
Abstract
Given an initial \(C^1\) hypersurface and a time-dependent vector field in a Sobolev space, we prove a time-global existence of a family of hypersurfaces which start from the given hypersurface and which move by the velocity equal to the mean curvature plus the given vector field. We show that the hypersurfaces are \(C^1\) for a short time and, even after some singularities occur, almost everywhere \(C^1\) away from the higher multiplicity region.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
A family \(\{M_t\}_{t\ge 0}\) of hypersurfaces in \({\mathbb R}^n\) is called mean curvature flow (MCF) if the velocity vector v of \(M_t\) is equal to its mean curvature vector h at each point and time, that is,
As one of the fundamental geometric evolution problems, the MCF has been studied by numerous researchers in the past few decades. One of many facets of investigations is the time-global existence question of such a family when given an initial hypersurface \(M_0\). In general dimensions, there exists a unique smooth family of MCF for finite time until singularities such as vanishing and pinch-off occur. Though the classical MCF ceases to exist at this point, it is well-known that a unique time-global solution \(\{M_t\}_{t\ge 0}\) exists in a weak viscosity sense [11, 16] despite the occurrence of singularities.
In this paper, we are interested in an aspect of time-global existence theory for a related problem, and the question we ask is the following. Given an initial hypersurface \(M_0\) and a vector field u, is there a family \(\{M_t\}_{t\ge 0}\) of hypersurfaces whose velocity vector v is equal to its mean curvature h plus u? What is the minimum regularity assumption on u for the existence and regularity of such a family? To be more precise, since we would be interested in the normal velocity to see the motion, the requirement is
where \(\nu \) is the unit normal vector field of \(M_t\) and \(\ \cdot \ \) is the inner product in \({\mathbb R}^n\). Motivation to investigate (1.2) is more than just to see what happens when an extra lower order term is added. While the MCF is of premier importance, one wonders what is the limit of applicability of various analytic techniques developed for the MCF if one puts a wild perturbation. In a reverse context, if one understands the limit of generality of the MCF, then some of the analytic techniques developed for more general settings may be useful for the MCF. In fact, our investigation on (1.2) has already led us to the development of a local regularity theory [30, 46] which gives new insight to the MCF. Physically, one may regard (1.2) as a surface tension driven phase boundary motion with a given background transport effect such as fluid flow or external force field. One can also find such motion law in a coupled system with the Navier-Stokes equation modeling a flow of dry foam (see, for example, [31] for the numerical simulation and references therein).
Though far from complete, in this paper we obtain satisfactory time-global existence and regularity theorems if we assume that \(M_0\) is \(C^1\) and u satisfies
for all \(T<\infty \), with \(2<q<\infty \) and \(\frac{nq}{2(q-1)}<p<\infty \) (\(\frac{4}{3}\le p\) in addition if \(n=2\)). Here \(\nabla u=(\partial _{x_1}u,\ldots ,\partial _{x_n}u)\) is the weak partial derivatives and \(u,\nabla u\) are measurable with the stated integrability. We prove that the hypersurfaces remain \(C^1\) at least for a short time, and it is a.e. \(C^1\) away from a region where \(M_t\) develops higher multiplicities. With more regularity assumption on u such as Hölder continuity, we have \(C^2\) instead of \(C^1\) and (1.2) is satisfied classically. For the precise statement of the regularity, see Theorem 2.3.
Here we briefly discuss our approach. If u is regular enough with respect to x, for example Lipschitz continuous, the level set method approach works well with a good order preserving property (see, for example, [22] and [20, Sect. 4.8]). Also for regular enough u, there are a number of short time existence results which are often stated for the MCF but which can be extended to include regular u: (1) solving an evolution equation for the height function from the reference initial manifold [10], (2) solving equations for signed distance function [17] (and elaborated further in [21]), and (3) constructing an approximate solution by time-discrete minimal movement [3], just to name a few examples. On the other hand, with irregular u, one can not expect the order preserving property in general and even the short time existence of solution can be a serious issue. Hence to characterize (1.2), we take an approach pioneered by Brakke [6] using the notion of varifold from geometric measure theory. To construct a sequence of approximate solutions, we use the Allen-Cahn equation [2] with an extra transport term coming from u, (3.5). Much of the analysis of the present paper concerns various \(\varepsilon \)-independent estimates of quantities associated with \(\varphi _{\varepsilon }\). We obtain a desired solution by taking a limit \(\varepsilon \rightarrow 0\). Thus the interest of the present paper can be also the analysis of (3.5) itself. Once we verify that the limit satisfies (1.2) in a weak sense of varifold as in Brakke’s formulation, we apply a local regularity theory developed in [30, 46] which is tailor-made for the present problem. To our knowledge, under the assumption (1.3) of u, even the short time existence of \(C^1\) solution seems new.
As for the MCF in general, there are a number of books and papers some of which include up-to-date research results on the subject and we mention [4, 5, 12, 14, 20, 35, 48]. Concerning a time-global existence for the MCF and the related problems, we mention [3, 6, 11, 16, 29, 34] and references therein. While there are numerous works with varying generalities establishing the connection between the Allen-Cahn equation and the MCF (for example [7, 9, 13, 15, 19, 39]), analysis of the Allen-Cahn equation using geometric measure theory was pioneered by Ilmanen [28] in which he proved that the limit surface measures are rectifiable and satisfy (1.1) in the sense of Brakke’s formulation. The second author proved that the limit surface measures are integral [45]. There are a number of closely related works even if we restrict the scope within some measure theoretic approach to the Allen-Cahn equation, and we further mention [37, 40, 42, 43] and references therein. The existence result of the present paper has been proved by Liu et al. [33] for \(n=2,3\) and with more restrictive assumptions on p and q. The limitation of the dimensions was due to the use of results by Röger and Schätzle [38], which gives a characterization of limit measures under an assumption of uniform \(L^2\) bound of mean curvature-like quantity. In the present paper, we avoid using [38], and we follow the line of proofs of [28, 45] combined with various estimates from [33]. This frees us from any dimensional restriction. As a special case, the first author investigated the graph-like problem of (1.2) with a better regularity assumption on u and showed a unique short time existence [44].
The paper is organized as follows. In Sect. 2 we set our notations and explain the main results. In Sect. 3 we briefly discuss some heuristic aspects of the Allen-Cahn equation. Section 4 deals with the uniform upper density ratio bound and monotonicity formula, and this is the key to control the transport term subsequently. In Sect. 5, we show that there exists a limit surface measure for all \(t\ge 0\). Section 6 proves that the limit measure is rectifiable and this part owes much to Ilmanen’s work [28]. In Sect. 7, we prove that the limit measure has integer density modulo surface energy constant. There, the idea of proof goes back to [27] and the parabolic version [45]. In Sect. 8 we prove the main results by combining all the results from previous four sections. We record our final remarks in the last Sect. 9. We intended the paper to be as self-contained as possible, only exception being the proof for regularity. There we cite the main local regularity theorem which has a set of assumptions we need to check.
2 Preliminaries and main results
2.1 Basic notation
Let \({\mathbb N}\) be the set of natural numbers and \({\mathbb R}^+:=\{x\ge 0\}\). For \(0<r<\infty \) and \(a\in {\mathbb R}^k\) define
We write \(B_r^k:=B_r^k(0)\). When \(k=n\), we omit writing n. We often identify \({\mathbb R}^{n-1}\) with \({\mathbb R}^{n-1}\times \{0\}\subset {\mathbb R}^n\). On \({\mathbb R}^n\) we denote the Lebesgue measure by \({\mathcal L}^n\) and for \(0\le k\le n\), the k-dimensional Hausdorff measure by \({\mathcal H}^{k}\). Define \(\omega _n:={\mathcal L}^n(B_1)\). Given a set \(A\subset {\mathbb R}^n\) and a measure \(\mu \), the restriction of \(\mu \) to A is denoted by \(\mu \lfloor _A\). The characteristic function of A is denoted by \(\chi _A\). Symbol \(\nabla \) always refers to a differentiation with respect to the space variables. For a set of finite perimeter (see [24] for the definition) A, we denote the total variation measure of the distributional derivative \(\nabla \chi _A\) by \(\Vert \nabla \chi _A\Vert \).
Throughout the paper, we set \(\Omega \) to be either \({\mathbb T}^n\), the n-dimensional unit torus, or \({\mathbb R}^n\). For \(\Omega ={\mathbb T}^n\) we often regard \(\Omega \) as the unit square \([0,1)\times \cdots \times [0,1)\subset {\mathbb R}^n\) where all the relevant quantities are extended periodically to the entire \({\mathbb R}^n\). Objects such as functions and sets in \(\Omega \) are understood implicitly in this manner. For any Radon measure \(\mu \) on \({\mathbb R}^n\) and \(\phi \in C_c({\mathbb R}^n)\) we often write \(\mu (\phi )\) for \(\int \phi \, d\mu \). We write \(\mathrm{spt}\,\mu \) for the support of \(\mu \). Thus \(x\in \mathrm{spt}\,\mu \) if \(\forall r>0\), \(\mu (B_r(x))>0\). For \(1\le p\le \infty \), we write \(f\in L^p(\mu )\) if f is \(\mu \) measurable and \((\int |f|^p\, d\mu )^{1/p}<\infty \). We use the standard notation for Sobolev spaces such as \(W^{1,p}(\Omega )\) and \(W^{1,p}_{loc}(\Omega )\) from [23].
For \(A,B\in \mathrm{Hom}({\mathbb R}^n;{\mathbb R}^n)\) which we identify with \(n\times n\) matrices, we define
\(\Vert A\Vert \) denotes the operator norm. The identity of \(\mathrm{Hom}({\mathbb R}^n;{\mathbb R}^n)\) is denoted by I. For \(k\in {\mathbb N}\) with \(k<n\), let \(\mathbf{G}(n,k)\) be the space of k-dimensional subspaces of \({\mathbb R}^n\). The orthogonal complement of \(S\in \mathbf{G}(n,k)\) is denoted by \(S^{\perp }\in \mathbf{G}(n,n-k)\). For \(a\in \mathbb {R}^n\), \(a\otimes a \in \mathrm{Hom}({\mathbb R}^n;{\mathbb R}^n)\) is the matrix with the entries \(a_ia_j\) (\(1\le i,j\le n\)). For \(S\in \mathbf{G}(n,k)\), we identify S with the corresponding orthogonal projection of \({\mathbb R}^n\) onto S. In the case of \(k=n-1\), we also identify \(S\in \mathbf{G}(n,n-1)\) with the unit vector \(\pm \nu \in {\mathbb S}^{n-1}\) which is perpendicular to S. Note that we may express the relation by \(S=I-\nu \otimes \nu \). The correspondence is a homeomorphism with respect to the naturally endowed topologies on \(\mathbf{G}(n,n-1)\) and \({\mathbb S}^{n-1}/\{\pm 1\}\). For \(x,y\in {\mathbb R}^n\) and \(t<s\) define
which is the backward heat kernel with pole at (y, s).
2.2 Varifolds
We recall some definitions from geometric measure theory and refer to [1, 6, 41] for more details. For any open set \(U\subset {\mathbb R}^n\) let \(G_{k}(U):=U\times \mathbf{G}(n,k)\). A general k-varifold in U is a Radon measure on \(G_k(U)\). We denote the set of all general k-varifolds in U by \(\mathbf {V}_k(U)\). For \(V\in \mathbf {V}_k(U)\), let \(\Vert V\Vert \) be the weight measure of V, namely,
We say \(V\in \mathbf {V}_k(U)\) is rectifiable if there exist a \({\mathcal H}^k\) measurable countably k-rectifiable set \(M\subset U\) and a locally \({\mathcal H}^k\) integrable function \(\theta \) defined on M such that
for \(\phi \in C_c (G_k(U))\). Here \(\mathrm{Tan}_x M\) is the approximate tangent space of M at x which exists \({\mathcal H}^k\) a.e. on M. Rectifiable k-varifold is uniquely determined by its weight measure \(\Vert V\Vert =\theta \,{\mathcal H}^{n-1}\lfloor _{M}\) through the formula (2.2). For this reason, we naturally say a Radon measure \(\mu \) on U is rectifiable when one can associate a rectifiable varifold V such that \(\Vert V\Vert =\mu \). If \(\theta \in {\mathbb N}\), \({\mathcal H}^k\) a.e. on M, we say V is integral. The set of all integral k-varifolds in U is denoted by \(\mathbf{IV}_k(U)\). If \(\theta =1\), \({\mathcal H}^k\) a.e. on M, we say V is a unit density k-varifold.
For \(V\in \mathbf {V}_k(U)\) let \(\delta V\) be the first variation of V, namely,
for \(g\in C_c^1(U\,;\,{\mathbb R}^n)\). If the total variation \(\Vert \delta V\Vert \) of \(\delta V\) is locally bounded and absolutely continuous with respect to \(\Vert V\Vert \), by the Radon-Nikodym theorem, we have a \(\Vert V\Vert \) measurable vector field \(h(V,\cdot )\) with
The vector field \(h(V,\cdot )\) is called the generalized mean curvature vector of V. For any \(V\in \mathbf{IV}_k(U)\) with an integrable \(h(V,\cdot )\), Brakke’s perpendicularity theorem [6, Chapter 5] says that we have
for all \(g\in C_c(U;{\mathbb R}^n)\). Here, M is related to V as in (2.2). In the case of \(k=n-1\), note that \((\mathrm{Tan}_x M)^{\perp }=\nu (x)\otimes \nu (x)\) for \(\Vert V\Vert \) a.e. in U, where \(\nu (x)\) is the unit normal vector to \(\mathrm{Tan}_x M\). With this notation (2.5) may be written as
for \(g\in C_c(U;{\mathbb R}^n)\). If \(h(V,\cdot )\in L^2(\Vert V\Vert )\), by approximation, (2.6) holds even for \(g\in L^2(\Vert V\Vert )\).
2.3 Weak formulation of velocity
Let \(\{M_t\}_{t\ge 0}\) be a family of smooth hypersurfaces in \(\Omega \) whose normal velocity is denoted by v. To formulate the velocity in a weak sense, observe the following characterization of v: a smooth normal vector field \(\tilde{v}\) on \(M_t\) is equal to v if and only if
holds for all \(\phi \in C_c^1(\Omega \times [0,\infty );{\mathbb R}^+)\) and for all \(t\ge 0\). Here h is the classical mean curvature vector of \(M_t\). To check this claim, after some calculation, one first sees that v satisfies (2.7) with equality. Conversely, if \(\tilde{v}\) satisfies (2.7), and already knowing that v satisfies (2.7) with equality, we obtain
for \(\phi \in C_c^1(\Omega ;{\mathbb R}^+)\). For any \(\hat{x}\in M_t\) and \(\lambda >0\), let \(\phi _{\lambda } (y):=\lambda ^{2-n}\phi (\lambda ^{-1}(y-\hat{x}))\). Substitute \(\phi _{\lambda }\) and let \(\lambda \downarrow 0\). Since \(\lambda ^{-1}(M_t-\hat{x})\rightarrow \mathrm{Tan}_{\hat{x}} M_t\), we obtain
The integration by parts shows \(\int _{\mathrm{Tan}_{\hat{x}} M_t} \nabla \phi \, d{\mathcal H}^{n-1}\perp \mathrm{Tan}_{\hat{x}} M_t\). On the other hand, one may choose this vector to be \(-(\tilde{v} (\hat{x})-v(\hat{x}))\), for example. Thus we have \(\tilde{v} (\hat{x}) =v(\hat{x})\) and we complete the proof of the claim. The characterization (2.7) motivates the following definition.
Definition 2.1
A family of varifolds \(\{V_t\}_{t\ge 0}\subset \mathbf{V}_{n-1}(\Omega )\) is a generalized solution of (1.2) if the following four conditions are satisfied.
-
(a)
\(V_t\in \mathbf{IV}_{n-1}(\Omega )\) for a.e. \(t\ge 0\).
-
(b)
For all \(T>0\),
$$\begin{aligned} \sup _{t\in [0,T]} \Vert V_t\Vert (\Omega )<\infty \ \ \text{ and } \sup _{t\in [0,T],\, B_r(x)\subset \Omega }\frac{\Vert V_t\Vert (B_r(x))}{\omega _{n-1} r^{n-1}}<\infty . \end{aligned}$$(2.8) -
(c)
For all \(T>0\),
$$\begin{aligned} \int _0^T dt \int _{\Omega } |h|^2+|u|^2 \, d\Vert V_t\Vert <\infty . \end{aligned}$$(2.9) -
(d)
For all \(\phi \in C^1_c(\Omega \times [0,\infty ) ; {\mathbb R}^+)\) and \(0\le t_1<t_2<\infty \),
$$\begin{aligned} \Vert V_{t}\Vert (\phi (\cdot ,t))\Big |_{t=t_1}^{t_2}\le \int _{t_1}^{t_2}dt\int _{\Omega } (\nabla \phi -h\phi )\cdot \{h+ (u\cdot \nu )\nu \}+\partial _t\phi \, d\Vert V_t\Vert \nonumber \\ \end{aligned}$$(2.10)holds, where we abbreviated \(h(V_t,x)\) by h.
The condition (b) may appear out of place in the definition of velocity. In fact, if u is 0 or a bounded function and if \(\Vert V_0\Vert \) satisfies (2.8), one can derive (2.8) as a consequence of (2.10) via Huisken’s monotonicity formula. However, if u is not bounded, it is not clear how to obtain (2.8) from (2.10). The other important point is that, unless one has (2.8), it is unclear how to make sense of (2.9) and (2.10). The difficulty is, \(u(\cdot ,t)\) needs to be defined as a \(\Vert V_t\Vert \) measurable function for a.e. \(t\ge 0\). In general, \(u(\cdot ,t)\) is assumed to be in some Sobolev space on \(\Omega \), and we need to define \(\Vert V_t\Vert \) measurable \(u(\cdot ,t)\) as a trace function. If we have (2.8), we may define the trace using the following inequality.
Theorem 2.1
For a Radon measure \(\mu \) on \(\mathbb {R}^n\) with \(D:= \sup _{B_r(x)\subset {\mathbb R}^n}\frac{\mu (B_r(x))}{\omega _{n-1} r^{n-1}}\) and \(1\le p <n\),
holds for \(\phi \in C^1 _c (\mathbb {R}^n)\).
See [36] and [49] for the proof in the case of \(p=1\). The above inequality for \(1< p<n\) may be derived by the Hölder and Sobolev inequalities.
Suppose that we have (2.8). We only need to define u as a function in \(L_{loc}^2(\Vert V_t\Vert \times dt)\) to make sense of (2.9) and (2.10). Since \(W^{1,p^{\prime }}_{loc}\subset W^{1,p}_{loc}\) if \(p^{\prime }>p\), we need to consider only \(1\le p<n\). Using the Hölder inequality and (2.11), we obtain (with \(D:= \sup _{B_r(x)\subset \Omega }\frac{\Vert V_t\Vert (B_r(x))}{\omega _{n-1} r^{n-1}}\))
for \(\phi \in C^1_c(\Omega )\). Here, we also need to assume that
so that \(\frac{p(n-1)}{n-p}\ge 2\). Since we will assume (2.14) in the next subsection, which implies \(p>\frac{n}{2}\) in particular, (2.13) will be relevant only for \(n=2\) and we will assume \(p\ge \frac{4}{3}\) when \(n=2\). With this restriction, we may define u as an \(L^2_{loc}(\Vert V_t\Vert \times dt)\) function on \(\Omega \times [0,T]\) uniquely as long as \(u\in L^2_{loc}([0,\infty );( W_{loc}^{1,p} (\Omega ))^n)\) by the standard density argument. The function u in (2.9) and (2.10) is defined in this sense.
2.4 Main results
First we present some existence result for (1.2) when given a vector field u and an initial hypersurface \(M_0\).
Theorem 2.2
Suppose \(n\ge 2\),
and \(\Omega ={\mathbb R}^n \text{ or } \mathbb {T}^n\). Given any
and a non-empty bounded domain \(\Omega _0 \subset \Omega \) with \(C^1\) boundary \(M_0=\partial \Omega _0\), there exist
-
(1)
a family of varifolds \(\{V_t\}_{t\ge 0}\subset \mathbf{V}_{n-1}(\Omega )\) which is a generalized solution of (1.2) as in Definition 2.1 with \(\Vert V_0\Vert ={\mathcal H}^{n-1}\lfloor _{M_0}\) and
-
(2)
a function \(\varphi \in BV _{loc} (\Omega \times [0,\infty )) \cap C^{\frac{1}{2}} _{loc} ([0,\infty );L^1 (\Omega ))\) with the following properties.
-
(2a)
\(\varphi (\cdot ,t)\) is a characteristic function for all \(t\in [0,\infty )\),
-
(2b)
\(\Vert \nabla \varphi (\cdot ,t)\Vert (\phi )\le \Vert V_t\Vert (\phi )\) for all \(t\in [0,\infty )\) and \(\phi \in C_c(\Omega ;{\mathbb R}^+)\),
-
(2c)
\(\varphi (\cdot ,0) = \chi _{\Omega _0}\) a.e. on \(\Omega \),
-
(2d)
writing \(\Vert V_t\Vert =\theta {\mathcal H}^{n-1}\lfloor _{M_t}\) and \(\Vert \nabla \varphi (\cdot ,t)\Vert ={\mathcal H}^{n-1}\lfloor _{\tilde{M}_t}\) for a.e. \(t>0\), we have
$$\begin{aligned} {\mathcal H}^{n-1}(\tilde{M}_t{\setminus } M_t)=0 \end{aligned}$$(2.16)and
$$\begin{aligned} \theta (x,t)=\left\{ \begin{array}{ll} \text{ even } \text{ integer } \ge 2 &{}\quad \text{ if } \, x\in M_t{\setminus } \tilde{M}_t, \\ \text{ odd } \text{ integer } \ge 1 &{}\quad \text{ if } \, x\in \tilde{M}_t \end{array} \right. \end{aligned}$$(2.17)for \({\mathcal H}^{n-1}\) a.e. \(x\in M_t\).
-
(2a)
-
(3)
If \(p<n\), then for any \(T>0\), setting \(s:=\frac{p(n-1)}{n-p}\), we have
$$\begin{aligned} \left( \int _0^T \left( \int _{\Omega } |u|^{s}\, d\Vert V_t\Vert \right) ^{\frac{q}{s}}\, dt\right) ^{\frac{1}{q}}<\infty . \end{aligned}$$(2.18)If \(p=n\), then we have (2.18) locally for \(U\subset \subset \Omega \) for any \(2\le s<\infty \) and if \(p>n\), then we have (2.18) with \(L^s\) norm replaced by \(C^{1-\frac{n}{p}}\) norm on \(\Omega \).
-
(4)
There exists \(T_1>0\) such that \(V_t\) has unit density for a.e. \(t\in [0,T_1)\). In addition \(\Vert \nabla \varphi (\cdot ,t) \Vert = \Vert V_t\Vert \) for a.e. \(t\in [0,T_1)\).
The condition (2.14) on u is a dimensionally sharp condition in the following sense. Consider a natural parabolic change of variables \(\tilde{x}:=\frac{x}{\lambda }\) and \(\tilde{t}:=\frac{t}{\lambda ^2}\) with \(\lambda >0\). Since u is a velocity field, it should behave just like x / t, thus it is natural to consider \(\tilde{u}:=\lambda u\). Then we have
and \(\frac{n}{p}+\frac{2}{q}-2<0\) is equivalent to the second inequality in (2.14). This guarantees that u locally behaves more like a perturbative term. In (3), if \(p>n\), then the result follows from the standard Sobolev inequality on \({\mathbb R}^n\).
To understand what \(V_t\) and \(\varphi \) are, assume for a moment that no singular behaviors occur and we have a smooth family \(\{M_t\}_{t\ge 0}\) with the velocity given by (1.2). Then we should have \(\mathrm{spt}\, \Vert V_t\Vert =\partial \{\varphi (\cdot ,t)=1\}=M_t\). Since (1.2) is stated in terms of \(V_t\), it may first appear that \(\varphi \) is redundant. However, beside the fact that \(\varphi \) is obtained naturally from the approach of the present paper, it has a few important roles. First, \(\varphi \) helps to guarantee that \(V_t\) is non-trivial. Since \(\varphi (\cdot ,t)\) is continuous in \(L^1(\Omega )\) by (2), \(\Vert \varphi (\cdot ,t)\Vert _{L^1(\Omega )}\) cannot vanish instantaneously at some arbitrary time. As long as \(\varphi (\cdot ,t)\) is not identically zero or identically 1, \(\Vert V_t\Vert \) is non-zero measure. Note that, given arbitrary \(t_0>0\), by re-defining \(V_t:= 0\) for all \(t>t_0\), we obtain another generalized solution of (1.2) due to the inequality in (2.10). Obviously, this is not a solution we would like to obtain in the end. The second role of \(\varphi \) is that it gives some restriction on the possible singularities of \(\mathrm{spt}\,\Vert V_t\Vert \). For example, consider in the \(n=2\) case. One can see that a unit density \(V_t\) cannot form a triple junction since \(\partial \{\varphi (\cdot ,t)=1\}\) cannot be a triple junction. Thus, having \(\varphi \) as an auxiliary object may be a useful tool to obtain some better regularity results. As for the actual occurrence of the higher multiplicities, Bronsard and Stoth [8] showed that one can have solution with \(\theta \ge 2\) for a limit of the Allen-Cahn equation, thus we may indeed have such solution in general.
We next state the regularity property of \(\mathrm{spt}\,\Vert V_t\Vert \), which is obtained as an application of [30, 46]. To state the result, we recall some definitions from there.
Definition 2.2
A point \(x\in \mathrm{spt}\,\Vert V_t\Vert \) is said to be a \(C^{1,\zeta }\) regular point if there exists some open neighborhood O in \({\mathbb R}^{n+1}\) containing (x, t) such that \(O\cap \cup _{s>0} (\mathrm{spt}\,\Vert V_s\Vert \times \{s\})\) is an embedded n-dimensional manifold with \(C^{1,\zeta }\) regularity in space and \(C^{(1+\zeta )/2}\) regularity in time. Similarly, we define a \(C^{2,\alpha }\) regular point by replacing the respective regularities by \(C^{2,\alpha }\) in space and \(C^{1,\alpha /2}\) in time.
Theorem 2.3
Let \(\{V_t\}_{t\ge 0}\) be as in Theorem 2.2 .
-
(1)
Suppose that there exist an open set \(U\subset \Omega \) and an interval \((t_1,t_2)\) such that \(V_t\) is unit density in U for a.e. \(t\in (t_1,t_2)\). Then for a.e. \(t\in (t_1,t_2)\), there exists a closed set \(G_t\subset U\) with \({\mathcal H}^{n-1}(G_t)=0\) such that \((U\cap \mathrm{spt}\, \Vert V_t\Vert ){\setminus } G_t\) is a set of \(C^{1,\zeta }\) regular points where \(\zeta := 2-\frac{n}{p}-\frac{2}{q}\) if \(p<n\). If \(p\ge n\), one may take any \(\zeta \) with \(0<\zeta <1-\frac{2}{q}\).
-
(2)
There exists \(T_2>0\) such that every point of \(\mathrm{spt}\, \Vert V_t\Vert \) is a \(C^{1,\zeta }\) regular point for all \(t\in (0,T_2)\) (that is, \(G_t=\emptyset \)), where \(\zeta \) is as in (1).
-
(3)
If u is Hölder continuous with exponent \(\alpha \) in the parabolic sense, i.e.,
$$\begin{aligned} \sup _{\Omega \times [0,T]}|u|+\sup _{x,y\in \Omega , 0\le t_1<t_2\le T}\frac{|u(x,t_1)-u(y,t_2)|}{\max \{ |x-y|^{\alpha }, |t_1-t_2|^{\alpha /2}\}}<\infty \end{aligned}$$for all \(0<T<\infty \), then the same results for (1) and (2) hold true with \(C^{1,\zeta }\) there replaced by \(C^{2,\alpha }\) and (1.2) is satisfied pointwise.
-
(4)
We have \(\lim _{t\downarrow 0} t^{-\frac{1}{2}} \mathrm{dist}\, (M_0, \mathrm{spt}\, \Vert V_t\Vert )=0\) and \(\mathrm{spt}\, \Vert V_t\Vert \) converges to \(M_0\) in \(C^1\) topology as \(t\downarrow 0\). Namely, given \(\varepsilon >0\) there exists a finite number of sets \(\{U_i=x_i+O_i(B_r ^{n-1}\times (-r,r))\}_{i=1}^N\), where \(O_i\) is an orthogonal rotation and \(x_i\in M_0\), such that \(M_0\subset \cup _{i=1}^N U_i\), and \(C^1\) norms of difference of graphs representing \(M_0\) and \(\mathrm{spt}\, \Vert V_t\Vert \) over \(x_i+O_i(B_r^{n-1})\) in \(U_i\) are less than \(\varepsilon \) for all sufficiently small \(t>0\).
The claim (1) says that wherever \(V_t\) is unit density in some space-time neighborhood, \(\mathrm{spt}\,\Vert V_t\Vert \) is locally a hypersurface with regularity of \(C^{1,\zeta }\) in space and \(C^{(1+\zeta )/2}\) in time, almost everywhere in space and time. We can guarantee by (2) that there is some time interval \([0,T_2)\) such that \(\mathrm{spt}\,\Vert V_t\Vert \) is a \(C^{1,\zeta }\) hypersurface. We obtain a lower bound on \(T_2\) in terms of \(M_0\) and the norm of u. On the other hand, \(T_2\) may be much larger than the lower bound and it is the time when a non-\(C^{1,\zeta }\) regular point occurs for the first time. In general, \(T_2\le T_1\) and it is plausible that some non-\(C^{1,\zeta }\) regular point first appears at \(T_2\) but \(V_t\) may remain unit density for some more time. The claim (4) shows that \(\mathrm{spt}\,\Vert V_t\Vert \) has \(C^1\) uniform regularity and convergence as \(t\downarrow 0\). As for (3), we first note that we can show the same existence results for Hölder continuous u (and not in \(L^q_{loc}([0,\infty );(W^{1,p}(\Omega ))^n)\)) as in Theorem 2.2. In fact the proof is simpler if u is bounded. \(C^{2,\alpha }\) regularity allows one to have pointwise mean curvature vector and velocity vector of \(\mathrm{spt}\, \Vert V_t\Vert \) and (1.2) is satisfied pointwise. At this point, we reach a well-defined PDE setting, and \(\mathrm{spt}\,\Vert V_t\Vert \) is as regular as what the standard parabolic regularity theory shows depending on any additional regularity assumption imposed on u.
3 Allen-Cahn equation with transport term
As stated in the introduction, the method of proof for the existence is to approximate (1.2) by the Allen-Cahn equation with an extra transport term coming from u. Throughout the paper, we assume that a function W satisfies the following:
We also define a constant
Basically, above assumptions require W to be W-shaped with non-degenerate two minima at \(\pm 1\). Requiring (3.2) may appear non-essential, but it is used essentially in deriving an upper bound for \(\xi _{\varepsilon }\) in Lemma 4.2. Any such W satisfying above can be used. The reader can take a concrete example such as \(W(s)=(1-s^2)^2\) in the following.
Given u and \(M_0\) as in Theorem 2.2, the whole scheme of the present paper is to approximate the motion law (1.2) by
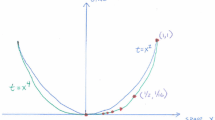
where \(\varepsilon >0\) is a small parameter tending to 0 and \(u_{\varepsilon }\) is a smooth approximation of u. For readers who are not familiar with the Allen-Cahn equation, we give a quick heuristic argument. Assume that u is smooth and that we have a family of domains \(\Omega _t\) with smooth boundaries \(M_t=\partial \Omega _t\). Let \(d(\cdot ,t)\) be the signed distance function to \(M_t\) so that \(d(\cdot ,t)>0\) inside of \(\Omega _t\). We let \(\Psi \,:\, {\mathbb R}\rightarrow (-1,1)\) be an ODE solution of \(\Psi ^{\prime \prime }=W^{\prime }(\Psi )\) with \(\lim _{x\rightarrow \pm \infty }\Psi (x)=\pm 1\). Such solution exists and we may assume \(\Psi (0)=0\). If we postulate that \(\varphi _{\varepsilon }(x,t)\approx \Psi (d(x,t)/\varepsilon )\) and \(\varphi _{\varepsilon }\) satisfies (3.5), then we expect that
Since d is a distance function, \(|\nabla d|=1\), and the last two terms cancel each other. This leaves
Due to the nature of the distance function, evaluated on \(M_t\), \(\partial _t d\) is the outward velocity of \(M_t\), \(u_{\varepsilon }\cdot \nabla d\) is the inward normal component of \(u_{\varepsilon }\) and \(\Delta d\) is the mean curvature of \(M_t\). As \(\varepsilon \rightarrow 0\), this approximation may be expected to get better, and the relation (3.7) motivates that \(\{\varphi _{\varepsilon }(\cdot ,t)=0\}\) should converge to \(M_t\) which moves by (1.2). This heuristic argument may be justified if we know in advance that there exists a smooth \(M_t\) moving by (1.2). Here, however, u is not smooth and we aim to obtain a time-global existence result which necessitates a framework inclusive of singularities. This is the reason to use the language of varifold in this paper as was done first by Ilmanen [28]. The basic approach is to prove that \(\varphi _{\varepsilon }\) satisfying (3.5) has the property that
when \(\varepsilon \) is small and where N(x, t) is some integer. At the same time we prove that the limiting measure of \(\mu ^{\varepsilon }\) satisfies (2.10). The first key estimate to be established is the analogue of (2.8) for \(\varphi _{\varepsilon }\) which will be discussed in the next section.
4 Density ratio upper bound and energy monotonicity formula
In this section, we prove the upper density ratio bound for diffused interface energy and energy monotonicity formula which are crucial in the limiting process. Estimates in this section are similar to [33, Sect. 3] with some modifications.
4.1 The upper density ratio bound
We state the main theorem concerning the uniform density ratio upper bound independent of \(\varepsilon \) of the Allen-Cahn equation with extra transport term. The proof takes the entire Sect. 4. We establish the monotonicity formula which is a perturbed version of Ilmanen’s monotonicity formula for the Allen-Cahn equation (and Huisken’s monotonicity formula for the MCF [26]) along the way.
Theorem 4.1
Suppose \(n\ge 2\), \(\Omega ={\mathbb T}^n\) or \({\mathbb R}^n\), p, q satisfy (2.14),
\(0<\varepsilon <1\) and \(\varphi \) satisfies
Assume \(u\in C^{\infty }_c(\Omega \times [0,T])\), \(\nabla ^j\varphi ,\, \partial _t\nabla ^k\varphi \in C(\Omega \times [0,T])\) for \(k\in \{0,1\}\) and \(j\in \{0,1,2,3\}\). Let \(\mu _t^{\varepsilon }\) be a Radon measure on \(\Omega \) defined by
for \(\phi \in C_c(\Omega )\) and define
Assume


and
Then there exist  and
and  such that
such that
as long as \(\varepsilon <\epsilon _1\).
Remark 4.1
If \(u=0\), \(\mu ^{\varepsilon }_t(\Omega )\) is monotone decreasing, thus it is straightforward to conclude that \(\mu ^{\varepsilon }_t(\Omega )\) is bounded uniformly independent of \(\varepsilon \) if \(\mu ^{\varepsilon }_0(\Omega )\) is. The uniform density ratio bound may be also obtained from Ilmanen’s monotonicity formula. When \(u\ne 0\), however, it is non-trivial even to conclude that the total energy \(\mu ^{\varepsilon }_t(\Omega )\) up to time T has a uniform bound independent of \(\varepsilon \). We will see that we need the density ratio bound to estimate \(\mu ^{\varepsilon }_t(\Omega )\).
4.2 Monotonicity formula
In this subsection as a first step we obtain a modified monotonicity formula analogous to that of Ilmanen [28]. It is still not a very useful formula due to the possible negative contribution coming from \(\xi _\varepsilon \) defined below. We will show that the negative contribution is small when \(\varepsilon \) is small.
To localize the computations, fix a radially symmetric cut-off function
Define
for \(t<s\) and \(x,y\in \Omega \) and define
Proposition 4.1
Suppose that \(\varphi \) satisfies (4.2). With the notation of (4.4), (4.15), (4.16) and writing \({\tilde{\rho }}={\tilde{\rho }}_{(y,s)}(x,t)\), we have  depending only on n such that
depending only on n such that

for \(y\in \Omega \), \(0<t<s<\infty \) and \(t<T\).
Proof
We define L as follows and by (4.2),
By integration by parts we have
Moreover by integration by parts we obtain
Substitution of (4.19) into (4.18) gives
We remark that \(\rho \) (without multiplication by \(\eta \)) satisfies the following:
When one computes (4.21) with \(\tilde{\rho }\) instead of \(\rho \), we have additional terms coming from differentiation of \(\eta \). The integration of these terms can be bounded by \(c \mu ^{\varepsilon } _t (B_{1/2}(y)) e^{-\frac{1}{128(s-t)}}\) for \(c=c(n)\) since \(|\nabla ^j\rho | \le c(j,n) e^{-\frac{1}{128(s-t)}}\) for any \(x,y\in \Omega \) with \(|x-y|>\frac{1}{4}\) and \(j=0,1\). Thus, with an appropriate choice of  depending only on n, we obtain (4.17). \(\square \)
depending only on n, we obtain (4.17). \(\square \)
4.3 Some estimates on \(\Omega \times [0,T]\)
Lemma 4.1
Suppose that \(\varphi \) satisfies (4.2), (4.3), (4.6), (4.7) and (4.10). Then there exists  depending only on
depending only on  such that
such that

Proof
Take any domain \(B_{3\varepsilon }(x_0)\times [t_0,t_0+2\varepsilon ^2]\subset \Omega \times [0,T]\). Define \(\tilde{\varphi }(x,t):=\varphi (\varepsilon x+x_0,\varepsilon ^2 t+t_0)\) and \(\tilde{u} (x,t):=u (\varepsilon x+x_0,\varepsilon ^2 t+t_0)\) for \((x,t)\in B_3\times [0,2]\). By (4.2) we have
Using the estimate of [32, p. 342, Theorem 9.1], if \(\partial _t v-\Delta v = f\) on \(B_2\times [0,2]\) then we have
for \(j=0\) (up to \(t=0\)) or \(j=1\) (interior estimate) and for \(r\in (1,\infty )\). Let \(\phi \in C_c ^1 (B_3)\) be a cut-off function and multiply \(\phi ^2 \tilde{\varphi }\) to (4.23), then by integration by parts, (4.6), (4.7) and (4.10), we have
Hence by (4.6), (4.7), (4.10), (4.24) (\(r=2\)) and (4.25) we obtain

By applying (4.24) to the equation
and using (4.6), (4.7) and (4.10) again, we obtain

Therefore we obtain the \(W^{1,2}\) estimates of \(\nabla \tilde{\varphi }\) on \(B_1 \times [0,2]\), and by the Sobolev inequality we have

We can use this estimate to (4.23) and (4.24) with \(r=\frac{2(n+1)}{n-1}\). We repeat this argument until r is large enough so that \( W^{1,r}\subset C^{\frac{1}{2}}\) with appropriate modifications of the domain. Then we obtain the desired estimate

Since the domain was arbitrary, after returning to the original coordinate system, we obtain (4.22). \(\square \)
Lemma 4.2
There exists  such that, if
such that, if  and under the assumptions of (4.1)–(4.3), (4.6), (4.7), (4.9) and (4.10), we have
and under the assumptions of (4.1)–(4.3), (4.6), (4.7), (4.9) and (4.10), we have
Proof
Rescale the domain by \(x\mapsto \frac{x}{\varepsilon }\) and \(t\mapsto \frac{t}{\varepsilon ^2}\). Under the change of variables, we continue to use the same notations for \(\varphi \) and u. Define
where G will be chosen later. We compute \(\partial _t \xi +\varepsilon u\cdot \nabla \xi -\Delta \xi \) and obtain
Here, we denoted and will denote \(W^{\prime }(\varphi )\) as \(W^{\prime }\), \(G(\varphi )\) as G and so forth for simplicity. Differentiate (4.23) with respect to \(x_j\), multiply \(\varphi _{x_j}\) and sum over j to obtain
By (4.23), (4.28) and (4.29) we have
Differentiating (4.27) with respect to \(x_j\) and by using the Cauchy-Schwarz inequality we have
On \(\{|\nabla \varphi |>0\}\), divide (4.31) by \(|\nabla \varphi |^2\) and substitute into (4.30) to obtain
By \(|\nabla \varphi |^2 = 2(\xi +W+G)\) and (4.32) we have on \(\{|\nabla \varphi |>0\}\)
Let \(\phi (x,t)=\phi (x) \in C^\infty (B_{3\varepsilon ^{-1}})\) be such that
and
Note that M may be bounded depending only on  by Lemma 4.1. Note also that we may assume \(M>0\) since \(M\le 0\) implies our conclusion (4.26) immediately. Let
by Lemma 4.1. Note also that we may assume \(M>0\) since \(M\le 0\) implies our conclusion (4.26) immediately. Let
where \(\gamma \) is as in (3.2). To derive a contradiction, suppose that
Since \(\tilde{\xi }\le 0\) on \( (B_{3\varepsilon ^{-1}}{\setminus } B_{2\varepsilon ^{-1}})\times [0, \varepsilon ^{-2} T]\), \(\tilde{\xi }\le \varepsilon ^{1-\beta } \) on \(B_{3\varepsilon ^{-1}} \times \{ 0 \}\) by (4.9) and \(\sup _{B_{\varepsilon ^{-1}} \times [0, \varepsilon ^{-2} T]} \tilde{\xi }\ge \varepsilon ^{\frac{1}{2}}\), there exists some interior maximum point \((x_0,t_0)\) of \(\tilde{\xi }\) where
hold. By the definition of \(\phi \) we have at the point \((x_0,t_0)\)
Substitute (4.34) into (4.33). Using \(\varepsilon \nabla u \cdot ( \nabla \varphi \otimes \nabla \varphi )\le 2\varepsilon |\nabla u|(\xi +W+G)\) and (4.10), we have
Since \(\beta <\frac{1}{2}\) and \(G^{\prime \prime }=-\varepsilon ^{\frac{1}{2}}/4\), for sufficient small \(\varepsilon \) depending only on \(\beta \) and W,
If \(|\varphi (x_0,t_0)|\le \alpha \), then
which is a ‘big’ negative number compared to the rest, and one can check that this and (4.36) (as well as \(W^{\prime }G^{\prime }\ge 0\) and \(G>0\)) lead to a contradiction in (4.35). If \(|\varphi (x_0,t_0)|\ge \alpha \), then we would have ‘big’ negative contributions coming from (all evaluated at \((x_0,t_0)\))
which again lead to a contradiction in (4.35) for sufficiently small \(\varepsilon \). This shows that
where \(G\le \varepsilon ^{\frac{1}{2}}\) is used. Now repeat the same argument, this time with M replaced by \(2\varepsilon ^{\frac{1}{2}}\) and G replaced by \(8\varepsilon ^{1-\beta } (1-\frac{1}{8} (\varphi -\gamma ) ^2)\). If we assume
\(\tilde{\xi }= \xi -\phi \) would attain some interior maximum in \(B_{3\varepsilon ^{-1}}\times [0,\varepsilon ^{-2} T]\) by (4.9) and by the subtraction of \(\phi \). This time we would have \(\partial _t \xi \ge 0, \ |\nabla \xi |\le 4\varepsilon ^{\frac{3}{2}}, \ \Delta \xi \le 4n\varepsilon ^{\frac{5}{2}}\) and \(|\nabla \varphi | ^2 \ge 4\varepsilon ^{1-\beta }\). With this (4.35) is
Exactly the same type of argument as before shows that we have a contradiction, and since \(G\le 8 \varepsilon ^{1- \beta } \) and \(\xi -G\le 2\varepsilon ^{1-\beta }\), we have (4.26). \(\square \)
Lemma 4.3
Let \(\mu _s^{\varepsilon }\), D(t) and \({\tilde{\rho }}_{(y,s)}\) be defined as in (4.4), (4.5) and (4.15). Let s, R, r be positive with \(0\le s-(\frac{R}{r})^2\le T\) and \(R\in (0,\frac{1}{2})\). Set \(\tilde{s}= s-(\frac{R}{r})^2\). Then there exists  such that, for any \(y\in \Omega \), we have
such that, for any \(y\in \Omega \), we have

Proof
First, on \(B_R (y)\) we compute
On \(\Omega {\setminus } B_R(y)\) we have
Here we used the fact that there exists \(c=c(n)>0\) such that \(l^{\frac{n-1}{2}} e^{-l}\le c e^{-\frac{l}{2}}\) for any \(l>0\). \(\square \)
4.4 Proof of Theorem 4.1
In this subsection, we always work under the assumptions of Theorem 4.1. In particular, results from the two preceding subsections are available. Furthermore, from now on until Proposition 4.2, we assume
holds for \(t\in [0,T_1]\) and \(T_1\le T\). Here, \(D_1\ge 2D_0\) is a constant depending only on  , and not on \(\varepsilon \), and which will be determined after Proposition 4.2. We need to be careful about the dependence of constants so that we do not end up a circular argument. Any constant depending on \(D_1\) will be again a constant depending on
, and not on \(\varepsilon \), and which will be determined after Proposition 4.2. We need to be careful about the dependence of constants so that we do not end up a circular argument. Any constant depending on \(D_1\) will be again a constant depending on  . Note that such \(T_1>0\) exists because \(D_1>D_0\) and by the continuity of D(t) in time. Such continuity follows from that of \(\varphi \) in the case of \(\Omega ={\mathbb T}^n\), and additionally from (4.8) in the case of \(\Omega ={\mathbb R}^n\). \(T_1\) may depend on \(\varepsilon \) in general, but in the end, we prove that \(T_1=T\) as long as \(\varepsilon \) is sufficiently small. First, under this assumption we have the following a-priori estimate:
. Note that such \(T_1>0\) exists because \(D_1>D_0\) and by the continuity of D(t) in time. Such continuity follows from that of \(\varphi \) in the case of \(\Omega ={\mathbb T}^n\), and additionally from (4.8) in the case of \(\Omega ={\mathbb R}^n\). \(T_1\) may depend on \(\varepsilon \) in general, but in the end, we prove that \(T_1=T\) as long as \(\varepsilon \) is sufficiently small. First, under this assumption we have the following a-priori estimate:
Lemma 4.4
There exists  depending only on n, p, q such that for any \(0\le t_0<t_1\) we have
depending only on n, p, q such that for any \(0\le t_0<t_1\) we have

In particular, there exists \(E_0\) depending only on  such that
such that
Proof
By (4.2) we can compute
To estimate the last term of (4.41), we consider two cases \(p<2\) and \(p\ge 2\) separately. In addition we consider \(\Omega ={\mathbb T}^n,\,{\mathbb R}^n\) separately, and let us consider \({\mathbb T}^n\) first. Let \(\{\psi _{\alpha }\}_{\alpha }\) be a partition of unity on \(\Omega \) such that \(\psi _{\alpha }\in C^{\infty }_c(\Omega )\), \(\mathrm{diam}\,(\mathrm{spt}\,\psi _{\alpha })\le 1/2\) and \(\Vert \psi _{\alpha }\Vert _{C^2}\le c(n)\). Consider \(p<2\) case first. Just as in (2.12), by setting \(s:= \frac{p(n-1)}{n-p}\ge 2\), we have
where each constant is different. We used the local finiteness of \(\{\psi _{\alpha }\}_{\alpha }\) and \(\sum _{\alpha } A_{\alpha }^{\frac{s}{p}}\le (\sum _{\alpha } A_{\alpha })^{\frac{s}{p}}\) since \(\frac{s}{p}\ge 1\). For \(p\ge 2\), we have
Here we used (2.11) with \(p=1\) there and \(\phi =|\psi _{\alpha } u|^p\). Integration of (4.39) over \([t_0,t_1]\) using (4.42) or (4.43) gives (4.39). We define \(E_0\) to be  . In case of \(\Omega ={\mathbb R}^n\), we do not need to take the partition of unity and the proof proceeds similarly. \(\square \)
. In case of \(\Omega ={\mathbb R}^n\), we do not need to take the partition of unity and the proof proceeds similarly. \(\square \)
In the following we define \(\beta ^{\prime }\) by
In fact, any number \(\beta ^{\prime }\in (\beta ,1)\) can be used. To fix the idea, we specify such \(\beta ^{\prime }\), and suppose that \(\beta ^{\prime }\) depends on \(\beta \) for simplicity.
Lemma 4.5
There exist  ,
,  and
and  with
with  depending only on
depending only on  and \(D_0\) with the following property. Assume
and \(D_0\) with the following property. Assume  and \(|\varphi (y,s)|\le \alpha <1\) with \(s\in (0,T_1]\). Here \(\alpha \) is from (3.3). Then for any \(t\in [0,T_1 ]\) with \(\max \{ 0,s-2\varepsilon ^{2\beta \prime } \} \le t \le s \) we have
and \(|\varphi (y,s)|\le \alpha <1\) with \(s\in (0,T_1]\). Here \(\alpha \) is from (3.3). Then for any \(t\in [0,T_1 ]\) with \(\max \{ 0,s-2\varepsilon ^{2\beta \prime } \} \le t \le s \) we have

where  .
.
Proof
We will choose  and assume for the moment that
and assume for the moment that  . Set \(\tilde{\rho }= \tilde{\rho }_{(y,s+\varepsilon ^2)} (x,t)\) in this proof. Assume \(|\varphi (y,s)| \le \alpha <1 \). We have
. Set \(\tilde{\rho }= \tilde{\rho }_{(y,s+\varepsilon ^2)} (x,t)\) in this proof. Assume \(|\varphi (y,s)| \le \alpha <1 \). We have
where \(\tilde{\varphi }(\tilde{x},s ) = \varphi (\varepsilon \tilde{x} +y ,s)\). By \(|\tilde{\varphi }(0,s)| \le \alpha <1\) and Lemma 4.1 there exists  such that
such that

From (4.10), (4.17), (4.26), (4.40) and  we have for \(\lambda \in [t,s )\)
we have for \(\lambda \in [t,s )\)

Here \(\int _{\Omega } \tilde{\rho }\, dx\le \sqrt{4\pi (s-t)}\) is used. Multiply (4.46) by \(e^{ \varepsilon ^{-2 \beta }(s-\lambda )}\) and integrate over [t, s]. By \(t\ge \max \{0,s-2\varepsilon ^{2\beta ^{\prime }}\}\) we have

By (4.45) and (4.47) for sufficiently small \(\varepsilon \) depending only on \(D_1,\beta ,n\) and  we have
we have

Next we use Lemma with  , where we may assume that
, where we may assume that  and
and  . We chose this r so that
. We chose this r so that

In Lemma , we replace s and \(s-(\frac{R}{r})^2\) by \(s+\varepsilon ^2\) and t respectively. Remark that \(R:= r (s+\varepsilon ^2 -t )^{\frac{1}{2}}\le r(\varepsilon ^2 +2 \varepsilon ^{2\beta \prime })^{\frac{1}{2}}\) since \(s-t\le 2\varepsilon ^{2\beta \prime }\). Hence we have \(R< \frac{1}{2}\) by restricting \(\varepsilon \) depending only on  and
and  . From (4.38), (4.40) and Lemma we have
. From (4.38), (4.40) and Lemma we have

Note that \(r/R\ge \varepsilon ^{-\beta ^{\prime }}/\sqrt{3}\). By (4.50), (4.48) and (4.49) for sufficiently small \(\varepsilon \) we obtain

Set  and
and  and we have the desired estimate (4.44). Note that the restriction on \(\varepsilon \) depends on
and we have the desired estimate (4.44). Note that the restriction on \(\varepsilon \) depends on  ,
,  , \(D_1\),
, \(D_1\),  . Examining the dependence, we may conclude the proof. \(\square \)
. Examining the dependence, we may conclude the proof. \(\square \)
Lemma 4.6
There exists  and
and  depending only on n,
depending only on n,  ,
,  , p, q, T, W, \(\beta \) and \(D_0\) with the following property. For any \(r\in (\varepsilon ^{\beta \prime } , \frac{1}{2})\) and \(t\in [2\varepsilon ^{2\beta \prime } ,T]\cap [0,T_1]\), we have
, p, q, T, W, \(\beta \) and \(D_0\) with the following property. For any \(r\in (\varepsilon ^{\beta \prime } , \frac{1}{2})\) and \(t\in [2\varepsilon ^{2\beta \prime } ,T]\cap [0,T_1]\), we have

provided  .
.
Proof
We only need to prove the claim when \(T_1\ge 2\varepsilon ^{2\beta \prime }\) since the claim is vacuously true otherwise. Let \(y\in \Omega \), \(r\in (\varepsilon ^{\beta \prime },\frac{1}{2})\) and \(t_*\in [2\varepsilon ^{2\beta \prime },T]\cap [0,T_1 ]\) be arbitrary and fixed. We define

By Vitali’s covering theorem applied to  , there exists a set of pairwise disjoint balls
, there exists a set of pairwise disjoint balls  such that
such that

By the definition of \(\tilde{A}\), for each \(x_i\) there exists \( \tilde{t}_i\) such that
Define \(\hat{t}:=t_*-2\varepsilon ^{2\beta \prime }\). Since \(t_*\ge 2\varepsilon ^{2\beta \prime }\), we have \(\hat{t}\ge 0\). By (4.53),
and the assumption of Lemma 4.5 is satisfied for \(s=\tilde{t}_i , \ y= x_i , \ t=\hat{t}\) and  if
if  . Hence we may conclude that
. Hence we may conclude that

By (4.54), we have  , which shows
, which shows

from (4.55) with  . Since
. Since  are pairwise disjoint and
are pairwise disjoint and  , (4.56) gives
, (4.56) gives

Hence the n-dimensional volume of A is estimated by (4.52) and (4.57)

By (4.38) and \(r\ge \varepsilon ^{\beta \prime }\),

where  . Hence by (4.26) and (4.58)
. Hence by (4.26) and (4.58)

Next we estimate the surface energy on the complement of A which decays very quickly. Define \(\phi \in \text {Lip} (B_{2r} (y)) \) such that
By \(r\ge \varepsilon ^{\beta \prime }\),  and the definitions of \(\tilde{A}\) and \(\phi \), we have \({\mathrm{spt}} \phi \cap {\tilde{A}} =\emptyset \), hence
and the definitions of \(\tilde{A}\) and \(\phi \), we have \({\mathrm{spt}} \phi \cap {\tilde{A}} =\emptyset \), hence
For each j differentiate the Eq. (4.2) with respect to \(x_j\), multiply \(\phi ^2 \frac{\partial \varphi }{\partial x_j}\), sum over j and integrate to obtain
By integration by parts and the Cauchy-Schwarz inequality (4.61) gives
By (4.60), \(W^{\prime \prime }(\varphi )\ge \kappa \) on \(\mathrm{spt}\phi \) for \(t\in [t_*-\varepsilon ^{2\beta \prime } ,t_*]\). By (4.10) and the definition of \(\phi \), (4.62) gives
for small \(\varepsilon \). By integrating (4.63) over \([t_*-\varepsilon ^{2\beta \prime },t_*]\), we obtain
Define
By (4.64) we have
By \(\mathrm{spt}\phi \subset \mathrm{B}_{\mathrm{2r}}(\mathrm{y})\) and (4.38)
Since \(B_r (y){\setminus } A \subset \{ \phi =1 \} \), we have
Recall that \(\beta ^{\prime }<1\). By (4.65)–(4.67), we obtain for sufficiently small \(\varepsilon \) (depending only on \(\kappa \))
By (4.59) and (4.68), and since \(\beta ^{\prime }-\beta =\frac{1-\beta }{2} < 2-2\beta ^{\prime }=1-\beta \), we obtain (4.51) with an appropriate choice of  . \(\square \)
. \(\square \)
Later in Sect. 7, we use the following estimate which follows from Lemma 4.6.
Corollary 4.1
For any \(0<r<\frac{1}{2}\),  and \(t\in [2\varepsilon ^{2\beta \prime },T]\cap [0,T_1]\), we have
and \(t\in [2\varepsilon ^{2\beta \prime },T]\cap [0,T_1]\), we have

Proof
For the integration over the range \(\tau \in (0,\varepsilon ^{\beta \prime })\), we simply use the estimate (4.26). For the range \(\tau \in (\varepsilon ^{\beta \prime },r)\), we use (4.51). \(\square \)
Lemma 4.7
There exists a constant  depending only on n,
depending only on n,  ,
,  , p, q, T, \(D_0\), W, \(\beta \) such that for
, p, q, T, \(D_0\), W, \(\beta \) such that for  , \(t\in [0,T_1 ]\) and \(t<s\), we have
, \(t\in [0,T_1 ]\) and \(t<s\), we have

Proof
If \(t\le 2\varepsilon ^{2\beta '}\) then by using (4.26) and \(\int \rho \, dx =\sqrt{4\pi (s-\lambda )}\) we have
By the similar argument, if \(s>t\ge s-2\varepsilon ^{2\beta '}\) then we have
Hence we only need to estimate integral over \([2\varepsilon ^{2\beta '},t]\) with \(t\le s-2\varepsilon ^{2\beta '}\). First we estimate on \(B_{\varepsilon ^{\beta '}} (y)\). We compute using (4.26) and \(s-t\ge 2\varepsilon ^{2\beta '}\) that
On \(\Omega \setminus B_{\varepsilon ^{\beta '} }(y) \), by (4.51), \(s-t \ge 2\varepsilon ^{2\beta '}\) and computations similar to (4.37), we have

By (4.71)–(4.74) we obtain the desired estimate. \(\square \)
To utilize the formula (4.17), we next obtain the estimate for u.
Lemma 4.8
There exists  depending only on n, p and q such that for any \(t_0, t_1\) with \(s>t_1>t_0 \ge 0\) we have
depending only on n, p and q such that for any \(t_0, t_1\) with \(s>t_1>t_0 \ge 0\) we have

where (1) \(0<\hat{p}=\frac{2pq -2p-nq}{pq} \) when \(p<n\), (2) \(\hat{p}<\frac{q-2}{q}\) may be taken arbitrarily close to \(\frac{q-2}{q}\) when \(p=n\) (and  depends on \(\hat{p})\), and (3) \(\hat{p}=\frac{q-2}{q}\) when \(p>n\).
depends on \(\hat{p})\), and (3) \(\hat{p}=\frac{q-2}{q}\) when \(p>n\).
Proof
First, consider the case \(p<n\). By the Hölder inequality, for \(l:=\frac{p(n-1)}{2(n-p)}\) (which is \(\ge 1\) due to (2.13)) we have

where  . Hence by the Hölder inequality and (4.77) we obtain (with \(\Vert u\Vert := \Vert u\Vert _{L^{q}([t_0,t_1];(W^{1,p}(B_{\frac{1}{2}}(y))^n)}\))
. Hence by the Hölder inequality and (4.77) we obtain (with \(\Vert u\Vert := \Vert u\Vert _{L^{q}([t_0,t_1];(W^{1,p}(B_{\frac{1}{2}}(y))^n)}\))

We remark that \((s-t_0)^\iota - (s-t_1)^\iota \le (t_1-t_0)^\iota \) for \(\iota \in (0,1)\) and \( \frac{-(n-p)q}{p(q-2)} +1 \in (0,1)\). By setting  , we obtain the desired estimate when \(p<n\). For \(p=n\), since \(W^{1,n}_{loc} \subset W^{1,p^{\prime }}_{loc}\) for \(p^{\prime }<n\), we repeat the same argument as above for p close to n. Note that \(\frac{2pq-2p-nq}{pq} \uparrow \frac{q-2}{q}\) as \(p\uparrow n\). This gives the estimate for \(p=n\) case. For \(p>n\), \(\sup _{B_{\frac{1}{2}}(y)}|\eta ^{\frac{1}{2}}u|\le c(n,p)\Vert u\Vert _{W^{1,p}(B_{\frac{1}{2}}(y))}\). Thus \(\int \tilde{\rho }|u|^2\, d\mu _t^{\varepsilon } \le c(n,p)D(t) \Vert u\Vert _{W^{1,p}(B_{\frac{1}{2}}(y))}^2\). This gives the desired estimate for \(p>n\). \(\square \)
, we obtain the desired estimate when \(p<n\). For \(p=n\), since \(W^{1,n}_{loc} \subset W^{1,p^{\prime }}_{loc}\) for \(p^{\prime }<n\), we repeat the same argument as above for p close to n. Note that \(\frac{2pq-2p-nq}{pq} \uparrow \frac{q-2}{q}\) as \(p\uparrow n\). This gives the estimate for \(p=n\) case. For \(p>n\), \(\sup _{B_{\frac{1}{2}}(y)}|\eta ^{\frac{1}{2}}u|\le c(n,p)\Vert u\Vert _{W^{1,p}(B_{\frac{1}{2}}(y))}\). Thus \(\int \tilde{\rho }|u|^2\, d\mu _t^{\varepsilon } \le c(n,p)D(t) \Vert u\Vert _{W^{1,p}(B_{\frac{1}{2}}(y))}^2\). This gives the desired estimate for \(p>n\). \(\square \)
Proposition 4.2
There exist  depending only on n,
depending only on n,  depending only on \(n,\,p,\,q\) and
depending only on \(n,\,p,\,q\) and  depending only on
depending only on  with the following property. For \(t_0, t_1\) with \(T_1 \ge t_1 >t_0 \ge 0\) and \(t_1-t_0\le 1\), suppose
with the following property. For \(t_0, t_1\) with \(T_1 \ge t_1 >t_0 \ge 0\) and \(t_1-t_0\le 1\), suppose  and
and  . Then, if
. Then, if  , we have
, we have

where \(\hat{p}\) is as in Lemma 4.8.
Proof
First, for any \(s>t_0\), by direct computation and by the definition of \(D(t_0)\), we have
Let  be a constant defined by
be a constant defined by

By definition,  depends only on n. Suppose that \(t_1\) satisfies the assumptions. Recalling the definition of \(D(t_1)\), we have the following three possibilities, (a) \(D(t_1)=\mu _{t_1}^{\varepsilon }(\Omega )\), (b) there exists \(B_r(y)\subset \Omega \) such that \(D(t_1)=\frac{1}{\omega _{n-1} r^{n-1}} \mu ^{\varepsilon } _{t_1} (B_r (y))\) and \(r\ge \frac{1}{4}\), and (c) the same as (b) except that \(r<\frac{1}{4}\). For (b), we have the following
depends only on n. Suppose that \(t_1\) satisfies the assumptions. Recalling the definition of \(D(t_1)\), we have the following three possibilities, (a) \(D(t_1)=\mu _{t_1}^{\varepsilon }(\Omega )\), (b) there exists \(B_r(y)\subset \Omega \) such that \(D(t_1)=\frac{1}{\omega _{n-1} r^{n-1}} \mu ^{\varepsilon } _{t_1} (B_r (y))\) and \(r\ge \frac{1}{4}\), and (c) the same as (b) except that \(r<\frac{1}{4}\). For (b), we have the following
Since \(\omega _{n-1}/4^{n-1}\le 1\), either (a) or (b), we have
Then, by (4.39), we obtain with (4.81) that

where \(\Vert u\Vert :=\Vert u\Vert _{L^q([t_0,t_1];(W^{1,p}(\Omega ))^n)}\). By (4.80),  , thus (4.82) shows
, thus (4.82) shows

This is the conclusion deduced from (a) and (b). Next consider the case (c). Let \(s=t_1 +r^2\). By (4.17), (4.70), (4.75) and (4.39), we have

We compute using \(\eta =1\) on \(B_{\frac{1}{4}}(y)\) and \(r\le \frac{1}{4}\) that

where \(s=t_1+r^2\), the properties of \(t_1\) and  are used. By (4.79), (4.84) and (4.85) give (using also \(t_1-t_0\le 1\))
are used. By (4.79), (4.84) and (4.85) give (using also \(t_1-t_0\le 1\))

Since \(D(t_0)\ge 1\) by definition, we may restrict \(\varepsilon \) depending on  (see Lemma 4.7) so that
(see Lemma 4.7) so that  , for example. Now, examining the dependence of constants, we obtain (4.78) from (4.83) and (4.86) by choosing an appropriate
, for example. Now, examining the dependence of constants, we obtain (4.78) from (4.83) and (4.86) by choosing an appropriate  . Here we also use \(\hat{p}< 2-\frac{2}{q}\) and \(t_1-t_0\le 1\). \(\square \)
. Here we also use \(\hat{p}< 2-\frac{2}{q}\) and \(t_1-t_0\le 1\). \(\square \)
Proof of Theorem 4.1
We first choose \(0<T_b\le 1\) so that

holds. Due to the dependence of  , \(T_b\) depends only on
, \(T_b\) depends only on  . Then set
. Then set

so that \(D_1\) depends only on  . Finally restrict
. Finally restrict  as in Proposition 4.2. Now we claim that
as in Proposition 4.2. Now we claim that

holds for all \(t\in [0,T]\), thus proving \(D(t)\le D_1\) for all \(t\in [0,T]\) and \(T_1=T\). Suppose there exists \(0<t\le T\) such that (4.89) fails. Then there must exist some \(0<T_1<T\) such that  for all \(t\in [0,T_1]\) and
for all \(t\in [0,T_1]\) and  . Note that \(D(t)\le D_1\) for \(t\in [0,T_1]\), satisfying (4.38). If \(T_1<T_b\), we apply Proposition 4.2 with \(t_0=0\) and \(t_1=T_1\). We have
. Note that \(D(t)\le D_1\) for \(t\in [0,T_1]\), satisfying (4.38). If \(T_1<T_b\), we apply Proposition 4.2 with \(t_0=0\) and \(t_1=T_1\). We have  and
and  . Thus (4.78) shows
. Thus (4.78) shows

but this contradicts \(T_1<T_b\) and (4.87). Thus, we have \(T_1\ge T_b\). If \(T_1\in [T_b,2T_b)\), then  . Thus there must exist \(t_0\in [T_b,T_1)\) such that
. Thus there must exist \(t_0\in [T_b,T_1)\) such that  and \(T_1-t_0<T_b\) (note that
and \(T_1-t_0<T_b\) (note that  for all \(t\in [0,T_b)\)). By Proposition 4.2 with \(t_1=T_1\), we have
for all \(t\in [0,T_b)\)). By Proposition 4.2 with \(t_1=T_1\), we have  , again contradicting \(T_1-t_0<T_b\) and (4.87). Continuing this manner, we conclude that \(T_1=T\), which is a contradiction. Thus we proved that (4.89) holds for all \(t\in [0,T]\). Also this concludes the proof of Theorem 4.1. \(\square \)
, again contradicting \(T_1-t_0<T_b\) and (4.87). Continuing this manner, we conclude that \(T_1=T\), which is a contradiction. Thus we proved that (4.89) holds for all \(t\in [0,T]\). Also this concludes the proof of Theorem 4.1. \(\square \)
Since we proved \(T=T_1\), i.e., the assumption (4.38) is true for all [0, T], all the estimates in this section hold with \(T_1\) replaced by T. In particular, we have the following monotonicity formula which follows from (4.17), (4.75) and (4.70).
Theorem 4.2
Under the same assumptions of Theorem 4.1, if \(\varepsilon <\epsilon _1\) and for \(s>t_1>t_0\), \(t_0, t_1\in [0,T]\), and \(y\in \Omega \) we have

where \(\tilde{\rho }=\tilde{\rho }_{(y,s)}(x,t)\) and \(\xi _{\varepsilon }\) are defined as in (4.15) and (4.16), and \(\hat{p}\) is as in Lemma 4.8.
The point of the right-hand side is that it is bounded independent of \(\varepsilon \), and it can be made arbitrarily small when \(\varepsilon \rightarrow 0\) and \(t_0 \rightarrow t_1\).
5 Existence of limit measures
In this section we construct a sequence of approximate diffused interface solution for (1.2), given any bounded hypersurface \(M_0=\partial \Omega _0\) which is \(C^1\), and any vector field u satisfying (2.15). We then prove that we may extract a subsequence which converges to a family of Radon measures \(\{\mu _t\}_{t\ge 0}\).
We first construct a convergent sequence of domains \(\Omega _0^i\) with \(C^{\infty }\) boundary \(M_0^i\) which converges in \(C^1\) topology. This can be carried out by locally representing \(M_0\) by a \(C^1\) graph and by some suitable mollification. Let \(d_i\) be the signed distance function to \(M_0^i\) which is positive inside of \(\Omega _0^i\), and which is smooth in some \(r_i\)-neighborhood of \(M_0^i\). Let \(h_i\in C^{\infty }({\mathbb R})\) be a monotone increasing function such that \(h_i(s)=s\) for \(0\le s\le r_i/3\), \(h_i(s)=r_i/2\) for \(s>2r_i/3\), \(h_i^{\prime }(s)\le 1\) for \(s>0\) and \(h_i(s)=-h_i(-s)\) for \(s<0\). Then define \(\tilde{d}_i(x):=h_i(d_i(x))\) for \(x\in \Omega \). We next choose a sequence of \(\varepsilon _i>0\) so that
We define the initial data \((\varphi _{\varepsilon _i})\) differently depending on \(\Omega ={\mathbb T}^n\) or \({\mathbb R}^n\) as follows.
For \(\Omega ={\mathbb T}^n\), we define
Here and in the following, \(\Psi \) is the solution for \(\Psi ^{\prime \prime }=W^{\prime }(\Psi )\) (and \(\Psi ^{\prime }=\sqrt{2W(\Psi )}\)) with \(\Psi (0)=0\). For \(\Omega ={\mathbb R}^n\), we will truncate the function to be \(-1\) outside of a compact set as follows. Due to the definition, note that for \(x\in {\mathbb R}^n\) with \(\mathrm{dist}(x,\Omega _0^i)\ge 2r_i/3\), we have \({\tilde{d}}_i(x)=-r_i/2\). Choose a sufficiently large \(R>0\) such that
for all i. Then we have \({\tilde{d}}_i(x)=-r_i/2\) on \({\mathbb R}^n{\setminus } B_R\). Let \(g:{\mathbb R}^+\rightarrow [0,1]\) be a smooth decreasing function such that \(g(r)=1\) for \(0\le r\le R\), \(g(r)=0\) for \(R+1\le r<\infty \) and \(|g^{\prime }|\le 2\). Define
Then \((\varphi _{\varepsilon _i})_0(x)=\Psi \left( \frac{{\tilde{d}}_i(x)}{\varepsilon _i}\right) \) on \(B_R\), and it smoothly changes from \(\Psi (-r_i/2\varepsilon _i)\) to \(-1\) as |x| increases from R to \(R+1\). We may show from \(\Psi ^{\prime }=\sqrt{2W(\Psi )}\) that \(0<\Psi (-r_i/2\varepsilon _i)+1\le c \exp (-c^{\prime }r_i/\varepsilon _i)\) for some positive constants \(c,c^{\prime }\) depending only on W. Thus the difference between \((\varphi _{\varepsilon _i})_0\) and \(-1\) is exponentially small on \(B_{R+1}{\setminus } B_R\) by (5.1), and \((\varphi _{\varepsilon _i})_0(x)=-1\) on \({\mathbb R}^n {\setminus } B_{R+1}\).
For both cases, one can check that (4.7) is satisfied for \((\varphi _{\varepsilon _i})_0\) with some i-independent  , where we may need to take a smaller \(\varepsilon _i\) depending on the growth of \(C^3\) norm of the graph functions representing \(M_0^i\). We fix \(\beta \)
, where we may need to take a smaller \(\varepsilon _i\) depending on the growth of \(C^3\) norm of the graph functions representing \(M_0^i\). We fix \(\beta \)
though any \(0<\beta <1/2\) can be chosen. Using the fact that \(\Psi \) solves \(\Psi ^{\prime }=\sqrt{2W(\Psi )}\) and \(|\nabla \tilde{d}_i|\le 1\), one can check that (4.9) is satisfied for all i. We may also assume that
where the second identity is in the sense of measure convergence. We may also assume, due to the assumption that \(M_0\) is \(C^1\), that we have some \(D_0\) depending on \(M_0 \) such that D(0) as in (4.5) corresponding to \((\varphi _{\varepsilon _i})_0\) is uniformly bounded by \(D_0\) independent of i.
We next let \(T_i=i\) so that \(\lim _{i\rightarrow \infty }T_i=\infty \), and let \(\{u_{i}\}_{i=1}^{\infty }\) be a sequence of \(C^{\infty }\) vector fields with compact support such that \( \Vert u_{i}-u\Vert _{L^q([0,T_i];(W^{1,p}(\Omega ))^n)}\rightarrow 0\) as \(i\rightarrow \infty \), which can be constructed by the standard density argument. Then for each i we associate j(i) so that (4.10) is satisfied, i.e.,
for all i, and at the same time, \(\varepsilon _{j(i)}<\epsilon _1\) where \(\epsilon _1\) is determined by Theorem 4.1 corresponding to \(D_0\), \(T=T_i\) and  . We relabel \(\varepsilon _{j(i)}\) as \(\varepsilon _i\) and \(u_{i}\) as \(u_{\varepsilon _i}\).
. We relabel \(\varepsilon _{j(i)}\) as \(\varepsilon _i\) and \(u_{i}\) as \(u_{\varepsilon _i}\).
With these choices, for each \(i\in {\mathbb N}\), we solve (4.2) and (4.3) on \(\Omega \times [0,T_i]\) with initial data \((\varphi _{\varepsilon _i})_0\) and u replaced by \(u_{\varepsilon _i}\). For \(\Omega ={\mathbb T}^n\), the standard parabolic PDE theory shows the existence of classical solution which we denote \(\varphi _{\varepsilon _i}\). The maximum principle shows (4.6). Due to the choice of \(\varepsilon _i\), for each fixed \(T>0\), we have all the assumptions of Theorem 4.1 satisfied on [0, T] for all sufficiently large i, thus we have (4.13). The same can be said about Theorem 4.2. For \(\Omega ={\mathbb R}^n\) and for each fixed i, we construct the solution by domain approximation. Namely, for each \(k\in {\mathbb N}\) with \(k>3R\) (where R is defined in (5.3)), solve
By the standard parabolic existence theory, there exists a classical solution which we denote by \(\varphi _{\varepsilon _i,k}\). By the maximum principle, we have \(-1\le \varphi _{\varepsilon _i,k}<1\). We claim that
for all k by the maximum principle. To see this, on \(\partial B_k\times [0,T_i]\), we have \(\varphi _{\varepsilon _i,k}(x,t)=-1<\psi _{\varepsilon _i}(x,t)\) by (5.8) and (5.9). On \(B_k\times \{0\}\) where \(\varphi _{\varepsilon _i,k}=(\varphi _{\varepsilon _i})_0\), we may check \(\psi _{\varepsilon _i}>(\varphi _{\varepsilon _i})_0\) as follows. When \(|x|\ge R+1\), \(\psi _{\varepsilon _i}(x,0)>-1=(\varphi _{\varepsilon _i})_0(x)\), and when \(R\le |x|\le R+1\), \((\varphi _{\varepsilon _i})_0(x)\approx -1<\Psi (0)<\psi _{\varepsilon _i}(x,0)\). When \(|x|< R\),
since \(|{\tilde{d}}_i(x)|\le |d_i(x)|< 2R\) from \(M_0^i\subset B_R\). \(\psi _{\varepsilon _i}\) is a super-solution since, for \(|x|\ne 0\),
We note that \(\varphi _{\varepsilon _i,k}\) cannot touch \(\psi _{\varepsilon _i}\) from below at \(|x|=0\). Thus we may prove (5.9) by the standard argument of the maximum principle. Now let \(k\rightarrow \infty \) and we may prove that \(\varphi _{\varepsilon _i,k}\) converge to a solution \(\varphi _{\varepsilon _i}\) of (4.2) on \({\mathbb R}^n\times [0,T_i]\) satisfying \(-1\le \varphi _{\varepsilon _i}\le \psi _{\varepsilon _i}\). Hence, we have (4.6). Due to (5.9), for each fixed i, we have the exponential approach of \(\varphi _{\varepsilon _i}\) to \(-1\) as \(|x|\rightarrow \infty \), which is (4.8). Thus, in the case of \(\Omega ={\mathbb R}^n\), we have all the assumptions of Theorem 4.1 satisfied and we may obtain the desired conclusion.
We next prove that there exists a family of Radon measures \(\{\mu _t \}_{t\ge 0}\) such that, after choosing a subsequence, \(\mu _t ^{\varepsilon _{i_j}} \rightarrow \mu _t \) as \(j\rightarrow \infty \) for all \(t\ge 0\).
Proposition 5.1
Corresponding to \(T>0\) and \(\phi \in C_c^2 (\Omega ; \mathbb {R}^+)\), there exists  depending only on
depending only on  and \(\Vert \phi \Vert _{C^2(\Omega )}\) such that, for all i with \(i>T\) and \(\mu ^{\varepsilon _i}_t\) constructed as above, the function
and \(\Vert \phi \Vert _{C^2(\Omega )}\) such that, for all i with \(i>T\) and \(\mu ^{\varepsilon _i}_t\) constructed as above, the function

of t is monotone decreasing on [0, T].
Proof
By (4.2) and integration by parts we have
By the Cauchy-Schwarz inequality and estimating as in the proof of Lemma 4.4, we have
Thus with a suitable constant independent of i and Theorem 4.1, we have (5.10). \(\square \)
Proposition 5.2
(See [28, 33]) There exist a family of Radon measures \(\{\mu _t\}_{t\ge 0}\) and a subsequence (denoted by the same index) such that for all \(t\ge 0\),
Proof
Fix \(T>0\) and \(\phi \in C_c^2 (\Omega ; \mathbb {R}^+)\). By the Cauchy-Schwarz inequality and \(q>2\),
for \(0\le t_1<t_2\le T\). Hence the last term of (5.10) is uniformly bounded in Hölder continuous norm with exponent \(\frac{q-2}{q}\). Thus by the Ascoli-Arzelà compactness theorem, there exists a subsequence which converges uniformly on [0, T]. By the monotone decreasing property due to Proposition 5.1, we can choose a subsequence such that \(\mu ^{\varepsilon _i} _{t} (\phi )\) converges on a co-countable set \(B(\phi )\subset [0,T]\). Choose a countable set \(\{\phi _k \}_{k=1} ^\infty \subset C_c^2 (\Omega ; \mathbb {R} ^+)\) which is dense in \(C_c(\Omega ;\mathbb {R}^+)\). By the similar argument we can choose a subsequence such that \(\mu _t ^{\varepsilon _i} (\phi _k )\) converges on a co-countable set \(B=\cap _{k=1} ^\infty B(\phi _k)\). For any \(k\ge 1\) we define \(\mu _t (\phi _k)= \lim _{i\rightarrow \infty } \mu _t ^{\varepsilon _i} (\phi _k)\) for \(t\in B\). Then we may define \(\mu _t (\phi )= \lim _{i\rightarrow \infty } \mu _t ^{\varepsilon _i} (\phi )\) for any \(\phi \in C_c(\Omega ;\mathbb {R}^+)\) and for any \(t\in B\) since \(\{\phi _k \}_{k=1} ^\infty \) is dense in \(C_c(\Omega ;\mathbb {R}^+)\) and the measures are uniformly bounded. Since \([0,T]{\setminus } B\) is countable, we can choose a subsequence so that \(\mu _t ^{\varepsilon _i} (\phi _k)\) converges on \([0,T]{\setminus } B\) for any k. Thus we have the limit \(\mu _t (\phi )\) for all \(\phi \in C_c(\Omega ; \mathbb {R}^+) \) and for all \(t\in [0,T]\). Now by letting \(T\rightarrow \infty \) and by diagonal argument, we may choose a subsequence so that \(\mu _t^{\varepsilon _i}(\phi )\) converges for all \(t\ge 0\) and \(\phi \in C_c(\Omega ; \mathbb {R}^+)\). \(\square \)
We also denote, after choosing a further subsequence,
Definition 5.1
Let \(\mu \) be a measure on \(\Omega \times [0,\infty )\) such that \(d\mu =\lim _{j\rightarrow \infty }d\mu _{t}^{\varepsilon _j}dt\) locally as measures.
Since \(\sup _{t\in [0,T]}\mu _t^{\varepsilon _j}(\Omega )\) is bounded uniformly in j for all T, the dominated convergence theorem shows \(d\mu =d\mu _t\, dt\). On the other hand, note that \(\mathrm{spt}\mu \) may not be the same as \(\cup _{t\ge 0}\mathrm{spt}\mu _\mathrm{t}\times \{\mathrm{t}\}\). In the following section we also use the following notation.
Definition 5.2
Define \((\mathrm{spt}\mu )_\mathrm{t}\subset \Omega \) as \((\mathrm{spt}\mu )_\mathrm{t}:=\{\mathrm{x}\in \Omega \,:\, (\mathrm{x},\mathrm{t})\in \mathrm{spt}\mu \}\).
We have the following inclusion.
Lemma 5.1
For all \(t>0\),
Proof
Suppose \(x\in \mathrm{spt}\, \mu _{t_0}\) and assume for a contradiction that \((x,t_0)\notin \mathrm{spt}\, \mu \). Then there exists \(r>0\) such that \(\mu (B_r(x)\times (t_0-r^2,t_0+r^2))=0\). Take \(\phi \in C^2_c(B_r(x);{\mathbb R}^+)\) with \(\phi =1\) on \(B_{r/2}(x)\). Since \(x\in \mathrm{spt}\, \mu _{t_0}\), we have \(\mu _{t_0}(\phi )>0\). By Proposition 5.1 and ,  is monotone decreasing. Thus one sees that for all sufficiently small \(h>0\), we have \(\mu _{t_0-h}(\phi )\ge \mu _{t_0}(\phi )-o(1)\ge \mu _{t_0}(\phi )/2\) where \(o(1)\rightarrow 0\) as \(h\rightarrow 0\). Since \(d\mu =d\mu _t dt\), this contradicts \((x,t_0)\notin \mathrm{spt}\, \mu \). \(\square \)
is monotone decreasing. Thus one sees that for all sufficiently small \(h>0\), we have \(\mu _{t_0-h}(\phi )\ge \mu _{t_0}(\phi )-o(1)\ge \mu _{t_0}(\phi )/2\) where \(o(1)\rightarrow 0\) as \(h\rightarrow 0\). Since \(d\mu =d\mu _t dt\), this contradicts \((x,t_0)\notin \mathrm{spt}\, \mu \). \(\square \)
6 Rectifiability of limit measures
Throughout this section, let \(\varphi _{\varepsilon _i}\), \(\mu _t^{\varepsilon _i}\), \(u_{\varepsilon _i}\), \(\mu _t\) and \(\mu \) be as in Sect. 5 and let \({\tilde{\rho }}_{(y,s)}\), \(e_{\varepsilon _i}\) and \(\xi _{\varepsilon _i}\) be as in (4.15) and (4.16). We fix arbitrary \(T>0\) and let  be as in (4.11) with this T. Note that all the estimates in the previous two sections hold in [0, T] for all sufficiently large i (such that \(T_i>T\)). For simplicity we often drop i from these quantities. In this section we prove that for a.e. \(t\ge 0\), there exists a countably \((n-1)\)-rectifiable set \(M_t\) such that \(\mu _t=\theta (x,t) {\mathcal H}^{n-1}\lfloor _{M_t}\), where \(\theta \) is a non-negative \({\mathcal H}^{n-1}\) measurable function. The important ingredient for the proof is the vanishing of the discrepancy measure defined below. As stated in the introduction, the content of this section is based on [28] with some modifications coming from the transport term. First we note
be as in (4.11) with this T. Note that all the estimates in the previous two sections hold in [0, T] for all sufficiently large i (such that \(T_i>T\)). For simplicity we often drop i from these quantities. In this section we prove that for a.e. \(t\ge 0\), there exists a countably \((n-1)\)-rectifiable set \(M_t\) such that \(\mu _t=\theta (x,t) {\mathcal H}^{n-1}\lfloor _{M_t}\), where \(\theta \) is a non-negative \({\mathcal H}^{n-1}\) measurable function. The important ingredient for the proof is the vanishing of the discrepancy measure defined below. As stated in the introduction, the content of this section is based on [28] with some modifications coming from the transport term. First we note
Lemma 6.1
Let \(\varphi _{\varepsilon _i}\) and \(\mu _t^{\varepsilon _i}\) be the sequences constructed in Sect. 5. Then there exist a subsequence (denoted by the same index) and a Radom measure \(|\xi |\) such that
for all \(0\le t_0<t_1<\infty \) and \(\phi \in C_c(\Omega \times [0,\infty ))\).
Due to the uniform estimate \(\sup _{i\in {\mathbb N}}\sup _{t\in [0,T]} \mu _t^{\varepsilon _i}(\Omega )\) for any fixed T, the existence of such subsequence follows from the weak compactness of measures. Since \(|\xi |\) measures the difference between the two terms in \(\mu _t^{\varepsilon _i}\) in the limit, we may call \(|\xi |\) as a discrepancy measure. Unlike \(\mu _t^{\varepsilon _i}\), which converges to \(\mu _t\) for all \(t\ge 0\), note that we do not claim any convergence of \(|\xi _{\varepsilon _i}(\cdot , t)|\, dx\) in general. Instead, we will prove
Theorem 6.1
\(|\xi |=0\) on \(\Omega \times [0,\infty )\).
6.1 Forward density lower bound
Lemma 6.2
There exist \(1>\gamma _1,\,\eta _1>0\) depending only on n,  ,
,  , p, q, T, W, \(D_0\) and \(1>\eta _2>0\) depending only on n,
, p, q, T, W, \(D_0\) and \(1>\eta _2>0\) depending only on n,  , W with the following property. Given \(0\le t<s<T/2\) with \(s-t\le \eta _1\), set \(r:=\sqrt{2(s-t)}\) and \(t^{\prime }:=s+r^2/2\). If \(x\in \Omega \) satisfies
, W with the following property. Given \(0\le t<s<T/2\) with \(s-t\le \eta _1\), set \(r:=\sqrt{2(s-t)}\) and \(t^{\prime }:=s+r^2/2\). If \(x\in \Omega \) satisfies
then \((B_{\gamma _1 r}(x)\times \{t^{\prime }\})\cap \mathrm{spt}\mu =\emptyset \).
Remark 6.1
Note that \(t<s<t^{\prime }<T\) with \(s=\frac{t^{\prime }+t}{2}\). The Lemma says that, unless there is at least a certain amount of measure, there would be no measure later in the neighborhood. The monotonicity formula (4.90) plays a crucial role for such conclusion.
Proof
Assume for a contradiction that \((x^{\prime },t^{\prime })\in \mathrm{spt}\mu \) for some \(x^{\prime }\in B_{\gamma _1 r}(x)\) under the assumption of (6.2), where \(\gamma _1\) will be chosen later. Then there is a sequence \(\{(x_j,t_j)\}_{j=1}^{\infty }\) and \(\{\varepsilon _{i(j)}\}_{j=1}^{\infty }\) such that \(\lim _{j\rightarrow \infty }(x_j,t_j)=(x^{\prime },t^{\prime })\) and \(|\varphi _{\varepsilon _{i(j)}}(x_j,t_j)|< \alpha \) for all j. We relegate its proof to Lemma 6.3. We re-index i(j) as j. Then just as in the proof of (4.45), there exists  such that
such that
We use Theorem 4.2. By restricting \(t^{\prime }-s\le \eta _1\) small so that

in (4.90) for all sufficiently large j, we obtain

Letting \(j\rightarrow \infty \), we obtain by (6.3) and (6.4)
We next want to change the center of the kernel from \(x^{\prime }\) to x. Fix \(0<\delta <1/2\) so that \(2\delta D_1<\eta _2\). Corresponding to \(\delta \), a direct computation shows that we may choose \(\gamma _1>0\) so that
if \(|x-x^{\prime }|\le \gamma _1 r\). By the choice of \(\delta \), (6.5) and (6.6) show
Finally, since \(t^{\prime }-s=s-t\), we have \(\tilde{\rho }_{(x,t^{\prime })}(y,s)=\tilde{\rho }_{(y,s)}(x,t)\). This is a contradiction to (6.2). Thus we proved \((x^{\prime },t^{\prime })\notin \mathrm{spt}\mu \). \(\square \)
Lemma 6.3
Assume \((x^{\prime },t^{\prime })\in \mathrm{spt}\mu \). Then there are sequences \(\{(x_j,t_j)\}_{j=1}^{\infty }\) and \(\{\varepsilon _{i(j)}\}_{j=1}^{\infty }\) such that \(\lim _{j\rightarrow \infty }(x_j,t_j)=(x^{\prime },t^{\prime })\) and \(|\varphi _{\varepsilon _{i(j)}}(x_j,t_j)|< \alpha \) for all j.
Proof
If the claim were not true, there would be \(0<r_0<1/2\) such that
for all sufficiently large i. Let \(\phi \in C^{2}_c(B_{r_0}(x^{\prime }))\) be a function such that \(|\nabla \phi |\le 2/r_0\), \(0\le \phi \le 1\) on \(B_{r_0}(x^{\prime })\) and \(\phi =1\) on \(B_{r_0/3}(x^{\prime })\). Then the same computations following (4.60) using (6.8) show
for \(t\in [t^{\prime }-r_0^2, t^{\prime }+r_0^2]\). Writing \(M_i:=\sup _{\lambda \in [t^{\prime }-r_0^2,t^{\prime }+r_0^2]}\int _{\mathrm{spt}\phi } \frac{1}{2} |\nabla \varphi _{\varepsilon _i}(x,\lambda )|^2\, dx\), and proceeding similarly as in (4.65), we obtain
for \(\lambda \in [t^{\prime }-r_0^2,t^{\prime }+r_0^2]\). Since \(\varepsilon _i M_i\) is uniformly bounded, we see from (6.9) that
Next, due to (6.8) and the continuity of \(\varphi _{\varepsilon _i}\), we may assume \(1\ge \varphi _{\varepsilon _i}\ge \alpha \) on \(B_{r_0}(x^{\prime })\times [t^{\prime }-r_0^2,t^{\prime }+r_0^2]\) without loss of generality. Otherwise, we have \(-1\le \varphi _{\varepsilon _i}\le -\alpha \) and we may argue similarly. In the following, we use
for some \(c(W)>0\) if \(s\in [\alpha ,1]\). Multiply the equation (4.2) by \((\varphi _{\varepsilon _i} -1)\phi ^2\) and integrate over \(Q:=\Omega \times [t^{\prime }-r_0^2,t^{\prime }+r_0^2]\). By integration by parts, the Cauchy-Schwarz inequality, \(|\varphi _{\varepsilon _i}-1|\le 1\) and (6.11), one obtains
Since the right-hand side of (6.12) is uniformly bounded, we obtain
The estimates (6.10) and (6.13) show that
By Fatou’s lemma, Proposition and (6.14), we have
This proves that \((x^{\prime },t^{\prime })\notin \mathrm{spt}\mu \). \(\square \)
Corollary 6.1
Let \(U \subset \Omega \) be open. For \(0< t\le T\), there exists  depending only on
depending only on  with the property that
with the property that

and

Proof
We only need to prove the result for every compact set \(K\subset U\). Set \(X_t = (\mathrm{spt}\mu )_\mathrm{t}\cap \mathrm{K}\). For any \((x,t)\in X_t\), by the same argument leading to (6.5), we have
for sufficiently small \(r>0\). For \(0<L<1/(2r)\), using the upper density ratio bound, we have
Thus by choosing sufficiently large L depending only on \(n, D_1\) and \(\eta _2\), (6.18) and (6.19) show
Since \(\tilde{\rho }_{(x,t)}(\cdot ,t-r^2)\le (4\pi )^{-(n-1)/2}r^{-(n-1)}\), from (6.20) we obtain
Let \(\mathcal {B} =\{ \bar{B}_{rL} (x)\subset U \, | \, x\in X_t\}\) which is the covering of \(X_t \) by closed balls centered at \(x\in X_t\). By the Besicovitch covering theorem, there exist a finite sub-collection \(\mathcal {B}_1,\ldots , \mathcal {B}_{B(n)}\) such that each \(\mathcal {B}_i\) is a pairwise disjoint family of closed balls and
Let \({\mathcal H}^{n-1}_{\delta }\) be defined as in [41], so that \({\mathcal H}^{n-1}=\lim _{\delta \downarrow 0}{\mathcal H}^{n-1}_{\delta }\). By the definition, (6.21) and (6.22) we obtain
By setting  to be the constant above and letting \(r\downarrow 0\), we obtain (6.16). The second inequality (6.17) follows immediately from (6.16) and Lemma 5.1. \(\square \)
to be the constant above and letting \(r\downarrow 0\), we obtain (6.16). The second inequality (6.17) follows immediately from (6.16) and Lemma 5.1. \(\square \)
Lemma 6.4
For \(1\le T<\infty \), let \(\eta _2\) be as in Lemma 6.2 corresponding to T. Define
Then we have \(\mu (Z_T)=0\).
Proof
For \(0<\tau \le \eta _1\), where \(\eta _1\) is as in Lemma 6.2, define
Note that \(Z_T \subset \cup _{m=1}^{\infty }Z^{\tau _m}\) for some \(\{\tau _m\}_{m=1}^{\infty }\) with \(\lim _{m\rightarrow \infty } \tau _m=0\). Hence we only need to prove \(\mu (Z^{\tau })=0\). In the following we fix \(0<\tau \le \eta _1\). For \(0\le t\le T/2\) and \(x\in \Omega \), set
where \(\gamma _1\) is as in Lemma 6.2. For \((x,t)\in Z^{\tau }\), we use Lemma 6.2 to prove
Suppose for a contradiction that \((x^{\prime },t^{\prime })\in P_{\tau }(x,t)\cap Z^{\tau }\). Suppose first that \(t^{\prime }>t\). Set \(r:=\sqrt{t^{\prime }-t}\) and \(s:=(t^{\prime }+t)/2\) so that \(t^{\prime }=s+r^2/2\). Note that we have \(|x-x^{\prime }|<\gamma _1 r\) by \((x^{\prime },t^{\prime })\in P_{\tau }(x,t)\). Since \(s-t<\tau \le \eta _1\), we may apply Lemma 6.2 to conclude that \((x,t)\in Z^{\tau }\) implies \((x^{\prime },t^{\prime })\notin \mathrm{spt}\mu \), and in particular, \((x^{\prime },t^{\prime })\notin Z^{\tau }\), which is a contradiction. Next suppose that \(t^{\prime }<t\). We change the role of (x, t) and \((x^{\prime },t^{\prime })\) in the previous case, and conclude that \((x^{\prime },t^{\prime })\in Z^{\tau }\) implies \((x,t)\notin Z^{\tau }\), which is again a contradiction. This proves (6.24). Next, for \((x_0,t_0)\in \Omega \times [\tau /2,T/2]\), define
Then \(Z^{\tau }\) can be covered by an at most countable union of \(Z^{\tau ,x_j,t_j}\) with a suitable choice of \(\{(x_j,t_j)\}\). Thus we only need to prove \(\mu (Z^{\tau ,x_0,t_0})=0\). With arbitrary \(0<r\le \gamma _1\sqrt{\tau }\), consider a family of closed balls \(\{\bar{B}_r(x)\}_{(x,t)\in Z^{\tau ,x_0,t_0}}\) and apply the Besicovitch covering theorem. Then we have a finite subfamily \(\bar{B}_r(x_1),\,\ldots ,\bar{B}_r(x_N)\) with \((x_j,t_j)\in Z^{\tau ,x_0,t_0}\) (\(j=1,\ldots ,N\)) and
Note that for each \(j=1,\ldots , N\), by (6.24) and (6.25), we have
The inclusions (6.26) and (6.27) show
Since \(\bar{B}_r(x_j)\times (t_0-\tau /2,t_0+\tau /2){\setminus } P_{\tau }(x_j,t_j)\subset \bar{B}_r(x_j)\times [t_j-\gamma _1^{-2}r^2,t_j+\gamma _1^{-2}r^2]\), from (6.28) we obtain
Since \(d\mu =d\mu _t dt\), (6.29), (4.13) and (6.26) show
Since \(0<r\le \gamma _1\sqrt{\tau }\) is arbitrary, (6.30) shows \(\mu (Z^{\tau ,x_0,t_0})=0\). This concludes the proof. \(\square \)
6.2 Vanishing of \(\xi \)
First we remark the following
Lemma 6.5
For \(1\le T<\infty \) there exists  depending only on n,
depending only on n,  ,
,  , p, q, T, W, \(D_0\) with the following property. For any \((y,s)\in \Omega \times (0,T)\), we have
, p, q, T, W, \(D_0\) with the following property. For any \((y,s)\in \Omega \times (0,T)\), we have

Proof
In (4.90), set \(t_0=0\) and \(t_1=s-\epsilon \) for \(0<\epsilon <s\). We simply let \(\varepsilon _i\rightarrow 0\) and we set the supremum of the right-hand side of (4.90) (with no \(\varepsilon \) term) plus \(D_0\) (coming from the left-hand side) to be  . Then letting \(\epsilon \rightarrow 0\), we obtain (6.31). \(\square \)
. Then letting \(\epsilon \rightarrow 0\), we obtain (6.31). \(\square \)
We are ready to prove Theorem 6.1.
Proof
We integrate (6.31) with respect to \(d\mu _s ds\) over \(\Omega \times (0,T)\) and use Fubini’s theorem to obtain

The finiteness of (6.32) shows
for \(|\xi |\) a.e. \((x,t)\in \Omega \times (0,T)\). Next, we claim that, whenever (6.33) holds at (x, t), we have
We use the monotonicity formula (4.90) for the proof. Set \(\lambda := \log (s-t)\) and
After the change of variable, (6.33) is equivalent to
We fix \(\theta \in (0,1]\) in the following. Corresponding to this \(\theta \), by (6.35), there exists a decreasing sequence \(\{ \lambda _i \}_{i=1}^\infty \) such that
For arbitrary \(\lambda \in (-\infty , \lambda _1 )\), choose i such that \(\lambda \in [\lambda _i , \lambda _{i-1} )\). Then by (4.90) (with \(\varepsilon \rightarrow 0\)) applied with \(t_0=t+e^{\lambda _i} < t_1=t+e^{\lambda }\), we have
where \(\lim _{\theta \rightarrow 0}o(1)=0\). On the other hand, by (6.36) we have
By direct calculation,
where \(\lim _{M\rightarrow \infty }o(1)=0\) and the convergence does not depend on \(\theta \). For any fixed M, we have
where \(\lim _{\theta \rightarrow 0}o(1)=0\). The inequalities (6.37)–(6.40) show that \(h(t+e^{\lambda })\) is made arbitrarily small for all \(\lambda <\lambda _1\) and prove (6.34). Finally define \(a(x,t):=\limsup _{s\downarrow t}\int _{\Omega }\tilde{\rho }_{(y,s)}(x,t)\, d\mu _s (y)\) and note that \(\Omega \times (0,T)\) may be split into two disjoint sets
The claim (6.34) proved \(|\xi |(B)=0\). On the other hand, by Lemma 6.4 we have \(\mu (A)=0\). Since \(|\xi |\le \mu \) by definition, this proves \(|\xi |(\Omega \times (0,T))=0\). Since \(T>0\) is arbitrary, we have \(|\xi |(\Omega \times (0,\infty ))=0\). \(\square \)
6.3 Associated varifolds and rectifiability theorem
We have so far obtained \(\mu _t\) as a limit of Radon measures \(\{\mu _{t}^{\varepsilon _i}\}_{i=1}^{\infty }\). To prove the rectifiability of \(\mu _t\) for a.e. \(t\ge 0\), we now consider a sequence of varifolds which are naturally associated with \(\{\mu _t^{\varepsilon _i}\}_{i=1}^{\infty }\).
Definition 6.1
For \(\varphi _{\varepsilon _i}(\cdot ,t)\), we define \(V_t^{\varepsilon _i}\in \mathbf{V}_{n-1}(\Omega )\) as follows. For \(\phi \in C_c(G_{n-1}(\Omega ))\),
Lemma 6.6
For \(g=(g_1,\ldots ,g_n)\in C_c^1(\Omega ;{\mathbb R}^n)\), we have
Proof
We omit i in the following. The first variation of \(V_t^{\varepsilon }\) with respect to g is
By repeated integration by parts, we have
Also by integration by parts,
Now substituting (6.44) and (6.45) into (6.43), we obtain (6.42). \(\square \)
Proposition 6.1
For a.e. \(t\ge 0\), \(\mu _t\) is rectifiable, and any convergent subsequence \(\{V_t^{\varepsilon _{i_j}}\}_{j=1}^{\infty }\) with
converges to the unique varifold associated with \(\mu _t\).
Proof
By Theorem 6.1 and by the dominated convergence theorem, we have
for full sequence for a.e. \(t\ge 0\). By Lemma 4.4, we see that
Thus, by Fatou’s lemma, we have
for a.e. \(t\ge 0\). Suppose \(t\ge 0\) satisfies both (6.47) and (6.48). Since \(\Vert V_t^{\varepsilon _i}\Vert (\Omega ) \le \mu _t^{\varepsilon _i}(\Omega )\) is uniformly bounded in i, by the weak compactness theorem for measures, there exists a convergent subsequence \(\{V_t^{\varepsilon _{i_j}}\}_{j=1}^{\infty }\) which satisfies (6.46) and which converges to a varifold \(V_t\). Due to Proposition and (6.47), we have
Next, a standard measure theoretic argument (see for example [41, 3.2(2)]) shows
for any \(s> 0\). By (6.17), \({\mathcal H}^{n-1}(\mathrm{spt}\, \mu _t)<\infty \), thus (6.50) shows
The two equalities (6.49) and (6.51) show that
Next we use (6.42). For any fixed \(g\in C^1_c(\Omega ;{\mathbb R}^n)\), (6.47) shows that the limits of the last two terms of (6.42) are both 0. Thus we have
for g with \(\sup \, |g|\le 1\). Since the right-hand side of (6.53) does not depend on g and since \(\delta V_t^{\varepsilon _{i_j}}(g)\rightarrow \delta V_t(g)\), we have
which shows that the total variation \(\Vert \delta V_t\Vert \) is a Radon measure. Allard’s rectifiability theorem [1] shows that the right-hand side of (6.52) is rectifiable, and hence so is \(V_t\). Once we know that \(V_t\) is rectifiable, \(V_t\) is determined uniquely by \(\Vert V_t\Vert =\mu _t\). In particular, this shows that \(\mu _t\) is rectifiable. The argument up to this point is valid for any convergent subsequence with (6.46) and (6.47). On the other hand, note that \(\mu _t\) does not depend on the choice of subsequence \(\{V_t^{\varepsilon _{i_j}}\}_{j=1}^{\infty }\). Since \(\mu _t\) determines \(V_t\) uniquely, any converging subsequence of \(\{V_t^{\varepsilon _i}\}_{i=1}^{\infty }\) with (6.46) and (6.47) has the same limit \(V_t\). This completes the proof. \(\square \)
7 Integrality of limit measures
In this section we prove that the density function of \(\mu _t\) is integer-valued \(\mu _t\) a.e. modulo division by \(\sigma \).
7.1 Separating sheets
We prove in this subsection that, if a set of appropriate quantities are controlled, then we have a lower bound on a measure in terms of a sum of densities of vertically aligned points. As the name of the present subsection indicates, what one carries out in essence is to decompose the domain horizontally so that each separated domain contains approximately one sheet of diffused interface. The original idea comes from [1] and it has been first used in the context of the diffused interface problem in [27].
Lemma 7.1
Suppose
-
(1)
\(N\in {\mathbb N}\), Y is a finite subset of \(\mathbb {R}^n , 0<R<\infty , 1<M<\infty , 0<a<\infty , 0<\varepsilon <1, 0<\varrho <\infty ,0<E_0 <\infty \) and \(-\infty \le l_1 <l_2 \le \infty \).
-
(2)
Y has no more than \(N+1\) elements, and \(Y\subset \{(0,\ldots ,0,x_n)\,:\, l_1+a<x_n<l_2-a\}\). Moreover \(|x-z|>3a\) for \(x,z \in Y \) with \( x\not = z\).
-
(3)
\((M+1)\mathrm{diam}\mathrm{Y}<\mathrm{R}\), and put \(\tilde{R} := M \mathrm{diam}\mathrm{Y}\).
-
(4)
We have \(\varphi \in C^2(\{ y\in \mathbb {R}^n \, : \, \mathrm{dist}(\mathrm{y},\mathrm{Y})<\mathrm{R} \})\).
-
(5)
For all \(x=(0,\ldots ,0,x_n)\in Y\),
$$\begin{aligned} \int _a ^R \frac{d\tau }{\tau ^n}\int _{B_\tau (x) \cap \{ y_n =l_j \}} |e_\varepsilon (y_n -x_n)-\varepsilon \varphi _{x_n} (y-x) \cdot \nabla \varphi | \, d\mathcal {H} ^{n-1} (y) \le \varrho \nonumber \\ \end{aligned}$$(7.1)for \(j=1,2\), where \(e_{\varepsilon }\) is defined as in (4.16).
-
(6)
For all \(x\in Y\) and \(a\le r \le R\),
$$\begin{aligned} \int _{B_r (x)} |\xi _\varepsilon | +(1-(\nu _n)^2) \varepsilon |\nabla \varphi |^2 +\varepsilon |\nabla \varphi |\left| \Delta \varphi -\frac{W^{\prime }(\varphi )}{\varepsilon ^2} \right| \, dy \le \varrho r^{n-1},\nonumber \\ \end{aligned}$$(7.2)where \(\xi _{\varepsilon }\) is defined as in (4.16) and \(\nu =(\nu _1,\ldots ,\nu _n)=\frac{\nabla \varphi }{|\nabla \varphi |}\).
-
(7)
For all \(x\in Y\),
$$\begin{aligned} \int _a^R \frac{d\tau }{\tau ^n}\int _{B_{\tau }(x)}(\xi _{\varepsilon })_+\, dy\le \varrho . \end{aligned}$$(7.3) -
(8)
For all \(x\in Y\) and \(a\le r\le R\),
$$\begin{aligned} \int _{B_r (x)} \varepsilon |\nabla \varphi |^2 \, dy\le E_0 r^{n-1}. \end{aligned}$$(7.4)
Then we have the following:
-
(A)
With \(S:=\{x\,:\, l_1<x_n<l_2\}\) and for all \(x\in Y\) and \(a\le r<R\),
$$\begin{aligned} \frac{1}{r^{n-1}}\int _{B_r(x)\cap S} e_{\varepsilon }\le \frac{1}{R^{n-1}}\int _{B_R(x)\cap S} e_{\varepsilon }+\varrho (3+R). \end{aligned}$$(7.5) -
(B)
There exists \(l_3 \in (l_1,l_2)\) such that \(|x_n -l_3|\ge a\) and
$$\begin{aligned}&\int _a ^{\tilde{R}} \frac{d\tau }{\tau ^n} \int _{B_\tau (x)\cap \{ y_n =l_3 \} } | e_\varepsilon (y_n -x_n )-\varepsilon \varphi _{x_n} (y-x) \cdot \nabla \varphi | \, d\mathcal {H}^{n-1} (y) \nonumber \\&\quad \le 3(N+1)NM \left( \varrho + E_0 ^{\frac{1}{2}} \varrho ^{\frac{1}{2}}\right) \end{aligned}$$(7.6)for any \(x=(0,\cdot ,0,x_n)\in Y\).
-
(C)
Put
$$\begin{aligned}&\displaystyle Y_1 :=Y \cap \{ x \, : \, l_1 < x_n < l_3 \}, \quad Y_2 :=Y \cap \{ x \, : \, l_3 < x_n < l_2 \},\\&\displaystyle S_0 :=\{ x \, : \, l_1 < x_n < l_2 \ \text {and} \ {\mathrm{dist}} (Y,x) <R \}, \\&\displaystyle S_1 :=\{ x \, : \, l_1 < x_n < l_3 \ \text {and} \ {\mathrm{dist}} (Y_1,x) <{\tilde{R}} \},\\&\displaystyle S_2 :=\{ x \, : \, l_3 < x_n < l_2 \ \text {and} \ {\mathrm{dist}}(Y_2,x) < \tilde{R} \}. \end{aligned}$$Then \(Y_1\) and \(Y_2\) are non-empty,
$$\begin{aligned} \mathrm{diam} Y_j\le \frac{N-1}{N}\mathrm{diam} Y\quad \text{ for } j=1,2 \end{aligned}$$(7.7)and
$$\begin{aligned} \frac{1}{\tilde{R} ^{n-1}} \left( \int _{S_1}e_\varepsilon + \int _{S_2}e_\varepsilon \right) \le \left( 1+\frac{1}{M} \right) ^{n-1} \left\{ \frac{1}{R^{n-1}} \int _{S_0} e_\varepsilon +\varrho (3+R) \right\} .\nonumber \\ \end{aligned}$$(7.8)
Proof
For any \(x\in Y\), after a parallel translation, assume without loss of generality that \(x=0\) for the proof of \(\text {(A)}\). Let \(\zeta _1 (y)\) be a smooth approximation of the characteristic function \(\chi _{B_r (0)} \), where \(a\le r<R\). Let \(\zeta _2 (y)\) be a smooth approximation to the characteristic function of S which depends only on \(y_n\). Let us denote
Multiply (7.9) by \((y\cdot \nabla \varphi ) \zeta _1 \zeta _2\). After integration by parts twice (as in the computation for (6.42)) and letting \(\zeta _1 \rightarrow \chi _{B_r (0)}\), we obtain
We estimate the integral over [r, R] (\(r\ge a\)) of the second term in (7.10) first. We let \(\zeta _2\rightarrow \chi _{S}\) and compute
where (7.2) and (7.3) are used. From (7.10), (7.11) and (7.1), we obtain (7.5), proving \(\text {(A)}\). Next, choose \(\tilde{y},\tilde{z} \in Y\) such that \(\tilde{z}_n -\tilde{y}_n \ge \frac{{\mathrm{diam}\mathrm{Y}}}{N} \) and \(Y\cap \{ x \, : \, \tilde{y}_n < x_n < \tilde{z}_n \}=\emptyset \). Let \(\tilde{l}_1 = \tilde{y}_n +\frac{\tilde{z}_n -\tilde{y}_n}{3}\) and \(\tilde{l}_2 = \tilde{z}_n -\frac{\tilde{z}_n -\tilde{y}_n}{3}\). To choose an appropriate \(l_3\in (\tilde{l}_1, \tilde{l}_2)\) which satisfies (7.6), we first observe, for \(x\in Y\) and \(y\in B_r (x)\),
Thus by Fubini’s theorem (7.12), (7.2) and (7.4) we obtain
The inequality (7.13) is satisfied for each \(x\in Y\), hence we guarantee that there exists \(l_3 \in (\tilde{l}_1 , \tilde{l}_2)\) such that
for each \(x\in Y\). Since \(\tilde{l}_2 - \tilde{l} _1 \ge \frac{{\mathrm{diam}\mathrm{Y}}}{3N}\), we have \(\frac{\tilde{R}}{\tilde{l}_2 - \tilde{l}_1} \le 3MN\), and we obtain \(\text {(B)}\). We have \(S_1 \cup S_2\subset B_{(\tilde{R} +\mathrm{diam}\mathrm{Y})} (x) \cap S\) for \(x\in Y\) and \(S_1\cap S_2=\emptyset \). Thus, using also (3) and (7.5) with \(r=\tilde{R}+\mathrm{diam}\mathrm{Y}<\mathrm{R}\), we have
Since \(B_R (x) \cap S \subset S_0\), we obtain (7.8). One can check that \(\tilde{z}_n-\tilde{y}_n\ge \frac{{\mathrm{diam}\mathrm{Y}}}{N}\) implies (7.7). This proves \(\text {(C)}\). \(\square \)
Proposition 7.1
Corresponding to \(0<R<\infty , \ 0<E_0<\infty , \ 0<s<1\) and \(N\in {\mathbb N}\), there exists \(0<\varrho <1\) with the following property: Assume \(Y\subset \mathbb {R}^n\) has no more than \(N+1\) elements and \(Y\subset \{(0,\ldots ,0,x_n)\,:\, x_n\in {\mathbb R}\}\). For some \(0<a<R\) and for all \(y,\, z\in Y\) with \(y\ne z\), we have \(|y-z|>3a\) and \(\mathrm{diam}\mathrm{Y} \le \varrho \mathrm{R}\). In addition we assume (4), (6), (7), (8) of Lemma 7.1. Then we have
Proof
Denote the number of elements in Y by \(\# Y\). If \(\# Y=1\), the proof leading to the conclusion \(\text {(A)}\) of Lemma 7.1 (with \(l_1=-\infty \) and \(l_2=+\infty \)) gives (7.15) if \(\varrho (1+R)<s\). Note that M is irrelevant in this case since \(\mathrm{diam}\mathrm{Y}=0\). If \(1<\# Y\le N+1\), we use Lemma 7.1 inductively. First, we choose \(M>1\) depending only on \(s,\, n,\,N\) so that
Suppose \((M+1)\mathrm{diam}\mathrm{Y}<\mathrm{R}\). Then all the assumptions of Lemma 7.1 are satisfied, and we obtain \(Y_1\) and \(Y_2\) with the estimates. We apply Lemma 7.1 again to both \(Y_1\) and \(Y_2\) with R there replaced by \({\tilde{R}}=M\mathrm{diam}\mathrm{Y}\). Due to (7.7) and (7.16), we have the assumption (3) satisfied:
for \(j=1,2\). We have (7.1) with the right-hand side given by the right-hand side of (7.6). For each \(j=1,2\), if \(\# Y_j=1\), then we obtain (7.5) with \(r=a\). Otherwise, we separate \(Y_j\) into two non-empty sets. Each time, all the assumptions of Lemma 7.1 are satisfied. Thus, after \((\# Y -1)\)-times, we separate \({\mathbb R}^n\) into \(\# Y\) disjoint horizontal stacks, each having one element of Y. With (7.16), (7.8) and (7.5), we may choose a sufficiently small \(\varrho \) depending only on \(s,\, n,\, N, \, R,\, E_0\) so that (7.15) holds. \(\square \)
7.2 The \(\varepsilon \)-scale estimate
Next proposition is almost identical to [27] and [45]. It shows that the energy behaves more or less like a 1-D simple ODE solution if certain quantities are controlled.
Proposition 7.2
Given \(0<s, \, b,\, \beta <1\), and \(1<c<\infty \), there exist  and \(1<L<\infty \) (which also depend on n and W) with the following property:
and \(1<L<\infty \) (which also depend on n and W) with the following property:
Assume  , \(\varphi \in C^2(B_{4\varepsilon L})\) and
, \(\varphi \in C^2(B_{4\varepsilon L})\) and
and
where \(\nu \) and \(\xi _{\varepsilon }\) are as in (7.2) and (4.16). Then for \(J:= B_{3\varepsilon L}\cap \{x=(0,\ldots ,0,x_n)\}\),
We also have
Proof
Rescale the domain by \(x\mapsto \frac{x}{\varepsilon }\). The rescaled function defined on \(B_{4L}\) is denoted by \(\tilde{\varphi }\). Let \(\Psi :\mathbb {R} \rightarrow (-1,1)\) be the unique solution of the ODE
We have
Define \(\hat{\Psi }(x)=\hat{\Psi }(x_1,x_2,\ldots , x_{n}):= \Psi (x_n)\) for \(x\in \mathbb {R}^n\). Using (7.23), it is not difficult to check that \(\lim _{L\rightarrow \infty }\frac{1}{\omega _{n-1}L^{n-1}} \int _{B_L}\left( \frac{|\nabla \hat{\Psi }|^2}{2}+W(\hat{\Psi }) \right) =\sigma \). Thus depending only on n, s, b, W, we may choose a sufficiently large \(L>0\) such that
whenever \(|\hat{\Psi }(0)|=|\tilde{\varphi }(0)|\le 1-b\). After fixing such L, we next observe that, for a constant \(\tilde{c} =\tilde{c}(W)\),
by (7.19). Some simple ODE argument combined with (7.25) shows that there exist \(0<\tilde{b}<b\) and  depending only on \(b, \beta , L, W\) such that, whenever \(|\tilde{\varphi }(0)| \le 1-b\) and
depending only on \(b, \beta , L, W\) such that, whenever \(|\tilde{\varphi }(0)| \le 1-b\) and  , we have \(|\tilde{\varphi }|\le 1-\tilde{b}\) on \(B_{4L}\).
, we have \(|\tilde{\varphi }|\le 1-\tilde{b}\) on \(B_{4L}\).
Next, we define \(z:B_{4L}\rightarrow \mathbb {R}\) by \(z(x) = \Psi ^{-1} (\tilde{\varphi }(x))\), where \(\Psi ^{-1}\) is the inverse function of \(\Psi \). By \(\Psi ^{\prime } >0\) and \(|\tilde{\varphi }|\le 1-\tilde{b}\), \(\Psi ^{-1}\) and z are well-defined and
for \(x\in B_{4L}\). By (7.17), we have \(\Vert \tilde{\varphi }\Vert _{C^{1,\frac{1}{2}}(B_{4L})}\le 2c\). Since \(\Vert \Psi ^{-1}\Vert _{C^2(\{t\,:\, |t|\le 1-\tilde{b}\})}\) is bounded depending only on \(b, \beta , L, W\) due to (7.26), we have
We next note that \(\tilde{\varphi }=\Psi \circ z\) and (7.22) give
After rescaling (7.18) and using (7.26) and (7.28), we obtain
For a non-negative function \(f\in C^{\frac{1}{2}}(B_{4L})\), suppose \(\max _{\bar{B}_{3L}} f=f(\hat{x})>0\) for \(\hat{x}\in \bar{B}_{3L}\). Then it is easy to check that \(f(x)\ge f(\hat{x})/2\) as long as \(|x-\hat{x}|\le (f(\hat{x}))^2/(2\Vert f\Vert _{C^{\frac{1}{2}}(B_{4L})})^2=:r\). Then we have
and thus we obtain
By (7.27), (7.29) and (7.30), we have
Since \(\Psi (0)=\tilde{\varphi }(0)=\Psi (z(0))\), we have \(z(0)=0\). Note that (7.31) for sufficiently small \(\varrho \) shows that \(\nabla z\approx (0,\ldots ,0,\pm 1)\) uniformly on \(B_{3L}\). This shows that \(z\approx x_n\) or \(-x_n\) in \(C^1(B_{3L})\) when \(\varrho \) is small, and in particular, we have (7.20). For the former case, we have \(\tilde{\varphi }(x)=\Psi (z(x))\approx \Psi (x_n) =\hat{\Psi }(x)\), and (7.24) gives (7.21) for sufficiently small \(\varrho \) with the right dependence. In the case of \(-x_n\), we simply note that changing \(\hat{\Psi }\) to \(\Psi (-x_n)\) does not affect the proof. \(\square \)
7.3 Estimate on \(\{ |\varphi _{\varepsilon }| \ge 1-b \}\)
We need to show some uniform smallness of energy on \(\{|\varphi _{\varepsilon }|\ge 1-b\}\) for the final step of this section.
Lemma 7.2
Suppose \(\varphi _{\varepsilon }\) and \(u_{\varepsilon }\) are the solutions for (4.2) constructed in Sect. 5. Given \(0<\delta <T\), there exist  and
and  depending only on
depending only on  with the following property. Suppose for \((x_0,t_0)\in \Omega \times (\delta ,T)\) and \(0<\lambda \le 2/3\),
with the following property. Suppose for \((x_0,t_0)\in \Omega \times (\delta ,T)\) and \(0<\lambda \le 2/3\),
where \(\lambda \) additionally satisfies

Then
if  .
.
Proof
First note that \(B_{\varepsilon \tilde{r}}(x_0)\times (t_0-\varepsilon ^2 {\tilde{r}}^2,t_0) \subset \Omega \times (0,T)\) due to (7.33). Rescale the domain by \(x \mapsto \frac{x-x_0}{\varepsilon }\) and \(t\mapsto \frac{t-t_0}{\varepsilon ^2}\), so that we are concerned with the domain \(B_{\tilde{r}}\times (-{\tilde{r}}^2,0)\). Let \(\tilde{\varphi }_{\varepsilon } (x,t):=\varphi _{\varepsilon } (\varepsilon x+x_0,\varepsilon ^2 t+t_0)\) and \(\tilde{u}_{\varepsilon } (x,t):=u_{\varepsilon } (\varepsilon x+x_0,\varepsilon ^2 t+t_0)\). As a comparison function, we need a function \(\psi \) with the following property

for some  . To find such a function, solve \(\Delta \tilde{\psi }=\kappa \tilde{\psi }/ 4\) with \(\tilde{\psi }(0)=1\) on \({\mathbb R}^n\) among radially symmetric functions. One can show that \(\tilde{\psi }\) grows exponentially as \(|x|\rightarrow \infty \) and \(\tilde{\psi }\) achieves its minimum at the origin, thus \(\tilde{\psi }\ge 1\) on \({\mathbb R}^n\) in particular. Then set \(\psi (x,t):= e^{-\kappa t/4} \tilde{\psi }(x)\). With a suitably large
. To find such a function, solve \(\Delta \tilde{\psi }=\kappa \tilde{\psi }/ 4\) with \(\tilde{\psi }(0)=1\) on \({\mathbb R}^n\) among radially symmetric functions. One can show that \(\tilde{\psi }\) grows exponentially as \(|x|\rightarrow \infty \) and \(\tilde{\psi }\) achieves its minimum at the origin, thus \(\tilde{\psi }\ge 1\) on \({\mathbb R}^n\) in particular. Then set \(\psi (x,t):= e^{-\kappa t/4} \tilde{\psi }(x)\). With a suitably large  depending only on n and \(\kappa \), this \(\psi \) satisfies (7.34). Next set
depending only on n and \(\kappa \), this \(\psi \) satisfies (7.34). Next set  . We choose such \(\tilde{r}\) so that
. We choose such \(\tilde{r}\) so that

Under the assumption of (7.32) which is equivalent to
for a contradiction, assume
Define \(\phi _{\varepsilon } :=1-\varepsilon ^\lambda \psi \). By (7.34) we have \(\partial _t \phi _{\varepsilon } = \Delta \phi _{\varepsilon } +\frac{\kappa }{2}(1-\phi _{\varepsilon }) \) on \(\mathbb {R}^n \times (-\infty ,0)\). Furthermore, on the parabolic boundary of \(B_{\tilde{r}}\times (-{\tilde{r}}^2,0)\),  by \(\tilde{r}\ge 1\) and (7.34), hence
by \(\tilde{r}\ge 1\) and (7.34), hence

where (7.35) and (7.37) are used. On the other hand \(\phi _{\varepsilon } (0,0)= 1-\varepsilon ^{\lambda }\psi (0,0)=1-\varepsilon ^\lambda >\tilde{\varphi }_{\varepsilon } (0,0)\) by (7.34) and (7.36). Hence a positive maximum value of \(\phi _{\varepsilon }-{\tilde{\varphi }}_{\varepsilon }\) is achieved at a parabolic interior point \((x^{\prime },t^{\prime }) \in B_{\tilde{r}}\times (-\tilde{r}^2,0]\). We have \(\partial _t (\phi _{\varepsilon }-{\tilde{\varphi }}_{\varepsilon }) -\Delta ( \phi _{\varepsilon }-{\tilde{\varphi }}_{\varepsilon }) \ge 0\) at \((x^{\prime },t^{\prime })\) and \(\phi _{\varepsilon }(x^{\prime },t^{\prime })>{\tilde{\varphi }}_{\varepsilon } (x^{\prime },t^{\prime })\). The latter inequality combined with (7.37) and (3.3) implies \(W^{\prime }({\tilde{\varphi }}_{\varepsilon })<W^{\prime }(\phi _{\varepsilon })\). By substituting the equations satisfied by \(\phi _{\varepsilon }\) and \({\tilde{\varphi }}_{\varepsilon }\) into the former inequality, we obtain
where \(W^{\prime }(\phi _{\varepsilon })\le -\kappa (1-\phi _{\varepsilon })\) follows from (7.37) and (3.3) and \(|{\tilde{u}}_{\varepsilon }|\le \varepsilon ^{-\beta }=\varepsilon ^{-\frac{1}{4}}\) by (5.7) and (5.5). We also used \(\psi \ge {\tilde{\psi }}\ge 1\) in the last inequality. Since \(\Vert \nabla {\tilde{\varphi }}_{\varepsilon }\Vert _{L^{\infty }}\) is bounded uniformly in \(\varepsilon \) (see Lemma 4.1) and \(\lambda \le 2/3<3/4\), for sufficiently small \(\varepsilon \), this is a contradiction. The other case may be proved similarly. \(\square \)
Lemma 7.3
Under the assumptions of Lemma 7.2, there exist  and
and  with the following property. For \(t_0 \in (\delta ,T)\) and \(0<r<1/2\) define
with the following property. For \(t_0 \in (\delta ,T)\) and \(0<r<1/2\) define
If  , then
, then

Proof
For \(x_0\in Z_{r,t_0}\), we claim that there exist positive constants  and
and  such that
such that

Once (7.41) is proved, the Besicovitch covering theorem and (4.40) prove (7.40) with an appropriate choice of  . To prove (7.41), for each \(x_0\in Z_{r,t_0}\) we have \((x^{\prime },t^{\prime })\in B_r(x_0)\times (t_0-r^2,t_0)\) such that \(|\varphi _{\varepsilon }(x^{\prime },t^{\prime })|<\alpha \). Just as in the proof of Lemma 4.5, we have
. To prove (7.41), for each \(x_0\in Z_{r,t_0}\) we have \((x^{\prime },t^{\prime })\in B_r(x_0)\times (t_0-r^2,t_0)\) such that \(|\varphi _{\varepsilon }(x^{\prime },t^{\prime })|<\alpha \). Just as in the proof of Lemma 4.5, we have

By (4.90) with \(t_1\) and \(t_0\) there replaced by \(t^{\prime }\) and \(t_0-2r^2\), and restricting r and \(\varepsilon \) appropriately depending on constants appearing in the right-hand side of (4.90), we obtain

The inequalities (7.42) and (7.43) show that

Using the estimate (4.13), we may choose a large  depending only on \(D_1\) so that
depending only on \(D_1\) so that

By (7.44) and (7.45) we obtain

Since \({\tilde{\rho }}_{(x^{\prime },t^{\prime }+\varepsilon ^2)}(x,t_0-2r^2)\le r^{1-n}\) and  , by setting
, by setting  to be again
to be again  , we obtain (7.41). We restricted r to be small, but when r does not satisfy the restriction, we may choose
, we obtain (7.41). We restricted r to be small, but when r does not satisfy the restriction, we may choose  large so that (7.40) holds trivially. \(\square \)
large so that (7.40) holds trivially. \(\square \)
Proposition 7.3
Suppose \(\varphi _{\varepsilon }\) and \(u_{\varepsilon }\) are the solutions for (4.2) constructed in Sect. 5. Given \(0<\delta <T\) and \(0<s<1\), there exist \(0<b<1\) and  such that
such that
for all \(t\in (\delta ,T)\) if  .
.
Proof
We restrict \(0<b\) to be small in the following independent of \(\varepsilon \). Assume that

Choose \(J=J( \varepsilon ,b) \in \mathbb {N}\) such that
Restrict \(\varepsilon \) so that  and
and  . Note that, with this choice of b and J, we have by (7.49) and (7.48) that
. Note that, with this choice of b and J, we have by (7.49) and (7.48) that

Fix \(t_0 \in (\delta ,T)\) and we define
For any point \(x_0\in A_j\), we apply Lemma 7.2 with \(\lambda =\frac{1}{2^j}\). Note that the condition (7.33) is satisfied due to (7.50). Thus setting  , we obtain
, we obtain
With the notation of (7.39), (7.52) shows

and the application of Lemma 7.3 to (7.53) shows

for all \(j=1,\ldots ,J\). On \(A_j\), by \(|\varphi _\varepsilon |\ge 1-\varepsilon ^{\frac{1}{2^{j+1}}}\), we have
Set \(Y:=\{x\in \Omega \ :\ 1-b \le |\varphi _{\varepsilon }(x,t_0) | \le 1-\sqrt{\varepsilon } \}\). By (7.51) and (7.49), we have
Combining (7.54)–(7.56) and setting  ,
,

where we used the fact that \(2^{-x}\varepsilon ^{2^{-x}}\) is monotone increasing for \(x\in [1,J+1]\) as long as \(\log \sqrt{b} \le -1\), and (7.49). We restrict b so that the right-hand side of (7.57) is less than s / 2. The similar estimate shows

Recalling that \(|\varphi _{\varepsilon }|\le 1\), we have
By (7.57)-(7.59) we restrict \(\varepsilon \) depending on s so that we have (7.47). \(\square \)
7.4 Proof of integrality
Finally we prove the integrality of \(\mu _t\).
Theorem 7.1
For a.e. \(t>0\), \(\mu _t=\theta {\mathcal H}^{n-1}\lfloor _{M_t}\), where \(M_t\) is countably \((n-1)\)-rectifiable and \(\theta (x,t) = N(x,t)\sigma \) for some \({\mathcal H}^{n-1}\) measurable integer-valued function, \(\mu _t\) a.e. \(x\in \Omega \).
Proof
By the argument in the proof of Proposition 6.1, for a.e. \(t\ge 0\), we may choose a subsequence \(\{V_t^{\varepsilon _{i_j}}\}_{j=1}^{\infty }\) such that (6.47) and (with the notation of (7.9))
hold while \(V_t^{\varepsilon _{i_j}}\rightarrow V_t\). Here \(V_t\) is the rectifiable varifold uniquely determined by \(\mu _t\) and recall that \(\mu _t=\Vert V_t\Vert \). In the following we fix any such t and show the claim of the theorem for \(\mu _t\). All functions are evaluated at the same t, and we do not write out the time variable (except for \(\mu _t\) and \(V_t\) with or without \({\varepsilon _i}\)) for simplicity. Moreover, though it is important to note that we are discussing a particular subsequence (or its further subsequence), we denote \(\varepsilon _{i_j}\) by \(\varepsilon _i\) for simplicity.
For any \(m\in {\mathbb N}\), we define
The Besicovitch covering theorem with (7.60) and (7.61) shows that
We then set
and
We claim
Otherwise, we would have a compact set \(K\subset \Omega {\setminus } A\) such that \(\mu _t(K)\ge \frac{1}{2} \mu _t(\Omega {\setminus } A)\). For any \(m\in {\mathbb N}\) we have \(K\subset \Omega {\setminus } A_m\) by (7.64). For each point \(x\in K\), by (7.63), there exists a neighborhood of x which does not intersect with \(A_{i,m}\) for all sufficiently large i. Due to the compactness, thus, there exist \(i_0\) and an open set \(O_m\) such that \(K\subset O_m\) and \(O_m\cap A_{i,m}=\emptyset \) for all \(i\ge i_0\). Let \(\phi _m\in C_c(O_m;{\mathbb R}^+)\) such that \(0\le \phi _m\le 1\) and \(\phi _m=1\) on K. Then
for all \(j\ge i_0\). Since the last quantity of (7.66) is less than \(c(n)c_h(t)/m\) by (7.62), and since m is arbitrary, we obtain \(\mu (K)=0\). This proves the claim (7.65).
Since \(\mu _t\) is rectifiable, \(\mu _t\) a.e. point x has an approximate tangent space. By (7.65), we may also assume that for \(\mu _t\) a.e. x there exists some \(m\in {\mathbb N}\) such that \(x\in A_m\). We fix any such point, and after a parallel translation, we may assume that \(x=0\). Furthermore, after a rotation, we may assume that the approximate tangent space is \(P:=\{x_n=0\}\). Denote \(\theta :=\lim _{r\downarrow 0}\frac{\Vert V_t\Vert (B_r(x))}{\omega _{n-1}r^{n-1}}\). We will be done if we prove that \(\sigma ^{-1}\theta \in {\mathbb N}\).
For any sequence \(r_i\downarrow 0\), we have \(\lim _{i\rightarrow \infty }(\Phi _{r_i})_{\#} V_t=\theta |P|\), where \(\Phi _{r_i}(x)=\frac{x}{r_i}\) and \((\Phi _{r_i})_{\#}\) is the usual push-forward of varifold. |P| is the unit density varifold naturally derived from P. Since \(0\in A_m\), there exists a subsequence (denoted by the same index) \(x_i\in A_{i,m}\) such that \(\lim _{i\rightarrow \infty }x_i=0\). After choosing a further subsequence, we may assume that
and
For a such choice, we also have \(\lim _{i\rightarrow \infty } \frac{\varepsilon _i}{r_i}=0\). Rescale the coordinates by \(\tilde{x}:=\frac{x}{r_i}\) and define \({\tilde{\varepsilon }}_i:=\frac{\varepsilon _i}{r_i}\rightarrow 0\). Define \(\tilde{\varphi }_{{\tilde{\varepsilon }}_i}(\tilde{x}):=\varphi _{\varepsilon _i}(r_i \tilde{x})\). We also define \({\tilde{\xi }}_{{\tilde{\varepsilon }}_i}\) and \({\tilde{h}}_{{\tilde{\varepsilon }}_i}\) as in (4.15) and (7.9) corresponding to \({\tilde{\varepsilon }}_i\) and \({\tilde{\varphi }}_{{\tilde{\varepsilon }}_i}\). Due to (6.47), we may choose a further subsequence so that
Due to Corollary 4.1 and (7.69), for any \(y\in B_2\) and \(0<r<2\), we have

as \(i\rightarrow \infty \). For \({\tilde{h}}_{{\tilde{\varepsilon }}_i}\), we have
as \(i\rightarrow \infty \), where we used (7.68), \(x_i\in A_{i,m}\), (7.61) and (4.13). If one defines a varifold \({\tilde{V}}_t^{{\tilde{\varepsilon }}_i}\) corresponding to \({\tilde{\varphi }}_{{\tilde{\varepsilon }}_i}\) as in (6.41), then one can check that \({\tilde{V}}_t^{{\tilde{\varepsilon }}_i}=(\Phi _{r_i})_{\#} V_t^{\varepsilon _i}\). Next we claim
as \(i\rightarrow \infty \), where \(\nu =(\nu _1,\ldots ,\nu _n)=\frac{\nabla {\tilde{\varphi }}_{{\tilde{\varepsilon }}_i}}{|\nabla {\tilde{\varphi }}_{{\tilde{\varepsilon }}_i}|}\). Note first that \(G_{n-1}({\mathbb R}^n)\cong {\mathbb S}^{n-1}/\{\pm 1\}\) and a function defined by \(\psi \, : \, \pm \nu \in {\mathbb S}^{n-1}/\{\pm 1\}\longmapsto 1-\nu _n^2\) is continuous. Thus for any \(\phi \in C_c({\mathbb R}^n)\), we have by (7.67)
and since \(P=\{x_n=0\}\),
In particular, (7.74) and (7.75) prove (7.73). In the following we fix this subsequence and drop the tilde for simplicity.
Assume that N is the smallest positive integer greater than \(\sigma ^{-1} \theta \), that is,
Let \(s>0\) be arbitrary. By Proposition 7.3 and (7.70), there exists \(0<b<1\) such that
for all sufficiently large i. Corresponding to s and b as well as c given by Lemma 4.1, by Proposition 7.2, we choose \(\varrho \) and L (with a restriction on \(\varepsilon _i\)). Then with \(R=2\), by Proposition 7.1, we restrict \(\varrho \) further if necessary. We use Proposition 7.1 with \(a=L\varepsilon _i\). For all large i we define
By the Besicovitch covering theorem, we obtain
The right hand side goes to 0 as \(i\rightarrow \infty \) by (7.72), (7.70), (7.73). Next we claim the following lower bound for all sufficiently large i:
for all \(L\varepsilon _i\le r\le 1\) and \(x\in G_i\). To see this, first note that the assumptions of Proposition 7.2 are all satisfied due to Lemma 4.1, (7.78) and (4.26). This proves the inequality (7.80) with \(r=L\varepsilon _i\) and with 2s replaced by s. Next the identity (7.10) with \(\zeta _2\equiv 1\), (7.11), (7.71) and (7.78) shows
after integrating over \([L\varepsilon _i,r]\). We may restrict \(\varrho \) so that \(D_1\varrho <s\). Thus (7.81) gives (7.80) for all sufficiently large i. Since \(\mu _t^{\varepsilon _i}=\Vert V_t^{\varepsilon _i}\Vert \rightarrow \theta {\mathcal H}^{n-1}\lfloor _P\), (7.80) shows that points in \(G_i\) converge uniformly to P as \(i\rightarrow \infty \).
For any \(x\in P \cap B_1\) and \(|l| \le 1-b\), we next prove
If the claim were not true, we choose N elements and set it to be Y, and apply Proposition 7.1 with \(R=1\), \(\varphi =\varphi _{\varepsilon _i}\) and \(a=L\varepsilon _i\). The property \(|y-z|>3L\varepsilon _i\) holds due to (7.20), \(\mathrm{diam}\, Y\le \varrho \) due to the uniform convergence of \(G_i\) to P, (6), (7) are due respectively to (7.78) and (7.71). Thus all the assumptions of Proposition 7.1 are satisfied and we have
for all sufficiently large i. Since \(\lim _{i\rightarrow \infty }\mu _t^{\varepsilon _i}(\{z\,:\, \mathrm{dist}\,(Y,z)<1\})=\theta \omega _{n-1}\), \(\#Y=N\) and (7.80), we obtain
Since \(\sigma N>\theta \) by definition, (7.84) is a contradiction for sufficiently small s depending only on \(\sigma \), \(\theta \) and n. Thus we proved (7.82).
To conclude the proof, we consider push-forward of
by P, \(P_{\#} {\hat{V}}_t^{\varepsilon _i}\). For any \(\phi (x,S)\in C_c((P\cap B_2)\times \mathbf{G}(n,n-1))\), we have (for all sufficiently large i)
Here \(\Lambda _{n-1} A\) denotes the Jacobian of \(A\in \mathrm{Hom}({\mathbb R}^n;{\mathbb R}^n)\) ([1]). One can check that \(|\Lambda _{n-1} P\circ (I-\nu \otimes \nu )|=|\nu _n|=\frac{|\partial _{x_n}\varphi _{\varepsilon _i}|}{|\nabla \varphi _{\varepsilon _i}|}\). Due to the varifold convergence (7.67), we have \(P_{\#}{\hat{V}}_t^{\varepsilon _i}\rightarrow P_{\#}(\theta |P|)=\theta |P|\) as \(i\rightarrow \infty \). In the following we also use
which follows from (7.70). Now we have
due to (7.77), (7.79) and (7.86). By the co-area formula [41, 10.6], we obtain
Then by the area formula [41, 12.4] applied to the map \(P\, :\, \{\varphi _{\varepsilon _i}=\tau \}\rightarrow \{x_n=0\}\), we have
Now the integrand of the right-hand side of (7.89) is \(\le N-1\) due to (7.82) for \(|x|\le 1\), and 0 otherwise. Combining (7.87)–(7.89), we finally obtain
Since \(s>0\) is arbitrary, (7.90) shows \(\theta \le (N-1)\sigma \). By (7.76), we have \(\theta = (N-1)\sigma \). \(\square \)
8 Proof of the main theorem
We finally define a family of varifolds which will be a generalized solution of (1.2). To remove the multiple of \(\sigma \), we re-define \(V_t\) as follows.
Definition 8.1
For a.e. \(t\ge 0\) when \(\mu _t\) is rectifiable and integral modulo division by \(\sigma \), let \(V_t\) be the uniquely defined integral varifold by \(\sigma ^{-1}\mu _t\). For any other \(t>0\), define \(V_t\) by \(V_t(\phi ):=\sigma ^{-1}\int _{U} \phi (x,P_0)\, d\mu _t(x)\) for \(\phi \in C_c(G_{n-1}(U))\), where \(P_0\in {G}(n,n-1)\) is an arbitrary fixed element.
With this definition, we have \(\Vert V_t\Vert =\sigma ^{-1}\mu _t\) for all \(t\ge 0\), and \(V_t\in \mathbf{IV}_{n-1}(\Omega )\) for a.e. \(t\ge 0\) by Theorem 7.1. Thus (a) of Definition 2.1 is satisfied. The condition (b) is satisfied due to (4.13). Let us consider (c). The \(L^2\) integrability of u, \(\int _0^T\int _{\Omega } |u|^2\, d\Vert V_t\Vert dt<\infty \), may be proved as in (4.42) and (4.43) once (b) is established. For h, we prove the following.
Proposition 8.1
For a.e. \(t\ge 0\), \(V_t\) has a generalized mean curvature \(h(V_t)\) and we have
for any \(\phi \in C_c(\Omega \,;\,{\mathbb R}^+)\).
Proof
Just as in the proof of Proposition 6.1, for a.e. \(t\ge 0\), we may assume (6.47) and (6.48) and there exists a subsequence \(\{V_t^{\varepsilon _{i_j}}\}_{j=1}^{\infty }\) converging to \(\sigma V_t\) (note that we re-defined \(V_t\)) with (6.46). By arguing as in the proof of Proposition 6.1, for any \(g\in C_c^1 (\Omega \,;\, {\mathbb R}^n)\), we have
The inequality and (6.46) show that the total variation \(\Vert \delta V_t\Vert \) of \(\delta V_t\) is absolutely continuous with respect to \(\mu _t=\sigma \Vert V_t\Vert \). Thus by the Radon-Nikodym theorem there exists a \(\Vert V_t\Vert \) measurable vector field \(h(V_t)\) (generalized mean curvature vector) such that
Since \(V_t\) is rectifiable, going back to the definition of countably \((n-1)\)-rectifiable set, one can show that \(C_c^1(\Omega )\) is dense in \(L^2(\Vert V_t\Vert )\). Then a standard approximation argument shows \(h(V_t)\in L^2(\Vert V_t\Vert )\) and (8.1) with \(\phi =1\). Next, given \(\phi \in C_c(\Omega \,;\,{\mathbb R}^+)\), let \(\psi _j\in C_c^1(\Omega \,;\,{\mathbb R}^+)\) be a sequence such that \(\lim _{k\rightarrow \infty }\Vert \phi - \psi _k\Vert _{C^0(\Omega )}=0\). Using \(\psi _k g\) in the proof of Proposition 6.1 and letting \(k\rightarrow \infty \), we obtain
By approximation, we obtain (8.1) from (8.4). \(\square \)
Now Proposition 8.1 combined with Lemma 4.4 and Fatou’s lemma proves (c). For the proof of (d), one point which we need to be careful about is that we may not have the whole sequence \(\{V_t^{\varepsilon _i}\}_{i=1}^{\infty }\) converging to \(V_t\) as varifold for a.e. \(t\ge 0\) even though \(\{\Vert V_t^{\varepsilon _i}\Vert \}_{i=1}^{\infty }\) converges to \(\sigma \Vert V_t\Vert =\mu _t\) for all \(t\ge 0\).
Proposition 8.2
The family of varifolds \(\{V_t\}_{t\ge 0}\) defined in Definition 8.1 is a generalized solution of (1.2).
Proof
We prove (2.10) for \(\phi \in C_c^2 (\Omega \times [0,\infty )\,;\, {\mathbb R}^+)\). For \(\phi \in C_c^1\), one can approximate \(\phi \) by a sequence of \(C_c^2\) functions and obtain the same result in the limit. First by modifying (5.11) we obtain (with the notation (7.9))
Modulo division by \(\sigma \), the left-hand side of (8.5) converges to that of (2.10) due to Proposition . The same is true for the last term of (8.5). Hence we focus on the middle 4 terms. First we approximate \(u_{\varepsilon _i}\) by a fixed smooth \({\tilde{u}}\) as follows. Given \(\epsilon >0\), we choose a large j so that \(t_2<T_j\) and
for all \(i\ge j\). This is possible since \(u_{\varepsilon _i}\) converges to u in this norm. Set \({\tilde{u}}:=u_{\varepsilon _j}\). Then we have
As in the proof of Lemma 4.4, and by (4.13) and (8.6), we have
By (8.7) and (8.8), replacing \(u_{\varepsilon _i}\) by \({\tilde{u}}\) in (8.5) produces error of \(c\epsilon ^2\). Similarly we have
Thus we will finish the proof if we prove
where we denote
By the Cauchy-Schwarz inequality, we have
where \(\hat{\phi }\in C_c(\Omega ;{\mathbb R}^+)\) is chosen so that \(\frac{|\nabla \phi |^2}{\phi }\le \hat{\phi }\). This in particular shows \(\hat{b}_i(t)-\hat{a}_i(t)\ge 0\) for \(t_1\le t\le t_2\). Using the general fact that \(\liminf _{i\rightarrow \infty } (a_i+b_i)\le \limsup _{i\rightarrow \infty }a_i+\liminf _{i\rightarrow \infty }b_i\) and Fatou’s lemma, we have
Since \({\hat{b}}_i(t)\) converges to \(\frac{1}{2}\int _{\Omega }( \hat{\phi }+\phi |{\tilde{u}}|^2 +2 |{\tilde{u}}||\nabla \phi |)\, d\mu _t\) for all \(t_1\le t\le t_2\) and bounded uniformly, from (8.12) and the dominated convergence theorem we have
Thus we may finish the proof of (8.10) via (8.13) if we prove
for a.e. \(t\in [t_1,t_2]\). Fix t such that the claim of Proposition 8.1 holds. Let \(\{\varepsilon _{i_j}\}_{j=1}^{\infty }\) be a subsequence such that
We may choose a further subsequence (denoted by the same index) such that \(V_t^{\varepsilon _{i_j}}\rightarrow \sigma {\tilde{V}}_t\) as varifold. By the Cauchy-Schwarz inequality,
where the last negative term is bounded uniformly. If \(\liminf _{j\rightarrow \infty }\int _{\Omega }\varepsilon _{i_j}\phi h_{\varepsilon _{i_j}}^2\, dx\) is infinity, we have (8.14) with the left-hand side \(=-\infty \). Thus we may assume otherwise. At this point, arguing just as in the proof of Proposition 6.1, we may prove that \({\tilde{V}}_t\lfloor _{\{\phi >0\}}\) is rectifiable and \({\tilde{V}}_t\lfloor _{\{\phi >0\}} =V_t\lfloor _{\{\phi >0\}}\). Then the argument in the proof of Proposition 8.1 shows (8.1). For the remaining three terms in \(\hat{a}_{i_j}(t)\), since \(V_t^{\varepsilon _{i_j}}\lfloor _{\{\phi >0\}}\rightarrow \sigma V_t\lfloor _{\{\phi >0\}}\) as varifold and by (6.41), we have for any \(\tilde{\phi }\in C^2_c (\{\phi >0\}\,;\, {\mathbb R}^+)\)
We may construct a sequence of approximation \(\{\tilde{\phi }_{k}\}_{k=1}^{\infty }\) such that \(\lim _{k\rightarrow \infty } \,\Vert \phi -\tilde{\phi }_k\Vert _{C^2}=0\), \(\phi \ge \tilde{\phi }_k\) and \(\mathrm{spt}\,\tilde{\phi }_k\subset \{\phi >0\}\). For such approximating sequence,
as \(k\rightarrow \infty \) uniformly in j. The error of replacing \(\tilde{\phi }=\tilde{\phi }_k\) in (8.17) by \(\phi \) can be approximated similarly. Thus (8.17) holds also for \(\phi \) instead of \(\tilde{\phi }\). Recall that we have taken a subsequence so that (8.15) holds. Combined with (8.1) and (8.17) with \(\tilde{\phi }=\phi \), and recalling that \(h\cdot \tilde{u}=h\cdot (\tilde{u}\cdot \nu )\nu \) for \(\mu _t\) a.e. by Brakke’s perpendicularity theorem [6, Ch.5], we have proved (8.14). This concludes the proof. \(\square \)
We next discuss the proof of Theorem 2.2 (2).
Proposition 8.3
There exists a further subsequence (denoted by the same index) \(\{ \varphi _{\varepsilon _i} \}_{i=1}^{\infty }\) and a function \(\varphi \in BV_{loc}(\Omega \times [0,\infty ))\cap C^{\frac{1}{2}}_{loc}([0,\infty );L^1(\Omega ))\) such that for all \(t\ge 0\),
strongly in \(L^1_{loc}(\Omega )\) and \(\varphi \) satisfies the properties of Theorem 2.2 (2). Here \(w_{\varepsilon _i}\) is defined by
Proof
Note that \(\Phi (1)=1\) and \(\Phi (-1)=0\). We compute
Fix \(T>0\). For all sufficiently large i, by (4.13) we have
for any \(t\in [0,T]\). By the similar argument we have
and the last quantity is uniformly bounded due to Lemma 4.4. By (8.20) and (8.21) \(\{w_{\varepsilon _i}\} _{i= 1}^{\infty }\) is bounded in \(BV_{loc}(\Omega \times [0,T])\). By the standard compactness theorem and a diagonal argument, there exists a subsequence (denoted by the same index) \(\{w_{\varepsilon _i}\} _{i=1}^{\infty }\) and \(w \in BV_{loc}(\Omega \times [0,\infty ))\) such that
and a.e. pointwise. We set \(\varphi :=(1+\Phi ^{-1} \circ w)/2\). We have
and by this with \(|\varphi _{\varepsilon _i}|\le 1\) we obtain
Due to the uniform bound on \(\int _{\Omega }\frac{W(\varphi _{\varepsilon _i})}{\varepsilon _i}\, dx\), one can prove by Fatou’s lemma that \(\varphi _{\varepsilon _i}\rightarrow \pm 1\) for a.e. (x, t) and hence \(\varphi =1\) or \(=0\) a.e. on \(\Omega \times [0,\infty )\). In particular, since \(\varphi =1\iff w=1\) and \(\varphi =0\iff w=0\), we have \(w=\varphi \) on \(\Omega \times [0,\infty )\). This in particular proves the \(BV_{loc}(\Omega \times [0,\infty ))\) property of \(\varphi \). For a.e. \(0\le t_1 < t_2 \le T\) and any open set \(U\subset \subset \Omega \), we have
Note that the right-hand side does not depend on U. Thus, by the similar argument to (8.21) we have with 
Since \((1+\varphi _{\varepsilon _i}(\cdot ,0))/2\rightarrow \chi _{\Omega _0}\) by (5.6), we have (2c). We assumed that \(\Omega _0\) is a bounded domain, hence, (8.23) shows that \(\varphi (\cdot ,t)\in L^1(\Omega )\) for a.e. \(t\ge 0\). Moreover, we may define \(\varphi (\cdot ,t)\) as a characteristic function for all \(t\ge 0\) so that \(\varphi \in C^{\frac{1}{2}}_{loc} ([0,\infty ) ;L^1 (\Omega ))\) due to (8.23). This proves (2a) and \(C^{\frac{1}{2}}_{loc}\) property for \(\varphi \). From (8.22), for a.e. \(t\ge 0\), \(w_{\varepsilon _i}(\cdot ,t)\rightarrow \varphi (\cdot ,t)\) in \(L^1_{loc}(\Omega )\) strongly. Using (8.23), one can show by a simple telescopic argument that the convergence is true for all \(t\ge 0\) instead of a.e. t, which proves (8.19). By the standard lower semicontinuity property of BV norm, for any \(\phi \in C_c(\Omega ;{\mathbb R}^+)\) and \(0\le t<\infty \), we have
This proves (2b).
To prove (2d), we consider the a.e. \(t\ge 0\) for which we have proved the integrality of \(V_t\). Writing \(\Vert V_t\Vert =\theta {\mathcal H}^{n-1}\lfloor _{M_t}\), we already know that \(\theta \) is integer-valued \(\Vert V_t\Vert \) a.e. and that \(M_t\) is countably \((n-1)\)-rectifiable. In addition, by (2.8), we have \(1\le \theta \le N(t)\), \({\mathcal H}^{n-1}\) a.e. on \(M_t\) for some integer N(t). The latter shows in particular that
By (2a) and (2b), we know that \(\Vert \nabla \varphi (\cdot ,t)\Vert ={\mathcal H}^{n-1}\lfloor _{\tilde{M}_t}\) for some countably \((n-1)\)-rectifiable set by De Giorgi’s theorem (see [24, 4.4]). To prove (2.16), assume the contrary. Then by the standard argument (see [41, 3.5]), there would be a point \(x\in \tilde{M}_t{\setminus } M_t\) with \(\lim _{r\downarrow 0}{\mathcal H}^{n-1}(B_r(x)\cap \tilde{M}_t)/\omega _{n-1}r^{n-1}=1\) while \(\lim _{r\downarrow 0}{\mathcal H}^{n-1}(B_r(x)\cap M_t)/\omega _{n-1}r^{n-1}=0\). Then, using also (8.24), one would then have a contradiction to Theorem 2.2 (2b). Thus we have (2.16).
To prove (2.17), we closely follow the proof of integrality again. We already know that for \(\Vert V_t\Vert \) a.e. x, we have the properties described in the proof of Theorem 7.1. By the well-known property of set of finite perimeter ([24, 3.8]), for \({\mathcal H}^{n-1}\) a.e. \(x\in \tilde{M}_t\), the blow-up limit of \(\varphi \) centered at x is supported by a half-space. For \({\mathcal H}^{n-1}\) a.e. \(x\in \Omega {\setminus } \tilde{M}_t\) (in particular on \(M_t{\setminus } \tilde{M}_t\)), the blow-up limit centered at x is a constant function with value either 0 or 1. By (8.19), up to \({\mathcal H}^{n-1}\) null set, we may assume in addition to the properties of \(\{V_t^{\varepsilon _i}\}_{i=1}^{\infty }\) in the proof of Theorem 7.1 that \(\tilde{w}_{\varepsilon _i}(\tilde{x}):=w_{\varepsilon _i}(r_i \tilde{x})\) converges strongly in \(L^1_{loc}({\mathbb R}^n)\) and pointwise \({\mathcal L}^{n}\) a.e. to \(\chi _{\{x_n\ge 0\}}\) (or \(\chi _{\{x_n\le 0\}}\)) if \(x=0\) is in \(\tilde{M}_t\), or to 1 (or 0) if \(x=0\) is in \(M_t{\setminus } \tilde{M}_t\). Since the proof for other cases is similar, we only discuss the case of \(\tilde{M}_t\) and \(\lim _{i\rightarrow \infty } \tilde{w}_{\varepsilon _i}=\chi _{\{x_n\ge 0\}}\) in the following. In terms of \(\varphi _{\varepsilon _i}\) (which is the relabeling of \(\tilde{\varphi }_{\varepsilon _i}\)), note that this means that \(\varphi _{\varepsilon _i}\) converges a.e. to \(\chi _{\{x_n\ge 0\}}-\chi _{\{x_n<0\}}\).
As one follows the proof of Theorem 7.1, the difference occurs at (7.76), where we already know that \(\theta \) is an integer multiple of \(\sigma \). So let \(N-1:=\sigma ^{-1} \theta (\ge 1)\). We want to conclude that N is an even integer. We follow the proof until (7.89), and at this point, define for \(i\in {\mathbb N}\) (and writing \(Y(\tau ,x):=\{\varphi _{\varepsilon _i}=\tau \}\cap B_1\cap G_i\cap P^{-1}(x)\))
We know from (7.82) that \({\mathcal H}^0(Y(\tau ,x))\) has to be \(\le N-1\), thus, \(B_1^{n-1} =\tilde{A}_i\cup A_i\) and
for all sufficiently large i. In (7.90), we have
where we used (8.26). Thus we have from (8.27)
By (7.20), for all sufficiently large i and any point \(x\in A_i\), the image \(\varphi _{\varepsilon _i}(B_1\cap P^{-1}(x))\) covers \([-1+b,1-b]\) at least \(N-1\) times. The each covering is monotone, thus we know that \(\varphi _{\varepsilon _i}(y)\) as y moves from \(P^{-1}(x)\cap \{x_n=-s\}\) to \(P^{-1}(x)\cap \{x_n=s\}\) along \(P^{-1}(x)\) has to go up and down between \(-1+b\) and \(1-b\) at least \(N-1\) times. Next, since \(\varphi _{\varepsilon _i}\) converges a.e. pointwise to \(\chi _{\{x_n\ge 0\}}- \chi _{\{x_n<0\}}\), by Egoroff’s Theorem and then Fubini’s Theorem, there exists \(s_1\in [s,2s]\), \(s_2\in [-2s,-s]\), \(C_1\subset B_1^{n-1}\) and \(C_2\subset B_1^{n-1}\) such that \(\varphi _{\varepsilon _i}\) converges uniformly to 1 on \(C_1\times \{s_1\}\) and to \(-1\) on \(C_2\times \{s_2\}\) while
Set \(C_3=C_1\cap C_2\) so that, by (8.29),
Now, for a contradiction, assume that N is odd. For \(x\in A_i\cap C_3\), consider the image of \(\varphi _{\varepsilon _i}\) on \(\{(x,x_n)\,:\, x_n\in [s_2,s_1]\}\). By the uniform convergence and \(x\in C_3\), for sufficiently large i, \(\varphi _{\varepsilon _i}(x,s_2)<-1+b\) and \(\varphi _{\varepsilon _i}(x,s_1)>1-b\). Since \(\varphi _{\varepsilon _i}\) is continuous, image of \(\varphi _{\varepsilon _i}\) having at least even \(N-1\) covering of \([-1+b,1-b]\) implies that there has to be at least another covering of \([-1+b,1-b]\). Thus, for each \(\tau \in [-1+b,1-b]\) and \(x\in A_i\cap C_3\), we have
Then by the coarea formula and (8.31), we have
Note that by (8.28) and (8.30), we have for sufficiently large i
Integrating (8.32) over \(A_i\cap C_3\) and (8.33) give
We may choose b so that \(\int _{-1+b}^{1-b}\sqrt{2W(\tau )}\, d\tau \ge \sigma -s\). On the other hand, by (7.67), we have
For sufficiently small s depending only on n, N and \(\sigma \), (8.34) and (8.35) lead to a contradiction. This proves N has to be even. As we mentioned, other cases of \(\varphi \) being constant (either 0 or 1) can be similarly proved. This concludes the proof of (2.17) and (2d). \(\square \)
We next verify
Proposition 8.4
The function u satisfies the property of Theorem 2.2 (3).
Proof
Consider the case \(p<n\) and fix \(T>0\). Since
\(\lim _{i\rightarrow \infty }\Vert u_{\varepsilon _i}-u\Vert _{L^q ([0,T];(W^{1,p})^n )}=0\), \(\{u_{\varepsilon _i}\}\) is a Cauchy sequence in this norm. By (2.11) with \(s=\frac{p(n-1)}{n-p}\), we have
By a standard argument, we may subtract a subsequence \(\{u_{\varepsilon _{i_j}}\}_{j=1}^{\infty }\) which converges pointwise \(\Vert V_t\Vert \times dt\) a.e. on \(\Omega \times [0,T]\) to an element of
\(L^q([0,T];(L^s (\Vert V_t\Vert ))^n)\). This limit function is uniquely determined by u independent of the approximate sequence and (2.18) holds. For \(p=n\), we apply the same argument locally for \(p^{\prime }<n\) which gives (2.18) with any \(2\le s<\infty \). For \(p>n\), the standard Sobolev inequality and the Hölder inequality prove the claim immediately. \(\square \)
To conclude the proof of Theorem 2.2 we prove
Proposition 8.5
We have \(T_1>0\) with the property described in Theorem 2.2 (4).
Proof
By integrality, we already know that \(\Vert V_t\Vert =\theta {\mathcal H}^{n-1}\lfloor _{M_t}\) for a.e. \(t\ge 0\), where \(\theta \) is integer-valued \({\mathcal H}^{n-1}\) a.e. on \(M_t\). Thus we should prove that \(\mathcal {H}^{n-1} (\{\theta (\cdot ,t) \ge 2 \})=0\) for a.e. \(0< t< T_1\) for some \(T_1>0\). We will determine the lower bound of \(T_1\) in the following. Assume there exist \(0<\hat{t}<T_1\) and \(\hat{x} \in M_{\hat{t}}\) such that \(M_{\hat{t}}\) has the approximate tangent space at \(\hat{x}\) and the density \(\theta (\hat{x},\hat{t})\ge 2\). Then it is not difficult to check that
Since \(\Vert V_0\Vert ={\mathcal H}^{n-1}\lfloor _{M_0}\) and \(M_0\) is \(C^1\), we have
for any \((x,t)\in \Omega \times (0,T_1]\), where \(T_1\) depends only on \(M_0\). We then use (4.90) with \(\varepsilon \rightarrow 0\). We then have

and the right hand side of (8.39) may be made smaller than 1 / 2 by restricting \(T_1\). Then we would have a contradiction since the left-hand side is \(\ge 1/2\) due to (8.37) and (8.38). This proves the first part of (4). We next prove \(\Vert \nabla \varphi (\cdot ,t)\Vert =\Vert V_t\Vert \) a.e. \(t\in [0,T_1]\). With the notation of (2d), for a.e. \(t\in [0,T_1]\), we have \(\Vert V_t\Vert ={\mathcal H}^{n-1}\lfloor _{M_t}\) since \(\theta =1\) a.e. from the first part. But then, by (2.17), \({\mathcal H}^{n-1}(M_t{\setminus } \tilde{M}_t)=0\) since \(\theta =1\) and odd. Thus combined with (2.16), \(\tilde{M}_t=M_t\) modulo null set, and this shows the claim. We may take \(T_1\) to be \(\sup \{t>0\,:\, V_t \text{ is } \text{ unit } \text{ density } \text{ for } \text{ a.e }. t\in [0,t]\}\). \(\square \)
As for the proof of Theorem 2.3, (1) and (3) follow from [30] and [46], respectively, which give criterion for partial \(C^{1,\zeta }\) and \(C^{2,\alpha }\) regularity. For (1), we check that [30, Sect. 3.1 (A1)–(A4)] are all satisfied. Namely, (A1) asks \(V_t\) to be unit density for a.e. t, (A2) is on the uniform density ratio upper bound which follows from (2.8), (A3) is on the integrability of u which is given by (2.18) and (A4) is the flow equation which is (2.10). If \(p<n\), the exponent of integrability of u in (2.18) has to satisfy \(\zeta :=1-(n-1)/s-2/q=2-n/p-2/q>0\), and this follows from (2.14). If \(p\ge n\), we may choose any \(s>(n-1)q/(q-2)\) in (2.18) so that we have \(0<\zeta \), and we may take sufficiently large s so that \(0<\zeta <1-2/q\) can be arbitrarily close to \(1-2/q\). This proves (1). The conclusion for \(C^{2,\alpha }\) is precisely the claim of [46]. Thus we only need to prove (2) and (4).
Proposition 8.6
The family of varifolds \(\{V_t\}_{t\ge 0}\) satisfies the property of Theorem 2.3 (2) and (4)
Proof
For a.e. \(0\le t<T_1\), we have proved that \(V_t\) has unit density property, thus we may use results in [30] for \(\{V_t\}_{0\le t<T_1}\). We first claim that there exists \(0<T_3\le T_1\) depending only on \(D_1,n,p,q,\Vert u\Vert _{L^q([0,T_1]; (W^{1,p}(\Omega ))^n)}\) (\(D_1\) corresponding to \(T_1\)) and  such that
such that

for a.e. \(0\le t\le T_3\). For the proof, we use [30, Proposition6.2]. Citing the result for the convenience of the reader, we have for \(x\in \Omega \) and \(0<r<1\)
where \(s:=\frac{p(n-1)}{n-p}\) if \(p<n\) and any \(\frac{(n-1)q}{q-2}< s<\infty \) if \(p\ge n\), \(\zeta =1-(n-1)/s-2/q\) and \(\Vert u\Vert _{L^{s,q}}:=(\int _0^t (\int _{B_r(x)} |u|^{s}\, d\Vert V_{\lambda }\Vert )^{q/s}\,d\lambda )^{1/q}\). \(\hat{\rho }_{(x,t+\epsilon )}\) is \(\rho _{(x,t+\epsilon )}\) times a radially symmetric cut-off function with support in \(B_{14r/15}(x)\) and \(=1\) near x. Note that \(\Vert u\Vert _{L^{s,q}}\) may be bounded in terms of \(D_1\) and \(\Vert u\Vert _{L^q([0,T_1];(W^{1,p}(\Omega ))^n)}\) as was done for the proof of (2.18). By restricting \(T_3\) small, we may conclude from (8.41) that
Let  be a constant to be fixed shortly and assume that there exists \(x\in \mathrm{spt}\, \Vert V_t\Vert \) such that
be a constant to be fixed shortly and assume that there exists \(x\in \mathrm{spt}\, \Vert V_t\Vert \) such that  and \(0<t\le T_3\). We may assume that \(V_t\) is unit density and has approximate tangent space with multiplicity 1 at x, since such time and point are generic. In particular, one can check that \( \lim _{\epsilon \rightarrow 0+}\int _{B_r(x)}\hat{\rho }_{(x,t+\epsilon )}(\cdot ,t)\, d\Vert V_t\Vert =1\) and (8.42) thus shows
and \(0<t\le T_3\). We may assume that \(V_t\) is unit density and has approximate tangent space with multiplicity 1 at x, since such time and point are generic. In particular, one can check that \( \lim _{\epsilon \rightarrow 0+}\int _{B_r(x)}\hat{\rho }_{(x,t+\epsilon )}(\cdot ,t)\, d\Vert V_t\Vert =1\) and (8.42) thus shows
We now choose  . Since \(B_r(x)\cap M_0=\emptyset \), the integral in (8.43) is 0. Hence we obtain
. Since \(B_r(x)\cap M_0=\emptyset \), the integral in (8.43) is 0. Hence we obtain  . If we choose a sufficiently large
. If we choose a sufficiently large  depending only on n and \(D_1\), we obtain a contradiction. This proves (8.40).
depending only on n and \(D_1\), we obtain a contradiction. This proves (8.40).
Next, since \(\mathrm{spt}\,\Vert \nabla \varphi (\cdot ,t)\Vert \subset \mathrm{spt}\,\Vert V_t\Vert \) by Theorem 2.2 (2b), (8.40) shows that \(\varphi (\cdot ,t)\) is a constant function on each connected component of  for a.e. \(0\le t\le T_3\). Since \(\varphi (\cdot ,t)\) is a characteristic function and is continuous in \(L^1\) norm with respect to time, one sees that
for a.e. \(0\le t\le T_3\). Since \(\varphi (\cdot ,t)\) is a characteristic function and is continuous in \(L^1\) norm with respect to time, one sees that

for all \(0\le t\le T_3\). We now estimate the location of \(\mathrm{spt}\,\Vert V_t\Vert \) during the short initial time. Since \(M_0\) is assumed to be \(C^1\), there exists \(r_1>0\) such that, for each \(x\in M_0\) (we may assume that x is the origin and \(T_x M_0={\mathbb R}^{n-1}\times \{0\}\) after parallel translation and orthogonal rotation), \(M_0\) is locally represented as a \(C^1\) graph \(g:B_{r_1}^{n-1}\rightarrow {\mathbb R}\) on \(B_{r_1}^{n-1}\times (-r_1,r_1)\). We take the coordinate system so that \(\Omega _0\) is located on the upper side, above the graph of g. We may also restrict \(r_1\) (uniformly on \(M_0\)) so that for all \(r\le r_1\), we have
For  , (8.44) and (8.45) show that
, (8.44) and (8.45) show that
Next we use [30, Theorem 8.7]. Using the notation there, corresponding to \(1\le E_1<\infty \), \(0<\nu <1\), p, q with \(1-(n-1)/p-2/q>0\), there exist 4 constants (\(\varepsilon _6,\sigma ,\Lambda _3,c_{19}\) in [30]) with the stated properties. Here, we use \(E_1=D_1\), \(\nu =1/2\), \(p=s\) above and the same q. The condition \(1-(n-1)/p-2/q>0\) is then satisfied. To avoid confusion in the following, we denote the constants in [30] corresponding to these choices by \(\varepsilon _{6,KT}, \sigma _{KT}, \Lambda _{3,KT},c_{19,KT}\). In the following, let \(P\in \mathbf{G}(n,n-1)\) be the projection \({\mathbb R}^n\rightarrow {\mathbb R}^{n-1}\times \{0\}\) and \(P^{\perp }\) be its orthogonal complement. We then use [30, Proposition 6.5] with
to obtain \(c_{6,KT}\) with the property that
for all \(t\in [0,\Lambda r^2]\) provided \(2\le L<\infty \) and \(rL\le 1\). Here \(c_{6,KT}\) depends only on \(s,q, D_1, \Lambda _{3,KT}\) but not on L. Given \(1>\varepsilon >0\), we may choose \(L\ge 2\) so that
and then choose \(r_2\le L^{-1}\) uniformly on \(M_0\) so that (using \(M_0\) is \(C^1\))
The inequalities (8.48)–(8.50) gives for \(r\le r_2\) and \(t\in [0,\Lambda r^2]\)
We next use [30, Proposition 6.4] on \(B_r\times [0,\Lambda r^2]\) with a slight modification. Instead of obtaining result on the time interval \([R^2/5,\Lambda ]\) as in [30], we modify the proof so that we obtain the similar estimate on the time interval  . This is achieved by a simple replacement of the cut-off function. We have a different constants which depends also on
. This is achieved by a simple replacement of the cut-off function. We have a different constants which depends also on  . Citing the result from [30, Proposition6.4], we obtain
. Citing the result from [30, Proposition6.4], we obtain

where
and where \(c_{5,KT}\) and \(c_{2,KT}\) depend only on n, s, q and  . If we restrict \(r_2\) further so that the second term of (8.53) is smaller than \(\varepsilon \), (8.51)-(8.53) with sufficiently small \(\varepsilon \) gives
. If we restrict \(r_2\) further so that the second term of (8.53) is smaller than \(\varepsilon \), (8.51)-(8.53) with sufficiently small \(\varepsilon \) gives

Combining (8.46) and (8.54), and using the \(L^1\) continuity of \(\varphi (\cdot ,t)\), we obtain
for \(t\in [0,\Lambda r^2]\). Since \(B_{r/2}^{n-1}\times [-r/2,r/2]\subset B_{4r/5}\), (8.55) shows
for \(t\in [0,\Lambda r^2]\) and \(r\le r_2\). At this point, because of the third claim of (8.56), by setting \(V_t=0\) on \(B_{r/2}^{n-1}\times ({\mathbb R}{\setminus } [-r/2,r/2])\), we may assume that \(\{V_t\}_{0\le t\le \Lambda r^2}\) satisfies (2.10) on \((B_{r/2}^{n-1} \times {\mathbb R})\times [0,\Lambda r^2]\). We next want to apply [30, Theorem 8.7] with \(R:=r/6\). For the application, we need to check the conditions (8.83)–(8.86) of [30]. The first condition (8.83), the smallness of space-time \(L^2\)-height may be achieved due to (8.51), (8.56) and by restricting \(\varepsilon \) depending on \(\varepsilon _{6,KT}\) and \(\Lambda _{3,KT}\). The second condition (8.84), the smallness of \(\Vert u\Vert \), may be achieved by simply restricting \(r_2\). Thus we need to check the last two conditions, (8.85) and (8.86) of [30]. Let \(\phi _{P,R}\) and \(\mathbf{c}\) be defined as in [30, Definition 5.1]. We need to show that (recall that we have set \(\nu =1/2\))
and
First we show (8.57). Since \(M_0\) is \(C^1\), we may restrict \(r_2\) uniformly in x so that for all \(R=r/6\le r_2/6\), we have
By (2.10), we have for \(t_1\in (3R^2/2,2R^2)\)
By (2.5) and (2.6), we may replace \(\nabla \phi _{P,R}^2\) by \(S^{\perp }(\nabla \phi _{P,R}^2)\) for \(\Vert V_t\Vert \) a.e., where S is the approximate tangent space at the point. Since \(\nabla \phi _{P,R} =P(\nabla \phi _{P,R})\) (note \(\phi _{P,R}(x)=\phi _{P,R}(P(x))\) by definition), we have
Thus, by using the Cauchy-Schwarz inequality to (8.60) and by (8.61), we obtain
The first term on the right-hand side of (8.62) can be dropped. The second term can be estimated using the Hölder inequality as
Due to the third claim of (8.56), \(\mathrm{spt}\, \Vert V_t\Vert \cap \mathrm{spt}\, \phi _{P,R}\subset B_{3R}\), for example. Thus we have \(\Vert V_t\Vert (\phi _{P,R}^2)\le D_1 \omega _{n-1}(3R)^{n-1}\). Since \(t_1\le 2R^2\), we obtain from (8.63)
For the third term of (8.62), we use [30, Lemma 11.2] (or [1, 8.13]), namely, for \(\phi =\phi _{P,R}\)
By repeating a similar argument leading to (8.62) with slightly larger test function which is 1 on \(\mathrm{spt}\, \phi _{P,R}\), one can obtain
Since we have \(\mathrm{spt}\,\Vert V_t\Vert \cap \mathrm{spt}\,\phi _{P,R}\subset B_{3R}\) and by (8.51), we obtain
Thus, by (8.66) and (8.67) and similarly estimating the last term, we obtain from (8.65) that
Combining (8.59), (8.62), (8.64) and (8.68), we obtain
Thus, by restricting \(r<r_2\) and \(\varepsilon \) in (8.69), we can guarantee that (8.57) holds. To see (8.58) holds, we use the first two claims of (8.56). Due to the unit density property, recall that for a.e. t, we have \(\Vert V_t\Vert =\Vert \nabla \{\varphi (\cdot ,t)=1\}\Vert ={\mathcal H}^{n-1}\lfloor _{\partial ^*\{\varphi (\cdot ,t)=1\}}\), where \(\partial ^{*}A\) denotes the reduced boundary of A (see [24]). Let \(\nu _n\) be the \(x_n\) component of the inward pointing unit normal vector of \(\partial ^*\{\varphi (\cdot ,t)=1\}\). We apply the generalized divergence theorem valid for sets of finite perimeter, in this case, \(\{\varphi (\cdot ,t)=1\}\cap \{x_n\le r/3\}\). Then we have for a.e. \(t\in [0,\Lambda r^2]\)
since \(\phi _{P,R}^2\) does not depend on \(x_n\) and by the definition of \(\mathbf{c}\). In particular, we have proved (8.58). Now we are ready to apply [30, Theorem 8.7]. For all sufficiently small \(\varepsilon >0\), we have seen that we may choose \(r_2\) independent of \(x\in M_0\) such that all the assumptions of [30, Theorem 8.7] hold on \((B_{r/2}\times {\mathbb R})\times [0,\Lambda r^2]\) for all \(r\le r_2\). The conclusion is that in \(B_{\sigma _{KT} R}^{n-1}\times {\mathbb R}\) and for \(t\in ( (\Lambda _{3,KT}-1/4)R^2,(\Lambda _{3,KT}+1/4)R^2)\), \(\mathrm{spt}\,\Vert V_t\Vert \) is represented as a graph \(F(\cdot ,t)\) of \(C^{1,\zeta }\) function and it is \(C^{(1+\zeta )/2}\) in time, with \(|\nabla F|+R^{-1}|F|\) bounded by a constant multiple of \(\varepsilon \) (see (8.89) of [30]). The argument up to this point can be carried out for each point on \(x\in M_0\) uniformly and \(\mathrm{spt}\,\Vert V_t\Vert \) can be covered by such graphs. This shows that for all small \(t>0\), \(\mathrm{spt}\, \Vert V_t\Vert \) is \(C^{1,\zeta }\) everywhere. We have the local graph representation as claimed in (4) and \(t^{-1/2}\mathrm{dist}\, (\mathrm{spt}\,\Vert V_t\Vert , M_0) \rightarrow 0\) as \(t\rightarrow 0\). It is possible that \(\mathrm{spt}\,\Vert V_t\Vert \) remains \(C^{1,\zeta }\) for some more time, and let \(T_2\) be the maximal time without non-\(C^{1,\zeta }\) regular point. In case that u is \(\alpha \)-Hölder continuous, the regularity criterion are the same (see [46, Theorem 3.6]) except that the constant corresponding to \(\varepsilon _{6,KT}\) may need to be smaller there. Thus, in this case, there is a short initial time interval such that \(\mathrm{spt}\,\Vert V_t\Vert \) is a \(C^{2,\alpha }\) hypersurface. This ends the proof of (2) and (4). \(\square \)
9 Final remarks
9.1 Non-uniqueness
The solution may be non-unique without having singularities of \(M_t\), as a simple example demonstrates. An example such as \(M_0=\{x_2=0\}\subset {\mathbb T}^2\) and \(u(x_1,x_2)=(0,\sqrt{|x_2|})\in (W^{1,p}({\mathbb T}^2))^2\) (\(p<2\)) has an obvious ODE-level non-uniqueness. Thus, on top of the non-uniqueness issues generally associated with singularity occurrences of the MCF, one has far richer source of possible non-uniqueness with irregular u, even though we have a local regularity theory. It is interesting to investigate how generic the uniqueness may hold for the flow in this paper with respect to the initial data and the transport term. We mention that there is a nice generic property for the MCF besides the existence of unique viscosity solution. If \(M_0\) is \(C^2\) and \(d_0\) is the signed distance function to \(M_0\), then the viscosity solution for the MCF starting from \(\{d_0=s\}\) in the sense of [11, 16] is a unit density Brakke MCF for a.e. \(s\in (-r_0,r_0)\), where \(r_0>0\) is some small number depending on \(M_0\) [18]. For such level set, a phenomena called fattening does not occur in particular. It is interesting to see if there is some generalization of this type to the setting of this paper.
9.2 Structure of singularities
There have been intensive effort to understand the nature of singularities for the MCF in recent years. A particular emphasis has been placed on the mean convex flow and we mention names of Andrews, Huisken, Sinestrari and White who analyzed structure of singularities in depth. We mention a recent work by Haslhofer and Kleiner [25] for a streamlined treatment of the regularity theory of mean convex flows as well as up-to-date references. Note that many of the techniques used by White such as the dimension reducing and stratification of singularities [47] may be used for the flow in this paper. While there may be some limitation compared to the mean convex flow, it is interesting and challenging problem to investigate the singularities in the setting of the present paper.
References
Allard, W.: On the first variation of a varifold. Ann. Math. 95(2), 417–491 (1972)
Allen, S.M., Cahn, J.W.: A macroscopic theory for antiphase boundary motion and its application to antiphase domain coarsening. Acta. Metal. 27, 1085–1095 (1979)
Almgren, F.J., Taylor, J.E., Wang, L.-H.: Curvature-driven flows: a variational approach. SIAM J. Control Optim. 31(2), 387–438 (1993)
Ambrosio, L.: Geometric Evolution Problems, Distance Function and Viscosity Solutions. Calculus of Variations and Partial Differential Equations (Pisa, 1996), pp. 5–93. Springer, Berlin (1996)
Bellettini, G.: Lecture notes on mean curvature flow: barriers and singular perturbations. Edizioni Della Normale, 12, Scuola Normale Supriore, Pisa (2014)
Brakke, K.: The Motion of a Surface by Its Mean Curvature. Mathematical Notes 20. Princeton University Press, Princeton (1978)
Bronsard, L., Kohn, R.V.: Motion by mean curvature as the singular limit of Ginzburg-Landau dynamics. J. Differ. Equ. 90(2), 211–237 (1991)
Bronsard, L., Stoth, B.: On the existence of high multiplicity interfaces. Math. Res. Lett. 3(1), 41–50 (1996)
Chen, X.: Generation and propagation of interface in reaction-diffusion equations. J. Differ. Equ. 96(1), 116–141 (1992)
Chen, X.-Y.: Dynamics of interfaces in reaction diffusion systems. Hiroshima Math. J. 21(1), 47–83 (1991)
Chen, Y.-G., Giga, Y., Goto, S.: Uniqueness and existence of viscosity solutions of generalized mean curvature flow equations. J. Differ. Geom. 33(3), 749–786 (1991)
Colding, T.H., Minicozzi II, W.P.: Minimal surfaces and mean curvature flow. Surveys in geometric analysis and relativity. Adv. Lect. Math. 20, 73–143 (2011)
de Mottoni, P., Schatzman, M.: Evolution géométric d’interfaces. C. R. Acad. Paris Sci. Sér. I Math. 309(7), 453–4558 (1989)
Ecker, K.: Regularity theory for mean curvature flow. In: Progress in Nonlinear Differential Equations and their Applications 57. Birkhäuser Boston Inc, Boston (2004)
Evans, L.C., Soner, H.M., Souganidis, P.E.: Phase transitions and generalized motion by mean curvature. Commun. Pure Appl. Math. 45(9), 1097–1123 (1992)
Evans, L.C., Spruck, J.: Motion of level sets by mean curvature I. J. Differ. Geom. 33(3), 635–681 (1991)
Evans, L.E., Spruck, J.: Motion of level sets by mean curvature II. Trans. Am. Math. Soc. 330(1), 321–332 (1992)
Evans, L.C., Spruck, J.: Motion of level sets by mean curvature IV. J. Geom. Anal. 5(1), 77–114 (1995)
Fife, P.C.: Dynamics of internal layers and diffusive interfaces. In: CBMS-NSF Reg. Conf. Ser. Applied Math., vol. 53. SIAM, Philadelphia (1988)
Giga, Y.: Surface Evolution Equations. A Level Set Approach. Monographs in Mathematics 99. Birkhäuser Verlag, Basel (2006)
Giga, Y., Goto, S.: Geometric evolution of phase-boundaries, On the evolution of phase boundaries (Minneapolis, MN, 1990–91). IMA Vol. Math. Appl. 43, 51–65 (1992)
Giga, Y., Goto, S., Ishii, H., Sato, M.-H.: Comparison principle and convexity preserving properties for singular degenerate parabolic equations on unbounded domains. Indiana Univ. Math. J. 40(2), 443–470 (1991)
Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations of Second Order, 2nd edn. Springer, Berlin (1983)
Giusti, E.: Minimal Surfaces and Functions of Bounded Variation. Monographs in Mathematics, vol. 80. Birkhäuser, Basel (1984)
Haslhofer, R., Kleiner, B.: Mean curvature flow of mean convex hypersurfaces. arXiv:1304.0926
Huisken, G.: Asymptotic behavior for singularities of the mean curvature flow. J. Differ. Geom. 31(1), 285–299 (1990)
Hutchinson, J.E., Tonegawa, Y.: Convergence of phase interfaces in the van der Waals-Cahn-Hilliard theory. Calc. Var. PDE 10(1), 49–84 (2000)
Ilmanen, T.: Convergence of the Allen-Cahn equation to Brakke’s motion by mean curvature. J. Differ. Geom. 38(2), 417–461 (1993)
Ilmanen, T.: Elliptic regularization and partial regularity for motion by mean curvature. Mem. Am. Math. Soc. 108, 520 (1994)
Kasai, K., Tonegawa, Y.: A general regularity theory for weak mean curvature flow. Calc. Var. PDE 50(1), 1–68 (2014)
Kim, Y., Lai, M.-C., Peskin, C.: Numerical simulations of two-dimensional foam by the immersed boundary method. J. Comput. Phys. 229(13), 5194–5207 (2010)
Ladyženskaja, O.A., Solonnikov, V.A., Ural’ceva, N.N.: Linear and quasi-linear equations of parabolic type. Am. Math. Soc. (1968, Translated from Russian)
Liu, C., Sato, N., Tonegawa, Y.: On the existence of mean curvature flow with transport term. Interf. Free Bound 12(2), 251–277 (2010)
Luckhaus, S., Sturzenhecker, T.: Implicit time discretization for the mean curvature flow equation. Calc. Var. PDE 3(2), 253–271 (1995)
Mantegazza, C.: Lecture Notes on Mean Curvature Flow. Progress in Mathematics, vol. 290. Birkhäuser/Springer Basel AG, Basel (2011)
Meyers, N.G., Ziemmer, W.P.: Integral inequalities of Poincaré and Wirtinger type for BV functions. Am. J. Math. 99(6), 1345–1360 (1977)
Mugnai, L., Röger, M.: Convergence of perturbed Allen-Cahn equations to forced mean curvature flow. Indiana Univ. Math. J. 60(1), 41–75 (2011)
Röger, M., Schätzle, R.: On a modified conjecture of De Giorgi. Math. Z. 254(4), 675–714 (2006)
Rubinstein, J., Sternberg, P., Keller, J.B.: Fast reaction, slow diffusion and curve shortening. SIAM J. Appl. Math. 49(1), 116–133 (1989)
Sato, N.: A simple proof of convergence of the Allen-Cahn equation to Brakke’s motion by mean curvature. Indiana Univ. Math. J. 57(4), 1743–1751 (2008)
Simon, L.: Lectures on Geometric Measure Theory. Proc. Centre Math. Anal. Austral. Nat. Univ. 3 (1983)
Soner, H.M.: Convergence of the phase-field equations to the Mullins-Sekerka problem with kinetic undercooling. Arch. Rational Mech. Anal. 131(2), 139–197 (1995)
Soner, H.M.: Ginzburg-Landau equation and motion by mean curvature. Converg. J. Geom. Anal. I. 7(3), 437–475 (1997)
Takasao, K.: Gradient estimates and existence of mean curvature flow with transport term. Differ. Integral Equ. 26(1–2), 141–154 (2013)
Tonegawa, Y.: Integrality of varifolds in the singular limit of reaction-diffusion equations. Hiroshima Math. J. 33(3), 323–341 (2003)
Tonegawa, Y.: A second derivative Hölder estimate for weak mean curvature flow. Adv. Calc. Var. 7(1), 91–138 (2014)
White, B.: Stratification of minimal surfaces, mean curvature flows, and harmonic maps. J. Reine Angew. Math. 488, 1–35 (1997)
White, B.: Evolution of curves and surfaces by mean curvature. In: Proceedings of the ICM, 1 (Beijing, 2002), pp. 525–538. Higher Ed. Press, Beijing (2002)
Ziemer, W.P.: Weakly Differentiable Functions. Springer, Berlin (1989)
Author information
Authors and Affiliations
Corresponding author
Additional information
K. Takasao is supported by the JSPS Research Fellowships for Young Scientists and the JSPS Grant-in-Aid for the JSPS fellows 12J06075 and Y. Tonegawa is partially supported by JSPS Grant-in-aid for scientific research 25247008, 26220702.
Rights and permissions
About this article

Cite this article
Takasao, K., Tonegawa, Y. Existence and regularity of mean curvature flow with transport term in higher dimensions. Math. Ann. 364, 857–935 (2016). https://doi.org/10.1007/s00208-015-1237-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00208-015-1237-5