x,\delta )\) has the form
where \(\delta = (\delta _1,\delta _2,\delta _3) :=(2^{-\kappa _1 k}, 2^{-\kappa _2 k}, 2^{-(n\kappa _1-1)k})\), and
Above the functions b, \(b_1\), \(b_2\), \(\beta \), and the quantity n are as in Sect. 2.4. Recall that \(m = \kappa _2/\kappa _1 \geqslant 2\) and so \(\delta _2 = \delta _1^m\). The amplitude \(a(x,\delta ) \geqslant 0\) is a smooth function of \((x,\delta )\) supported at
Furthermore, due to the \(\rho _1\) cutoff function, which has a \(\kappa \)-homogeneous domain, we may assume \(|x_2 - x_1^m \omega (0)| \ll 1\).
Since we can take k arbitrarily large, the parameter \(\delta \) approaches 0. This implies that on the domain of integration of a we have that \({\tilde{b}}(x_1,x_2,\delta _1,\delta _2)\) converges as a function of \((x_1,x_2)\) to b(0, 0) (resp. \(b_1(0,0)x_1\)) in \(C^\infty \) when \(k \rightarrow \infty \) and \(\phi \) has A type singularity (resp. D type singularity). The amplitude \(a(x,\delta )\) converges in \(C_c^\infty \) to a(x, 0). We also recall that according to the assumption in Theorem 5.1, we may assume that \(\delta _3 = 0\) if “\(n = \infty \)”, i.e., if \(b_0\) is flat in the normal form of \(\phi \).
The next step is to decompose the (compactly) supported amplitude a into finitely many parts, each localised near a point \(v=(v_1,v_2)\) for which we may assume that it satisfies \(v_2 = v_1^m \omega (0)\) (by compactness and since in (5.2) we can take \(\varepsilon \) arbitrarily small). The newly obtained measures we denote by \(\nu _\delta \) and their new amplitudes by the same symbol \(a(x,\delta ) \geqslant 0\):
where now the support of \(a(\cdot ,\delta )\) is contained in the set \(|x-v| \ll 1\).
Since we can use Littlewood-Paley decompositions in the mixed norm case (see [22, Theorem 2], and also [1, 8]), we can now decompose the measure \(\nu _\delta \) in the \(x_3\) direction in the same way as in [16, Section 4.1]. This is achieved by using the cutoff functions \(\chi _1(2^{2j}\phi (x,\delta ))\) in order to localise near the part where \(|\phi (x,\delta )| \sim 2^{-2j}\). Then it remains to prove the mixed norm estimate (4.2) for measures \(\nu _{\delta ,j}\) with bounds uniform in paramteres \(j \in {\mathbb {N}}\) and \(\delta = (\delta _1,\delta _2,\delta _3) \in {\mathbb {R}}^3\), \(\delta _i \geqslant 0\), \(i = 1,2,3\), where the measures \(\nu _{\delta ,j}\) are defined through
where j can be taken sufficiently large and \(\delta \) sufficiently small. The function \(2^{2j}\phi (x,\delta )\) can be written as
Following [16], we distinguish three cases: \(2^{2j} \delta _3 \ll 1\), \(2^{2j} \delta _3 \gg 1\), and the most involed \(2^{2j} \delta _3 \sim 1\).
5.3 The case \(2^{2j} \delta _3 \gg 1\)
As was done in [16, Subsection 4.1.1], we change coordinates from \((x_1,x_2)\) to \((x_1, 2^{2j} \phi (x,\delta ))\) and subsequently perform a rescaling (which we adjust to our mixed norm case). Then one obtains that the mixed norm Fourier restriction for \(\nu _{\delta , j}\) is equivalent to the estimate
where \({\tilde{\nu }}_{\delta ,j}\) is the rescaled measure
The function \(a(x, \delta , j)\) has in \(\delta \) and j uniformly bounded \(C^l\) norms for an arbitrarily large \(l \geqslant 0\), and the phase function is given by
where \(x_1\sim 1\), \(x_2\sim 1\), and without loss of generality we may assume \({\tilde{b}}_1(x_1,x_2,0,0) \sim 1\) and \({\tilde{\beta }}(0) \sim 1\); for details see [16, Subsection 4.1.1]. There the phase function \(\phi (x, \delta , j)\) was obtained by solving the equation
in \(y_2\) after substituting \(x_1 = y_1\) and \(x_2 = 2^{2j} \phi (y,\delta )\).
By using the implicit function theorem one can show that when \(\delta \rightarrow 0\), then we have the following \(C^\infty \) convergence in the \((x_1,x_2)\) variables:
In both the A and D type singularity cases we see that \({\tilde{b}}_1\) does not depend on \(x_2\) in an essential way.
Now we proceed to perform a spectral decomposition of \({\tilde{\nu }}_{\delta , j}\), i.e., for \((\lambda _1, \lambda _2, \lambda _3)\) dyadic numbers with \(\lambda _i \geqslant 1\), \(i = 1,2,3\), we define the spectrally localised measures \(\nu _j^\lambda \) through
We slightly abuse notation in the following way. Whenever \(\lambda _i = 1\), then the appropriate factor \( \chi _1(\frac{\xi _i}{\lambda _i})\) in the above expression should be considered as a localisation to \(|\xi _i| \lesssim 1\), instead of \(|\xi _i| \sim 1\).
If we define the operators
then we formally have \({\tilde{T}}_{\delta , j} = \sum _{\lambda } T^\lambda _j\), and according to (5.9) and by applying the “\(R^*R\)” technique we need to prove
In case when we are able to obtain this estimate by summing absolutely the operator pieces \(T^\lambda _j\) we shall proceed as explained in Sect. 5.1. In this case in order to obtain the (5.3) estimates we need an \(L^\infty \) bound for \(\widehat{\nu _j^\lambda }\), which we shall get from the expression (5.12), and an \(L^\infty \) bound for \(\nu _j^\lambda \), which we shall derive next.
Using the equation (5.12) we get by Fourier inversion

Here we immediately obtain that the \(L^{\infty }\) bound on \(\nu _j^\lambda \) is up to a multiplicative constant \(\lambda _2\) by using the first and the third factor within the integral by substituting \(\lambda _1 y_1\) and \(\lambda _3 y_2\). On the other hand, one can easily verify that
and hence by substituting \(z_1 = \lambda _1 y_1, z_2 = \lambda _2 \phi (y, \delta , j)\), and utilising the first two factors within the integral, we obtain \(\Vert \nu _j^\lambda \Vert _{L^\infty } \lesssim \delta _3^{1/2} \, 2^{2j} \lambda _3\), and therefore combining these two estimates we get
It remains to estimate the Fourier side; for this we shall need to consider several cases depending on the relation between \(\lambda _1\), \(\lambda _2\), and \(\lambda _3\). Let us mention that as in [16], here we shall have no problems when absolutely summing the “diagonal” pieces where \(\lambda _1 \sim \lambda _2 \sim \delta _3^{1/2} 2^{2j} \lambda _3\). However, unlike in [16], a case appears which is not absolutely summable. This will be a recurring theme in this article.
Case 1 \(\lambda _1 \ll \lambda _2\) or \(\lambda _1 \gg \lambda _2\), and \(\lambda _3 \gg \lambda _2\). In this case we can use integration by parts in both \(x_1\) and \(x_2\) in (5.12) to obtain
for any nonnegative integer N. Therefore, after plugging this estimate and the estimate (5.15) into (5.3) and (5.6), we may sum in all three parameters \(\lambda _1\), \(\lambda _2\), and \(\lambda _3\), after which one obtains an admissible estimate for (5.13).
Case 2 \(\lambda _1 \ll \lambda _2\) or \(\lambda _1 \gg \lambda _2\), and \(\lambda _3 \lesssim \lambda _2\). Here it is sufficient to use integration by parts in \(x_1\) from which we can obtain a fast decay in \(\max \{\lambda _1, \lambda _2\}\) and hence in all \(\lambda _i\)’s. Again, after interpolating summation of operators \(T^\lambda _j\) is possible in all three parameters.
Case 3 \(\lambda _1 \sim \lambda _2\) and \(\lambda _3 \ll \delta _3^{-1/2} \, 2^{-2j} \lambda _2\). In this case we see that necessarily \(\lambda _1 \gtrsim \delta _3^{\frac{1}{2}} 2^{2j}\). Also we note that if we fix say \(\lambda _1\), then there are only finitely many dyadic numbers \(\lambda _2\) such that \(\lambda _1 \sim \lambda _2\), and therefore we essentially need to sum in only two parameters in this case. By stationary phase (and integration by parts when away from the critical point) in \(x_1\) and integration by parts in \(x_2\) we get
The better bound in (5.15) is \(\delta _3^{1/2} \, 2^{2j} \lambda _3\). Therefore (5.6) becomes in our case
and hence by summation in \(\lambda _3\) and taking \(N=1\) we get
Now we obviously get the desired result by summation over \(\lambda _1 \gtrsim \delta _3^{\frac{1}{2}} 2^{2j}\).
Case 4 \(\lambda _1 \sim \lambda _2\) and \(\lambda _3 \sim \delta _3^{-1/2} \, 2^{-2j} \lambda _2\). Here we essentially sum in only one parameter. Let us first determine the estimate in (5.6).
Subcase (a) \(1 \leqslant \lambda _1 \lesssim \delta _3^{\frac{3}{2}} 2^{4j}\). Here we have by stationary phase in \(x_1\)
Therefore by (5.6) we obtain
Subcase (b) \(\lambda _1 \gg \delta _3^{\frac{3}{2}} 2^{4j}\). In this case we have by stationary phase in \(x_1\) and subsequently by the van der Corput lemma (see [16, Lemma 2.1], (i), with \(M = 2\)) in the second
and hence
Now we sum in \(\lambda _1\) using the estimates obtained in calculations in Subcases (a) and (b):
and therefore it remains to see whether this is admissible for (5.13):
But recall that \(2^{2j} \delta _3 \gg 1\), i.e., \(\delta _3^{-1} \ll 2^{2j}\), and notice that \(0<\theta \leqslant 1/3\) implies \(0< (3-5\theta )/4 \leqslant 1-2\theta \). Hence, it is indeed admissible and we are done with this case.
Case 5 \(\lambda _1 \sim \lambda _2\) and \(\lambda _3 \gg \delta _3^{-1/2} \, 2^{-2j} \lambda _2\). Here we have by the stationary phase method in \(x_1\) and integration by parts in \(x_2\)
and the bound in (5.15) is \(\lambda _1 \sim \lambda _2\). Interpolating, we obtain (with a different N)
Now if \(\theta < 1/3\), then we can easily sum in both \(\lambda _1\) and \(\lambda _3\). Therefore, we assume in the following that \(\theta = 1/3\).
Subcase (a) \(\lambda _1 \gtrsim \delta _3^{\frac{1}{2}} 2^{2j}\). Summing here in \(\lambda _1\) between \(\delta _3^{1/2} \, 2^{2j}\) and \(\delta _3^{1/2} \, 2^{2j} \, \lambda _3\), both up to a multiplicative constant, we get
Now we may sum in \(\lambda _3\) to get the desired result.
Subcase (b) \(1 \leqslant \lambda _1 \ll \delta _3^{\frac{1}{2}} 2^{2j}\). Note that here we sum \(\lambda _3\) over all the dyadic numbers greater than or equal to 1. We can also assume that \(\lambda _1 \gg \delta _3^{\frac{1}{2}} 2^{j}\) since summation in \(\lambda _1\) in (5.16) up to \(\delta _3^{\frac{1}{2}} 2^{j}\) gives the bound \(\lambda _3^{-N+1/2} \, \log _2(\delta _3^{\frac{1}{2}} 2^{j})\) which we can sum in \(\lambda _3\) and then estimate by \(\delta _3^{\frac{1}{2}} 2^{j}\). This is admissible for (5.13).
In order to obtain the required bound in the remaining range \(\delta _3^{\frac{1}{2}} 2^{j} \ll \lambda _1 \ll \delta _3^{\frac{1}{2}} 2^{2j}\), \(1 \leqslant \lambda _3\), we need to use the complex interpolation technique developed in [16]. For simplicity we assume that \(\lambda _1 = \lambda _2\) (we can do this without losing much on generality since for a fixed \(\lambda _1\) there are only finitely many dyadic numbers \(\lambda _2\) such that \(\lambda _1 \sim \lambda _2\)).
We need to consider the following function parametrised by the complex number \(\zeta \) and the dyadic number \(\lambda _3\):
where \(\gamma (\zeta ) = 2^{-3(\zeta -1)/2} - 1\). The associated convolution operator (given by convolution against the Fourier transform of the function \(\mu _\zeta ^{\lambda _3}\)) we denote by \(T_\zeta ^{\lambda _3}\).
At this point let us mention that whenever we use complex interpolation we shall generically denote by \(\mu _\zeta \) the considered measure parametrised by the complex number \(\zeta \), sometimes with an additional superscript, as is in the current case. Similarly, the associated operator shall be denoted by \(T_\zeta \), up to possibly appearing superscripts.
For \(\zeta = 1/3\) we see that
which means, by Stein’s interpolation theorem, that it is sufficient to prove
for some \(N > 0\), with constants uniform in \(t \in {\mathbb {R}}\), and where \({\tilde{\sigma }} = 1/4\) since \(m = 2\), i.e., \(\theta = 1/3\) (see (5.4)).
The first estimate is trivial in (5.18). Namely, since \(\widehat{\nu _j^\lambda }\) have essentially disjoint supports, it follows from the formula (5.17) and the estimate on the Fourier transform of \(\nu _j^\lambda \) that \(\Vert \widehat{\mu ^{\lambda _3}_{it}} \Vert _{L^\infty } \lesssim \lambda _3^{-N}\), for any \(N \in {\mathbb {N}}\), the implicit constant depending of course on N. Now one just uses the results from Sect. 3.3 (and in particular Lemma 3.7).
In order to prove the second estimate in (5.18) we shall need to use the oscillatory sum result Lemma 3.4. It turns out that the term \((\delta _3^{-3/2}\,2^{-3j})^\zeta \) in the definition of \(\mu _\zeta ^{\lambda _3}\) is redundant, and that we can actually prove the stronger estimate
uniformly in t.
We start by substituting \(\lambda _1 y_1 \mapsto y_1\) and \(\lambda _3 y_2 \mapsto y_2\) in the expression (5.14) and plugging the obtained expression into the sum on the left hand side of (5.19):

Recall that here \(y_1 \sim \lambda _1\) and \(y_2 \sim \lambda _3\) are both positive, and that \(|\phi (\lambda ^{-1}_1 y_1, \lambda ^{-1}_3 y_2, \delta , j)| \sim 1\). Therefore we can assume \(|(x_1,x_2)| \leqslant C\) for some large constant C, since otherwise we can use the first two factors within the integral to gain a factor \(\lambda _1^{-N}\). As the dominant term in \(\phi \) is in the \(y_1\) variable and as \(\lambda _3\) is fixed, we shall only concentrate on the \(y_1\) integration and consider \(y_2/\lambda _3 \sim 1\) as a bounded parameter. Therefore the inner \(y_1\) integration, after substituting \(\lambda _1 x_1-y_1 \mapsto y_1\), becomes

where now \(x_1 - \lambda _1^{-1} y_1 \sim 1\), and therefore \(|y_1| \lesssim \lambda _1\).
Next, we can restrict ourselves, by using a smooth cutoff function, to the discussion of the integration domain where \(|y_1| \ll \lambda _1^{\varepsilon }\) for some small \(\varepsilon \), since in the other part by using the first factor in the integral we could gain a factor of \(\lambda _1^{-N\varepsilon }\). Since \(\lambda _1 \gg \delta _3^{1/2} 2^j \gg 1\) can be taken arbitrarily large, and hence \(\lambda _1^{-1} y_1\) arbitrarily small, the relation \(x_1 - \lambda _1^{-1} y_1 \sim 1\) implies \(x_1 \sim 1\). Therefore by applying a Taylor expansion to the function \(\phi (x_1-\lambda ^{-1}_1 y_1, \lambda ^{-1}_3 y_2, \delta , j)\) in the first variable, we obtain

where \(|\partial _1^N r| \sim 1\) for any \(N \geqslant 0\), and \(Q(x_1,x_2, \lambda ^{-1}_3 y_2, \delta , j) = x_2 - \phi (x_1, \lambda ^{-1}_3 y_2, \delta , j)\).
Now we note that the first two factors in the integral are essentially a convolution, and therefore, by using this two factors, one easily obtains that the bound on the integral is \(|\lambda _1 Q|^{-N}\). If \(|\lambda _1 Q| \gg 1\), \(|\lambda _1 Q|^{-N}\) is a geometric series summable in \(\lambda _1\), and if \(|\lambda _1 Q| \lesssim 1\), then we are actually within the scope of Lemma 3.4. Namely, we define the function H as

Note that H does not actually depend on \(z_3\), but we need to use it in order to implement the lower bound on \(\lambda _1\) in the summation (this is realised through the characteristic function \(\chi _Q\) in the definition of F(t) in Lemma 3.4). Tracing back, we note that all the dependencies in j are actually dependencies in \(2^{-j}\). All the parameters \((\lambda ^{-1}_3 y_2, x_1, x_2 , \delta , 2^{-j})\) are now restrained to a bounded set and the \(C^1\) norm of H in \((z_1, z_2, z_3)\) is bounded uniformly in all the (bounded) parameters if \((z_1, z_2, z_3)\) are contained in a bounded set. Therefore by taking
and applying Lemma 3.4 with \(\alpha = -3/2\), \(\lambda _1 = 2^l\), \(M = c \delta _3^{1/2}2^{2j}\) for a small \(c > 0\) determined by the implicit constant in the summation condition \(\lambda _1 \ll \delta _3^{1/2}2^{2j}\), and with
we obtain the bound (5.19). Note that the lower bound on \(\lambda _1\) in the summation in (5.19) is realised by taking \(|z_3| \ll 1\). We are done with the case \(2^{2j} \delta _3 \gg 1\).
5.4 The setting when \(2^{2j} \delta _3 \lesssim 1\)
As explained in Sect. [16, Subsection 4.2], in this case we use the change of coordinates \((x_1, x_2) \mapsto (x_1, 2^{-j}( x_2 + x_1^m \omega (\delta _1 x_1)))\) in the expression (5.8) for \(\nu _{\delta , j}\). After renormalising the measure \(\nu _{\delta , j}\) we obtain that the mixed norm Fourier restriction estimate for \(\nu _{\delta , j}\) is equivalent to
where \({\tilde{\nu }}_{\delta ,j}\) is the rescaled measure
As we see, the Fourier restriction inequality is invariant in the mixed norm case with respect to the scaling we applied. This was interestingly not the case when \(p_1=p_2=p_3\).
The function \(a(x, \delta , j)\) has the form
and the phase function is given by
where \(|{\tilde{b}}(x_1,x_2,0,0)| \sim 1\) and \(|\beta (0)| \sim 1\).
Also, we recall (see (5.7)) that when \(\delta \rightarrow 0\), then \({\tilde{b}}(x_1, x_2, \delta _1, \delta _2)\) converges in \(C^\infty \) to a nonzero constant if \(\phi \) has A type singularity, and that it converges up to a multiplicative constant to \(x_1\) if \(\phi \) has D type singularity. We shall assume without loss of generality that \({\tilde{b}}(x_1,x_2,\delta _1,\delta _2) > 0\) since one can just reflect the third coordinate of f in the expression for the measure \({\tilde{\nu }}_{\delta , j}\).
Support assumptions on \(a(\cdot , \delta )\) from Sect. 5.2 (namely, that the support is contained in a small neighbourhood of the point \((v_1,v_1^m \omega (0))\) for some \(v_1 > 0\)) imply that \(a(\cdot , \delta , j)\) is supported in a set where \(x_1 \sim 1\) and \(|x_2| \lesssim 1\).
We again perform a spectral decomposition of \({\tilde{\nu }}_{\delta , j}\), i.e., for \((\lambda _1, \lambda _2, \lambda _3)\) dyadic numbers with \(\lambda _i \geqslant 1\), \(i = 1,2,3\), we consider localised measures \(\nu _j^\lambda \) defined through
with the complete phase function \(\Phi \) being
We also introduce the operators \({\tilde{T}}_{\delta , j} f :=f * \widehat{{\tilde{\nu }}}_{\delta , j}\) and \(T^\lambda _j f :=f * \widehat{\nu ^\lambda _j}\). Then we need to prove:
In most of the cases this will be done in a similar manner as in the previous section. In the case when \(2^{2j} \delta _3 \sim 1\), \(\theta = 1/3\), and \(\lambda _1 \sim \lambda _2 \sim \lambda _3\), with which we shall deal in the next section, we shall need to perform a finer analysis.
5.5 The case \(2^{2j} \delta _3 \ll 1\)
Here we have the stronger bounds \(x_1 \sim 1\) and \(|x_2| \sim 1\) since \(\phi ^a(x,\delta ,j) \sim 1\) by (5.20) and the assumption \(2^{2j} \delta _3 \ll 1\). We also have \(|\partial _{x_2} \phi ^a(x,\delta ,j)| \sim 1\) since \(\phi ^a(x, \delta , j)\) is a small pertubation of \(b(0,0) x_2^2\) in case of A type singularity, and a small pertubation of \(b_1(0,0) x_1 x_2^2\) in case of D type singularity.
Taking the inverse transform of (5.21) we get

Similarly as in the case \(2^{2j} \delta _3 \gg 1\), we can consider either the substitution \((z_1, z_2) = (\lambda _1 y_1, \lambda _2 2^{-j} y_2)\), or the substitution \((z_1, z_2) = (\lambda _1 y_1, \lambda _3 \phi ^a(y, \delta , j))\) (in order to carry this out one needs to consider the cases \(y_2 \sim 1\) and \(y_2 \sim -1\) separately). Then one can easily obtain
Next we calculate the \(L^\infty \) bounds on the Fourier transform by using the expression (5.21).
Here we shall consider only the following case, as one can easily check that in all the other cases one gets the desired estimate (5.22) by summing absolutely.
Case \(\lambda _1 \sim \lambda _2\) and \(2^{-j}\lambda _2 \ll \lambda _3 \ll \lambda _2\). By the stationary phase method in \(x_1\) and integration by parts in \(x_2\)
and the better bound in (5.24) is \(\lambda _2\).
One is easily convinced that unless \(\theta = 1/3\), one can sum absolutely in both parameters. Henceforth we shall assume \(\theta = 1/3\) and use complex interpolation in order to deal with this case. Here we know that \(\phi \) has A type singularity and \({\tilde{\sigma }} = 1/4\). For simplicity we shall again assume that \(\lambda _1 = \lambda _2\).
We consider the following function parametrised by the complex number \(\zeta \) and the dyadic number \(\lambda _3\):
where \(\gamma (\zeta ) = 2^{-3(\zeta -1)/2} - 1\). We denote the associated convolution operator by \(T_\zeta ^{\lambda _3}\). For \(\zeta = 1/3\) we see that
Hence, by interpolation it suffices to prove
for some \(N > 0\), with constants uniform in \(t \in {\mathbb {R}}\).
The first estimate follows right away since \(\widehat{\nu _j^\lambda }\) have essentially disjoint supports, and so the \(L^\infty \) estimate for \(\widehat{\nu _j^\lambda }\) implies \(\Vert \widehat{\mu ^{\lambda _3}_{it}} \Vert _{L^\infty } \lesssim \lambda _3^{-N}\), for any \(N \in {\mathbb {N}}\).
We prove the second estimate using Lemma 3.4. We need to prove
uniformly in t.
We first use the substitution \((z_1,z_2) = (y_1,\phi ^a(y_1,y_2,\delta ,j))\) in the expression (5.23), considering the cases \(y_2 \sim 1\) and \(y_2 \sim -1\) separately. In order to solve for \((y_1,y_2)\) in terms of \((z_1,z_2)\), we introduce for a moment intermediary coordinates \(({\tilde{y}}_1, {\tilde{y}}_2) = (y_1,2^{-j}y_2+y_1^m \omega (\delta _1 y_1))\). In coordinates \(({\tilde{y}}_1, {\tilde{y}}_2)\) the expression for \(\phi ^a = z_2\) becomes
Then one can easily see that by solving for \({\tilde{y}}_2\) in terms of \((z_1,z_2)\), one gets precisely the expression (5.10) as in the case \(2^{2j} \delta _3 \gg 1\). Therefore by solving for \(y_2\) in terms of \((z_1, z_2)\) one gets
where now both \(z_1\) and \(z_2\) are positive. We shall from now on consider \(y_2\) as a function of \((z_1, z_2)\). On the limit \(j \rightarrow \infty \) and \(\delta \rightarrow 0\) the function \(y_2 = y_2(z_1,z_2,\delta ,j)\) converges to \(\pm C \sqrt{z_2}\) for some constant \(C \ne 0\) since we are in the \(\theta = 1/3\) case (i.e., A type singularity case); see (5.11).
After applying the just introduced substitution to the expression (5.23) we get

where \({\tilde{a}}_1\) is the function a multiplied by the Jacobian of the change of variables. Since \(|y_2| \sim 1\) is equivalent to \(|z_2| \sim 1\), we may rewrite again the above expression as

Now we substitute \(\lambda _1 z_1 \mapsto z_1\) and \(\lambda _3 z_2 \mapsto z_2\) in the expression (5.26), plug it into the sum (5.25), and obtain

Now we have \(z_1 \sim \lambda _1\), \(z_2 \sim \lambda _3\), and \(|y_2(\lambda ^{-1}_1 z_1, \lambda ^{-1}_3 z_2, \delta , j)| \sim 1\).
We can assume \(|(x_1, x_2)| \leqslant C\) for some large constant C, since otherwise we can use the first two factors within the integral and gain a factor of \(\lambda _1^{-N}\). Similarly as in the case \(2^{2j} \delta _3 \gg 1\) we shall consider integration in \(z_1\) only (and \(\lambda _3^{-1} z_2\) shall be a bounded parameter), and one can also use the substitution \(z_1 \mapsto \lambda _1 x_1 - z_1\) to reduce the problem to when \(|z_1| \ll \lambda _1^{\varepsilon }\) and \(x_1 \sim 1\). We also introduce \(\psi _\delta (x_1) = x_1^m \omega (\delta _1 x_1)\). Then it remains to estimate

Within the second factor in the integral we can use a Taylor approximation at \(x_1\) and obtain

where \(|\partial _1^N r| \sim 1\) for \(N \geqslant 0\) since the term \(\psi _\delta \) is dominant, and Q is a smooth function with uniform bounds. Now we notice that this form is the same as in the case \(2^{2j} \delta _3 \gg 1\) in the part where we used complex interpolation, and hence the same proof using the oscillatory sum lemma can be applied, up to obvious changes such as changing the summation bounds.
5.6 The case \(2^{2j} \delta _3 \sim 1\)
As in [16] we denote
and so \(\sigma \sim 1\) and \(|b^{\#}(x,\delta ,j)| \sim 1\). Therefore the complete phase can be rewritten as
Recall also that in this case we have the weaker conditions \(x_1 \sim 1\) and \(|x_2| \lesssim 1\) for the domain of integration in the integral in (5.21).
We furthermore slightly modify the notation in this case, as it was done in [16]. Namely, \(\delta \) shall denote in this section \((\delta _1, \delta _2)\) since \(\delta _3\) appears only in \(\sigma \). We also note that in this case there is no \(A_\infty \) nor \(D_\infty \) type singularity.
Let us introduce the notation
Then, after applying the inverse Fourier transform to (5.21), we may write

As was noted in [16, Subsection 4.2.2.], here we have the bounds
Namely, in the first factor within the integral in (5.28) we can substitute \(\lambda _1 y_1 \mapsto y_1\), and afterwards either substitute \(\lambda _2 2^{-j} y_2 \mapsto y_2\) in the second factor, or use the van der Corput lemma (see [16, Lemma 2.1], (i)) in the third factor with respect to the \(y_2\) variable.
As can easily be seen from (5.27) by using integration by parts in \(x_1\), if one of \(\lambda _1, \lambda _2\) is considerably larger than any other \(\lambda _i, i =1,2,3\), then we can easily gain a sufficiently strong estimate with which one can sum absolutely in all three parameters \(\lambda _i, i =1,2,3\), the operators \(T_j^\lambda \).
If \(\lambda _3\) is significantly larger than both \(\lambda _1\) and \(\lambda _2\) and \(\phi \) is of type A, we can also use integration by parts in \(x_1\) in order to get a sufficiently strong estimate. In the case when \(\lambda _3\) is the largest and \(\phi \) is of type D, then \(b^{\#}(x,\delta ,j)\) is approximately \(x_1\) in the \(C^\infty \) sense, and so in this case and when \(|x_2| \sim 1\), we use integration by parts in \(x_2\), and when \(|x_2| \ll 1\) integration by parts in \(x_1\). In both parts we get the bound \(\lambda _3^{-N}\) with which we can obtain a summable estimate for \(T_j^\lambda \) in all three parameters.
As it turns out, in almost all the other possible relations between \(\lambda _i\), \(i=1,2,3\), we shall need complex interpolation if \(\theta = 1/3\), or if \(\theta = 1/4\) and it is the “diagonal” case, i.e., all the \(\lambda _i\), \(i=1,2,3\), are of approximately the same size. If \(\theta = 1/3\) and \(\lambda _i\), \(i=1,2,3\), are of approximately the same size we shall actually need a finer analysis where estimates on Airy integrals are needed. This will be done in the next section.
Case 1.1. \(\lambda _1 \sim \lambda _3\), \(\lambda _2 \ll \lambda _1\), and \(\lambda _2 \leqslant 2^j \lambda _1^{1/2}\). On the part where \(|x_2| \sim 1\) we can use integration by parts in \(x_2\) and obtain much stronger estimates sufficient for absolute summation. When \(|x_2| \ll 1\) we use stationary phase in both variables, and so
If \(\theta < 1/3\) then we can sum absolutely in the usual way, and if \(\theta = 1/3\), we need to use complex interpolation for indices \(\lambda _1 \leqslant 2^{2j}\) (the other part can again be obtained by summing absolutely). When \(\theta = 1/3\) interpolation gives
and one is easily convinced that we may restrict ourselves to the case \(1 \ll \lambda _1 \ll 2^{2j}\), \(1 \ll \lambda _2 \ll \lambda _1\). The bound on the operator norm motivates us to define k through \(2^k :=\lambda _1 \lambda _2^{-1} = 2^{k_1-k_2}\), where \(2^{k_1} = \lambda _1\) and \(2^{k_2} = \lambda _2\). Our goal is to prove that for each k within the range \(1 \ll 2^k \ll 2^{2j}\) we have
since then we obtain the desired estimate by summation in k.
We shall slightly simplify the proof by assuming that \(\lambda _1 = \lambda _3\). Let us consider the following function parametrised by the complex number \(\zeta \) and the integer k:
where \(\gamma (\zeta ) = (2^{-9(\zeta -1)/4} - 1)/(2^{\frac{3}{2}}-1)\). The associated convolution operator (convolution against the Fourier transform of \(\mu _\zeta ^{k}\)) we denote by \(T_\zeta ^{k}\). It is sufficient to prove
with constants uniform in \(t \in {\mathbb {R}}\). Recall that \({\tilde{\sigma }} = 1/4\) since \(m = 2\) and \(\theta = 1/3\).
The first estimate follows right away. Namely, since \(\widehat{\nu _j^\lambda }\) have supports located at \(\lambda \), then by the estimate for the \(L^\infty \) norm of the function \(\widehat{\nu _j^\lambda }\) we have
and now one needs to recall Lemma 3.7.
We prove the second estimate by using Lemma 3.4. We need to prove
uniformly in t.
After substituting \(\lambda _1 y_1 \mapsto y_1\) and \(\lambda _1^{1/2} y_2 \mapsto y_2\) in the expression (5.28), we get that the sum on the left hand side of (5.30) is

Using the first three factors we can reduce the problem to the case \(|x| \leqslant C\) for some large constant C. Now, as we have done in previous instances of complex interpolation, we use the substitution \(\lambda _1 x_1 - y_1 \mapsto y_1\), conclude that it is sufficient to consider the part of the integration domain where \(|y_1| \leqslant \lambda _1^\varepsilon \). In particular then \(x_1 \sim 1\) and we can use Taylor approximation for \(\psi _\omega \) and \(\psi _\beta \) at \(x_1\). Then one gets

where \(|\partial _1^N r_\omega | \sim 1\) and \(|\partial _1^N r_\beta | \sim 1\) for any \(N \geqslant 0\). Also note that \(2^{-j}\lambda _1^{1/2} \ll 1\).
We may now conclude that it is sufficient to consider the cases when either \(|A| \gg 1\) or \(|B| \gg 1\), where \( A :=2^{-k} \lambda _1 Q_\omega (x_1,x_2,\delta _1), \, B :=\lambda _1 Q_\beta (x_1,x_3,\delta _1), \) since otherwise, when both |A| and |B| are bounded, we could apply Lemma 3.4, similarly as in the case \(2^{2j} \delta _3 \gg 1\), to the function

where we would plug in
Note that the upper bounds on \(z_4\) and \(z_5\) are given by the summation bounds for the parameter \(\lambda _1\), and that the function H does not depend on \(z_5\). Furthermore, the \(C^1\) norm of H in \((z_1,z_2,z_3,z_4,z_5)\) is bounded since derivatives of Schwartz functions are Schwartz and only factors of polynomial growth in \(y_1\) and \(y_2\) appear when taking the derivatives. The polynomial growth in \(y_1\) can be dealt with by using the first factor. For the polynomial growth in \(y_2\) one has to consider the cases \(|y_2| \lesssim |y_1|^N\) and \(|y_2| \gg |y_1|^N\) separately. In the first case we can obviously again use the first factor, and in the second case we use the third factor inside which the term \(b^{\#} y_2^2\) is now dominant.
Let us now first assume \(|B| \gg 1\). The first three factors within the integral are behaving essentially like

We may reduce ourselves to the discussion of the part of the integration domain where \(|y_1| \ll |B|^{\varepsilon _B}\) since otherwise, when \(|y_1| \gtrsim |B|^{\varepsilon _B}\), we could use the first factor, obtain the estimate \(|B|^{-N\varepsilon _B}\) for the integral, and then sum this geometric series in \(\lambda _1\). Then \(|B-y_1 r_\beta | \sim |B|\), and the integral we need to estimate is bounded by

for some constant C. Now one can again sum in \(\lambda _1\).
Let us now assume \(|B| \leqslant C_B\) for some large, but fixed constant \(C_B\), and let \(|A| \gg C_B\). Again, we can reduce ourselves to the part where \(|y_1| \ll |A|^{\varepsilon _A}\), and so \(|A-2^{-k}y_1 r_\omega | \sim |A|\). Therefore if \(|y_2| \leqslant |A|^{1/2}\), then using the second factor we get that the integral is bounded (up to a constant) by \(|A|^{-N}\). If \(|y_2| > |A|^{1/2}\), then \(|B-y_1 r_\beta - y_2^2 b^{\#}| \gtrsim |A|\) and so we can use the third factor, and sum in \(\lambda _1\).
Case 1.2 \(\lambda _1 \sim \lambda _3\), \(\lambda _2 \ll \lambda _1\), and \(\lambda _2 > 2^j \lambda _1^{1/2}\). In this case we have the same bound for the Fourier transform as in Case 1.1. Hence, using \(\Vert \nu _j^\lambda \Vert _{L^\infty } \lesssim 2^j \lambda _1\) and interpolating one can easily see that we can sum the operator pieces absolutely in this case.
Case 2.1 \(\lambda _2 \sim \lambda _3\), \(\lambda _1 \ll \lambda _2\), and \(\lambda _2 \leqslant 2^{2j}\). Here again we may use stationary phase in both variables (and when \(|x_2| \sim 1\) even integration by parts in \(x_2\)). The estimates are
and therefore independent of \(\lambda _1\). As in [16] we define
and note that then we can write
where \(\chi _0\) is a smooth cutoff function supported in a sufficiently small neighbourhood of 0. Therefore, one easily sees that using the same argumentation as for \(\nu _j^\lambda \) we have
The operator norm bound is
Hence, if \(\theta < 1/3\), then we obtain the desired result by summing the geometric series, and if \(\theta = 1/3\), one needs to use complex interpolation.
Here we skip the proof since its very similar to Case 1.1 after one notes that since we obtain the function \(\sigma _j^{\lambda _2,\lambda _2}\) by summation in \(\lambda _1\), the expression (5.28) has to be replaced by

Recall that the function \(\chi _0\) of the first factor within the integral in this case has support contained in \([-\epsilon ,\epsilon ]\) where the small constant \(\epsilon \) depends on the implicit constant in the relation \(\lambda _1 \ll \lambda _2\).
Case 2.2 \(\lambda _2 \sim \lambda _3\), \(\lambda _1 \ll \lambda _2\), and \(\lambda _2 > 2^{2j}\). Similarly as in the previous case one has
from which one obtains the desired estimate by summing absolutely.
Case 3.1 \(\lambda _1 \sim \lambda _2\), \(\lambda _3 \ll \lambda _1\), and \(\lambda _3^{1/2} \gtrsim 2^{-j} \lambda _1\). In this case, by stationary phase in both variables, the estimates are
If \(\theta < 1/3\) one can again sum the operator pieces absolutely. For \(\theta = 1/3\) we see
Therefore, in this case we shall need the oscillatory sum lemma with two parameters (Lemma 3.6) when applying complex interpolation.
As usual we assume \(\lambda _1 = \lambda _2\). We consider the following function parametrised by the complex number \(\zeta \):
where \(\gamma (\zeta )\) is to be defined later as appropriate. The summation is over all \(\lambda _1\) and \(\lambda _3\) satisfying the conditions of this case (Case 3.1). Notice that we necessarily have \(\lambda _1 \gg 1\).
We denote by \(T_\zeta \) the associated convolution operator against the Fourier transform of \(\mu _\zeta \). Then by interpolation it suffices to prove
with constants uniform in \(t \in {\mathbb {R}}\).
In order to prove the first estimate, we need the decay bound (3.5), i.e.,
But this follows automatically by (5.31), the definition of \(\mu _\zeta \), and the fact that each \(\widehat{\nu _j^\lambda }\) has its support located at \(\lambda \).
It remains to prove the \(L^2 \rightarrow L^2\) estimate by showing
uniformly in t.
After substituting \(\lambda _1 y_1 \mapsto y_1\) and \(\lambda _3^{1/2} y_2 \mapsto y_2\) in the expression (5.28), we get that the sum on the left hand side of (5.32) is

Using the first two factors we can restrict ourselves to the case when \(|(x_1,x_2)| \leqslant C\) for some large constant C.
Next, we use the substitution \(\lambda _1 x_1 - y_1 \mapsto y_1\), conclude that it is sufficient to consider integration over \(|y_1| \leqslant \lambda _1^\varepsilon \) and that we have \(x_1 \sim 1\). Then, after using the Taylor approximation for \(\psi _\omega \) and \(\psi _\beta \) at \(x_1\), one gets

where \(|\partial _1^N r_\omega | \sim 1\) and \(|\partial _1^N r_\beta | \sim 1\) for any \(N \geqslant 0\). Recall that \(2^{-j}\lambda _1\lambda _3^{-1/2} \lesssim 1\) and \(\lambda _3 \lambda _1^{-1} \ll 1\).
If we define \(A :=\lambda _1 Q_\omega (x_1,x_2,\delta _1)\), \(B :=\lambda _3 Q_\beta (x_1,x_3,\delta _1)\), then we need to see what happens when either \(|A| \gg 1\) or \(|B| \gg 1\). Let us assume that \(C_B\) is a sufficiently large positive constant.
Subcase \(|B| > C_B\) and \(|A| \lesssim 1\). In this case we shall use the Hölder variant of the one parameter oscillatory sum lemma (Lemma 3.5) for each fixed \(\lambda _3\). We define

where we shall plug in
Note that the parameters \(\lambda _3\) and \(x_3\) are not bounded.
Applying Lemma 3.5 we get
if we add an appropriate factor to \(\gamma \) (i.e., our \(\gamma \) needs to contain a factor equal to the expression (3.1)). It remains to prove that one can estimate \(\Vert {\tilde{H}}\Vert _{L^\infty }\) and the constants \(C_k\), \(k =1,2,3,4\), by \(|B|^{-\varepsilon _B}\) since then we can sum in \(\lambda _3\).
First let us consider the expression for \({\tilde{H}}(z)\). The first three factors within the integral are behaving essentially like

Since we could otherwise use the first factor and estimate by \(|B|^{-\varepsilon _B}\), we may restrict our discussion to the part of the integration domain where \(|y_1| \ll |B|^{\varepsilon _B}\). Then we have \(|B-z_4 y_1 r_\beta | \sim |B|\), and therefore

for a constant C. Hence, we have the required bound for \(\Vert {\tilde{H}}\Vert _{L^\infty }\).
Next, we see that taking derivatives in \(z_1\) and \(z_4\), doesn’t change in an essential way the actual form of \({\tilde{H}}\) since we only obtain polynomial growth in \(y_1\) which can be absorbed by \({\widehat{\chi }}_1(y_1)\), and since derivatives of Schwartz functions are again Schwartz. Therefore, we may estimate \(C_k\), \(k=1,4\), in the same way as we estimated the original integral.
Permuting the order of the variables \(z_k\), \(k=1,2,3,4\) appropriately, we see from the expressions for \(C_k\) in Lemma 3.5 that we may now assume \(z_1=z_4=0\). Taking the derivative in \(z_3\) we obtain several terms. We deal with the terms where a \(y_1\) factor appears in the same way as we have dealt with in the previous cases. It remains to deal with the term where \(y_2^2\) factor appears, that is

This integral can be estimated by

The key is now to notice that if we fix \(\lambda _3\), then \(\lambda _1\) goes over the set where \(\lambda _1 \gg \lambda _3\). In particular, since we shall plug in \(z_3 = \lambda _1^{-\varepsilon }\), we have \(|z_3|^{-1+1/\varepsilon } \lesssim \lambda _3^{-1+\varepsilon }\). Therefore using the first factor in (5.35) we obtain the bound for (5.35) to be

for some different \(\varepsilon \). Now one subsitutes \(t = y_2^2 b^{\#}\) and easily obtains an admissible bound of the form \(|B|^{-\varepsilon _B}\).
For the last constant \(C_2\) we shall need to consider the Hölder norm. Here we may assume \(z_1=z_3=z_4=0\). The derivative in \(z_2\) can be estimated by the integral

We shall now consider only the part where \(y_2 \geqslant 0\) and \(z_2 \geqslant 0\), as other cases can be treated in the same way. Then substituting \(t = y_2^2\) one gets that the estimate for \(\partial _{z_2} {\tilde{H}}\) is

From this form it is obvious that we may now restrict ourselves to the part of the integration domain where \(|y_1| \ll |B|^{\varepsilon _B}\) and \(|t| \sim |B|\) by using the first and the third factor respectively. If we denote this integration domain by \(U_B\), then the bound for the \(C_2\) constant in Lemma 3.5 reduces to estimating

where \(\vartheta \) represents the Hölder exponent. If \(|z_2| \leqslant |B|^{-1/4}\), then we obviously have the required estimate. Therefore, let us assume \(|z_2| > |B|^{-1/4}\). Then \(|z_2|^{-\vartheta } < |B|^{\vartheta /4}\) and so integration on the domain \(|{\tilde{s}}| \leqslant |B|^{-1/4}\) is not a problem. On the other hand, if \(|{\tilde{s}}| > |B|^{-1/4}\), then \(|{\tilde{s}} t^{1/2}| \gtrsim |B|^{1/4}\) by our assumption on the size of t. Thus we may use the Schwartz property of the second factor in the integral and obtain the required estimate. This finishes the proof of the case where \(|B| \gg 1\) and \(|A| \lesssim 1\).
Subcase \(|B| > C_B\) and \(|A| \gg 1\). The preceding argumentation for the estimate of \(\Vert {\tilde{H}} \Vert _{L^\infty }\) is also valid in this case since we have not used the second factor, and so we see that we can always estimate the integral appearing in (5.33) by \(|B|^{-1/2}\). It remains to gain a decay in |A|.
If we furthermore assume \(|A| \leqslant |B|\), then \(|B|^{-1/2} \leqslant |B|^{-1/4} |A|^{-1/4}\), and so we can sum in both \(\lambda _1\) and \(\lambda _3\). Therefore we may consider \(|A| > |B|\) next, and reduce our problem using the first factor in the integral in (5.33) to the part where \(|y_1| \ll |A|^{\varepsilon _A}\). Then \(|z_1-y_1 r_\omega |=|A-y_1 r_\omega | \sim |A|\), and so we can gain an \(|A|^{-\varepsilon _A}\) using the second factor in the integral, unless \(|z_2 y_2| \sim |A|\). But since \(|z_2| \lesssim 1\), we see that \(|z_2 y_2| \sim |A|\) implies \(|y_2| \gtrsim |A|\), and so we can use finally the third factor where then the \(y_2^2\) term is dominant.
Subcase \(|B| \leqslant C_B\) and \(|A| > C_B^2\). We can reduce ourselves to the integration over \(|y_1| \ll |A|^{\varepsilon _A}\), and so \(|A-y_1 r_\omega | \sim |A|\). Therefore, if \(|y_2| \leqslant |A|^{1/2}\), then using the second factor we get that the integral is bounded (up to a constant) by \(|A|^{-1}\). If \(|y_2| > |A|^{1/2}\), then \(|B - z_4 y_1 r_\beta - y_2^2 b^{\#}| \gtrsim |A|\), and so we can use the third factor, and sum in both \(\lambda _1\) and \(\lambda _3\) (since \(|B|<|A|\)).
Subcase \(|B| \leqslant C_B\) and \(|A| \leqslant C_B^2\). Finally, if both \(|A| \leqslant C_B^2\) and \(|B| \leqslant C_B\) are bounded, we use the two parameter oscillatory sum lemma. We define the function

where we shall plug in
The associated exponents are \((\alpha _1,\alpha _2) = (-3/2,-3/4)\) and
and so for each k the pairs \((\alpha _1,\alpha _2)\) and \((\beta _1^k,\beta _2^k)\) are linearly independent. The \(C^2\) norm of H is uniformly bounded in the bounded paramteres \((x_1, \delta , 2^{-j})\) by arguing in the same manner as in Case 1.1. Therefore we may apply Lemma 3.6 if we take \(\gamma \) to contain a factor equal to the expression (3.3) (with \(\theta = 1/3\)). Recall that \(\gamma \) needs to contain also the factor from the case where we applied the one parameter lemma (i.e., where we had \(|B| > C_B\) and \(|A| \lesssim 1\)).
Case 3.2. \(\lambda _1 \sim \lambda _2\), \(\lambda _3 \ll \lambda _1\), and \(\lambda _3^{1/2} \ll 2^{-j} \lambda _1\). Here we have the same bound for the Fourier transform as in the previous case. Therefore
One easily shows that in the case \(\lambda _1 > 2^{2j}\) the operator pieces are always summable. The other case is when \(2^j \ll \lambda _1 \leqslant 2^{2j}\) and here we have summability if and only if \(\theta < 1/3\). For \(\theta = 1/3\), we have
This operator norm estimate motivates us to define k through \(2^k :=\lambda _1^2 \lambda _3^{-1} = 2^{2k_1-k_3}\), where \(2^{k_1} = \lambda _1\) and \(2^{k_3} = \lambda _3\). Our goal is to prove for each k that
for some \(0 \leqslant \varepsilon < 1/2\). Since \(k \geqslant 2j\), we then obtain the desired result by summation in k.
We shall slightly simplify the proof by assuming that \(\lambda _1 = \lambda _2\). Let us consider the following function parametrised by the complex number \(\zeta \) and k:
where \(\gamma (\zeta ) = 2^{-3(\zeta -1)/2} - 1\). Let \(T_\zeta ^{k}\) denote the associated convolution operator. By interpolation, we need to prove
for some \(0 \leqslant \varepsilon < 1/2\), and with constants uniform in \(t \in {\mathbb {R}}\). The first estimate follows right away since \(\widehat{\nu _j^\lambda }\) have supports located at \(\lambda \), and therefore by the \(L^\infty \) estimate for the Fourier transform of \(\nu _j^\lambda \) we have
We prove the second estimate by using the oscillatory sum lemma. We need to prove
uniformly in t.
Let us discuss first the index ranges for \(\lambda _1\), \(\lambda _3\), and \(2^k = \lambda _1^2 \lambda _3^{-1}\). Recall that we are in the case where \(2^j \ll \lambda _1 \leqslant 2^{2j}\) and \(1 \leqslant \lambda _3 \ll \lambda _1^2 2^{-2j}\), which implies \(\lambda _3 \ll \lambda _1\) and \(2^{2j} \ll 2^k \leqslant 2^{4j}\). Let us now fix any k satisfying \(2^{2j} \ll 2^k \leqslant 2^{4j}\), and let us consider all \((\lambda _1,\lambda _3)\) such that \(2^k = \lambda _1^2 \lambda _3^{-1}\). We shall use the oscillatory sum lemma by summing in \(\lambda _1\) and consider \(\lambda _3 = \lambda _1^2 2^{-k}\) as a function of \(\lambda _1\) and k. The conditions for \(\lambda _1\) are then
which determine an interval of integers \(I_{j,k}\) for \(k_1\) (recall \(\lambda _1 = 2^{k_1}\)).
After substituting \(\lambda _1 y_1 \mapsto y_1\) and \(2^{-j} \lambda _1 y_2 \mapsto y_2\) in the expression (5.28), we get that the sum on the left hand side of (5.37) is

Since using the first two factors we can get a decay in \(\lambda _1\), we can restrict ourselves to the case \(|(x_1, x_2)| \lesssim 1\). When \(|x_3| \gg 1\), then by using the third factor we can gain a factor \(\lambda _3^{-1} = (\lambda _1^{2} 2^{-k})^{-1}\), which sums up to a number of size \(\sim 1\), by the definition of \(I_{j,k}\). Therefore we may and shall assume \(|x| \lesssim 1\).
Next, we use the substitution \(\lambda _1 x_1 - y_1 \mapsto y_1\), conclude that it is sufficient to consider the part of the integration domain where \(|y_1| \leqslant \lambda _1^\varepsilon \), and that we may assume \(x_1 \sim 1\). If we use Taylor approximation for \(\psi _\omega \) and \(\psi _\beta \) at \(x_1\), then one gets

where \(|\partial _1^N r_\omega | \sim 1\) and \(|\partial _1^N r_\beta | \sim 1\) for any \(N \geqslant 0\). Note that \(2^{2j-k} \ll 1\) and \(\lambda _3 \lambda _1^{-1} \ll 1\), and therefore it is sufficient to consider the cases when either \(|A| \gg 1\) or \(|B| \gg 1\), where \(A :=\lambda _1 Q_\omega (x_1,x_2,\delta _1)\), \(B :=\lambda _3 Q_\beta (x_1,x_3,\delta _1)\), since otherwise we may use the oscillatory sum lemma. We remind that \(\lambda _3 = \lambda _1^{2} 2^{-k}\) is considered to be a function of \(\lambda _1\).
We concentrate on the first three factors within the integral:

where \(r_\omega \), \(r_\beta \), and \(b^{\#}\) are all converging in \(C^\infty \) to constant functions of magnitude \(\sim 1\) when \(\lambda _1 \rightarrow \infty \), \(\delta \rightarrow 0\), and \(j \rightarrow \infty \).
Let us denote by M a large enough positive number.
Subcase \(|B| > M^3\) and \(|A| \leqslant M\). Then because of the first factor we may restrict our discussion to the integration domain where \(|y_1| < |B|^{1/3}\). There \(|A-r_\omega y_1| \leqslant C|B|^{1/3}\) for some C. We may then furthermore assume \(|y_2| \leqslant 2C |B|^{1/3}\), since otherwise we could use the second factor. Now, if we take M sufficiently large, we have
and so we can now use the third factor’s Schwartz property to obtain a factor \(|B|^{-1}\), which gives summability in \(\lambda _1\).
Subcase \(|A| > M\). Here we shall need a slightly finer analysis. Note that using the first factor within the integral we can actually reduce ourselves to the integration within the slightly narrower range \(|y_1| < |A|^\varepsilon 2^{10\varepsilon (2j-k)}\) for some small \(\varepsilon \) (see (5.36)), and therefore we can also assume using the second factor that
for some C.
Now if \(|A|^\varepsilon 2^{10\varepsilon (2j-k)} \leqslant 1\), we obtain that the bound on the integral is \(|A|^{2\varepsilon } 2^{20\varepsilon (2j-k)}\) (the area of the surface over which we integrate), and this is summable in \(\lambda _1\) over the set \(|A|^\varepsilon 2^{10\varepsilon (2j-k)} \leqslant 1\).
Therefore, we assume \(|A|^\varepsilon 2^{10\varepsilon (2j-k)} > 1\), that is \(|A|^{1/10} > 2^{k-2j}\). Now, if M is sufficiently large, we then have by the restraint on \(y_2\) that \(|A|^2/2< y_2^2 < 2 |A|^2\), and hence
Therefore if either \(|B| \ll C_1 |A|^{2-1/10}\) or \(|B| \gg C_2 |A|^2\), we can simply use the Schwartz property of the third factor within the integral. Let us now assume that B is within the range \(|B| \in [C_1 |A|^{2-1/10}, C_2 |A|^2]\). We denote \(\delta _A :=|A|^\varepsilon 2^{10\varepsilon (2j-k)}\) and recall \(\delta _A > 1\) and \(|y_1| < \delta _A \leqslant |A|^\varepsilon \). Using the third factor within the integral we can reduce our problem to when
The implicit function theorem implies that
for some \(C'\). Since \(\delta _A \leqslant |A|^{1/10}\) and \(|B| > |A|^{3/2}\), we can conclude
that is, \(y_2\) goes over a set with length at most \(C' |A|^{-1/2}\). This implies that our integral is bounded by \(C' |A|^{-1/2+\varepsilon }\), which is summable in \(\lambda _1\).
Case 4.1. \(\lambda _1 \sim \lambda _2 \sim \lambda _3\) and \(\lambda _1 > 2^{2j}\). As explained in a bit more detail at the end of [16, Chapter 4] here we have
from which one gets by interpolation
One can show that the operator pieces in this case are summable if and only if \(\theta \leqslant 1/4\). For \(\theta = 1/3\), we can only sum in the range \(\lambda _1 > 2^{6j}\) and so it remains to see what happens when \(2^{2j} < \lambda _1 \leqslant 2^{6j}\). We denote the sum of the associated operator pieces for this remaining range by \(T_{\delta ,j}^{VII}\). We shall deal with this case in the following section.
Case 4.2. \(\lambda _1 \sim \lambda _2 \sim \lambda _3\) and \(\lambda _1 \leqslant 2^{2j}\). Here only the space-side estimate changes and we have
By interpolation one obtains
We denote the sum of the associated operator pieces by \(T_{\delta ,j}^{VIII}\). The above estimate is obviously summable if and only if \(\theta < 1/4\). For \(\theta = 1/4\) we one can use complex interpolation and obtain the desired estimate in the usual manner. We deal with \(\theta = 1/3\) in the next section.
6 Airy-type analysis in the case \(h_{\text {lin}}(\phi ) < 2\)
In this section we begin with the proof of the estimates for \(T^{VII}_{\delta , j}\) and \(T^{VIII}_{\delta , j}\) when \(\theta = 1/3\), i.e., when \(\phi \) is of type \(A_{n-1}\) with \(m=2\) and finite \(n\geqslant 5\). In this case \({\tilde{\sigma }} = 1/4\). We shall first recall some of the notation from [16, Chapter 5]. From now on \(\delta \) shall be a triple \((\delta _0, \delta _1, \delta _2)\) with \(\delta _0 = 2^{-j}\), we use \(\lambda \) to denote the common value \(\lambda _1 = \lambda _2 = \lambda _3\), and define
Then \(|s_i| \sim 1\) for \(i=1,2,3\), and we have
where \(\Phi \) is the total phase from (5.27) and
Recall that according to Case 4.1 and Case 4.2 from the last section of the previous section we have
and we can assume \(\lambda \gg 1\). Furthermore, recall that \(\sigma \sim 1\), and that
where \(b^a\) is the same function as in Sect. 2.4. It is the function b from Sect. 2.4 expressed in adapted coordinates. Recall that \(\beta (0) \ne 0\), \(\omega (0) \ne 0\), and \(b_0(y,0) = b^a(0,0) = b(0,0) \ne 0\) for all y.
In terms of s the expression for the Fourier transform of \(\nu _\delta ^\lambda :=\nu _j^\lambda \) becomes
where the amplitude \({\tilde{a}}(y,\delta ) :=a(y,\delta ) \chi _1(y_1) \chi _0(y_2)\) is a smooth function supported in the sets where \(x_1 \sim 1\) and \(|x_2| \lesssim 1\) and whose derivatives are uniformly bounded with respect to \(\delta \). If we denote
then the estimate we need to prove is
for \(\Big ( \frac{1}{{\mathfrak {p}}_1'}, \frac{1}{{\mathfrak {p}}_3'} \Big ) = \Big ( \frac{1}{6}, \frac{1}{4} \Big )\). This estimate corresponds to the estimate of the sum \(T_{\delta ,j}^{VII} + T_{\delta ,j}^{VIII}\) considered in the last section of the previous section (Case 4.1 and Case 4.2).
6.1 First steps and estimates
Our first step is to use the stationary phase in the \(y_2\) variable, ignoring the part away from the critical point where we can obtain absolutely summable estimates. Then, as explained in [16, Section 5.1], one obtains by using the implicit function theorem that the critical point \(x_2^c\) can be written as
where \(Y_2\) is smooth, \(Y_2(0,0,0)=-1/(2b(0,0))\), and \(|Y_2| \sim 1\). Now one defines
so we can write
where \(a_0\) is smooth and uniformly a classical symbol of order 0 with respect to \(\lambda \), and where
for a smooth \(Y_3\) with \(Y_3(0,0,0) = -1/4b(0,0) \ne 0\).
Recall that as \(a_0\) is a classical symbol we can express it as
where \(a_0^0\) does not depend on \(\lambda \) and \(a_0^1\) has the same properties as \(a_0\). This induces the decomposition
The function \(\nu _{\delta ,a_0^1}^\lambda \) associated to the amplitude \(a_0^1\) has Fourier transform bounded by \(\lambda ^{-3/2}\) and the \(L^\infty \) norm on the space side is bounded by \(\lambda ^{3/2}\) (by the same reasoning as used to obtain (5.38)). From these two bounds we can easily get the required estimate for the operator associated to \(\nu _{\delta ,a_0^1}^\lambda \). Therefore from now on, by an abuse of notation, we may and shall assume that \(\nu _\delta ^\lambda \) has an amplitude which does not depend on \(\lambda \), i.e.,
The next step is to localise the integration in the above integral to a small neighbourhood of the point where the second derivative vanishes. For \(\delta = 0\) this point is
Away from this point the estimate for the integral is at worst \(\lambda ^{-1}\), by stationary phase or integration by parts.
We now briefly explain how to deal with the part away from \(x_1^c\). Recall from Case 4 in the last section of the previous section that the space bound on \(\nu _\delta ^\lambda \) is \(2^j \lambda = \delta _0^{-1} \lambda \) if \(\lambda > 2^{2j} = \delta _0^{-2}\). Now using the results from Sect. 3.3 one can easily see that we can sum absolutely in \(\lambda > \delta _0^{-2}\). The case when \(\lambda \leqslant \delta _0^{-2}\) has to be dealt with complex interpolation as in the Case 4.2 from the last section of the previous section.
Hence we may now consider only the part near the critical point \(x_1^c\). Abusing the notation again, we shall denote the part near the critical point \(x_1^c\) by \(\nu _\delta ^\lambda \) too. Following [16] we shall furthermore assume without loss of generality
and that in (6.1) we are integrating over an arbitrarily small neighbourhood of \(x_1^c\). Therefore, we now have \(x_1^c(0, \sigma , s_2) = s_2^{1/(n-2)}\), \(|\Psi '''(x_1^c(\delta , \sigma , s_2),\delta ,\sigma ,s_1,s_2)| \sim 1\), (by implicit function theorem) \(x_1^c = x_1^c(\delta , \sigma , s_2)\) depends smoothly in all of its variables, and
We restate [16, Lemma 5.2.] how to locally develop \(\Psi \) at the critical point of \(\Psi '\), i.e., the point \(x_1^c\). Its proof is straightforward.
Lemma 6.1
The phase \(\Psi \) given by (6.1) can be developed locally around \(x_1^c\) in the form
where \(B_0\), \(B_1\), and \(B_3\) are smooth functions, and where \(|B_3(s_2, \delta , \sigma , y_1)| \sim 1\). In fact, we can write (after taking (6.2) into account)
where \(G_k\), \(k=1,2,3,4\), are all smooth and of the following forms at \(\delta = 0\):
where we defined \(G_5 :=G_1 G_3 - G_2\). One can easily check that \(G_k \ne 0\) for each \(k = 1,2,3,4,5\), since \(n \geqslant 5\).
By applying the lemma we may now write
where \(\chi _0\) is supported here in a sufficiently small neighbourhood of the origin and \(a_0\) denotes a slightly different function than before, but with the same relevant properties. We now decompose \(\widehat{\nu _\delta ^\lambda }\) further, motivated by Lemma 3.1, into parts where \(\lambda ^{2/3} |B_1(s',\delta ,\sigma )| \lesssim 1\) near the Airy cone, and \((2^{-l} \lambda )^{2/3} |B_1(s, \delta , \sigma )| \sim 1\) away from the Airy cone, for \(M_0 \leqslant 2^l \leqslant \lambda /M_1\), where \(M_0, M_1\) are sufficiently large. The Airy cone itself is given by the equation \(B_1 = 0\).
In order to obtain such a decomposition we take smooth cutoff functions \(\chi _0\) and \(\chi _1\) such that \(\chi _0\) is supported in a sufficiently large neighbourhood of the origin and \(\chi _1(t)\) is supported in a neighbourhood of the points \(-1\) and 1 and away from the origin. We furthermore assume that
on \({\mathbb {R}}{\setminus } \{0\}\). Then we can define
where \(M_0 \leqslant 2^l \leqslant \lambda /M_1\), so that
We denote the associated convolution operators, convolving against the Fourier transform of \(\nu ^\lambda _{\delta ,Ai}\) and \(\nu ^\lambda _{\delta ,l}\), by \(T^\lambda _{\delta ,Ai}\) and \(T^\lambda _{\delta ,l}\). Note that the size of the number \(M_0\) is related to how large of a neighbourhood of 0 the cutoff function \(\chi _0\) covers in the first equation of (6.5), and the size of the number \(M_1\) is related to how small of a neighbourhood of 0 we take in (6.4) for the \(y_1\) variable.
6.2 Estimates near the Airy cone
From Lemma 3.1, (a), we get that the bound on the Fourier transform of \(\nu ^\lambda _{\delta , Ai}\) is \(\lambda ^{-5/6}\). Unlike in [16] we shall need to use complex interpolation to be able to estimate the part \(T^\lambda _{\delta ,Ai}\). The proof here is actually similar to certain cases when \(h_{\text {lin}}(\phi ) \geqslant 2\) in [16, Subsection 8.7.1].
We consider the following function parametrised by \(\zeta \in {\mathbb {C}}\):
where \(\gamma (\zeta ) = (2^{-7(\zeta -1)/4} - 1)/(2^{7/6}-1)\). The associated operator acting by convolution against the Fourier transform of \(\mu _\zeta \) is denoted by \(T_\zeta \). By interpolation, that it is sufficient to prove
with constants uniform in \(t \in {\mathbb {R}}\).
In order to prove the first estimate, we need the decay bound (3.5), i.e.,
This follows right away by using the estimate on the Fourier transform of \(\nu ^\lambda _{\delta , Ai}\), the definition of \(\mu _\zeta \), and the fact that each \(\widehat{\nu ^\lambda _{\delta , Ai}}\) has its support located at \((\lambda ,\lambda ,\lambda )\).
We prove the second \(L^2 \rightarrow L^2\) estimate by using Lemma 3.4. We need to prove
uniformly in t.
As in [16, Subsection 5.1.1] we now apply Fourier inversion using the formulas (6.4), (6.5), and the form of the integral from Lemma 3.1, (a). Then after changing coordinates in the integration from \((\xi _1,\xi _2,\xi _3)\) to \((s_1, s_2, s_3)\) one gets
where g is the smooth function from Lemma 3.1, (a), whose derivatives of any order are uniformly bounded, and where
We may now also restrict ourselves to the situation where \(|x| \lesssim 1\), since otherwise we can get a factor \(\lambda ^{-N}\) by integrating by parts.
Finally, we change coordinates from \(s' = (s_1,s_2)\) to \((z,s_2)\), where \(z :=\lambda ^{2/3} B_1(s',\delta ,\sigma )\), and so by Lemma 6.1 we have
that is
Thus we obtain
where by using the expressions for \(B_0(s',\delta ,\sigma )\) and \(G_5(s_2,\delta ,\sigma )\) from Lemma 6.1 one gets
We may shorten the expression in (6.7) to
where \({\tilde{g}}\) is smooth with uniformly bounded derivatives and localising the integration domain to \(|z| \lesssim 1\), \(s_2 \sim |s_3| \sim 1\).
Next, we notice that \(\Phi (z,s_2^{n-2},x,0,\sigma )\) is a polynomial in \(s_2\) by (6.3). We therefore substitute \(s_0 = s_2^{1/(n-2)}\) and denote
We are interested in localising the integration in (6.9) to the place where \(\partial _{s_0}^2 {\tilde{\Phi }} = 0\) and \(\partial _{s_0}^3 {\tilde{\Phi }} \ne 0\). In order to carry out this reduction we need another simple lemma. It will be applied to the first three terms of
which constitute a polynomial in \(s_0\) whose derivatives have at most two zeros not located at the origin. Note that the last term in the above expression is arbitrarily small.
Lemma 6.2
Assume \(n \geqslant 5\) and consider a number \(x_0 \sim 1\). Let us define a polynomial of the form
whose second derivative can be written as
If \(|\varepsilon | \leqslant c_1\) for a sufficiently small constant \(c_1\), then \(|P'(x)| \sim 1\) on a neighbourhood of \(x_0\), which depends on \(c_1\), but not on \(\varepsilon \). On the other hand, if \(|\varepsilon | > c_2\) for some \(c_2 > 0\) and \(x_0-\varepsilon \sim 1\) (resp. \(x_0+\varepsilon \sim 1\)), then \(|P'''(x_0-\varepsilon )| \sim _{c_2} 1\) (resp. \(|P'''(x_0+\varepsilon )| \sim _{c_2} 1\)).
Proof
One needs to express b and c in terms of \(x_0\) and \(\varepsilon \), after which it is easy to prove the lemma by a straightforward calculation. \(\square \)
From the first conclusion of Lemma 6.2 we see that if the zeros of \(\partial _{s_0}^2 {\tilde{\Phi }}\) which are away from the origin are too close to each other, then we may use stationary phase or integration by parts to obtain a factor of \(\lambda ^{-1/2}\) (or better) and so the left hand side of (6.6) is absolutely summable. Therefore we may assume that there is at least some distance between the zeros of \(\partial _{s_0}^2 {\tilde{\Phi }}\). From the second conclusion of Lemma 6.2 we obtain \(|\partial _{s_0}^3 {\tilde{\Phi }}| \sim 1\) in a neighbourhood of those zeros within the integration domain (i.e., for those located at \(\sim 1\)).
Thus, we may now use the implicit function theorem and obtain a parametrisation of a zero of the first three terms of \(\partial _{s_0}^2 {\tilde{\Phi }}\):
which we shall denote by \(s_0^c(x,\delta ,\sigma )\), and assume it is located away from the origin. All such zeros can be treated the same way.
We may assume we integrate arbitrarily near the zero \(s_0^c(x,\delta ,\sigma )\) since again we could otherwise use stationary phase or integration by parts. We may then use a Taylor approximation for the first three terms in \({\tilde{\Phi }}\) at \(s_0^c(x,\delta ,\sigma )\) and obtain after translating \(s_0 \mapsto s_0 + s_0^c\) that the phase has the form
with functions \({\tilde{B}}_{i}\), \(i = 0,1,3\), being smooth and \(|{\tilde{B}}_3| \sim 1\). The functions \({\tilde{G}}_{i}\) are also smooth and have the property that they do not depend on \(s_0\) when \(\delta = 0\). Note also \({\tilde{G}}_2(s_0, x, 0, \sigma ) = 1\).
Hence, we have obtained an Airy type integral with an error term of size at most \(\lambda ^{-2/3}\). We denote this newly obtained function by \({\tilde{\nu }}^\lambda _{\delta , Ai}\):
where \({\tilde{g}}_1\) has the same properties as \({\tilde{g}}\), except that now the integration is over the domain where \(|z| \lesssim 1\), \(|s_3| \sim 1\), and \(|s_0| \ll 1\).
We now prove (6.6) for the remaining piece \({\tilde{\nu }}^\lambda _{\delta , Ai}\). Let us begin with the case when
satisfies \(|A| \gg 1\). We claim that in this case we can estimate the function \({\tilde{\nu }}^\lambda _{\delta , Ai}\) by \(\lambda ^{7/6} |A|^{-1/4}\), which is absolutely summable in \(\lambda \) in the expression (6.6) for \(\mu _{1+it}\). We need a modification of Lemma 3.1, (b), which is straightforward to prove.
Lemma 6.3
Consider the integral
where all the appearing functions are smooth with uniformly bounded derivatives, and \(|b_3(s_0)| \sim 1\). This integral can be estimated up to a constant by \(\lambda ^{-1/3} |\lambda ^{2/3} b_1|^{-1/4}\) if \(|\lambda ^{2/3} b_1| \gg 1\), \(\lambda \gg 1\), and \(\chi _0\) is supported in a sufficiently small neighbourhood of the origin.
Therefore after one applies the above lemma, our problem is reduced to the case \(|A| \lesssim 1\). Our next step is to substitute \(s_0 \mapsto \lambda ^{-1/3} s_0\). Then one gets
where
and the new integration domain is \(|z| \lesssim 1\), \(|s_3| \sim 1\), and \(|s_0| \ll \lambda ^{1/3}\).
Using a Taylor approximation we can rewrite the \({\tilde{G}}_1\) term as
where \(|\partial ^N_t r(t, x,\delta ,\sigma )| \ll _N 1\) for any \(N \geqslant 0\) since \({\tilde{G}}_1\) is constant when \(\delta = 0\). Therefore, if we denote \({\tilde{G}}_3 = {\tilde{G}}_2 - r\), then \({\tilde{G}}_3\) has the same properties as \({\tilde{G}}_2\) (in particular \({\tilde{G}}_3 \sim 1\)), and we can write
From this expression one sees that we can get an integrable factor of size \((1+|s_0|^2)^{-N/2}\) in the amplitude of \({\tilde{\nu }}^\lambda _{\delta , Ai}\) by using integration by parts in \(s_0\), i.e., we can assume
as the unbounded terms in the expression for the \(s_0\) derivative of \(\lambda {\tilde{\Phi }}_1(z,\lambda ^{-1/3} s_0,x,\delta ,\sigma )\) vanish.
Let us denote by
the unbounded terms of the phase. We need to reduce our problem to the case when \(|E| \lesssim 1\) and \(|F| \lesssim 1\) since then we can simply apply the oscillatory sum lemma.
We begin with the case \(|F| \gg 1\). Let us consider the z integration. The factor tied with z in the phase is
where \({\tilde{G}}_3(\lambda ^{-1/3} s_0, x, \delta , \sigma ) \sim 1\). We may therefore assume we are integrating over the area in \(s_0\) where
since otherwise we can use integration by parts in z and gain a factor \(|F|^{-\varepsilon }\). In particular, in this case we have \(|s_0| \sim |F|\). But then the integrable factor \((1+|s_0|^2)^{-N/2}\) is of size \(|F|^{-N}\) and so we obtain the required bound.
It remains to consider the case \(|F| \lesssim 1\) and \(|E| \gg 1\). The idea in this case is to use integration by parts in \(s_3\), which enables us to localise the integration to the set where \(|\lambda {\tilde{\Phi }}_1| \lesssim |E|^\varepsilon \). If we now take |E| sufficiently large compared to both |A| and |F|, then we see that \(|\lambda {\tilde{\Phi }}_1| \lesssim |E|^\varepsilon \) forces \(|s_0| \sim |E|^{1/3}\). But this implies that the integrable factor \((1+|s_0|^2)^{-N/2}\) is of size \(|E|^{-N/3}\), which is what we wanted. We are done with the part near the Airy cone.
6.3 Estimates away from the Airy cone: first considerations
Recall from (6.4) and (6.5) that we may write
where \(1 \ll 2^l \ll \lambda \). Applying Lemma 3.1, (b), we obtain
where we have slightly simplified the situation by ignoring the sign of the function q since both \(q_{+}\) and \(q_{-}\) appearing in Lemma 3.1, (b), can be treated in the same way. Note that q depends in the second variable only in \(s_2\) and not s since the same is true for \(B_3\), as can be readily seen from the proof of Lemma 3.1, (b). Recall that a, q, and E are smooth, and \(|q| \sim 1\). E and all its derivatives have Schwartz decay in the first variable, and a is a classical symbol of order 0 in the \(s_3\lambda |B_1(s', \delta , \sigma )|^{3/2}\) variable.
We denote
and slightly change a and E in order to absorb the \(s_3\) factors. Then we can rewrite the previous expression for \(\widehat{\nu ^\lambda _{\delta ,l}}\) as
From this we easily see that
We plan to use complex interpolation and the two parameter oscillatory sum lemma (Lemma 3.6). We consider the following function parametrised by \(\zeta \in {\mathbb {C}}\):
for an appropriate \(\gamma (\zeta )\) to be chosen later as in (3.3). We shall also use the one parameter oscillatory sum lemma for certain subcases, and therefore we shall need to add appropriate factors to \(\gamma \) of the form 3.1. The operator associated to \(\mu _\zeta \) we denote by \(T_\zeta \).
By Stein’s interpolation theorem, it is sufficient to prove
with constants uniform in \(t \in {\mathbb {R}}\).
In order to prove the first estimate we need the decay bound (3.5), i.e.,
This bound follows easily by the \(L^\infty \) bound on the Fourier transform of \(\nu ^\lambda _{\delta ,l}\), the definition of \(\mu _\zeta \), and the fact that each \(\widehat{\nu ^\lambda _{\delta ,l}}\) has its support located at \((\lambda ,\lambda ,\lambda )\).
It remains to prove the \(L^2 \rightarrow L^2\) estimate
uniformly in t.
We split the function \(\nu ^\lambda _{\delta ,l}\) as
where
and
with appropriate (and in each of the above expressions possibly different) \({\tilde{\chi }}_1\) smooth cutoff functions localising to the area where \(|s_1| \sim s_2 \sim |s_3| \sim |z| \sim 1\). In the expression for \(\nu ^E_{\lambda , l}\) we obtain the factor \(2^{-Nl}\) by using the Schwartz property in the first variable of E, and so the function E is slightly different than before, but with the same properties.
6.4 Estimates away from the Airy cone: the estimate for \(\nu ^E_{\lambda , l}\)
The function \(\nu ^E_{\lambda , l}\) can be treated similarly as the function \(\nu ^\lambda _{\delta , Ai}\) in the case near the Airy cone. We first apply the inverse of the Fourier transform to \(\widehat{\nu ^E_{\lambda , l}}\), and then substitute \(s=(s_1,s_2,s_3)\) for \(\xi =(\xi _1, \xi _2, \xi _3)\). Recall that \(z = (2^{-l}\lambda )^{2/3} B_1(s',\delta ,\sigma )\) and so by Lemma 6.1 one has
We plug in this expression for \(s_1\) and also substitute \(s_0\) for \(s_2^{1/(n-2)}\). In the end one gets
where \(g_2\) is smooth and has all of its derivatives Schwartz in the first variable, and where
The only difference compared to the phase in (6.8) is that there \(|z| \lesssim 1\), while here \(|z| \sim 1\), and instead of the \(\lambda ^{-2/3}\) factor in front of z in the phase in (6.8), here we have the much larger factor \((2^l \lambda ^{-1})^{2/3}\).
We can now reduce to the situation where \(|x| \lesssim 1\). Namely, if \(|x_1| \gg 1\) then we integrate by parts in z to gain a factor \((\lambda (2^l \lambda ^{-1})^{2/3})^{-N}\). Otherwise if \(|x_1| \lesssim 1\) and \(|x_2| \gg 1\), then we integrate by parts in \(s_0\) to obtain a factor \(\lambda ^{-N}\), and if \(|(x_1,x_2)| \lesssim 1\) and \(|x_3| \gg 1\), we integrate by parts in \(s_3\) to again gain a factor of \(\lambda ^{-N}\).
Next, recall that \((2^l \lambda ^{-1})^{2/3} \ll 1\). Therefore, we may use again Lemma 6.2 and argue similarly as we did in the case near the Airy cone to reduce ourselves to a small neighbourhood of a point where the second derivative in \(s_0\) of the first three terms of \(\Phi _2\) vanishes and \(|\partial _{s_0}^3 \Phi _2| \sim 1\). By the implicit function theorem we may parametrise this point as \(s^c = s^c(x, \delta , \sigma )\):
The point \(s^c\) depends smoothly on \((x,\delta ,\sigma )\).
Translating to the point \(s^c\) and localising to a small neighbourhood we obtain a new function \({\tilde{\nu }}^E_{\lambda , l}\) of the form
where \({\tilde{g}}_2\) has the same properties as \(g_2\), except that now \(|s_0| \ll 1\). The new phase is
where \(|{\tilde{B}}_3| \sim 1\) and \(H_1 \sim 1\). Additionally, one can see that \(H_0\) and \(H_1\) do not depend on \(s_0\) when \(\delta = 0\).
The next step is to develop the whole phase \({\tilde{\Phi }}_2\) at the point where \(\partial _{s_0}^2 {\tilde{\Phi }}_2 = 0\). The reason for this is that the factor \((2^l \lambda ^{-1})^{2/3}\) is too large, and we cannot apply something similar to Lemma 6.3. Let us denote the critical point of \(\partial _{s_0} {\tilde{\Phi }}_2\) by \(s_0^c = s_0^c(x,\delta ,\sigma , (2^l \lambda ^{-1})^{2/3} z)\). Note that \(s_0^c\) is identically 0 when either \(\delta = 0\) or the variable refering to \((2^l \lambda ^{-1})^{2/3} z\) is 0. Therefore, we can actually write
where \({\tilde{s}}_0^c\) is smooth and identically 0 when \(\delta = 0\).
If we shorten \(\rho = (2^l \lambda ^{-1})^{2/3} z\), then the expression for the first derivative of \({\tilde{\Phi }}_2\) at the point \(s_0^c\) has the form
where \(h(s^c_0, x, \delta , \sigma ) \sim 1\) and \(|b(s_0^c, x,\delta ,\sigma )| \sim 1\) for some smooth functions h and b.
One can easily check that \(|\partial ^3_{s_0} {\tilde{\Phi }}_2 (z,s_0,x,\delta ,\sigma )| \sim 1\). Therefore, developing the phase \({\tilde{\Phi }}_2\) at the point \(s^c_0\), we may write
where we suppressed the dependence of \(b_0, b_1, {\tilde{b}}_1\), and \(b_3\) on the bounded parameters \((x,\delta ,\sigma )\). Here we know that \({\tilde{b}}_1 \sim 1\) and \(|b_3| \sim 1\). We may again assume \(|s_0| \ll 1\) as on the other part where \(|s_0| \gtrsim 1\) we could use integration by parts or stationary phase and obtain an expression which when plugged into (6.10) would be absolutely summable in both \(\lambda \) and \(2^l\).
Finally, we develop the term \(b_0\) at 0 and substitute \(s_0 \mapsto \lambda ^{-1/3}s_0\). Then
and the remaining part of the function \({\tilde{\nu }}^E_{\lambda , l}\) is of the form
where again \(g_3\) has the same properties as \({\tilde{g}}_2\) and in the area of integration we have \(|s_0| \ll \lambda ^{1/3}\).
Now, we first note that we can assume \(\lambda ^{-1/3} 2^{4l/3} \ll 1\) since otherwise we can easily sum in both \(\lambda \) and l using the factor \(2^{-Nl}\) for a sufficiently large N. Next, we introduce
We need to reduce our problem to the situation when A, B, and D are bounded since then we can simply apply the (one parameter) oscillatory sum lemma. When this is the case, the size of the integration domain in (6.12) is not a problem since, if we split the integration domain to the areas where \(|s_0| \lesssim 2^{l/3}\) and \(|s_0| \gg 2^{l/3}\), the first part has domain size \(2^{l/3}\), which is admissible, and in the second part the amplitude is integrable in \(s_0\) after using integration by parts.
Case \(|D| \gg 1\). We consider two subcases. The first subcase is when
Here we can actually use the Airy integral lemma (Lemma 3.1, (b)) applied to \(s_0\) integration before substituting \(s_0 \mapsto \lambda ^{-1/3}s_0\), i.e., using the phase form (6.11), and obtain the bound
for some constant \(\varepsilon > 0\). After plugging into (6.10) this is absolutely summable in \(\lambda \). Namely, in the cases \(|D| \ll 2^{2l/3}\) and \(|D| \gg 2^{2l/3}\) we get the estimate \(|D|^{-\varepsilon }\), which is summable, and the case \(|D| \sim 2^{2l/3}\) happens for only \({\mathcal {O}}(1)\) \(\lambda \)’s, which depend on l.
The second subcase is when
Then necessarily again \(|D| \sim |2^{2l/3}|\), and this can happen only for \({\mathcal {O}}(1)\) \(\lambda \)’s. By (6.12) we have
for maybe some different N. The factor \(\lambda ^{7/6}\) is retained since in this case we can get an integrable factor in \(s_0\) by using integration by parts. After plugging into (6.10) we may sum over the \({\mathcal {O}}(1)\) \(\lambda \)’s and then in l.
Case \(|D| \lesssim 1\), and \(|A| \gg 1\) or \(|B| \gg 1\). The case \(|A| \sim |B|\) can again happen only for \({\mathcal {O}}(1)\) number of \(\lambda \)’s and so we can assume that either \(|A| \gg |B|\) or \(|B| \gg |A|\). Both cases can be treated equally and so we can assume without loss of generality that \(|A| \gg |B|\). Then we can rewrite the phase in the form
where we know that for l sufficiently large \(|B_0| \sim |A|\), \(|B_1| \sim 2^{2l/3}\), and \(|b_3| \sim 1\).
In order to simplify the situation a bit, we develop the amplitude function \(g_3\) into a sum of tensor products, separating the \(s_3\) variable from the others. It is sufficient to consider each of these tensor product terms separately, and so we can assume without loss of generality that
where \({\tilde{g}}_3\) has the same properties as \(g_3\), except it does not depend on \(s_3\).
Then, after using the Fourier transform in \(s_3\), the integral in \(s_0\) for the function \(\tilde{{\tilde{\nu }}}^E_{\lambda , l}\) is of the form

where we have suppressed the variables of \(B_0\) and \(B_1\). One can easily check that this integral is bounded by \(2^{l/3}\) by considering the situations where \(|s_0| \lesssim 2^{l/3}\) and \(|s_0| \gg 2^{l/3}\) separately. This is in fact true if we use any \(L^1 \cap L^\infty \) function instead of  .
.
If now \(|B_0 - B_1 s_0 + b_3(\lambda ^{-1/3} s_0, \rho ) s_0^3| \gtrsim |A|^\varepsilon \), by using the Schwartz property we obtain the bound
with a different N, which after plugging into (6.10) is summable.
Next, if \(|B_0 - B_1 s_0 + b_3(\lambda ^{-1/3} s_0, \rho ) s_0^3| \ll |A|^\varepsilon \), then
for some small \(c > 0\). In particular, the fact \(|B_0| \sim A\) gives us
First we consider integration over the domain \(|s_0| \lesssim 2^{l/3}\). In this case we get
which in turn implies that \(|A| \lesssim 2^l\). But this means we can trade a \(2^{-l}\) factor for a \(|A|^{-1}\) and so we are done. The second part of the integral is where \(|s_0| \gg 2^{l/3}\), which implies \(|B_1 s_0 - b_3(\lambda ^{-1/3} s_0, \rho ) s_0^3| \sim |s_0|^3\), i.e., \(|s_0| \sim |A|^{1/3}\). But as the derivative of
is of size \(|s_0|^2 \sim |A|^{2/3}\), then if we substitute \(t = B_1 s_0 - b_3(\lambda ^{-1/3} s_0, \rho ) s_0^3\) in the integral (6.13), the Jacobian is of size \(|A|^{-2/3}\) and so the same \(|A|^{-2/3}\) bound holds for the integral. We are done with the estimate for the function \(\nu ^E_{\lambda , l}\).
6.5 Estimates away from the Airy cone: the estimate for \(\nu ^a_{\lambda , l}\)
Again substituting first s for \(\xi \), then \(s_1\) for z, and then \(s_0\) for \(s_2^{1/(n-2)}\), we obtain the expression
where \(g_4\) is smooth in all of its variables and a classical symbol of order 0 in the last \(2^l\) variable, and where
We assume \(z \sim 1\) since the case \(z \sim -1\) can be treated in the same way.
We can restrict ourselves to the case \(|x| \lesssim 1\) arguing in the same way as in the previous case. In fact, we can restrict ourselves to the case \(|x_1 - s_0 G_1(s_0^{n-2}, \delta , \sigma )| \ll 1\), since otherwise we can use integration by parts in z. From this it follows \(|x_1| \sim 1\). Since \(G_1(s_0^{n-2},0,\sigma ) = 1\), we can also localise the integration in \(s_0\) to an arbitrarily small interval containing \(x_1\).
Lemma 6.4
Define the polynomial
If \(|x_1| \sim \sigma \sim |\beta (0)| \sim 1\), \(n \geqslant 5\), and \(|x_2| \lesssim 1\), then
and this expression is a polynomial in \((x_1,x_2)\).
Proof
One just takes the derivatives in \(s_0\) and then takes \(s_0 = x_1\). \(\square \)
The coefficients of the polynomial in the above lemma come from the first three terms of \(\Phi _4(z,s_0,x,0,\sigma )\) and from Lemma 6.1. Hence, the above lemma relates the first and the second \(s_0\) derivative of \(\Phi _4\) at \(x_1\).
We develop the phase \(\Phi _4\) in the variable \(u :=x_1 - s_0 G_1(s_0^{n-2}, \delta , \sigma )\), which is just a translation of \(s_0\) to \(x_1\) when \(\delta = 0\). Then we can write
where \(|q_1| \sim 1\). From Lemma 6.4 one easily sees that we can conclude that either \(|b_1| \sim |b_2| \sim 1\) or \(|b_1|, |b_2| \ll 1\). Since \(|u| \ll 1\), the case \(|b_1| \sim |b_2| \sim 1\) would imply that we can integrate by parts in u and obtain a factor \(\lambda ^{-N}\). Therefore, we may and shall assume that both \(|b_1|\) and \(|b_2|\) are very small, and so we can apply Lemma 6.2 to obtain \(|b_3| \sim 1\) (this reduction one could have also gotten by checking the third derivative in Lemma 6.4).
Now note that if |u| is not of size \((2^l \lambda ^{-1})^{1/3}\), then we can apply integration by parts in z to gain a factor \(2^{-lN}\). In fact, after we substitute \(u = (2^l \lambda ^{-1})^{1/3} v\), we can get a factor of size \(2^{-lN} (1+|v|^2)^{-N/2}\) by integrating by parts in z. Thus, we may restrict ourselves to the discussion of
where both \(g_5\) and \({\tilde{g}}_5\) have the same properties as \(g_4\). In the expression for \(\nu ^a_{I}\) the \(\chi _0((2^l \lambda ^{-1})^{1/3} v)\) factor localises so that \(|u| = |(2^l \lambda ^{-1})^{1/3} v| \ll 1\). Suppressing dependence on \((x,\delta ,\sigma )\), the phase is of the form
Estimates for \(\nu ^a_{I}\). In this case we plan to use the oscillatory sum lemma in \(\lambda \) only and consider \(2^l\) as a parameter. Let us denote
We need to reduce our problem to the case when A, B, and D are bounded. As here the integral itself is bounded by \(\lesssim 1\), we can assume that it is not the case that \(|A| \sim |B|\), nor \(|B| \sim |C|\), nor \(|A| \sim |C|\), since otherwise \(\lambda \)’s would go over a finite set, and we could sum in l. Furthermore, as soon as |A| (resp. |B|, or |C|) is greater than 1, then we can automatically assume that \(|A| \gg 2^{4l}\) (resp. \(|B| \gg 2^{4l}\), or \(|C| \gg 2^{4l}\)), since otherwise we could trade some factors \(2^{-lN}\) to obtain a factor \(|A|^{-\varepsilon }\) (resp. \(|B|^{-\varepsilon }\), or \(|D|^{-\varepsilon }\)) giving summability in \(\lambda \) in the expression (6.10).
If at least one of |A|, |B|, or |C| are greater than 1, we define
and develop the function \({\tilde{g}}_5\) into a series of tensor products with variable \(s_3\) separated, i.e., into a sum with terms of the form
where h has the same properties as \({\tilde{g}}_5\), except it does not depend on \(s_3\). Then after taking the Fourier transform in \(s_3\), we are reduced to estimating the integral

Case \(|v| \ll 1\). The bound \(|v| \ll 1\) gives
If
\(|A| \gg \max \{2^{4l}, |B|, |D|\}\), then we can easily gain a factor
\(|A|^{-1}\) using the Schwartz property of
 . If
\(|B| \gg \max \{2^{4l}, |A|, |D|\}\), then the size of the derivative in v of the function within
. If
\(|B| \gg \max \{2^{4l}, |A|, |D|\}\), then the size of the derivative in v of the function within
 is B and so we get the bound
\(|B|^{-1}\) by substitution. Finally, if
\(|D| \gg \max \{2^{4l}, |A|, |B|\}\), we use the van der Corput lemma and obtain the bound
\(|D|^{-1/2}\).
is B and so we get the bound
\(|B|^{-1}\) by substitution. Finally, if
\(|D| \gg \max \{2^{4l}, |A|, |B|\}\), we use the van der Corput lemma and obtain the bound
\(|D|^{-1/2}\).
Case \(1 \ll |v| \ll (2^l \lambda ^{-1})^{-1/3}\). In this case we can rewrite
where \({\tilde{f}}\) is a smooth function with \(|{\tilde{f}}| \sim 1\) and \(|\partial ^{k}_v {\tilde{f}}| \ll |v|^{-k}\) for all \(k \geqslant 1\). This means that f is behaving essentially like \(v^3\), and in particular
Subcase \(\max \{|B|,|D|\} \geqslant 1\). As mentioned before, this actually implies that we can assume \(\max \{|B|,|D|\} \geqslant 2^{4l}\). If now \(|D| \gg |B|\), then since we could otherwise use the factor \((1+|v|^2)^{-N/2}\) in (6.15), we can restrain the integration to the domain \(|v| \ll |D|^\varepsilon \). Here the derivative in v of the expression
inside the Schwartz function  in (6.15) is of size \(|B+c Dv|\) for some \(|c| = |c(v)| \sim 1\). But recall that \(|v| \gg 1\) and so \(|B+c Dv| \sim |Dv| \gg |D|\). This means that substituting the above expression would give a Jacobian of size at most \(|D|^{-1}\).
in (6.15) is of size \(|B+c Dv|\) for some \(|c| = |c(v)| \sim 1\). But recall that \(|v| \gg 1\) and so \(|B+c Dv| \sim |Dv| \gg |D|\). This means that substituting the above expression would give a Jacobian of size at most \(|D|^{-1}\).
Next let us consider the case \(|D| \lesssim |B|\). If have the slightly stronger estimate \(|D| \lesssim |B|^{1-\varepsilon }\), and if we assume \(|v| \ll |B|^\varepsilon \) (which we can because of the factor \((1+|v|^2)^{-N/2}\)), then in this case the derivative of (6.16) is of size |B|, which means substituting this expression yields an admissible bound.
Therefore, we may now consider the case \(|B|^{1-\varepsilon } \ll |D| \lesssim |B|\) and \(|v| \ll |D|^\varepsilon \), which implies, in case when \(\varepsilon \) is sufficiently small, that \(|D| \geqslant 2^{3l}\). In particular, the derivative of (6.16) can be again written as \(|B+c Dv|\) with \(|c| \sim 1\), and we can reduce our problem to the part where \(|B+c Dv| \ll |D|^\varepsilon \), since otherwise substituting would give a Jacobian of size at most \(|D|^{-\varepsilon }\). But now \(|B+c Dv| \ll |D|^\varepsilon \) implies \(|v| \sim |B| |D|^{-1}\). Hence, it suffices to estimate the integral

We substitute \(w = |B|^{-1}\,|D| v\) and write

Applying the van der Corput lemma we obtain the estimate
and so we are done with the case \(\max \{|B|,|D|\} \geqslant 1\).
Subcase \(\max \{|B|,|D|\} \leqslant 1\) and \(|A| \gg 1\). Again, we may actually assume \(|A| \gg 2^{4l}\). We may also then reduce ourselves to the discussion of the case \(|v| \ll |A|^\varepsilon \), since in the other part of the integration domain we can gain a factor \(|A|^{-\varepsilon }\). But then the expression (6.16) is of size \(\sim |A|\) and we can get a factor \(|A|^{-1}\), and hence we are also done with the function \(\nu _I^a\).
Estimates for \(\nu ^a_{II}\). Here we have a non-degenerate critical point in z which would give us a factor \(2^{-l/2}\). We shall not apply directly the stationary phase method here since in this case some crucial information has been lost while we were deriving the form of the phase in this and the previous sections. It seems that one cannot prove the required bound for complex interpolation using the information from the form of the phase (6.14). One needs to go back to the phase form in the original coordinates (the one before taking the inverse Fourier transform is (6.1)) and find the critical point in the variables \((y_1,s_1)\). This was carried out in [16] (see the discussion before [16, Lemma 5.6.]). Here we only sketch the steps.
The phase in (6.1) is
and one integrates in the \(y_1\) variable. The phase function after one applies the Fourier transform is
and one now integrates in the s and \(y_1\) variables, after substituting s for \(\xi \). Recall that \(s_0 = s_2^{1/(n-2)}\) and
Therefore fixing \((s_2,s_3)\) is equivalent to fixing \((v,s_3)\), and in this case, finding the critical point in \((y_1, s_1)\) is equivalent to finding the critical point in the \((y_1, z)\) coordinates. Recall that the phase form in (6.14) was derived by using the stationary phase method in \(y_1\) (implicitly done as a part of Lemma 3.1) and changing variables from \(s = (s_1, s_2, s_3)\) to \((z,v,s_3)\).
The key is now to notice that since the critical point is invariant with respect to coordinate changes, and so, after applying the stationary phase in z to the phase function (6.14), we get \(\Phi _5(z^c,v,x,\delta ,\sigma )\), which is the equal to the phase function in (6.17) after we apply the stationary phase in \((y_1,s_1)\) and get \(\Phi _0(y_1^c, s_1^c, s_2, x, \delta , \sigma )\), and then change the coordinates from \(s_2\) to v. This was carried out in [16] by explicitly calculating the critical point in \((y_1,s_1)\) in (6.17) (see [16, Lemma 5.6]). One obtains that we can rewrite the function \(\nu _{II}^a\) as
where
with \({\tilde{b}}_0\), \({\tilde{b}}_1\), \({\tilde{b}}_2\) smooth, and \(|{\tilde{b}}_2| \sim 1\). The amplitude \(g_6\) is a classical symbol of order 0 in \(2^l\), but we shall ignore this dependence since the lower order terms can be treated similarly, and even simpler since we can gain summability in l and use the one parameter oscillatory sum lemma for \(\lambda \).
We remark that the variable \({\tilde{v}}\) is only slightly different from the variable v defined above after the statement of Lemma 6.4. Here \({\tilde{v}}\) corresponds to the v variable of [16, Subsection 5.2.3]. Comparing the definitions of both and using the implicit function theorem one can show that for some smooth \({\tilde{G}}\) satisfying \(|{\tilde{G}}| \sim 1\) one has \({\tilde{v}} = v {\tilde{G}}((2^l \lambda ^{-1})^{1/3} v, x_1, \delta , \sigma )\). In particular, there is no significant difference between v and \({\tilde{v}}\).
We define \(A :=\lambda {\tilde{b}}_0(x,\delta ,\sigma )\), \(B :=\lambda ^{2/3} 2^{l/3} {\tilde{b}}_1 (x,\delta ,\sigma )\), \(D :=\delta _0^2 2^{2l/3} \lambda ^{1/3}\), suppress the variables of \({\tilde{b}}_2\), and shorten \(\rho = \delta _0 (2^l \lambda ^{-1})^{1/3}\). Then
and in order to use the oscillatory sum lemma for two parameters we need to reduce the problem to the situation where |A|, |B|, and |D| are of size \(\lesssim 1\). In the following we define k through \(\lambda = 2^{k}\).
First we treat the case when at least two of |A|, |B|, and |D| are comparable. When this is the case, \(\lambda \) can go over only a finite set of indices (the index sets depending on l and other constants), and it remains to sum only in l. This is done in the following way. If \(|D| \gtrsim 1\), then we can use van der Corput lemma and obtain a factor \(|D|^{-1/2}\), which is summable in l. If \(|D| \ll 1\), then the only case remaining is \(|A| \sim |B|\), and here we can use integration by parts in \({\tilde{v}}\) and obtain a factor \(|B|^{-1}\) which we use to sum in l.
Next, we assume that we have a “strict order” between |A|, |B|, and |D|. First we shall consider the cases when at least two of |A|, |B|, and |D| are greater than 1. If \(|A| \gg \max \{|B|, |D|\} \gtrsim 1\), we use integration by parts in \(s_3\) and obtain
which is summable. Similarly, if \(|B| \gg \max \{|A|, |D|\} \gtrsim 1\), we can integrate by parts in \({\tilde{v}}\) and obtain the estimate
which is summable. And if now \(|D| \gg \max \{|A|, |B|\} \gtrsim 1\), we use the van der Corput lemma and obtain
which is again summable. We are thus reduced to the case where one of |A|, |B|, or |D| are greater than 1, and the other two much smaller.
Case \(|A| \geqslant 1\) and \(\max \{|B|, |D|\} \ll 1\). In this case by using integration by parts in \(s_3\) we can get a factor \(|A|^{-1}\). We use the one dimensional oscillatory sum lemma in l, and afterwards, we can sum in \(\lambda \) using the factor \(|A|^{-1}\) which can be obtained as the bound on the \(C^1\) norm of the function to which we applied the oscillatory sum lemma.
Case \(|B| \geqslant 1\) and \(\max \{|A|, |D|\} \ll 1\). Here we change the summation variables
so that we now sum over \((k_1,k_2)\). This change of variables corresponds to the system
which has determinant equal to 1, and so the associated linear mapping is a bijection on \({\mathbb {Z}}^2\).
Since the summation bounds (without the constraints set by A, B, or D) are \(1 \ll \lambda \leqslant \delta _0^{-6}\) and \(1 \ll 2^l \ll \lambda \), for each fixed \(k_1\) the summation in \(k_2\) is now within the range \(2^{k_1/3} \ll 2^{k_2} \ll 2^{k_1/2}\), and the summation in \(k_1\) is for \(1 \ll 2^{k_1} \ll \delta _0^{-18}\).
The quantities B and D can be rewritten as
Now for a fixed \(k_1\) we can apply the one-dimensional oscillatory sum lemma to sum in \(2^{k_2}\) since all the terms coupled with \(2^{k_2}\) are now within a bounded range. In order to sum in \(k_1\), one needs to estimate the \(C^1\) norm of the function to which we have applied the oscillatory sum lemma. One can easily see that integrating by parts in \(s_0\) we obtain a factor \(|B|^{-1}\) which in the new indices depends only on \(2^{k_1}\).
Case \(|D| \geqslant 1\) and \(\max \{|A|, |B|\} \ll 1\). In this case we also change the summation variables
so that we now sum over \((k_1,k_2)\). We have
Therefore when we fix \(k_1\), the summation in \(k_2\) goes over an interval of even or uneven integers, depending on the parity of \(k_1\). Since the summation bounds (without the constraints set by A, B, or D) are \(1 \ll \lambda \leqslant \delta _0^{-6}\) and \(1 \ll 2^l \ll \lambda \), for each \(k_1\) the summation in \(k_2\) is now within the range \(2^{k_1/3} \ll 2^{k_2} \ll 2^{k_1}\), and the summation in \(k_1\) is for \(1 \ll 2^{k_1} \ll \delta _0^{-18}\).
The quantities B and D can be rewritten as
For a fixed \(k_1\) we want to apply the oscillatory sum lemma to the summation in \(k_2\). We remark that formally one should write \(k_2\) as either \(2r+1\) or 2r (depending on the parity of \(k_1\)), and then apply the oscillatory sum lemma to the summation in r instead of \(k_2\).
Here we give a bit more details compared to the previous case since the term \(\rho \), which contains \((2^l \lambda ^{-1})^{1/3}\), is coupled with D. We need to estimate the \(C^1\) norm of the function
Formally, one should also add further dummy \(z_i\)’s for controlling the range of the summation indices. Since we are in the case where \(|D| \geqslant 1\), \(|z_1| \ll 1\), and \(|z_2| \ll 1\), integrating by parts in \(s_3\) we get that the \(L^\infty \) estimate is \(|D|^{-1}\). Taking derivatives in \(z_1\) and \(z_2\) does not change the form of the integral in an essential way, and so we can also estimate the \(L^\infty \) norm of the these derivatives by \(|D|^{-1}\). Taking the derivative in \(z_3\) a factor of size at most |D| appears, but now we just apply integration by parts in \(s_3\) two times and get that we can estimate the \(C^1\) norm of H by \(|D|^{-1}\).
Case \(|A| \lesssim 1\), \(|B| \lesssim 1\), and \(|D| \lesssim 1\). Here we apply the two-parameter oscillatory sum lemma. We only need to check the additional linear independence condition appearing in the assumptions of Lemma 3.6. The terms where \(\lambda = 2^k\) and \(2^l\) appear are
where
and recall from (6.10) that \((\alpha _1,\alpha _2) = (-7/4,-1/2)\). Formally, we also have to consider additionally \((\beta _1^5,\beta _2^5) = (-1,0)\) and \((\beta _1^6,\beta _2^6) = (0,-1)\) for implementing the lower summation bounds for \(\lambda \) and \(2^l\) as in (6.10). We see that the condition \(\alpha _1 \beta _2^r \ne \alpha _2 \beta _1^r\) is satisfied for each \(r = 1,\ldots ,6\). Therefore, we may now apply the lemma and obtain the inequality (6.10). This finishes the proof of Theorem 5.1.
Notes
An easy calculation shows that \(P_{l_0} = \frac{1}{2} (\frac{1}{m+1}( 1 + ({\kappa _2^{l_0}-\kappa _2})/({\kappa _1^{l_0}-\kappa _1}) ), \kappa _2 - \kappa _1 ({\kappa _2^{l_0}-\kappa _2})/({\kappa _1^{l_0}-\kappa _1}) )\) and that for indices \(l = l_0+1, \ldots , l^a\) one has \(P_{l } = \frac{1}{2} (\frac{1}{m+1}( 1 + ({\kappa _2^{l}-\kappa _2^{l-1}})/({\kappa _1^{l}-\kappa _1^{l-1}}) ), \kappa _2^{l-1} - \kappa _1^{l-1} ({\kappa _2^{l}-\kappa _2^{l-1}})/({\kappa _1^{l}-\kappa _1^{l-1}}) )\).
There is a typo in [16, Lemma 2.1]: in the estimate in part (a) the expression \((1+|\lambda |)^{-1/M}\) should be changed to \(|\lambda |^{-1/M}\).
There is a slight error in [16, Lemma 2.2]. Namely, there the functions \(a_{\pm }\) should also be classical symbols of order 0 in the same variable as stated here.
In the equation right above [15, Equation (4.7)] there is a typo. Instead of \((|\kappa |/2+1)k\) in the exponent, it should be \((|\kappa |+2)k\).
Here we don’t need a mixed norm Littlewood-Paley theorem since the decomposition is only in the tangential direction where \(p_1=p_2\). Note that the ordering of the mixed norm is important, namely that the outer norm is associated to the normal direction.
References
Benedek, A., Calderón, A.-P., Panzone, R.: Convolution operators on Banach space valued functions. Proc. Nat. Acad. Sci. USA 48, 356–365 (1962)
Bourgain, J.: Besicovitch-type maximal operators and applications to Fourier analysis. Geom. Funct. Anal. 1(2), 147–187 (1991)
Bourgain, J., Guth, L.: Bounds on oscillatory integral operators. C. R. Acad. Sci. Paris Ser. I 349, 137–141 (2011)
Carleson, L., Sjölin, P.: Oscillatory integrals and a multiplier problem for the disc. Studia Math. 44, 287–299 (1972)
van der Corput, J.G.: Zahlentheoretische Abschätzungen. Math. Ann. 84, 53–79 (1921)
Duistermaat, J.J.: Oscillatory integrals, Lagrange immersions and unfolding of singularities. Commun. Pure Appl. Math. 27, 207–281 (1974)
Fefferman, C.: Inequalities for strongly singular convolution operators. Acta Math. 124, 9–36 (1974)
Fernandez, D.L.: Vector-valued singular integral operators on \(L^p\)-opaces with mixed norms and applications. Pac. J. Math. 129(2), 257–275 (1987)
Ginibre, J., Velo, G.: Smoothing properties and retarded estimates for some dispersive evolution equations. Commun. Math. Phys. 144, 163–188 (1992)
Greenblatt, M.: The asymptotic behavior of degenerate oscillatory integrals in two dimensions. J. Funct. Anal. 257(6), 1759–1798 (2009)
Greenleaf, A.: Principal curvature and harmonic analysis. Indiana Univ. Math. J. 30(4), 519–537 (1981)
Guth, L.: A restriction estimate using polynomial partitioning. J. Am. Math. Soc. 29, 371–413 (2016)
Ikromov, I.A., Kempe, M., Müller, D.: Estimates for maximal functions associated to hypersurfaces in \({\mathbb{R}}^3\) and related problems of harmonic analysis. Acta Math. 204, 151–271 (2010)
Ikromov, I.A., Müller, D.: On adapted coordinate systems. Trans. Am. Math. Soc. 363(6), 2821–2848 (2011)
Ikromov, I.A., Müller, D.: Uniform estimates for the Fourier transform of surface carried measures in \({\mathbb{R}}^3\) and an application to Fourier restriction. J. Fourier Anal. Appl. 17(6), 1292–1332 (2011)
Ikromov, I.A., Müller, D.: Fourier Restriction for Hypersurfaces in Three Dimensions and Newton Polyhedra. Princeton University Press, Princeton (2016)
Iosevich, A., Sawyer, E.: Maximal averages over surfaces. Adv. Math. 132, 46–119 (1997)
Karpushkin, V.N.: A theorem on uniform estimates for oscillatory integrals with a phase depending on two variables. Trudy Semin. Petrovsk. 10, 150–169, 238 (1984) [in Russian; English translation in J. Sov. Math. 35, 2809–2826 (1986)]
Klainerman, S., Machedon, M.: Space-time estimates for null forms and the local existence theorem. Commun. Pure Appl. Math. 46(9), 1221–1268 (1993)
Keel, M., Tao, T.: Endpoint strichartz estimates. Am. J. Math. 120(5), 955–980 (1998)
Lee, S., Vargas, A.: Restriction estimates for some surfaces with vanishing curvatures. J. Funct. Anal. 258(9), 2884–2909 (2010)
Lizorkin, P.I.: Multipliers of Fourier integrals and bounds of convolutions in spaces with mixed norm. Appl. Izv. Akad. Nauk SSSR Ser. Mat. 34, 218–247 (1970) [in Russian. English translation in Mathematics of the USSR-Izvestiya, Vol. 4(1), 225–255 (1970)]
Montgomery-Smith, S.J.: Time decay for the bounded mean oscillation of solutions of the Schrödinger and wave equations. Duke Math J. 91(2), 393–408 (1998)
Moyua, A., Vargas, A., Vega, L.: Schrödinger maximal function and restriction properties of the Fourier transform. Int. Math. Res. Not. 16, 793–815 (1996)
Phong, D.H., Stein, E.M.: The Newton polyhedron and oscillatory integral operators. Acta Math. 179(1), 105–152 (1997)
Phong, D.H., Stein, E.M., Sturm, J.A.: On the growth and stability of real-analytic functions. Am. J. Math. 121(3), 519–554 (1999)
Siersma, D.: Classification and deformation of singularities. Doctoral dissertation, University of Amsterdam, pp. 1–115 (1974)
Stein, E.M.: Harmonic analysis: Real-variable methods, orthogonality, and oscillatory integrals, vol. 43. Princeton Mathematical Series, Princeton University Press, Princeton (1971)
Strichartz, R.S.: Restrictions of Fourier transforms to quadratic surfaces and decay of solutions of wave equations. Duke Math. J. 44, 705–714 (1977)
Tao, T.: A sharp bilinear restriction estimate for paraboloids. Geom. Funct. Anal. 13(6), 1359–1384 (2003)
Tomas, P.A.: A restriction theorem for the Fourier transform. Bull. Am. Math. Soc. 81, 477–478 (1975)
Varchenko, A.N., Newton polyhedra and estimates of oscillating integrals. Funkcional. Anal. i Priložen 10, 13–38 (1976) [in Russian. English translation in Functional Anal. Appl. 18, 175–196 (1976)]
Wolff, T.: A sharp bilinear cone restriction estimate. Ann. Math. 153(5), 661–698 (2001)
Zygmund, A.: On Fourier coefficients and transforms of functions of two variables. Studia Math. 50, 189–201 (1974)
Acknowledgements
Open Access funding provided by Projekt DEAL. I would like to thank my supervisor Prof. Dr. Detlef Müller for numerous useful discussions we had and for his valuable comments on how to improve this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The author has been supported by Deutsche Forschungsgemeinschaft, project number 237750060, Fragen der Harmonischen Analysis im Zusammenhang mit Hyperflächen.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Palle, L. Mixed norm Strichartz-type estimates for hypersurfaces in three dimensions. Math. Z. 297, 1529–1599 (2021). https://doi.org/10.1007/s00209-020-02568-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00209-020-02568-8