
Abstract
We provide a mathematical analysis of the effective viscosity of suspensions of spherical particles in a Stokes flow, at low solid volume fraction \(\phi \). Our objective is to go beyond Einstein’s approximation \(\mu _{eff} = (1+\frac{5}{2}\phi ) \mu \). Assuming a lower bound on the minimal distance between the N particles, we are able to identify the \(O(\phi ^2)\) correction to the effective viscosity, which involves pairwise particle interactions. Applying the methodology developped over the last years on Coulomb gases, we are able to tackle the limit \(N \rightarrow +\infty \) of the \(O(\phi ^2)\)-correction, and provide an explicit formula for this limit when the particles centers can be described by either periodic or stationary ergodic point processes.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Setting of the Problem
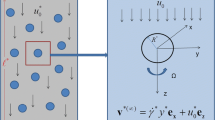
Our general concern is the computation of the effective viscosity generated by a suspension of N particles in a fluid flow. We consider spherical particles of small radius a, centered at \(x_{i,N}\), with \(N \geqq 1\) and \(1\leqq i\leqq N\). To lighten notations, we write \(x_i\) instead of \(x_{i,N}\), and \(B_i = B(x_i, a)\). We assume that the Reynolds number of the fluid flow is small, so that the fluid velocity is governed by the Stokes equation. Moreover, the particles are assumed to be force- and torque-free. If \(\mathcal {F} = \mathbb {R}^3 \setminus (\cup _i B_i)\) is the fluid domain, governing equations are
where \(\mu \) is the kinematic viscosity, while the constant vectors \(u_i\) and \(\omega _i\) are Lagrange multipliers associated to the constraints
Here, \(\sigma _\mu (u,p) := 2\mu D(u) - p I\) is the usual Cauchy stress tensor. The boundary condition at infinity will be specified later on.
We are interested in a situation where the number of particles is large, \(N \gg 1\). We want to understand the additional viscosity created by the particles. Ideally, our goal is to replace the viscosity coefficient \(\mu \) in (1.1) by an effective viscosity tensor \(\mu '\) that would encode the average effect induced by the particles. Note that such replacement can only make sense in the flow region \(\mathcal {O}\) in which the particles are distributed in a dense way. For instance, a finite number of isolated particles will not contribute to the effective viscosity, and should not be taken into account in \(\mathcal {O}\). The selection of the flow region is formalized through the following hypothesis on the empirical measure:
Note that we do not ask for regularity of the limit density f over \(\mathbb {R}^3\), but only in restriction to \(\mathcal {O}\). Hence, our assumption covers the important case \(f = \frac{1}{|\mathcal {O}|} 1_{\mathcal {O}}\).
We investigate the classical regime of dilute suspensions, in which the solid volume fraction
is small, but independent of N. In addition to (H1), we make the separation hypothesis
Let us stress that (H2) is compatible with (H1) only if the \(L^\infty \) norm of f is small enough (roughly less than \(1/c^3\)), which in turn forces \(\mathcal {O}\) to be large enough.
Our hope is to replace a model of type (1.1) by a model of the form
with the usual continuity conditions on the velocity and the stress
A priori, \(\mu '\) could be inhomogeneous (and should be if the density f seen above is itself non-constant over \(\mathcal {O}\)). It could also be anisotropic, if the cloud of particles favours some direction. With this in mind, it is natural to look for \(\mu ' = \mu '(x)\) as a general 4-tensor, with \(\sigma ' = 2 \mu ' D(u)\) given in coordinates by \(\sigma _{ij} = \mu '_{ij kl} D(u)_{kl}\). By standard classical considerations of mechanics, \(\mu '\) should satisfy the relations
namely, \(\mu '\) should define a symmetric isomorphism over the space of \(3\times 3\) symmetric matrices.
As we consider a situation in which \(\phi \) is small, we may expect \(\mu '\) to be a small perturbation of \(\mu \), and hopefully admit an expansion in powers of \(\phi \):
The main mathematical questions are:
-
Can solutions \(u_N\) of (1.1)–(1.2) be approximated by solutions \(u_{eff} = 1_{\mathbb {R}^3\setminus \mathcal {O}} u + 1_{\mathcal {O}} u'\) of (1.4)–(1.5), for an appropriate choice of \(\mu '\) and an appropriate topology ?
-
If so, does \(\mu '\) admit an expansion of type (1.6), for some k ?
-
If so, what are the values of the viscosity coefficients \(\mu _i\), \(1 \leqq i \leqq k\) ?
Let us stress that, in most articles about the effective viscosity of suspensions, it is implicitly assumed that the first two questions have a positive answer, at least for \(k=1\) or 2. In other words, the existence of an effective model is taken for granted, and the point is then to answer the third question, or at least to determine the mean values
of the viscosity coefficients. As we will see in Section 2, these mean values can be determined from the asymptotic behaviour of some integral quantities \(\mathcal {I}_N\) as \(N \rightarrow +\infty \). These integrals involve the solutions \(u_N\) of (1.1)–(1.2) with condition at infinity
where S is an arbitrary symmetric trace-free matrix.
The effective viscosity problem for dilute suspensions of spherical particles has a long history, mostly focused on the first order correction created by the suspension, that is \(k=1\) in (1.6). The pioneering work on this problem was due to Einstein [15], not mentioning earlier contributions on the similar conductivity problem by Maxwell [29], Clausius [11], Mossotti [32]. The celebrated Einstein’s formula,
was derived under the assumption that the particles are homogeneously and isotropically distributed, and neglecting the interactions between particles. In other words, the correction \(\mu _1 = \frac{5}{2} \mu \) is obtained by summing N times the contribution of one spherical particle to the effective stress. The calculation of Einstein will be seen in Section 2. It was later extended to the case of an inhomogeneous suspension by Almog and Brenner [1, p. 16], who found that
The mathematical justification of formula (1.9) came much later. As far as we know, the first step in this direction was due to Sanchez-Palencia [38] and Levy and Sanchez-Palencia [28], who recovered Einstein’s formula from homogenization techniques, when the suspension is periodically distributed in a bounded domain. Another justification, based on variational principles, is due to Haines and Mazzucato [19]. They also consider a periodic array of spherical particles in a bounded domain \(\Omega \), and define the viscosity coefficient of the suspension in terms of the energy dissipation rate:
where \(u_N\) is the solution of (1.1)–(1.2)–(1.8), replacing \(\mathbb {R}^3\) by \(\Omega \). Their main result is that
For preliminary results in the same spirit, see Keller-Rubenfeld [27]. Eventually, a recent work [21] by the second author and Di Wu shows the validity of Einstein’s formula under general assumptions of type (H1)–(H2). See also [33] for a similar recent result.
Our goal in the present paper is to go beyond this famous formula, and to study the second order correction to the effective viscosity, that is \(k=2\) in (1.6). Results on this problem have split so far into two settings: periodic distributions, and random distributions of spheres. Many different formulas have emerged in the literature, after analytical, numerical and experimental studies. In the periodic case, one can refer to the works [2, 34, 37, 42], or to the more recent work [2], dedicated to the case of spherical inclusions of another Stokes fluid with viscosity \(\tilde{\mu }\ne \mu \). Still, in the simple case of a primitive cubic lattice, the expressions for the second order correction differ. In the random case, the most reknowned analysis is due to Batchelor and Green [5], who consider a homogeneous and stationary distribution of spheres, and express the correction \(\mu _2\) as an ensemble average that involves the N-point correlation function of the process. As pointed out by Batchelor and Green, the natural idea when investigating the effective viscosity up to \(O(\phi ^2)\) is to replace the N-point correlation function by the two-point correlation function, but this leads to a divergent integral. To overcome this difficulty, Batchelor and Green develop what they call a renormalization technique, that was developed earlier by Batchelor to determine the sedimentation speed of a dilute suspension. After further analysis of the expression of the two-point correlation function of spheres in a Stokes flow [6], completed by numerical computations, they claim that under a pure strain, the particles induce a viscosity of the form
Although the result of Batchelor and Green is generally accepted by the fluid mechanics community, the lack of clarity about their renormalization technique has led to debate; see [1, 22, 35].
One main objective in the present paper is to give a rigorous and global mathematical framework for the computation of
leading to explicit formula in periodic and stationary random settings. We will adopt the point of view of the studies mentioned before: we will assume the validity of an effective model of type (1.4)–(1.5)–(1.6) with \(k=2\), and will identify the averaged coefficient \(\nu _2\).
More precisely, our analysis is divided into two parts. The first part, conducted in Section 2, has as its main consequence the following:
Theorem 1.1
Let \((x_{i})_{1 \leqq i \leqq N}\) a family of points supported in a fixed compact set \(\mathbb {R}^3\), and satisfying (H1)–(H2). For any trace-free symmetric matrix S and any \(\phi > 0\), let \(u_N\), resp. \(u_{eff}\), the solution of (1.1)–(1.2)–(1.8) with the radius a of the balls defined through (1.3), resp. the solution of (1.4)–(1.5)–(1.8) where \(\mu '\) obeys (1.6) with \(k=2\), \(\mu _1\) being given in (1.10).
If \(u_N - u_{eff} = o(\phi ^2)\) in \(H^{-\infty }_{loc}(\mathbb {R}^3)\), meaning that for all of bounded open set U, there exists \(s \in \mathbb {R}\) such that
then, necessarily, the coefficient \(\nu _2\) defined in (1.12) satisfies \(\, \nu _2 S : S = \mu \lim _{N \rightarrow +\infty } \mathcal {V}_N\) where \(\nu _2\) was defined in (1.12), and
with the Calderón–Zygmund kernel
Roughly, this theorem states that if there is an effective model at order \(\phi ^2\), the mean quadratic correction \(\nu _2\) is given by the limit of \(\mathcal {V}_N\), defined in (1.13). Note that the integral at the right-hand side of (1.13) is well-defined: \(f \in L^2(\mathbb {R}^{3})\) and \(f \rightarrow g_S \star f\) is a Calderón–Zygmund operator, therefore continuous on \(L^2(\mathbb {R}^3)\). We insist that our result is an if theorem: the limit of (1.13) does not necessarily exist for any configuration of particles \(x_i = x_{i,N}\) satisfying (H1)–(H2). In particular, it is not clear that an effective model at order \(\phi ^2\) is available for all such configurations.
Still, the second part of our analysis shows that for points associated to stationary random processes (including periodic patterns or Poisson hard core processes), the limit of the functional does exist, and is given by an explicit formula. We shall leave for later investigation the problem of approximating \(u_N\) by \(u_{eff}\) when the limit of \(\mathcal {V}_N\) exists.
Our study of functional (1.13) is detailed in Sections 3 to 5. It borrows a lot from the mathematical analysis of Coulomb gases, as developped over the last years by Sylvia Serfaty and her coauthors [9, 36, 40]. Although our paper is self-contained, we find useful to give a brief account of this analysis here. As explained in the lecture notes [41], one of its main goals is to understand what configurations of points minimize Coulomb energies of the form
where \(g(x) = \frac{1}{|x|}\) is a repulsive potential of Coulomb type, and V is typically a confining potential. It is well-known, see [41, chapter 2], that under suitable assumptions on V, the sequence of functionals \(H_N\) (seen as a functionals over probability measures by extension by \(+\infty \) outside the set of empirical measures) \(\Gamma \)-converges to the functional
Hence, the empirical measure \(\delta _N = \frac{1}{N} \sum _{i=1}^N \delta _{x_i}\) associated to the minimizer \((x_1,\dots ,x_N)\) of \(H_N\) converges weakly to the minimizer \(\lambda \) of H.
In the series of works [36, 40], see also [39] on the Ginzburg-Landau model, Serfaty and her coauthors investigate the next order term in the asymptotic expansion of \(\min _{x_1,\dots ,x_N} H_N\). A keypoint in these works is understanding the behaviour of (the minimum of)
as \(N \rightarrow +\infty \). This is done through the notion of renormalized energy. Roughly, the starting point behind this notion is the (abusive) formal identity
where \(h_N\) is the solution of \(\Delta h_N = 4 \pi (\delta _N - \lambda )\) in \(\mathbb {R}^3\). Of course, this identity does not make sense, as both sides are infinite. On one hand, the left-hand side is not well-defined: the potential g is singular at the diagonal, so that the integral with respect to the product of the empirical measures diverges. On the other hand, the right-hand side is not better defined: as the empirical measure does not belong to \(H^{-1}(\mathbb {R}^3)\), \(h_N\) is not in \(\dot{H}^1(\mathbb {R}^3)\).
Still, as explained in [41, chapter 3], one can modify this identity, and show a formula of the form
where \(h_N^\eta \) is an approximation of \(h_N\) obtained by regularization of the Dirac masses at the right-hand side of the Laplace equation: \(\Delta h_N^\eta = 4 \pi (\delta ^\eta _N - \lambda )\) in \(\mathbb {R}^3\). Note the removal of the term \(N g(\eta )\) at the right-hand side of (1.17). This term, which goes to infinity as the parameter \(\eta \rightarrow 0\), corresponds to the self-interaction of the Dirac masses: it must be removed, consistently with the fact that the integral defining \(\mathcal {H}_N\) excludes the diagonal. This explains the term renormalized energy. See [41, chapter 3] for more details.
From there (omitting to discuss the delicate commutation of the limits in N and \(\eta \) !), the asymptotics of \(\min _{x_1, \dots , x_N} \mathcal {H}_N\) can be deduced from the one of \(\min _{x_1, \dots , x_N} \int _{\mathbb {R}^3} |{\nabla }h_N^\eta |^2\), for fixed \(\eta \). The next step is to show that such minimum can be expressed as spatial averages of (minimal) microscopic energies, expressed in terms of solutions of the so-called jellium problems: see [41, chapter 4]. These problems, obtained through rescaling and blow-up of the equation on \(h_N^\eta \), are an analogue of cell problems in homogenization. More will be said in Section 4, and we refer to the lecture notes [41] for all necessary complements.
Thus, the main idea in the second part of our paper is to take advantage of the analogy between the functionals \(\mathcal {V}_N\) and \(\mathcal {H}_N\) to apply the strategy just described. Doing so, we face specific difficulties: our distribution of points is not minimizing an energy, the potential \(g_S\) is much more singular than g, the reformulation of the functional in terms of an energy is less obvious, etc. Still, we are able to reproduce the same kind of scheme. We introduce in Section 3 an analogue of the renormalized energy. The analogue of the jellium problem is discussed in Section 4. Finally, in Section 5, we are able to tackle the convergence of \(\mathcal {V}_N\), and give explicit formula for the limit in two cases: the case of a (properly rescaled) \(L \mathbb {Z}^3\)-periodic pattern of M-spherical particles with centers \(a_1\), ..., \(a_M\), and the case of a (properly rescaled) hardcore stationary random process with locally integrable two points correlation function \(\rho _2(y,z) = \rho (y-z)\). In the first case, we show that
where \(G_S\) and \(G_{S,L}\) are the whole space and \(L\mathbb {Z}^3\)-periodic kernels defined respectively in (3.12) and (5.18); see Proposition 5.4. In the special case of a primitive cubic lattice, for which \(M=L=1\), we can push the calculation further, finding that
with \(\alpha \approx 9.48\) and \(\beta \approx -2,15\), cf. Proposition 5.5 for precise expressions. Our result is in agreement with [42]. In the random stationary case, if the process has mean intensity one, we show that
These formula open the road to numerical computations of the viscosity coefficients of specific processes, and should in particular allow us to check the formula found in the literature [5, 35].
Let us conclude this introduction by pointing out that our analysis falls into the general scope of deriving macroscopic properties of dilute suspensions. From this perspective, it can be related to mathematical studies on the drag or sedimentation speed of suspensions; see [13, 23,24,25, 30] among many. See also the recent work [14] on the conductivity problem.
2 Expansion of the Effective Viscosity
The aim of this section is to understand the origin of the functional \(\mathcal {V}_N\) introduced in (1.13), and to prove Theorem 1.1. The outline is the following. We first consider the effective model (1.4)–(1.5)–(1.6). Given S a symmetric trace-free matrix, and a solution \(u_{eff}\) with condition at infinity (1.8), we exhibit an integral quantity \(\mathcal {I}_{eff} = \mathcal {I}_{eff}(S)\) that involves \(u_{eff}\) and allows us to recover (partially) the mean viscosity coefficient \(\nu _2\). In the next paragraph, we introduce the analogue \(\mathcal {I}_{N}\) of \(\mathcal {I}_{eff}\), that involves this time the solution \(u_N\) of (1.1)–(1.2) and (1.8). In brief, we show that if \(u_N\) is \(o(\phi ^2)\) close to \(u_{eff}\), then \(\mathcal {I}_{N}\) is \(o(\phi ^2)\) close to \(\mathcal {I}_{eff}\). Finally, we provide an expansion of \(\mathcal {I}_{N}\), allowing us to express \(\nu _2\) in terms of \(\mathcal {V}_N\). Theorem 1.1 follows.
2.1 Recovering the Viscosity Coefficients in the Effective Model
Let \(k \geqq 2\), \(\mu '\) satisfying (1.6), with viscosity coefficients \(\mu _i\) that may depend on x. Let S symmetric and trace-free. We denote \(u_0(x) = Sx\). Let \(u_{eff} = 1_{\mathbb {R}^3\setminus \mathcal {O}} u + 1_{\mathcal {O}} u'\) the weak solution in \(u_0+ \dot{H}^1(\mathbb {R}^3)\) of (1.4)–(1.5)–(1.8). By a standard energy estimate, one can show the expansion
where the system satisfied by \(u_{eff,i} = 1_{\mathbb {R}^3\setminus \mathcal {O}} u_i + 1_{\mathcal {O}} u'_i\) is derived by plugging the expansion in (1.4)–(1.5) and keeping terms with power \(\phi ^i\) only. Notably, we find that
together with the conditions \(u_1 = 0\) at infinity,
Similarly,
together with \(u_2 = 0\) at infinity,
Now, inspired by formula (4.11.16) in [4], we define
where n refers to the outward normal. We will show that
We first use (1.5) to write
Using the equations satisfied by \(u'_1\) and \(u'_2\), after integration by parts, we get
Plugging this last line in the expression for \(\mathcal {I}_{eff}\) yields (2.4).
We see through formula (2.4) that the expansion of \(\mathcal {I}_{eff}\) in powers of \(\phi \) gives access to \(\nu _1\), and, if \(\mu _1\) is known, it further gives access to \(\nu _2\). On the basis of the works [1, 33] and of the recent paper [21], which considers the same setting as ours, it is natural to assume that \(\mu _1\) is given by (1.10). This implies \(\nu _1 = \frac{5}{2} \mu \). With such expression of \(\mu _1\), and the form of f specified in (H1), we can check that \(u_S = (5 |\mathcal {O}|)^{-1} u_{eff,1}\) satisfies
It follows that
2.2 Recovering the Viscosity Coefficients in the Model with Particles
To determine the possible value of the mean viscosity coefficient \(\nu _2\), we must now relate the functional \(\mathcal {I}_{eff}\), based on the effective model, to a functional \(\mathcal {I}_N\) based on the real model with spherical rigid particles. From now on, we place ourselves under the assumptions of Theorem 1.1. Note that, thanks to hypothesis (H2), the spherical particles do not overlap for \(\phi \) small enough, so that a weak solution \(u_N \in u_0 + \dot{H}^1(\mathbb {R}^3)\) of (1.1)–(1.2)–(1.8) exists and is unique.
By integration by parts, for any R such that \(\mathcal {O}\Subset B_R\), we have
By analogy with (2.3), and as all particles remain in a fixed compact \(K \supset \mathcal {O}\) independent of N, we set for any R such that \(K \subset B_R\):
which again does not depend on our choice of R by integration by parts. Now, if \(u_{eff}\) and \(u_N\) are \(o(\phi ^2)\)-close in the sense of Theorem 1.1, then
Indeed, \(u_N - u_{eff}\) is a solution of a homogenenous Stokes equation outside K. By elliptic regularity, we find that \(\limsup _{N \rightarrow +\infty } \Vert u_{eff} - u_N\Vert _{H^s(K')} = 0\), for any compact \(K' \subset \mathbb {R}^3\setminus K\) and any positive s. Relation (2.9) follows.
We now turn to the most difficult part of this section, that is expanding \(\mathcal {I}_N\) in powers of \(\phi \). We aim to prove
Proposition 2.1
Let \((x_{i})_{1\leqq i \leqq N}\), satisfying (H1)–(H2). For S trace-free and symmetric, for \(\phi > 0\), let \(u_N\) the solution of (1.1)–(1.2)–(1.8) with the ball radius a defined through (1.3). Let \(\mathcal {I}_N\) as in (2.8), \(\mathcal {V}_N\) as in (1.13), and \(u_S\) the solution of (2.5). One has
As before, notation \(A_N = B_N + o(\phi ^2)\) means \(\limsup _N |A_N - B_N| = o(\phi ^2)\). Obviously, Theorem 1.1 follows directly from (2.6), (2.9) and from the proposition.
To start the proof, we set \(v_N := u_N - u_0\). Note that \(v_N \in \dot{H}^1(\mathcal F)\) still satisfies the Stokes equation outside the ball, with \(v_N = 0\) at infinity, and \(v_N = - Sx + u_i + \omega _i \times (x-x_i)\) inside \(B_i\). Moreover, taking into account the identities
and
one has for all i that
From the definition (2.8), we can re-express \(\mathcal {I}_N\) as
To obtain an expansion of \(\mathcal I_N\) in powers of \(\phi \), we will now approximate \((v_N,p_N)\) by some explicit field \((v_{app}, p_{app})\), inspired by the method of reflections. This approximation involves the elementary problem
The solution of (2.13) is explicit [18], and given by
with
The pressure is
We now introduce
where
In short, the first sum at the right-hand side of (2.17) corresponds to a superposition of N elementary solutions, meaning that the interaction between the balls is neglected. This sum satisfies the Stokes equation outside the ball, but creates an error at each ball \(B_i\), whose leading term is \(S_i x\). This explains the correction by the second sum at the right-hand side of (2.17). One could of course reiterate the process: as the distance between particles is large compared to their radius, we expect the interactions to be smaller and smaller. This is the principle of the method of reflections that is investigated in [24]. From there, Proposition 2.1 will follow from two facts. Defining
we will show first that
and then
Identity (2.19) follows from a calculation that we now detail. We define
We have
To treat \(I_b\) and \(I_d\), we rely on the following property, which is checked easily through integration by parts: for any (v, p) solution of Stokes in \(B_i\), and any trace-free symmetric matrix S, \(\mathcal {I}_i(v,p) : S = 0\). As for all i and all \(j\ne i\), \(v^s[S](\cdot -x_j)\) or \(v^s[S_j](\cdot -x_j)\) is a solution of Stokes inside \(B_i\), we deduce
As regards \(I_a\), we use the following formula, which follows from a tedious calculation [18]: for any traceless matrix S,
It follows that
This term corresponds to the famous Einstein formula for the mean effective viscosity. It is coherent with the expression (1.10) for \(\mu _1\), which implies \(\nu _1 = \frac{5}{2} \mu \).
Eventually, as regards \(I_c\), we can use (2.22) again, replacing S by \(S_i\):
with \(g_S\) defined in (1.14). In view of (2.21)–(2.23)–(2.24), to conclude that (2.19) holds, it is enough to prove
Lemma 2.2
For any \(f \in L^2(\mathbb {R}^3)\),
with \(g_S\) defined in (1.14), and \(u_S \in \dot{H}^1(\mathbb {R}^3)\) the solution of (2.5).
Proof
Note that both sides of the identity are continuous over \(L^2\): the left-hand side is continuous as the Calderón–Zygmund operator \(f \rightarrow g_S \star f\) is continuous over \(L^2\), while the right-hand side is continuous by classical elliptic estimates for the Stokes operator. By density, this is therefore enough to assume that \(f \in C^\infty _c(\mathbb {R}^3)\). We denote by \(U = (U_{ij}), Q = (Q_j)\) the fondamental solution of the Stokes operator. This means that for all j, the vector field \(U_j = (U_{ij})_{1\leqq i \leqq 3}\) and the scalar field \(Q_j\) satisfy the Stokes equation
It is well-known, (see [16, p. 239]), that
From there, one can deduce the following formula, cf [16, p. 290, equation (IV.8.14)]:
Using the Einstein convention for summation, this implies in turn that
where we have used that S is trace-free to obtain the third equality. Hence,
Note that the permutations between the derivatives and the convolution product do not raise any difficulty, as \(f \in C_c^\infty (\mathbb {R}^3)\). Now, using \(S_{kl} = S_{lk}\), and denoting by \(\mathrm{St}^{-1}\) the convolution with the fundamental solution (inverse of the Stokes operator), we get
Eventually,
This concludes the proof of the lemma. \(\square \)
Remark 2.3
By polarization of the previous identity, at least for \(f, \tilde{f}\) smooth and decaying enough, one has
The last step in proving Proposition 2.1, hence Theorem 1.1, is to show the bound (2.20). If \(w := v_N - v_{app}\), \(q := p_N - p_{app}\),
Direct verifications show that \(v_{app}\), hence w, satisfies the same force- and torque-free conditions as v. This means that for any family of constant vectors \(u_i\) and \(\omega _i\), \(1 \leqq i \leqq N\),
By a proper choice of \(u_i\) and \(\omega _i\), we find
for any family \((\tilde{u}_i, \tilde{\omega }_i)\), using this time that \(v_N\) is force- and torque-free. Let \(q \geqq 2\). By a proper choice of \((\tilde{u}_i, \tilde{\omega }_i)\), by Poincaré and Korn inequalities, one can ensure that for all i,
where
Note that the factor \(\frac{1}{a}\) at the right-hand side is consistent with scaling considerations. Moreover, by standard use of the Bogovskii operator, see [16], there exists a constant C (depending only on the constant c in (H2)) and a field \(W \in W^{1,q}(\mathcal {F})\) , zero outside \(\cup _{i=1}^N B(x_i,2a)\) satisfying
We deduce, with \(p \leqq 2\) the conjugate exponent of q, that
By well-known variational properties of the Stokes solution, \(\Vert D(v_N)\Vert _{L^2}\) minimizes \(\Vert D(v)\Vert _{L^2}\) over the set of all v in \(\dot{H}^1(\mathbb {R}^3)\) satisfying a boundary condition of the form \(v\vert _{B_i} = - Sx + u_i + \omega _i \times (x-x_i)\) for all i. By the same considerations as before, based on the Bogovski operator, we infer that
so that
Using this inequality with the first term in (2.31) and applying the Hölder inequality to the second term, we end up with
To deduce (2.20), it is now enough to prove that for all \(q > 1\), there exists a constant C independent of N or \(\phi \) such that
Indeed, taking \(q > 2\), meaning \(p < 2\), and combining this inequality with (2.32) yields (2.20), more precisely
In order to show the bound (2.33), we must write down the expression for \(w\vert _{B_i} = v_N\vert _{B_i} - v_{app}\vert _{B_i}\), where \(v_{app}\) was introduced in (2.17). A little calculation, using Taylor’s formula with an integral remainder, shows that
with \(w_i^r\) being a rigid vector field (that disappears when taking the symmetric gradient), with
and with the bilinear application
We remind that \(v^s[S]\) and v[S] were introduced in (2.14) and (2.15), while the matrices \(S_j\) are defined in (2.18). Note that the matrices \(D_i\) and \(S_i\) have the same kind of structure. More precisely, we can define for a collection \((A_1, \dots , A_N)\) of N symmetric matrices, an application
Then, \((S_1, \dots , S_N) = \mathcal {A}(S, \dots ,S)\) and \((D_1, \dots , D_N) = \mathcal {A}(S_1, \dots ,S_N) = \mathcal {A}^2(S, \dots ,S)\). Note that for any matrix A, the kernel D(v[A]), homogeneous of degree \(-3\), is of Calderón–Zygmund type. Using this property, we are able to prove in the appendix the following lemma, which is an adaptation of a result by the second author and Di Wu [21]:
Lemma 2.4
For all \(1< q < +\infty \), there exists a constant C, depending on q and on the constant c in (H2), such that, if \((A'_1, \dots , A'_N) = \mathcal {A}(A_1, \dots , A_N)\), then
We can now proceed to the proof of (2.33). Denoting \(w_i^1:= D_i (x-x_i)\), we find by the lemma that
Then, we notice that for any matrix A, \(|D(v^s[A] - v[A])(x)| = O(a^5 |x|^{-5})\). This implies that \(w^2_i := E_i (x - x_i)\) satisfies
By assumption (H2), the points \(y_i := N^{1/3} x_i\) satisfy, for all \(i \ne j\), that
In particular,
We then make use of the following easy generalization of Young’s convolution inequality: \(\forall q \geqq 1\),
Applied with \(a_{ij} = \frac{1}{(c + |y_i - y_j|)^5}\) and \(b_j = |S| + |S_j|\), together with Lemma 2.4, this yields
It remains to bound the symmetric gradient of \(w_i^3 := \mathbf {F}_i\vert _{x}(x-x_i,x-x_i)\). By the expression of \(v^s\), we get that, in \(B_i\)
Proceeding as above, we find
As \(D(w) = D(w_i^1) + D(w_i^2) + D(w_i^3)\), cf. (2.34), the previous estimates yield (2.33). This concludes the proof of Proposition 2.1, and therefore the proof of Theorem 1.1.
3 The \(\phi ^2\) Correction \(\mathcal {V}_N\) as a Renormalized Energy
We start in this section the asymptotic analysis of the viscosity coefficient
As a preliminary step, we will show that there is no loss of generality in assuming
We introduce the set
By (H1)–(H2), it is easily seen that \(N_{ext} = o(N)\) as \(N \rightarrow +\infty \). We now show
Lemma 3.1
\(\mathcal {V}_N\) is uniformly bounded in N, and
goes to zero as \(N\rightarrow +\infty \).
Proof: For any open set U, we denote \(\fint _U = \frac{1}{|U|} \int _U\).
Let \(d := \frac{c}{4} N^{-1/3} \leqq \min _{i \ne j}\frac{|x_i-x_j|}{4}\) by (H2). We write
For the first term, with \(y_i := N^{1/3} x_i\) and with (H2) in mind, that is \(|y_i - y_j| \geqq c\) for \(i \ne j\), we get that
see (1.14). This yields, by a discrete convolution inequality,
where we have used that \(\sum _{j=1}^N \frac{1}{(c+|y_i - y_j|)^4}\) is uniformly bounded in N and in the index i thanks to the separation assumption. By similar arguments, \( | II | \leqq \mathcal {C}\). As regards the last term, we notice that
where \(F_N = \sum _{i=1}^N 1_{B(x_i,d)}\). The operator \(\mathcal {T} F(x) = \int g_S(x-y) F(y) \mathrm{d}y\) is a Calderón–Zygmund operator, and therefore continuous over \(L^2\). As \(F_N^2 = F_N\) (the balls are disjoint), we find that the \(L^2\) norm of \(F_N\) is \((N d^3)^{1/2}\) and
Similarly,
It follows that \(|III| \leqq \frac{C}{N d^3}\). With our choice of d, the first part of the lemma is proved.
From there, to prove that \(\mathcal {V}_{N,ext}\) goes to zero, as \(N_{ext} = o(N)\), it is enough to show that
By symmetry, it is enough that
This can be shown by a similar decomposition as the previous one. Namely,
Proceeding as above, we find this time that
which concludes the proof. \(\square \)
Remark 3.2
By Lemma 3.1, there is no restriction assuming (3.1) when studying the asymptotic behaviour of \(\mathcal {V}_N\). Therefore, we make from now on the assumption (3.1).
As explained in the introduction, the analysis of \(\mathcal {V}_N\) will rely on the mathematical methods introduced over the last years for Coulomb gases, the core problem being the analysis of a functional of the form (1.15). We shall first reexpress \(\mathcal {V}_N\) in a similar form. More precisely, we will show
Proposition 3.3
Denoting
we have \(\mathcal {V}_N = \mathcal {W}_N + \varepsilon (N)\) where \(\varepsilon (N) \rightarrow 0\) as \(N \rightarrow \infty .\)
Remark 3.4
In the definition of \(\mathcal {W}_N\), the integrals of the form
which appear when expanding the product, are understood as
where \(\mathrm{St}\) is the Stokes operator; see (2.30) and the proof below for an explanation.
Proof
Clearly,
so that, formally,
Note that it is not obvious that this formal decomposition makes sense, because all three quantities at the right-hand side involve integrals of \(g_S(x-y)\) against product measures of the form \(\mathrm{d} \delta _N(x) f(y) \mathrm{d}y\) (or the symmetric one), which may fail to converge because of the singularity of \(g_S\). To solve this issue, a rigorous path consists in approximating, at fixed N, each Dirac mass \(\delta _{x_i}\) by a (compactly suppported) approximation of unity \(\rho _\eta (x-x_i)\), where \(\eta > 0\) is the approximation parameter and goes to zero. One can then set, for each \(\eta \), \(\delta _N^\eta (x) := \frac{1}{N} \sum _{i=1}^N \rho _\eta (x-x_i)\), leading to the rigorous decomposition
where \(\mathcal {V}_N^\eta \), \(\mathcal {W}_N^\eta \) are deduced from \(\mathcal {V}_N\), \(\mathcal {W}_N\) replacing the empirical measure by its regularization. It is easy to show that \(\lim _{\eta \rightarrow 0} \mathcal {V}_N^\eta = \mathcal {V}_N\). To conclude the proof, we shall establish the following: first,
the same limit holding for the symmetric term. In particular, (3.2) will show that \(\mathcal {W}_N = \lim _{\eta \rightarrow 0} \mathcal {W}_N^\eta \) exists, in the sense given in Remark 3.4. Then, we will prove
which, together with (3.2), will complete the proof of the proposition.
The limit (3.2) follows from identity (2.30). Indeed, for \(\eta > 0\), this formula yields
Now, we remark that due to our assumptions on f, by elliptic regularity, \(h = \mathrm{St}^{-1}(S {\nabla }f)(x)\) is \(C^1\) inside \(\mathcal {O}\). Moreover, in virtue of Remark (3.2), we can assume (3.1). Hence, as \(\eta \rightarrow 0\),
It remains to prove (3.3). In the special case where \(f \in C^r(\mathbb {R}^3)\) for some \(r \in (0,1)\) (implying that it vanishes at \({\partial }\mathcal {O}\)), classical results on Calderón–Zygmund operators yield that the function \(\int _{\mathbb {R}^3} g_S(x-y) f(x) \mathrm{d}x = \frac{8\pi }{3} S {\nabla }\cdot h(y)\) is a continuous (even Hölder) bounded function, so (H1) implies straightforwardly that
In the general case where f is discontinuous across \({\partial }\mathcal {O}\), the proof is a bit more involved. The difficulty lies in the fact that some points \(x_i\) get closer to the boundary as \(N \rightarrow +\infty \).
Let \({\varepsilon }> 0\). Under (H2), there exists \(c' > 0\) (depending on c only) such that for \(N^{-1/3} \leqq {\varepsilon }\),
Let \(\chi _{\varepsilon }: \mathbb {R}^3 \rightarrow [0,1]\) be a smooth function such that \(\chi _{\varepsilon }=1\) in a \(c' {\varepsilon }/4\) neighborhood of \({\partial }\mathcal {O}\), \(\chi _{\varepsilon }=0\) outside a \(c' {\varepsilon }/2\) neighborhood of \({\partial }\mathcal {O}\). We write
By formula (2.30), the second term reads as
with \(u_{\varepsilon }= \mathrm{St}^{-1} S {\nabla }((1- \chi _{\varepsilon }) f)\). The source term \((1- \chi _{\varepsilon }) f\) being \(C^1\) and compactly supported, \(S {\nabla }\cdot u_{\varepsilon }\) is Hölder and bounded, so that, as \(N \rightarrow +\infty \), the integral goes to zero by the weak convergence assumption (H1), for any fixed \({\varepsilon }> 0\). As regards the first term, we split it again into
where \(v_{\varepsilon }\) is this time the solution of the Stokes equation with source \(S {\nabla }(\chi _{\varepsilon }f)\). It is Hölder away from \({\partial }\mathcal {O}\), so that the last term at the right-hand side goes again to zero as \(N \rightarrow +\infty \), by assumption (H1).
It remains to handle the first term at the right-hand side. We shall show below that for a proper choice of \(\chi _{\varepsilon }\) one has
Taking advantage of this fact, we write
where we used property (3.4) to obtain the last inequality. With this bound and the convergence to zero of the other terms for fixed \({\varepsilon }\) and \(N \rightarrow +\infty \), the limit (3.3) follows.
We still have to show that \({\nabla }v^{\varepsilon }\) is uniformly bounded in \(L^\infty \) for a good choice of \(\chi _{\varepsilon }\). We borrow here to the analysis of vortex patches in the Euler equation, initiated by Chemin in 2-d [10], extended by Gamblin and Saint-Raymond in 3-d [17]. First, as \(\mathcal {O}\) is smooth, one can find a family of five smooth divergence-free vector fields \(w_1, \dots , w_5\), tangent at \({\partial }\mathcal {O}\) and non-degenerate in the sense that
see [17, Proposition 3.2]. We take \(\chi _{\varepsilon }\) in the form \(\chi (t/{\varepsilon })\), for a coordinate t transverse to the boundary, meaning that \({\partial }_t\) is normal at \({\partial }\mathcal {O}\). With this choice and the assumptions on f, one checks easily that \(\chi _{\varepsilon }f\) is bounded uniformly in \({\varepsilon }\) in \(L^\infty (\mathbb {R}^3)\) and that for all i, \(w_i \cdot {\nabla }(\chi _{\varepsilon }f)\) is bounded uniformly in \({\varepsilon }\) in \(C^0(\mathbb {R}^3) \subset C^{r-1}(\mathbb {R}^3)\) for all \(r \in (0,1)\). Hence, the norm \(\Vert \chi _{\varepsilon }f\Vert _{r,W}\) introduced in [17, p. 395], where \(W = (w_1, \dots , w_5)\), is bounded uniformly in \({\varepsilon }\).
We then split the Stokes system
into the equations
and
Let us show that \({\partial }_i{\partial }_j \Delta ^{-1} (\chi _{\varepsilon }f)\) is bounded uniformly in \({\varepsilon }\) in \(L^\infty \). Let \(\chi \in C^\infty _c(\mathbb {R}^3)\), \(\chi \geqq 0\), \(\chi =1\) near zero. Let for all \(m \in \mathbb {R}\), \(\Lambda ^m(\xi ) := (\chi (\xi ) + |\xi |^2)^{m/2}\). It is easily seen through the Fourier transform that, for all \(s \in \mathbb {N}\),
Moreover, by the calculations in [17, p. 401], replacing \(\omega \) with \(\chi _{\varepsilon }f\), we get
Combining (3.6) and (3.7), we find that
is bounded uniformly in \({\varepsilon }\) in \(L^\infty \), and consequently that
Also, by continuity of Riesz transforms over \(L^p\), we have
Now, applying \(w_k \cdot {\nabla }\) to the equation satisfied by \(\Omega _{\varepsilon }\), we obtain for all \(1 \leqq k \leqq 5\),
where \(F_{i,j,{\varepsilon }}\), \(G_{i,{\varepsilon }}\) and \(H_{\varepsilon }\) are combinations of \(\Omega _{\varepsilon }\), \(\chi _{\varepsilon }f\) and \(w_k \cdot {\nabla }(\chi _{\varepsilon }f)\). In particular, they are bounded uniformly in \({\varepsilon }\) in \(L^\infty \cap L^p\), for any \(1< p < \infty \).
For the first term at the r.h.s., we write, with the same cut-off function \(\chi \) as before,
By continuity of \( (-\Delta )^{-1} {\partial }_{i} {\partial }_j\) over \(L^2\), the first term, with low frequencies, belongs to \(H^s\) for any s, with uniform bound in \({\varepsilon }\). By the continuity of \((1-\chi (D)) (-\Delta )^{-1} {\partial }_{i} {\partial }_j\) over Hölder spaces (Coifman-Meyer theorem), the second term, with high frequencies, is uniformly bounded in \({\varepsilon }\) in \(C^{r-1}(\mathbb {R}^3)\), for any \(0< r < 1\).
For the second and third terms in (3.8), we claim that
This can be easily seen by expressing these fields as \( \sum _{i} {\partial }_{i} \Phi \star G_{i,{\varepsilon }}\) and \(\Phi \star H_{\varepsilon }\) with \(\Phi \) the fundamental solution, and by using the uniform \(L^p\) bounds on \(G_{i,{\varepsilon }}\) and \(H_{\varepsilon }\). Eventually, we find that
We conclude by [17, Proposition 3.3] that \({\nabla }v_{\varepsilon }\) is bounded in \(L^\infty (\mathbb {R}^3)\) uniformly in \({\varepsilon }\). \(\square \)
3.1 Smoothing
By Proposition 3.3, we are left with understanding the asymptotic behaviour of
The following field will play a crucial role: for U, Q defined in (2.26), we set
From (2.27), we have \( g_S = \frac{8\pi }{3} \, (S {\nabla }) \cdot G_S\), and that \(G_S\) solves, in the sense of distributions,
Moreover, from the explicit expression
and taking into account the fact that S is symmetric and trace-free, we get
Let us note that \(G_S\) is called a point stresslet in the literature, see [18]. It can be interpreted as the velocity field created in a fluid of viscosity 1 by a point particle whose resistance to a strain is given by \(-S\).
We now come back to the analysis of (3.9). Formal replacement of the function f in Lemma 2.2 by \(\delta _N - f\) yields the formula
where
satisfies
The formula (3.13) is similar to the formula (1.16), and is as much abusive, as both sides are infinite. Still, by an appropriate regularization of the source term \(S{\nabla }\sum _i \delta _{x_i}\), we shall be able in the end to obtain a rigorous formula, convenient for the study of \(\mathcal {W}_N\). This regularization process is the purpose of the present paragraph.
For any \(\eta > 0\), we denote \(B_\eta = B(0,\eta )\), and define \(G_S^\eta \) by
Note that, by homogeneity,
The field \(G_S^\eta \) belongs to \(\dot{H}^1(\mathbb {R}^3)\), and solves
where \(S^\eta \) is the measure on the sphere defined by
with \(n=\frac{x}{|x|}\) the unit normal vector pointing outward \(B_\eta \), \(\left[ F\right] := F\vert _{{\partial }B_\eta ^+} - F\vert _{{\partial }B_\eta ^-}\) the jump at \({\partial }B_\eta \) (with \({\partial }B_\eta ^+\), resp. \({\partial }B_\eta ^-\), the outer, resp. inner boundary of the ball), and \(s^\eta \) the standard surface measure on \(\partial B_\eta \). We claim the following:
Lemma 3.5
For all \(\eta > 0\), \(\, S^\eta = \mathrm{div} \, \Psi ^\eta \,\) in \(\mathbb {R}^3\), where
Moreover, \(\Psi ^\eta \rightarrow S\delta \) in the sense of distributions as \(\eta \rightarrow 0\), so that \(S^\eta \rightarrow S{\nabla }\delta \).
Proof of the lemma.
From the explicit formula (3.12) for \(G_S\) and \(p_S\), we find
so that
Using that S is trace-free, one can check from definition (3.21) that \(\hbox {div}~\Psi ^\eta = 0\) in the complement of \({\partial }B_\eta \), while
where the last equality comes from (3.22). Together with (3.20), this implies the first claim of the lemma.
To compute the limit of \(\Psi ^\eta \) as \(\eta \rightarrow 0\), we write \(\Psi ^\eta = \Psi ^\eta _1 + \Psi ^\eta _2\), with
Let \(\varphi \in C^\infty _c(\mathbb {R}^3)\) be a test function. We can write \( \langle \Psi _1^\eta , \varphi \rangle = \langle \Psi _1^\eta , \varphi (0) \rangle + \langle \Psi _1^\eta , \varphi - \varphi (0) \rangle . \) The second term is \(O(\eta )\), while the first term can be computed using the elementary formula \(\int _{B_1} x_i x_j \mathrm{d}x = \frac{4\pi }{15} \delta _{ij}\). We find
For the second term, using the homogeneity (3.18), we find again that \(\lim _{\eta } \langle \Psi _2^\eta , \varphi \rangle = \langle \Psi _2^1 , \varphi (0) \rangle \). Note that the pressure \(p_S^1\) is defined up to a constant, so that we can always select the one with zero average. With this choice, we find
where the sixth equality comes from the elementary formula \(\int _{{\partial }B_1} n_i n_j n_k n_l \mathrm{d}s^1= \frac{4\pi }{15} (\delta _{ij} \delta _{kl} + \delta _{ik} \delta _{jl} + \delta _{il} \delta _{jk})\). The result follows. \(\quad \square \)
For later purposes, we also prove here
Lemma 3.6
Proof
By (3.18), \(\int _{B_\eta } |{\nabla }G^\eta _S|^2 \mathrm{d}x = \frac{1}{\eta ^3} \int _{B_1} |{\nabla }G^1_S|^2 \mathrm{d}x\). The second term can be computed with (3.12):
\(\square \)
3.2 The Renormalized Energy
Thanks to the regularization of \(S{\nabla }\delta \) introduced in the previous paragraph, cf. Lemma 3.5, we shall be able to set a rigorous alternative to the abusive formula (3.13). Specifically, we shall state an identity involving \(\mathcal {W}_N\), defined in (3.9), and the energy of the function
This function solves
and is a regularization of \(h_N\), cf. (3.14)–(3.15).
The main result of this section is
Proposition 3.7
Proof
We assume that \(\eta \) is small enough so that \(2 \eta < \min _{i \ne j} |x_i - x_j|\). From the explicit expressions (3.14), (3.25), we find that \(h_N, h_N^\eta = O(|x|^{-2})\), \({\nabla }(h_N, h_N^\eta ) = O(|x|^{-3})\) and \(p_N, p_N^\eta = O(|x|^{-3})\) at infinity. As these quantities decay fast enough, we can perform an integration by parts to find
where we defined \(h_N^i := h_N - G_S(x-x_i)\).
As \(h_N^i\) is smooth over the support of \(S^\eta (\cdot - x_i)\), we can apply Lemma 3.5 to obtain
We can then apply Lemma 3.6 to obtain
As regards the fourth term, we notice that by our definition (3.16)–(3.17) of \(G_S^\eta \), and the fact that the balls \(B(x_i, \eta )\) are disjoint, the function \(h_N - h_N^\eta = \sum _{i} (G_S(x-x_i) - G_S^\eta (x-x_i))\) is zero over \(\cup _i {\partial }B(x_i, \eta )\), which is the support of \(\sum _i S^\eta (x-x_i)\). It follows that
where we integrated by parts, using that \(G_S - G_S^\eta \) is zero outside the balls. Let us notice that the second integral at the right-hand side converges despite the singularity of \(S{\nabla }\cdot G_S\), using the smoothness of f near \(x_i\) (by assumption (3.1) and Remark 3.2). Moreover, it goes to zero as \(\eta \rightarrow 0\). Using the homogeneity and smoothness properties of \(G_S^\eta \) inside \(B^\eta \), we also find that the first sum goes to zero with \(\eta \), resulting in
We end up with
It remains to rewrite properly the right-hand side. We first get
and, integrating by parts,
The last equality was deduced from the identity \(g_S = \frac{8\pi }{3} \, (S {\nabla }) \cdot G_S\), see the line after (3.10). The proposition follows: \(\square \)
We can refine the previous proposition as follows:
Proposition 3.8
Let \(c > 0\) the constant in (H2). There exists \(C > 0\) such that: for all \(\alpha< \eta < \frac{c}{2} N^{-1/3}\),
Proof
One has from (3.25) that
It follows that
After integration by parts,
while
We get
We note that \(G_S^\eta - G_S^\alpha \) is zero outside \(B_\eta \), while \(S^\alpha + S^\eta \) is supported in \(B_\eta \). Moreover, thanks to (H2), for \(\alpha< \eta < \frac{c}{2}\), the balls \(B(x_i, \eta )\) are disjoint. We deduce: \(a=0\).
After integration by parts, taking into account that \(G_S^\eta - G_S^\alpha \) vanishes outside \(B_\eta \), we can write \(b = b_\eta - b_\alpha \) with
By assumption (3.1), for N large enough, for all \(1\leqq i \leqq N\) and all \(\eta \leqq \frac{c}{2} N^{-1/3}\), \(B(x_i, \eta )\) is included in \(\mathcal {O}\). Hence, f is \(C^{1}\) in \(B(x_i, \eta )\), and
This results in \(b_\eta \leqq C N^2 \eta \).
Similarly, decomposing \(B(x_i, \eta ) = B(x_i, \alpha ) \cup \Big ( B(x_i, \eta ) \setminus B(x_i, \alpha ) \Big )\), we find that
using again that f is Lipschitz over \(B(x_i, \eta )\). We end up with \(b_\alpha \leqq C N^2 \eta \), and finally \(b \leqq C N^2 \eta \).
For the last term c in (3.28), we first notice that as \(G_S^\eta - G_S^\alpha \) is zero outside \(B_\eta \):
where we used Lemma 3.6 in the last line. By the definition of \(S^\alpha \), the remaining term splits into
By integration by parts, applied in \(B_\eta \setminus B_\alpha \) for the first term and in \(B_\alpha \) for the second term, we get
From there, the conclusion follows easily. \(\square \)
If we let \(\alpha \rightarrow 0\) in Proposition 3.8, combining with Propositions 3.27 and 3.3, we find
Corollary 3.9
For all \( \eta < \frac{c}{2} N^{-1/3}\),
where \({\varepsilon }(N) \rightarrow 0\) as \(N \rightarrow +\infty \).
This corollary shows that to understand the limit of \(\mathcal {V}_N\), it is enough to study the limit of
for \(\eta _N := \eta N^{-1/3}\), \(\eta < \frac{c}{2}\) fixed. For periodic and more general stationary point processes, this will be possible through a homogenization approach. This homogenization approach involves an analogue of a cell equation, called jellium in the literature on Coulomb gases. We will motivate and introduce this system in the next section.
4 Blown-up System
Formula (3.27) suggests to understand at first the behaviour of \(\int _{\mathbb {R}^3} |{\nabla }h_N^\eta |^2\) at fixed \(\eta \), when \(N \rightarrow +\infty \). To analyze the system (3.26), a useful intuition can be taken from classical homogenization problems of the form
with F(x, y) periodic in variable y, and \(\overline{F}(x) := \int _{\mathbb {T}} F(x,y) \mathrm{d}y\). Roughly, \(\Omega \) would be like \(\mathcal {O}\), the small scale \({\varepsilon }\) like \(N^{-1/3}\), the term \( \frac{1}{{\varepsilon }^3} F(x,x/{\varepsilon })\) would correspond to the sum of (regularized) Dirac masses, while the term \( \frac{1}{{\varepsilon }^3} \overline{F}\) would be an analogue of Nf. The factor \(\frac{1}{{\varepsilon }^3}\) in front of F is put consistently with the fact that \(\sum _i \delta _{x_i}\) has mass N. The dependence on x of the source term in (4.1) mimics the possible macroscopic inhomogeneity of the point distribution \(\{x_i\}\).
In the much simpler model (4.1), standard arguments show that \(h_{\varepsilon }\) behaves like
where H(x, y) satisfies the cell problem
Let us stress that substracting the term \(\frac{1}{{\varepsilon }^3} \overline{F}(x)\) in the source term of (4.1) is crucial for the asymptotics (4.2) to hold. It follows that
Note that the factor \({\varepsilon }^6\) in front of the left-hand side is coherent with the factor \(\frac{1}{N^2}\) at the right-hand side of (3.27). Note also that
Such average over larger and larger boxes may be still meaningful in more general settings, typically in stochastic homogenization.
Inspired by those remarks, and back to system (3.26), the hope is that some homogenization process may take place, at least locally near each \(x \in \mathcal {O}\). More precisely, we hope to recover \(\lim _{N} \mathcal {W}_N\) by summing over \(x \in \mathcal {O}\) some microscopic energy, locally averaged around x. This microscopic energy will be deduced from an analogue of the cell problem, called a jellium in the literature on the Ginzburg-Landau model and Coulomb gases.
4.1 Setting of the Problem
We will call point distribution a locally finite subset of \(\mathbb {R}^3\). Given a point distribution \(\Lambda \), we consider the following problem in \(\mathbb {R}^3\):
Given a solution \(H = H(y)\), \(P = P(y)\), we introduce, for any \(\eta > 0\),
which satisfies, by (3.11), (3.19), that
We remark that, the set \(\Lambda \) being locally finite, the sum at the right-hand side of (4.3) or (4.5) is well-defined as a distribution. Also, the sum at the right-hand side of (4.4) is well-defined pointwise, because \(G_S^\eta - G_S\) is supported in \(B_\eta \).
As discussed at the beginning of Section 4, we expect the limit of \(\int _{\mathbb {R}^3} |{\nabla }h_N^\eta |^2\) to be described in terms of quantities of the form
where \(K_R := (-\frac{R}{2},\frac{R}{2})^3\), for various \(\Lambda \) and solutions \(H^\eta \) of (4.5). Broadly, the energy concentrated locally around a point x should be understood from a blow-up of the original system (3.26), zooming at scale \(N^{-1/3}\) around x. Let \(x \in \mathcal {O}\) (the center of the blow-up), and \(\eta _N := \eta N^{-1/3}\), for a fixed \(\eta > 0\). If we introduce
we find that
System (4.5) corresponds to a formal asymptotics where one replaces \(\sum _{i=1}^N \delta _{z_{i,N}}\) by \(\sum _{i=1}^\infty \delta _{z_i}\), with \(\Lambda = \{z_i\}\) a point distribution. Note that, under (H2), we expect this point distribution to be well-separated, meaning that there is \(c >0\) such that: for all \(z' \ne z \in \Lambda \), \(|z'-z| \geqq c\). Still, we insist that this asymptotics is purely formal and requires much more to be made rigorous. Such rigorous asymptotics will be carried in Section 5 for various classes of point configurations.
We now collect several general remarks on the blown-up system (4.3). We start by defining a renormalized energy. For any \(L > 0\), we denote \(K_L := (-\frac{L}{2}, \frac{L}{2})^3\).
Definition 4.1
Given a point distribution \(\Lambda \), we say that a solution H of (4.3) is admissible if for all \(\eta > 0\), the field \(H^\eta \) defined by (4.4) satisfies \({\nabla }H^\eta \in L^2_{loc}(\mathbb {R}^3)\).
Given an admissible solution H and \(\eta > 0\), we say that \(H^\eta \) is of finite renormalized energy if
exists in \(\mathbb {R}\). We say that H is of finite renormalized energy if \(H^\eta \) is for all \(\eta \), and
exists in \(\mathbb {R}\).
Remark 4.2
From formula (4.4), it is easily seen that H is admissible if and only if there exists one \(\eta > 0\) with \({\nabla }H^\eta \in L^2_{loc}(\mathbb {R}^3)\).
Proposition 4.3
If \(H_1\) and \(H_2\) are admissible solutions of (4.3) satisfying, for some \(\eta > 0\), that
then \({\nabla }H_1\) and \({\nabla }H_2\) differ from a constant matrix.
Proof
We set \(H := H_1 - H_2 = H_1^\eta - H_2^\eta \). It is a solution of the homogeneous Stokes equation with
By standard elliptic regularity, any solution v of the Stokes equation in the unit ball
satisfies, for some absolute constant C,
We apply this inequality to \(v(x) = H(x_0 + R x)\), \(x_0\) arbitrary. After rescaling, we find that
As \(R \rightarrow +\infty \), the right hand-side goes to zero, which concludes the proof. \(\square \)
Proposition 4.4
Let \(\Lambda \) be a well-separated point distribution, meaning there exists \(c > 0\) such that for all \(z' \ne z \in \Lambda \), \(|z'-z| \geqq c\). Let \(0< \alpha< \eta < \frac{\min (c,1)}{4}\). Let H be an admissible solution of (4.3) such that \(H^\eta \) is of finite renormalized energy. Then, \(H^\alpha \) is also of finite renormalized energy, and
In particular, H is of finite renormalized energy as soon as \(H^\eta \) is for some \(\eta \in (0, \frac{c}{4})\), and \( \mathcal {W}({\nabla }H) = \mathcal {W}^\eta ({\nabla }H)\) for all \(\eta < \frac{\min (c,1)}{4}\).
Proof
Let \(R > 0\). As \(\Lambda \) is well-separated,
From this and the fact that the limit \(\mathcal {W}^\eta ({\nabla }H)\) exists (in \(\mathbb {R}\)), it follows that
Let \(\Omega _R\) be an open set such that \(K_{R-1} \subset \Omega _R \subset K_R\) and such that
where \(c'\) depends on c only. This implies that \(G^{\eta }(\cdot + z)\), \(G^\alpha (\cdot + z)\) are smooth at \({\partial }\Omega _R\) for all \(z \in \Lambda \), and that \(H^{\eta }\), \(H^\alpha \) are smooth at \({\partial }\Omega _R\).
We now proceed as in the proof of Proposition 3.8. We write
After integration by parts, and manipulations similar to those used to show Proposition 3.8, we end up with
Let us emphasize that the contribution of the boundary terms at \({\partial }\Omega _R\) is zero: indeed, thanks to (4.10), \((G_S^\eta - G_S^\alpha )(\cdot + z)\) is zero at \({\partial }\Omega _R\) for any \(z \in \Lambda \). Similarly,
The integral in the right-hand side was computed above, (see (3.29) and the lines after):
Back to (4.11), we find that
We deduce from this identity, (4.8) and (4.9) that
and replacing R by \(R+1\),
As \(\Omega _R \subset K_R \subset \Omega _{R+1}\), the result follows. \(\square \)
4.2 Resolution of the Blown-up System for Stationary Point Processes
As pointed out several times, we follow the strategy described in [41] for the treatment of minimizers and minima of Coulomb energies, but in our effective viscosity problem, the points \(x_{i,N}\) do not minimize the analogue \(\mathcal {V}_N\) of the Coulomb energy \(\mathcal {H}_N\). Actually, although we consider the steady Stokes equation, our point distribution may be time dependent. More precisely, in many settings, the dynamics of the suspension evolves on a timescale associated with viscous transport (scaling like \(a^2\), with a the radius of the particle), which is much smaller than the convective time scale (scaling like a). This allows us to neglect the time derivative in the Stokes equation: system (1.1)–(1.2) corresponds then to a snapshot of the flow at a given time t. Even when one is interested in the long time behaviour, the existence of an equilibrium measure for the system of particles is a very difficult problem. To bypass this issue, a usual point of view in the physics literature is to assume that the distribution of points is given by a stationary random process (whose refined description is an issue per se).
We will follow this point of view here, and introduce a class of random point processes for which we can solve (4.3). Let \(X = \mathbb {R}\) or \(X =\mathbb {T}_L := \mathbb {R}/(L\mathbb {Z})\) for some \(L > 0\). We denote by \(Point_X\) the set of point distributions in \(X^3\): an element of \(Point_X\) is a locally finite subset of \(X^3\), in particular a finite subset when \(X=\mathbb {T}_L\). We endow \(Point_X\) with the smallest \(\sigma \)-algebra \(\mathcal {P}_X\) which makes measurable all the mappings
Given a probability space \((\Omega ,\mathcal {A},P)\), a random point process \(\Lambda \) with values in \(X^3\) is a measurable map from \(\Omega \) to \(Point_X\), see [12]. By pushing forward the probability P with \(\Lambda \), we can always assume that the process is in canonical form, that is \(\Omega = Point_X\), \(\mathcal {A} = \mathcal {P}_X\), and \(\Lambda (\omega ) = \omega \).
We shall consider processes that, once in canonical form, are
-
(P1) stationary: the probability P on \(\Omega \) is invariant by the shifts
$$\begin{aligned} \tau _y : \Omega \rightarrow \Omega , \quad \omega \rightarrow y + \omega , \quad y \in X^3. \end{aligned}$$ -
(P2) ergodic: if \(A \in \mathcal {A}\) satisfies \(\tau _y(A) = A\) for all y, then \(P(A) = 0\) or \(P(A) = 1\).
-
(P3) uniformly well-separated: we mean that there exists \(c > 0\) such that almost surely, \(|z - z'| \geqq c\) for all \(z \ne z'\) in \(\omega \).
These properties are satisfied in two important contexts:
Example 4.5
(Periodic point distributions). Namely, for \(L > 0\), \(a_1, \dots , a_M\) in \(K_L\), we introduce the set \(\Lambda _0 := \{a_1, \dots , a_M\} + L \mathbb {Z}^d\). We can of course identify \(\Lambda _0\) with a point distribution in \(X^3\) with \(X = \mathbb {T}_L\). We then take \(\Omega = \mathbb {T}_L^3\), P the normalized Lebesgue measure on \(\mathbb {T}^3_L\), and set \(\Lambda (\omega ) := \Lambda _0 + \omega \). It is easily checked that this random process satisfies all assumptions. Moreover, a realization of this process is a translate of the initial periodic point distribution \(\Lambda _0\). By translation, the almost sure results that we will show below (well-posedness of the blown-up system, convergence of \(\mathcal {W}_N\)) will actually yield results for \(\Lambda _0\) itself.
Example 4.6
(Poisson hard core processes). These processes are obtained from Poisson point processes, by removing balls in order to guarantee the hypothesis (P3). For instance, given \(c > 0\), one can remove from the Poisson process all points z which are not alone in B(z, c). This leads to the so-called Matérn I hard-core process. To increase the density of points while keeping (P3), one can refine the removal process in the following way: for each point z of the Poisson process, one associates an “age” \(u_z\), with \((u_z)\) a family of i.i.d. variables, uniform over (0, 1). Then, one retains only the points z that are (strictly) the “oldest” in B(z, c). This leads to the so-called Matérn II hard-core process. Obviously, these two processes satisfy (P1) by stationarity of the Poisson process, and satisfy (P2) because they have only short range of correlations. For much more on hard core processes, we refer to [8].
The point is now to solve almost surely the blown-up system (4.3) for point processes with properties (P1)–(P2)–(P3). We first state
Proposition 4.7
Let \(\Lambda = \Lambda (\omega )\) a random point process with properties (P1)–(P2)–(P3). Let \(\eta > 0\). For almost every \(\omega \), there exists a solution \(\mathbf{H}^\eta (\omega , \cdot )\) of (4.5) in \(H^1_{loc}(X^3)\) such that
where \(D_\mathbf{H}^\eta \in L^2(\Omega )\) is the unique solution of the variational formulation (4.12) below.
Remark 4.8
In the case \(X = \mathbb {T}_L\), point distributions and solutions \(H^\eta \) over \(X^3\) can be identified with \(L\mathbb {Z}^3\)-periodic point distributions and \(L\mathbb {Z}^3\)-periodic solutions defined on \(\mathbb {R}^3\). This identification is implicit here and in all that follows.
Proof
We treat the case \(X=\mathbb {R}\), the case \(X=\mathbb {T}_L\) follows the same approach. We remind that the process is in canonical form: \(\Omega = Point_\mathbb {R}\), \(\mathcal {A} = \mathcal {P}_\mathbb {R}\), \(\Lambda (\omega ) = \omega \). The idea is to associate to (4.5) a probabilistic variational formulation. This approach is inspired by works of Kozlov [7, 26], see also [3]. Prior to the statement of this variational formulation, we introduce some vocabulary and functional spaces. First, for any \(\mathbb {R}^d\)-valued measurable \(\phi = \phi (\omega )\), we call a realization of \(\phi \) an application
For \(p \in [1,+\infty )\), \(\phi \in L^p(\Omega )\), as \(\tau _y\) is measure preserving, we have for all \(R > 0\) that \(\mathbb {E} \int _{K_R} |R_\omega [\phi ]|^p = R^3 \, \mathbb {E} |\phi |^p\). Hence, almost surely, \(R_\omega [\phi ]\) is in \(L^p_{loc}(\mathbb {R}^3)\). Also, for \(\phi \in L^\infty (\Omega )\), one finds that almost surely \(R_\omega [\phi ] \in L^\infty _{loc}(\mathbb {R}^3)\). It is a consequence of Fatou’s lemma: for all \(R > 0\),
We say that \(\phi \) is smooth if, almost surely, \(R_\omega [\phi ]\) is. For a smooth function \(\phi \), we can define its stochastic gradient \({\nabla }_\omega \phi \) by the formula
where here and below, \({\nabla }= {\nabla }_y\) refers to the usual gradient (in space). Note that \({\nabla }_\omega \phi (\tau _y \omega ) = {\nabla }R_\omega [\phi ](y)\). One can define similarly the stochastic divergence, curl, etc, and reiterate to define partial stochastic derivatives \({\partial }^\alpha _\omega \).
Starting from a function \(V \in L^p(\Omega )\), \(p \in [1,+\infty ]\) one can build smooth functions through convolution. Namely, for \(\rho \in C^\infty _c(\mathbb {R}^3)\), one can define
which is easily seen to be in \(L^p(\Omega )\), as
using that \(\tau _y\) is measure-preserving. Moreover, it is smooth: we leave to the reader to check
We are now ready to introduce the functional spaces we need. We set
We remind that \(S^\eta = \hbox {div}~\Psi ^\eta \), with \(\Psi ^\eta \) defined in (3.21). We introduce
Note that it is well-defined, as \(\Psi ^\eta \) is supported in \(B_\eta \) and \(\omega \) is a discrete subset. It is measurable: indeed, \(\Psi ^\eta \) is the pointwise limit of a sequence of simple functions of the form \(\sum _i \alpha _i 1_{A_i}\), where \(A_i\) are Borel subsets of \(\mathbb {R}^3\). As
is measurable by definition of the \(\sigma \)-algebra \(\mathcal {A}\), we find that \(\mathsf {\Pi }^\eta \) is. Moreover, as \(\Lambda \) is uniformly well-separated, one has \(|\mathsf {\Pi }^\eta (\omega )| \leqq C \Vert \Psi ^\eta \Vert _{L^\infty }\) for a constant C that does not depend on \(\omega \), so that \(\mathsf {\Pi }^\eta \) belongs to \(L^\infty (\Omega )\).
We now introduce the variational formulation: find \(D_\mathbf{H}^\eta \in \mathcal {V}_\sigma \) such that for all \(D_\phi \in \mathcal {V}_\sigma \),
As \(\mathcal {V}_\sigma \) is a closed subspace of \(L^2(\Omega )\), existence and uniqueness of a solution comes from the Riesz theorem.
It remains to build a solution of (4.5) almost surely, based on \(D_\mathbf{H}^\eta \). Let \(\phi _k = \phi _k(\omega )\) a sequence in \(\mathcal {D}_\sigma \) such that \({\nabla }_\omega \phi _k\) converges to \(D_\mathbf{H}^\eta \) in \(L^2(\Omega )\). Let \(\rho \in C^\infty _c(\mathbb {R}^3)\). It is easily seen that \(\rho \star \phi _k\) also belongs to \(\mathcal {D}_\sigma \) and that \({\partial }^\alpha _\omega {\nabla }_\omega (\rho \star \phi _k) = {\partial }^\alpha _\omega (\rho \star {\nabla }_\omega \phi _k)\) converges to the smooth function \({\partial }^\alpha _\omega (\rho \star D_\mathbf{H}^\eta )\) in \(L^2(\Omega )\), for all \(\alpha \). In particular, as \({\nabla }_\omega \times {\nabla }_\omega (\rho \star \phi _k) = 0\), we find that \({\nabla }_\omega \times (\rho \star D_\mathbf{H}^\eta ) = 0\). Applying the realization operator \(R_\omega \), we deduce that
We recall that \(R_\omega [D_\mathbf{H}^\eta ]\) belongs almost surely to \(L^2_{loc}(\mathbb {R}^3)\), so that \({\nabla }\times R_\omega [D_\mathbf{H}^\eta ]\) is well-defined in \(H^{-1}_{loc}(\mathbb {R}^3)\). Taking \(\rho = \rho _n\) an approximation of the identity, and sending n to infinity, we end up with \({\nabla }\times R_\omega [D_\mathbf{H}^\eta ] = 0\) in \(\mathbb {R}^3\). As curl-free vector fields on \(\mathbb {R}^3\) are gradients, it follows that almost surely, there exists \(\mathbf{H}^\eta = \mathbf{H}^\eta (\omega , y)\) with
In the case \(X = \mathbb {T}_L\), one can show that the mean of \(R_\omega [D_\mathbf{H}^\eta ]\) is almost surely zero, so that the same result holds. In addition, because the matrices \({\nabla }_\omega \phi \), \(\phi \in \mathcal {D}_\sigma \), have zero trace, the same holds for \(D_\mathbf{H}^\eta \). Hence,
One still has to prove that the first equation of (4.5) is satisfied. Therefore, we use (4.12) with test function \(D_\phi = {\nabla }_\omega \phi \), where the smooth function \(\phi \) is of the form
Note that for smooth functions \(\varphi , \tilde{\varphi }\), a stochastic integration by parts formula holds:
Thanks to this formula, we may write
Similarly, we find
As this identity is valid for all smooth test fields \(\varphi \), we end up with
Proceeding as above, we find that, almost surely,
which can be written as
It follows that there exists \(\mathbf{P}^\eta = \mathbf{P}^\eta (\omega ,y)\) such that
which concludes the proof of the proposition. \(\square \)
Corollary 4.9
For random point processes with properties (P1)–(P2)–(P3), there exists almost surely a solution H of (4.3) with finite renormalized energy and such that for all \(\eta > 0\), the gradient field \({\nabla }H^\eta \), where \(H^\eta \) is given by (4.4), coincides with the gradient field \({\nabla }\mathbf{H}^\eta \) of Proposition 4.7. Moreover,
where \(m := \mathbb {E}|\Lambda \cap K_1|\) is the mean intensity of the point process, the expression at the right-hand side being actually constant for \(\eta \) small enough.
Proof
By the definition of the mean intensity and by property (P2), which allows us to apply the ergodic theorem (cf. [12, Corollary 12.2.V]), we have, almost surely, that
Let \(\eta _0 < \frac{\min (c,1)}{4}\) fixed, and \(\mathbf{H}^{\eta _0}\) given by the previous proposition. We set
It is clearly an admissible solution of (4.3). By Proposition 4.4, in order to show that H has almost surely finite renormalized energy, it is enough to show that for one \(\eta < \frac{\min (c,1)}{4}\), almost surely, the function \(H^\eta \) given by (4.4), namely,
has finite renormalized energy. This holds for \(\eta = \eta _0\), as \(H^{\eta _0} = \mathbf{H}^{\eta _0}\) and the ergodic theorem applies. We then notice that
We remark that \(G^\eta _S- G_S^{\eta _0} = 0\) outside \(B_{\max (\eta ,\eta _0)}\), so that the sum at the r.h.s. has only a finite number of non-zero terms. In the same way as we proved that the function \(\mathsf {\Pi }^\eta \) belongs to \(L^\infty (\Omega )\), we get that \(\sum _{z \in \omega } {\nabla }(G^\eta _S- G_S^{\eta _0})(z)\) defines an element of \(L^\infty (\Omega )\). Hence, by the ergodic theorem, we have, almost surely, that
Combining this with (4.13) and Proposition 4.4, we obtain the formula for \(\mathcal {W}({\nabla }H)\).
The last step is to prove that for all \(\eta > 0\), \({\nabla }H^\eta = {\nabla }\mathbf{H}^\eta \) almost surely. As a consequence of the ergodic theorem, one has, almost surely, that
Reasoning as in the proof of Proposition 4.3, we find that their gradients differ by a constant:
Applying again the ergodic theorem, we get that almost surely \( \mathbb {E}D_{H}^\eta = \mathbb {E}D_\mathbf{H}^\eta + C(\omega )\). As \(D_\mathbf{H}^\eta \) belongs to \(\mathcal {V}_\sigma \), its expectation is easily seen to be zero. To conclude, it remains to prove that \(\mathbb {E}D_{H}^\eta = \mathbb {E}\sum _{z \in \omega } {\nabla }(G_S^\eta - G_S^{\eta _0})(z)\) is zero. Using stationarity, we write, for all \(R > 0\),
We remark that for all z outside a \(\max (\eta , \eta _0)\)-neighborhood of \({\partial }K_R\), \( \int _{K_R} {\nabla }(G_S^\eta - G_S^{\eta _0})(z+\cdot ) = \int _{{\partial }K_R} n \otimes (G_S^\eta - G_S^{\eta _0})(z+\cdot ) = 0\). It follows from the separation assumption and the \(L^\infty \) bound on \({\nabla }(G_S^\eta - G_S^{\eta _0})\) that
\(\square \)
5 Convergence of \(\mathcal {V}_N\)
This section concludes our analysis of the quadratic correction to the effective viscosity. From Theorem 1.1, we know that this quadratic correction should be given by the limit of \(\mathcal {V}_N\) as N goes to infinity, where \(\mathcal {V}_N\) was introduced in (1.13). We show here that the functional \(\mathcal {V}_N\) has indeed a limit, when the particles are given by the kind of stationary point processes seen in Section 4.
5.1 Proof of Convergence
Let \({\varepsilon }> 0\) a small parameter, and \(\Lambda = \Lambda (\omega )\) a random point process with properties (P1)–(P2)–(P3): stationarity, ergodicity, and uniform separation. As seen in Examples 4.5 and 4.6, this setting covers the case of periodic patterns of points as well as classical hard core processes. We set \(N = N({\varepsilon })\) the cardinal of the set
where \(\check{\Lambda } := -\Lambda \) and where we label the elements arbitrarily. Note that N depends on \(\omega \), although it does not appear explicitly. From the fact that \(\Lambda \) is uniformly well-separated and from the ergodic theorem (cf. [12, Corollary 12.2.V]), we can deduce that, almost surely,
so that we shall note indifferently \(\lim _{{\varepsilon }\rightarrow 0}\) or \(\lim _{N \rightarrow +\infty }\). Note that, strictly speaking, \(N = N({\varepsilon })\) does not necessarily cover all integer values when \({\varepsilon }\rightarrow 0\), but this is no difficulty.
More generally, for all \(\varphi \) smooth and compactly supported in \(\mathbb {R}^3\), ergodicity implies
which shows that (H1) is satisfied with \(f = \frac{1}{|\mathcal {O}|} 1_{\mathcal {O}}\). The hypothesis (H2) is also trivially satisfied, as well as (3.1). Our main theorem is
Theorem 5.1
Almost surely,
with m the mean intensity of the process, and H the solution of (4.3) given in Corollary 4.9.
The rest of the paragraph is dedicated to the proof of this theorem.
Let \(\eta \) satisfying \(\eta < \frac{\min (c,1)}{4}\) and \(\eta < \frac{c}{2} (m|\mathcal {O}|)^{-1/3}\). By (5.1), it follows that, almost surely, for \({\varepsilon }\) small enough, \({\varepsilon }\eta < \frac{c}{2} N^{-1/3}\). By Corollary 3.9,
We denote \(h_{\varepsilon }^\eta := h_N^{\eta {\varepsilon }}\), see (3.25)–(3.26). Let H be the solution of the blown-up system (4.3) provided by Corollary 4.9, \(H^\eta \) given in (4.4), and \(P^\eta \) as in (4.5). We define new fields \(\bar{h}^\eta _{\varepsilon }, \bar{p}^\eta _{\varepsilon }\) by the following conditions: \(\bar{h}^\eta _{\varepsilon }\in \dot{H}^1(\mathbb {R}^3)\),
We omit indication of the dependence in \(\omega \) to lighten notations. We claim
Proposition 5.2
Proposition 5.3
Note that, by Proposition 4.4 and our choice of \(\eta \), \(\mathcal {W}^\eta ({\nabla }H)\) = \(\mathcal {W}({\nabla }H)\). Theorem 5.1 follows directly from this fact, (5.2), and the propositions.
Proof of Proposition 5.2.
We know from Corollary 4.9 that
From this and relation (5.1), we see that the proposition amounts to the statement
A simple application of the ergodic theorem shows that, almost surely,
It remains to show that
It will be deduced from the well-known fact that the Stokes solution \(\bar{h}^\eta _{\varepsilon }\) minimizes
among divergence-free fields \(\bar{h}\) in \(\mathrm{ext} \,\mathcal {O}\) satisfying the Dirichlet condition \(\bar{h}\vert _{{\partial }\mathcal {O}} = \bar{h}^\eta _{\varepsilon }\vert _{{\partial }\mathcal {O}}\).
First, we prove that the \(H^{1/2}(\partial \mathcal {O})\)-norm of \({\varepsilon }^3 \bar{h}^\eta _{\varepsilon }\) goes to zero. In this perspective, we introduce for all \(\delta > 0\) a function \(\chi _\delta \) with \(\chi _\delta = 1\) in a \(\frac{\delta }{2}\)-neighborhood of \({\partial }\mathcal {O}\), \(\chi _\delta = 0\) outside a \(\delta \)-neighborhood of \({\partial }\mathcal {O}\). We write
By the ergodic theorem and Corollary 4.9, \({\varepsilon }^3 {\nabla }\bar{h}^\eta _{\varepsilon }= {\nabla }_y H^\eta (\frac{\cdot }{{\varepsilon }})\) converges almost surely weakly in \(L^2(\mathcal {O})\) to \(\mathbb {E}D_{\mathbf {H}^{\eta }} = 0\). Let \(\varphi \in L^2(\mathcal {O})\). By standard results on the divergence operator, cf [16], there exists \(v \in H^1_0(\mathcal {O})\) with \(\hbox {div}~v = \varphi - \fint _{\mathcal {O}} \varphi \), \(\Vert v\Vert _{H^1(\mathcal {O})} \leqq C_\mathcal {O}\Vert \varphi \Vert _{L^2(\mathcal {O})}\). As by definition \(\bar{h}^\eta _{\varepsilon }\) has zero mean over \(\mathcal {O}\), it follows that
Hence, \({\varepsilon }^3 \bar{h}^\eta _{\varepsilon }\) converges weakly to zero in \(H^1(\mathcal {O})\) and therefore strongly in \(L^2(\mathcal {O})\). It follows that, for any given \(\delta \),
To conclude, it is enough to show that \(\limsup _{{\varepsilon }\rightarrow 0} \Vert {\varepsilon }^3 {\nabla }\bar{h}^\eta _{\varepsilon }\chi _\delta \Vert _{L^2(\mathcal {O})}\) goes to zero as \(\delta \rightarrow 0\). This comes from
Finally, \(\Vert {\varepsilon }^3 \bar{h}^\eta _{\varepsilon }\Vert _{H^{1/2}({\partial }\mathcal {O})} = o(1)\). To conclude that (5.3) holds, we notice that
By classical results on the right inverse of the divergence operator, see [16], one can find for R such that \(\mathcal {O}\Subset B(0,R)\) a solution \(\bar{h}\) of the equation
and such that
Extending \(\bar{h}\) by zero outside B(0, R), we find
This concludes the proof of the proposition. \(\quad \square \)
Proof of Proposition 5.3.
Let \(h := h_{\varepsilon }^\eta - \bar{h}_{\varepsilon }^\eta \). It satisfies an equation of the form
where the various source terms will now be defined. First,
Here, the value of the stress is taken from \(\mathrm{ext} \,\mathcal {O}\), n refers to the normal vector pointing outward \(\mathcal {O}\) and \(s_{{\partial }}\) refers to the surface measure on \({\partial }\mathcal {O}\). We remind that \(\bar{h}^\eta _{\varepsilon }\in \dot{H}^1(\mathbb {R}^3)\) does not jump at the boundary, but its derivatives do, so that one must specify from which side the stress is considered. Then,
with the value of the stress taken from \(\mathcal {O}\), and n as before. Noticing that \( S {\nabla }f = - \frac{1}{|\mathcal {O}|} Sn \, s_{\partial }\), we finally set
where
Note that the term \(R_3\) is supported in pieces of spheres. From (3.20), we know that for all \(\eta > 0\),
This allows us to show that the integral of \(R_2+R_3\) is zero. Indeed,
so that
The point is now to prove that \({\varepsilon }^3 \Vert {\nabla }h\Vert _{L^2(\mathbb {R}^3)} \rightarrow 0\) as \({\varepsilon }\rightarrow 0\). From a simple energy estimate, and taking (5.7) into account, we find
As \((\bar{h}_{\varepsilon }^\eta , \bar{p}_{\varepsilon }^\eta )\) is a solution of a homogeneous Stokes equation in \(\mathrm{ext} \,\mathcal {O}\), we get, from an integration by parts, that
using the Cauchy–Schwarz inequality and the bound (5.5).
We now wish to show that
for some \(\nu ({\varepsilon })\) going to zero with \({\varepsilon }\). More precisely, we will prove that for any divergence-free \(\varphi \in \dot{H}^1(\mathbb {R}^3)\),
which implies (5.10), by Poincaré inequality. We first notice that
where
Then, we use the relation \(S^\eta = \hbox {div}~\Psi ^\eta \), cf. Lemma 3.5 and integrate by parts to get
For a fixed \(\eta \), there is a constant C (depending on \(\eta \)) such that
For the last inequality, we have used that all \(x_i\)’s with \(i \in I_{\varepsilon }^\eta \) belong to an \({\varepsilon }\)-neighborhood of \({\partial }\mathcal {O}\), so that \(|I_{\varepsilon }^\eta | = O({\varepsilon }^{-2})\). Hence,
Let
We claim that \(\mathbb {E}\int _{K_1} F_3 = 0\). Indeed, by stationarity, for all \(R > 0\)
We have used crucially the fact that \(\Psi ^\eta \) is supported in \(B(0,\eta )\). The \(O(\frac{1}{R})\)-term is associated to the points \(z \in \Lambda \) which lie in a \(\delta \)-neighborhood of \({\partial }K_R\): see the end of the proof of Corollary 4.9 for similar reasoning. By sending R to infinity, we find that, almost surely,
The last step is to compute \(\int _{B(0,\eta )} \Psi ^\eta \), which is independent of \(\eta \) by homogeneity. It is in particular equal to \(\lim _{\eta \rightarrow 0} \langle \Psi ^\eta , 1 \rangle \), a limit that was already computed in the proof of Lemma 3.5, cf. (3.23)–(3.24). We get \(\int _{B(0,\eta )} \Psi ^\eta = S\), which shows that \(\mathbb {E}F_3 = 0\).
By the definition of \(F^{\varepsilon }_3\), we can write
where the last inequality follows from (5.1). Plugging this inequality in (5.14), and combining with (5.12), we see that to derive (5.11), it remains to show that almost surely, for all divergence-free fields \(\varphi \in H^1(\mathcal {O})\),
where \(F^{\varepsilon }:= F_2^{\varepsilon }+F_3^{\varepsilon }\). Notice that \(\hbox {div}~(F_2^{\varepsilon }+ F_3^{\varepsilon }) = 0\). We introduce again the functions \(\chi _\delta \), \(\delta > 0\), seen above. We get
For the last term, we take into account that \(\varphi \) is divergence-free, so that the pressure disappears. We find that
As seen in (5.4), we have
and similarly,
For the first term, we write
We know that \({\varepsilon }^3 D(\bar{h}^\eta _{\varepsilon })\) goes weakly to zero in \(L^2(\mathcal {O})\), so that it converges strongly to zero in \(H^{-1}(\mathcal {O})\). As \({\nabla }\chi _\delta \otimes \varphi \) belongs to \(H^1_0(\mathcal {O})\), we find that, for a fixed \(\delta \),
Similarly, as \(\mathbb {E}F_3 = 0\), \(F_3^{\varepsilon }\) converges weakly to zero in \(L^2(\mathcal {O})\) and we get
The last step is to prove that \({\varepsilon }^3 \overline{p}^\eta _{\varepsilon }\) converges weakly to zero in \(L^2(\mathcal {O})\), which will yield
As above, for \(\phi \in L^2(\mathcal {O})\), we introduce \(v \in H^1_0(\mathcal {O})\) such that \(\hbox {div}~v = \phi - \fint _\mathcal {O}\phi \), \(\Vert v\Vert _{H_1(\mathcal {O})} \leqq C_\mathcal {O}\Vert \phi \Vert _{L^2(\mathcal {O})}\). Then, using the equation satisfied by \(\overline{p}_{\varepsilon }^\eta \) in \(\mathcal {O}\),
we find, after integration by parts, that
This concludes the proof of (5.16), of Proposition 5.3 and of the theorem. \(\square \)
5.2 Formula for Periodic Point Distributions
Theorem 5.1 gives the limit of \(\mathcal {V}_N\) for properly rescaled stationary and ergodic point processes, under uniform separation of the points. Such setting includes periodic point distributions, as well as Poisson hard core processes. We focus here on the periodic case, for which further explicit formula can be given. For \(L > 0\), we consider distinct points \(a_1, \dots , a_M\) in \(K_L\), and set \(\Lambda _0 := \{a_1, \dots , a_M\} + L \mathbb {Z}^d\), which can be seen as a subset of \(\mathbb {T}_L^3\). In Example 4.5, we explained how to build a process on \(\mathbb {T}_L^3\) out of \(\Lambda _0\), with \(\Lambda (\omega ) = \Lambda _0 + \omega \), \(\omega \in \mathbb {T}_L^3\). By a simple translation, the results above, that are valid for \(\Lambda _0 + \omega \) for almost everywhere \(\omega \), are still valid for \(\omega =0\). Thus, for \(\Lambda = \Lambda _0\), we deduce from Proposition 4.7 the existence of an \(L\mathbb {Z}^3\)-periodic solution \(\mathbf{H^\eta }\) of (4.5) with \({\nabla }\mathbf{H^\eta } \in L^2_{loc}\). If we further assume that \(\mathbf{H^\eta }\) is mean-free, it is clearly unique. Then, following Corollary 4.9 and Theorem 5.1, there exists an \(L\mathbb {Z}^3\)-periodic solution H of (4.3), such that
where \(H^\eta \) is associated to H by (4.4). We have used that in the periodic case, the intensity of the process is \(m=\frac{M}{L^3}\), while the expectation is simply the average over \(K_L\).
To make things more explicit, we introduce the periodic Green function \(G_{S,L} : \mathbb {R}^3 \rightarrow \mathbb {R}^3\), satisfying
The Green function \(G_{S,L}\) is easily expressed in Fourier series. If we write
a straightforward calculation shows that, for all \(k \in \mathbb {Z}^3_*\),
where \(\pi ^\perp _k\) denotes the projection orthogonally to the line \(\mathbb {R}k\). Note that the Fourier series for \(G_{S,L}\) converges, for instance, in the quadratic sense as follows:
Proposition 5.4
Proof
Clearly, the \(L\mathbb {Z}^3\)-periodic field defined on \(K_L\) by \(\tilde{H}(y) := \sum _{i=1}^M G_{S,L}(y+a_i)\) is a solution of (4.3), and by Proposition 4.3\({\nabla }\tilde{H}\) and \({\nabla }H\) differ from a constant matrix. As \({\nabla }(\tilde{H} - H) = {\nabla }(\tilde{H}^\eta - H^\eta )\) is the gradient of a periodic function, we have eventually \({\nabla }\tilde{H} = {\nabla }H\). Up to adding a constant field to H, we can assume that
Then, if \(\eta \) is small enough so that \(B(a_i, \eta ) \subset K_L\) for all i, \(H^\eta \) is the L-periodic field given on \(K_L\) by
We integrate by parts to find
where we have used that the last term of the second line vanishes identically. We then write \(G_{S,L} = G_S + \phi _{S,L}\) with \(\phi _{S,L}\) smooth near 0 to obtain
Combining this with Lemma 3.6 and (5.17), we get
We conclude by the last point of Lemma 3.5 that
\(\square \)
Proposition 5.5
(Simple cubic lattice). In the special case where \(L=M=1\), we find
with \(\alpha = \frac{5}{2} (1 - 60 a)\), \(\beta = \frac{5}{2} (1 + 40 a)\), and \(a \approx -0,04655\) is defined in (5.19).
Proof
When \(M=L=1\), the formula from the last proposition simplifies into \(\lim _N \mathcal {V}_N = \frac{25}{2} S{\nabla }\cdot \phi _{S,1}(0)\), with \(\phi _{S,1} = G_{S,1} - G_S\). The periodic Green function \(G_{S,1}\) was computed using the Fourier series in the last paragraph. We found
We use formulas from [20], (see also [42, Eqs. (64)–(65)]) to get
and
where \(c_1\) and \(c_2\) are constants, and
Note that the formula (5.19) defines implicitly a. A numerical computation was carried in [42], see also [34], giving \(a \approx -0,04655\).
Inserting in the expression for \(G_{S,1}\), we find, after a tedious calculation, that
Note that to carry out this calculation, we used the fact that S is trace-free, which leads to the identity
Moreover, we know from (3.12) that
We end up with
and the right formula for \(\lim _N \mathcal {V}_N\). \(\square \)
5.3 Formula in the Stationary Case with the 2-Point Correlation Function
We consider here the case of random point processes in \(\mathbb {R}^3\) (\(X=\mathbb {R}\)), such that (P1)–(P2)–(P3) hold. We further assume that the mean density is \(m=1\). We assume moreover that this point process admits a 2-point correlation function, that is a function \(\rho _2=\rho _2(x,y) \in L^1_{loc}(\mathbb {R}^3 \times \mathbb {R}^3)\) such that for all bounded sets K and all smooth F in a neighborhood of K,
As the process is stationary, one can write \(\rho _2(x,y) = \rho (x-y)\). Our goal is to prove the following formula:
Proposition 5.6
Almost surely,
where \(G_{S,L}\) refers to the \(L \mathbb {Z}^3\)-periodic Green function introduced in (5.18).
Remark 5.7
We remind the reader that the periodic Green function \(G_{S,L}\) has singularities at each point of \(L \mathbb {Z}^d\). But as the sum is restricted to points \(z,z'\) in \(\Lambda \cap K_{L-1}\), \(z-z'\) is always away from this set of singularities. In the same way, the integral over \(K_{L-1} \times K_{L-1}\) in the second equality is well-defined. Under further assumption on the two-point correlation function \(\rho \), one could make sense of the integral over \(K_L \times K_L\) and replace the former by the latter.
Proof
Let \(\eta \) small enough so that Proposition 4.4 holds. We have
Let \(H_L = \sum _{i=1}^M G_{S,L}(\cdot +a_i)\), where \(\{ a_1, \dots , a_M\} = \Lambda \cap K_{L-1}\). Note that \(H_L\) is associated to the point process \(\Lambda _L\) obtained by \(L \mathbb {Z}^d\)-periodization of \(\Lambda \cap K_{L-1}\). We shall prove below that
As \(\frac{M}{L^3} = \frac{|\Lambda \cap K_L|}{L^3} \rightarrow 1\) as \(L \rightarrow +\infty \), it follows from (5.20) that
where the last equality comes from Proposition 4.4. One can apply such proposition because the \(L\mathbb {Z}^d\)-periodized network \(\Lambda _L\) has a minimal distance between points that is independent of L. This is the reason why we used \(K_{L-1}\) instead of \(K_L\) in the definition of \(\Lambda _L\). Eventually, by Proposition 5.4,
Using that
we get that
We obtain
This is the first formula of the proposition. To prove the second one, one can go back to formula (5.21) and take the expectation of both sides. The left-hand side, which is deterministic, is of course unchanged. As regards the r.h.s., one can swap the limit in L and the expectation by invoking the dominated convergence theorem. Indeed, both terms \(\frac{1}{L^3} \int _{K_L} |{\nabla }H^\eta _L|^2\) and \(\frac{M}{(\eta L)^3} \Bigl ( \int _{B^1} |{\nabla }G_S^1|^2 + \frac{3}{10\pi } |S|^2 \Bigr )\) are bounded uniformly in n and in the random parameter \(\omega \) (but not uniformly on \(\eta \)): the first term is bounded through a simple energy estimate, while the second one is bounded thanks to the almost sure separation assumption.
The final step is to prove (5.20), almost surely. We set \({\varepsilon }:= \frac{1}{L}\), and introduce, for all \(x \in K_1\),
and similarly, for all \(x \in K_1\),
where \((H^\eta , P^\eta )\) refers to the field built in Proposition 4.7. Clearly,
while, by the ergodic theorem, one has, almost surely, that
It remains to show that
We notice that the difference \(h_{\varepsilon }= \bar{h}^\eta _{\varepsilon }- h^\eta _{{\varepsilon }}\) satisfies the Stokes equation
where
and where we recall that \(\Lambda _L\) is obtained by \(L\mathbb {Z}^3\)-periodization of \(\Lambda \cap K_{L-1}\). Testing against \({\varepsilon }^6 h_{\varepsilon }\), we find
where
with
Note that both \(F_{\varepsilon }\) and \(G_{\varepsilon }\) are divergence-free.
To handle the first term at the right-hand side of (5.23), we notice that
resulting in
As regards the second term, one proceeds exactly as in Paragraph 5.1, replacing \(\mathcal {O}\) by \(K_1\): see the treatment of \(F^2_{\varepsilon }\) and \(F^3_{\varepsilon }\), defined in (5.13) and (5.15). One gets in this way that for all divergence-free \(\varphi \in H^1(K_1)\),
As regards the last term, we take into account the periodicity of \(H^\eta _L\) and \(\tilde{G}\) to write
As \(\int _{{\partial }K_1} \bar{h}^\eta _{\varepsilon }\cdot n = 0\), we can introduce a solution \(\Phi _{\varepsilon }\) of
Proceeding as in Paragraph 5.1 (replacing \(\mathcal {O}\) by \(K_1\)), one can show that \(\Vert {\varepsilon }^3 \bar{h}^\eta _{\varepsilon }\Vert _{H^{1/2}({\partial }K_1)}\) goes to zero with \({\varepsilon }\), and so \(\Vert \Phi ^{\varepsilon }\Vert _{H^1(K_1)}\) goes to zero as well. Eventually, we write
Hence, we find
which concludes the proof. \(\square \)
References
Almog, Y., Brenner, H.: Global homogenization of a dilute suspension of spheres. arXiv:2003.01480
Ammari, H., Garapon, P., Kang, H., Lee, H.: Effective viscosity properties of dilute suspensions of arbitrarily shaped particles. Asymptot. Anal. 80(3–4), 189–211, 2012
Basson, A., Gérard-Varet, D.: Wall laws for fluid flows at a boundary with random roughness. Commun. Pure Appl. Math. 61(7), 941–987, 2008
Batchelor, G.: An Introduction to Fluid Dynamics. Cambridge University Press, Cambridge 2002
Batchelor, G., Green, J.: The determination of the bulk stress in a suspension of spherical particles at order \(c^2\). J. Fluid Mech. 56, 401–427, 1972
Batchelor, G., Green, J.: The hydrodynamic interaction of two small freely moving spheres in a linear flow field. J. Fluid Mech. 56, 375–400, 1972
Beliaev, A.Y., Kozlov, S.M.: Darcy equation for random porous media. Commun. Pure Appl. Math. 49(1), 1–34, 1996
Blaszczyszyn, B.: Lecture notes on random geometric models—random graphs, point processes and stochastic geometry. Preprint HAL cel-01654766
Borodin, A., Serfaty, S.: Renormalized energy concentration in random matrices. Commun. Math. Phys. 320(1), 199–244, 2013
Chemin, J.-Y.: Perfect Incompressible Fluids, volume 14 of Oxford Lecture Series in Mathematics and its Applications. The Clarendon Press, Oxford University Press, New York, 1998. Translated from the 1995 French original by Isabelle Gallagher and Dragos Iftimie
Clausius, R.: Die mechanische Behandlung der Elektricität. Vieweg, Braunshweig 1879
Daley, D.J., Vere-Jones, D.: An Introduction to the Theory of Point Orocesses. Vol. II. Probability and Its Applications (New York). Springer, New York, second edition, 2008. General theory and structure
Desvillettes, L., Golse, F., Ricci, V.: The mean-field limit for solid particles in a Navier–Stokes flow. J. Stat. Phys. 131(5), 941–967, 2008
Duerinckx, M., Gloria, A.: Analyticity of homogenized coefficients under Bernoulli perturbations and the Clausius–Mossotti formulas. Arch. Ration. Mech. Anal. 220(1), 297–361, 2016
Einstein, A.: Eine neue Bestimmung der Moleküldimensionen. Ann. Physik. 19, 289–306, 1906
Galdi, G.P.: An Introduction to the Mathematical Theory of the Navier–Stokes Equations. Vol. I, Volume 38 of Springer Tracts in Natural Philosophy. Springer-Verlag, New York, 1994. Linearized steady problems
Gamblin, P., Saint Raymond, X.: On three-dimensional vortex patches. Bull. Soc. Math. France 123(3), 375–424, 1995
Guazelli, E., Morris, J.: A Physical Introduction to Suspension Dynamics. Cambridge University Press, Cambridge 2011
Haines, B.M., Mazzucato, A.L.: A proof of Einstein’s effective viscosity for a dilute suspension of spheres. SIAM J. Math. Anal. 44(3), 2120–2145, 2012
Hasimoto, H.: On the periodic fundamental solutions of the stokes equations and their application to viscous flow past a cubic array of spheres. J. Fluid Mech. 5, 317–328, 1959
Hillairet, M., Wu, D.: Effective Viscosity of a Polydispersed Suspension (2019). arXiv:1905.12306
Hinch, E.: An averaged-equation approach to particle interactions in a fluid suspension. J. Fluid Mech. 83, 695–720, 1977
Höfer, R.M.: Sedimentation of inertialess particles in Stokes flows. Commun. Math. Phys. 360(1), 55–101, 2018
Höfer, R.M., Velázquez, J.J.L.: The method of reflections, homogenization and screening for Poisson and Stokes equations in perforated domains. Arch. Ration. Mech. Anal. 227(3), 1165–1221, 2018
Jabin, P.-E., Otto, F.: Identification of the dilute regime in particle sedimentation. Commun. Math. Phys. 250(2), 415–432, 2004
Jikov, V.V., Kozlov, S.M., Oleĭnik, O.A.: Homogenization of Differential Operators and Integral Functionals. Springer, Berlin 1994. Translated from the Russian by G. A. Yosifian
Keller, J., Rubenfeld, L.: Extremum principles for slow viscous flows with applications to suspensions. J. Fluid Mech. 30, 97–125, 1967
Lévy, T., Sánchez-Palencia, E.: Einstein-like approximation for homogenization with small concentration. II. Navier–Stokes equation. Nonlinear Anal. 9(11), 1255–1268, 1985
Maxwell, J.: A Treatise on Electricity and Magnetism, vol. 1. Clarendon Press, Oxford 1881
Mecherbet, A.: Sedimentation of particles in Stokes flow, 2018. arXiv:1806.07795
Métivier, G.: Intégrales singulières, cours DEA. https://www.math.u-bordeaux.fr/~gmetivie/ISf.pdf 1981 (revised 2005)
Mossotti, O.: Discussione analitica sul’influenza che l’azione di un mezzo dielettrico ha sulla distribuzione dell’elettricità alla superficie di più corpi elettrici disseminati in esso. Mem. Mat. Fis. della Soc. Ital. di Sci. in Modena 24, 49–74, 1850
Niethammer, B., Schubert, R.: A local version of Einstein’s formula for the effective viscosity of suspensions. arXiv:1903.08554
Nunan, K., Keller, J.: Effective viscosity of a periodic suspension. J. Fluid Mech. 142, 269–287, 1984
O’brien, R.: A method for the calculation of the effective transport properties of suspensions of interacting particles. J. Fluid Mech. 91(1), 17–39, 1979
Rougerie, N., Serfaty, S.: Higher-dimensional Coulomb gases and renormalized energy functionals. Commun. Pure Appl. Math. 69(3), 519–605, 2016
Saito, N.: Concentration dependence of the viscosity of high polymer solutions. i. J. Phys. Soc. Jpn. 5(1), 4–8, 1950
Sánchez-Palencia, E.: Einstein-like approximation for homogenization with small concentration. I. Elliptic problems. Nonlinear Anal. 9(11), 1243–1254, 1985
Sandier, E., Serfaty, S.: From the Ginzburg–Landau model to vortex lattice problems. Commun. Math. Phys. 313(3), 635–743, 2012
Sandier, E., Serfaty, S.: 2D Coulomb gases and the renormalized energy. Ann. Probab. 43(4), 2026–2083, 2015
Serfaty, S.: Coulomb Gases and Ginzburg–Landau Vortices. Zurich Lectures in Advanced Mathematics. European Mathematical Society (EMS), Zürich 2015
Zuzovsky, M., Adler, P., Brenner, H.: Spatially periodic suspensions of convex particles in linear shear flows. iii. dilute arrays of spheres suspended in newtonian fluids. Phys. Fluids 26, 1714, 1983
Acknowledgements
We express our gratitude to Sylvia Serfaty for explaining to us her work on Coulomb gases and being a source of fruitful suggestions. We acknowledge the support of the SingFlows Project, Grant ANR-18-CE40-0027 of the French National Research Agency (ANR). D. G.-V. acknowledges the support of the Institut Universitaire de France. M.H. acknowledges the support of Labex Numev Convention Grants ANR-10-LABX-20.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by S. Serfaty
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Proof of Lemma 2.4
A Proof of Lemma 2.4
For any open set U, we denote \(\fint _U = \frac{1}{|U|} \int _U\). By (H2), we have
We write
with
Setting \(y_i = N^{-1/3} x_i\), using that for \(i \ne j\), \(|y_i - y_j| \geqq \frac{1}{2} (c + |y_i - y_j| ) \geqq c\),
From the inequality (2.35), applied with \(a_{ij} = \frac{1}{(c + |y_i - y_j|)^4}\) and \(b_j = A_j\), we deduce
Similarly,
This leads to
The last term is the most difficult. We follow [21]. Let us remind ourselves that
Let \(\chi _d(x) = \chi (x/d)\) a smooth function that is 0 in B(0, d), 1 outside B(0, 2d). Introducing the function \(F_A = \sum _{j} A_j 1_{B(x_j,d)}\), using that \(d \leqq \min _{i \ne j} \frac{|x_i - x_j|}{4}\), we can write that
where \(\mathbf {K}(x)\) is an endomorphism of the space of symmetric matrices, defined by
We then split \(A'_{i,3} = M_i + N_i\), with
By Hölder inequality,
and so
The kernel \(\chi _d \mathbf {K}\) enters the framework of the Calderón–Zygmund theorem, see for instance [31, Chapters 4 and 5]: for all \(1< q <+\infty \), the operator \(\big ( \chi _\mathrm{d}\mathbf {K}\bigr ) \, \star \) is continuous from \(L^q(\mathbb {R}^3)\) to \(L^q(\mathbb {R}^3)\), with
We stress that the constant \(C_q\) depends only on q, and not on d, as can be seen from the rescaling \(x' := x'/d\). It follows that
As the balls \(B(x_j,d)\) are disjoint, \( |\sum A_j 1_{B(x_j,d)}|^q = \sum |A_j|^q 1_{B(x_j,d)}\), so that \(\Vert F_A\Vert _{L^q(\mathbb {R}^3)}^q = \frac{4\pi }{3} \sum |A_j|^q d^3\), and
To bound \(N_i\), we notice that for all \(x \in B_i\), the support of \(x' \rightarrow \chi _d(x_i-x') - \chi _d(x-x')\) is included in
(remark that by definition of \(\phi \), a is less than d for \(\phi \) small enough). We get
so that
using that, for \(\phi \ll 1\), \(a \ll d\) and \(\big |\ln \big (\frac{2d+a}{d-a}\big )\big |\) is bounded by an absolute constant.
Rights and permissions
About this article

Cite this article
Gérard-Varet, D., Hillairet, M. Analysis of the Viscosity of Dilute Suspensions Beyond Einstein’s Formula. Arch Rational Mech Anal 238, 1349–1411 (2020). https://doi.org/10.1007/s00205-020-01567-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00205-020-01567-7