
Abstract
In this article we study the induced geodesic distance of fractional order Sobolev metrics on the groups of (volume preserving) diffeomorphisms and symplectomorphisms. The interest in these geometries is fueled by the observation that they allow for a geometric interpretation for prominent partial differential equations in the field of fluid dynamics. These include in particular the modified Constantin–Lax–Majda and surface quasi-geostrophic equations. The main result of this article shows that both of these equations stem from a Riemannian metric with vanishing geodesic distance.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It has been recently shown [57] that the surface quasi-geostrophic (SQG) equation
admits a geometric interpretation as the Euler–Arnold equation for geodesics of a right-invariant \(H^{-1/2}\) metric on the group of diffeomorphisms which preserve the volume form of a two-manifold. Recall that geodesics are critical points of the path length functional, and that the geodesic distance is the infimal length of paths between two given points. In the article [57] Washabaugh conjectured that the geodesic distance of the right-invariant \(H^{-1/2}\) metric on the group of volume preserving diffeomorphisms is degenerate, that is, there are distinct volume preserving diffeomorphisms whose geodesic distance is zero. The main result of this article gives an affirmative answer to this conjecture.
Main Theorem
Let M be a two-dimensional orientable manifold with Riemannian metric g and volume form \(\mu ={{\,\mathrm{vol}\,}}(g)\), and let \(\mathrm {Diff}_{\mu }(M)\) denote the group of all diffeomorphisms \(\varphi \) satisfying \(\varphi ^*\mu =\mu \). Then the geodesic distance of the right-invariant \(H^{-1/2}\) metric on \(\mathrm {Diff}_\mu (M)\) is degenerate.
This result is proven in Corollary 1 using the more general Theorem 3. We next discuss the relevance of this result in the broader context of the study of partial differential equations by geometric methods.
1.1 A Geometric View on Partial Differential Equations
Washabaugh’s work stands in the tradition of studying partial differential equations (PDEs) from a geometric perspective by representing them as related to geodesic equations under suitable metrics. Generally on a Lie group G with right-invariant metric, the geodesic equation splits into the decoupled pair of equations
here the first equation is the flow equation, while the second is called the Euler–Arnold equation. This program for PDEs was started by Arnold [1], who represented Euler’s equation of hydrodynamics as the Euler–Arnold equation of the right-invariant \(L^2\) metric on the group of volume preserving diffeomorphisms. Subsequently, similar representations were found for many other important PDEs in hydrodynamics and physics, including the modified Constantin–Lax–Majda equation [8, 14, 21, 59], the Camassa–Holm equation [10, 32, 43], the Korteweg–de Vries equation [30], and the Hunter–Saxton equation [24, 29, 37, 39] (see [28, 31, 56] for surveys and further examples). These representations allow one to study properties of the PDE in relation to properties of the underlying Riemannian manifold. For example, local well-posedness of the PDE, including continuous dependence on initial conditions, is closely related to smoothness of the geodesic spray [15]; see [44] for further results on smoothness for other Euler–Arnold equations. Further geometric properties which have been studied in this context are the sign of the sectional curvature [28], Fredholmness of the exponential map [44] and, as in this article, degeneracy of the geodesic distance functional [42].
1.2 Degeneracy of the Geodesic Distance on Diffeomorphism Groups
One of the best-known instances of this phenomenon was discovered by Eliashberg and Polterovich [18], who showed the degeneracy of the geodesic distance of the bi-invariant\(W^{-1,p}\) metric with \(p<\infty \) on the group of symplectomorphisms. This is in contrast to Hofer’s \(W^{-1,\infty }\) metric, which has non-degenerate geodesic distance [23]. More than 10 years later, Michor and Mumford [42] proved that the geodesic distance of the right-invariant\(L^{2}\) metric on the group of diffeomorphisms vanishes identically. Here the corresponding Euler–Arnold equation is the inviscid Burgers’ equation \(u_t+3uu_x=0\). Subsequently, Bauer et al. [3,4,5] extended this result to fractional order Sobolev metrics of order \(s< 1/2\) on general diffeomorphism groups and for \(s=\frac{1}{2}\) on the diffeomorphism group of the circle, and to the \(L^2\) metric on the Virasoro–Bott group, whose Euler–Arnold equation is the Korteweg–de Vries equation. While the reasons for this degeneracy are still mysterious, it has been conjectured by Michor and Mumford [42] that there exists a relation to locally unbounded curvature of the corresponding Riemannian metric.
In many cases the (non-)degeneracy of the geodesic distance goes hand in hand with Fredholmness of the exponential map and well-posedness properties of the geodesic equation and Euler–Arnold equation. Sobolev metrics on diffeomorphism groups depend on a smoothness parameter s, the number of derivatives of the vector field that appear in the metric at the identity, and the higher this parameter is, the better-behaved geodesics are. For right-invariant Sobolev metrics of fractional order on the diffeomorphism group of a one-dimensional manifold, we summarize the known geometric properties in Table 1 below: smoothness of the exponential map \(u_0\mapsto g(1)\), Fredholmness of this map, global existence of geodesics, and nonvanishing geodesic distance.
Clearly the case \(s=\tfrac{1}{2}\) is the transition for most of these properties, which suggests that there are some connections between them. Global existence is known only for orders \(s\in \{0,\frac{1}{2},1\}\), where it fails, and for orders \(s>\tfrac{3}{2}\), where global existence holds almost trivially because the Riemannian distance generates the manifold topology, and standard results of Riemannian geometry on Hilbert manifolds apply [35].
For diffeomorphism groups on higher dimensional manifolds the critical indices for Fredholmness and smoothness of the exponential map do not change, whereas the critical indices for vanishing geodesic distance and global existence depend on the dimension. Vanishing geodesic distance for \(\frac{1}{2}\leqq s<1\) is an extremely recent result by Jerrard and Maor [26], who disproved an earlier conjecture by Bauer et al. [4]. We again summarize the known geometric properties in Table 2:
For the volume-preserving diffeomorphism group of a simply-connected compact two-dimensional surface M, the critical exponents change again, as can be seen from Table 3 below. The geodesic distance was previously known to be nondegenerate for \(s=0\) (corresponding to ordinary two dimensional Euler) and degenerate for \(s=-1\). This paper completes the picture for \(s\le -\tfrac{1}{2}\). For the interval \(-\tfrac{1}{2}<s<0\), the answer is still unknown.
In higher dimensions the critical exponents changes again. In dimension 3 it becomes \(s=0\) for both Fredholmess and vanishing, corresponding to the usual three dimensional Euler equation. Here the exponential map is smooth [15] but not Fredholm [16], while global existence is notoriously unknown. The geodesic distance is positive, but not due to an intrinsic property of the metric: rather due to the fact that the right-invariant metric happens to be the restriction of the non-invariant metric, for which the geodesics are known explicitly and given by pointwise geodesics in the base manifold M [15]. The completion of the smooth volume-preserving diffeomorphisms in the Riemannian distance is the space of all measure-preserving maps, a result in dimension 3 and higher due to Shnirelman [51]. Intuitively we may think of the volume-preserving constraint as doing very little to enforce smoothness in dimension 3 or higher; on the other hand in two dimensions the completion is smaller (though it is not known exactly what it is). The fact that there are smooth volume-preserving diffeomorphisms in a three dimensional cube which cannot be joined by a minimizing geodesic, and that the diameter of this group is finite [50] is further evidence that for three dimensional fluids, the distance is “nearly” degenerate. From the tables above, we may suspect that these geometric properties are related to each other and to the global existence question, though as yet no direct implication is known.
1.3 Relation to Degeneracy of the Displacement Energy
This article simplifies and unifies the methods which were used by Michor et al. [3,4,5, 42] to prove degeneracy of the geodesic distance on diffeomorphism groups. One key insight is the observation that an argument of Eliashberg and Polterovich [18], which links degeneracy of the geodesic distance to degeneracy of the displacement energy, generalizes from bi-invariant to right-invariant metrics; see Theorem 1. This significantly widens the applicability of [18], as it allows us to study the large class of right-invariant Sobolev metrics on diffeomorphism groups. In the context of \(W^{-1,p}\)-norms on the contactomorphism group this has been observed by Shelukhin [48, Remark 7]. We present a formal proof of this result in the context of general groups of transformations.
These results circumvent the main difficulty in the proofs of vanishing geodesic distance of [3,4,5, 26, 42], namely, to construct short paths of diffeomorphisms with fixed end points. In contrast, there is no end point constraint in the definition of the displacement energy, other than that some fixed set of points has to be mapped to some disjoint location. This is much easier to handle.
1.4 Application to Sobolev Metrics on Diffeomorphism Groups
We show that the geodesic distance of the \(H^{1/2}\) metric on diffeomorphism groups vanishes identically; see Theorem 2. The corresponding Euler–Arnold equation is the Wunsch (modified Constantin–Lax–Majda) equation [8, 14, 21, 59]. Moreover, we show that the geodesic distance of the \(H^{-1/2}\) metric on groups of exact diffeomorphisms vanishes identically; see Theorem 3. This implies the degeneracy of the geodesic distance on groups of volume preserving diffeomorphisms on two-manifolds; see Corollary 1. The corresponding Euler–Arnold equation is the SQG equation. We conjecture that these results are sharp, referring to Section 5 for precise statements.
1.5 Structure of the Article
Section 2 contains the characterization of the degeneracy of the geodesic distance in terms of the displacement energy. Sections 3 and 4 contain applications of this theorem to groups of diffeomorphisms and volume preserving diffeomorphisms, respectively.
2 Right-Invariant Riemannian Metrics on Lie Groups
In this section we establish a necessary and sufficient condition for the (non-)degeneracy of the geodesic distance on infinite-dimensional groups with right-invariant weak Riemannian metrics. This setting is natural for the study of diffeomorphism groups and other infinite-dimensional topological groups; see the applications in Sections 3 and 4.
2.1 Geodesic Distance
Let G be a (possibly infinite dimensional) manifold and topological group with neutral element \(e\), Lie algebra \({\mathfrak {g}}=T_eG\), and left and right translations L and R given by
Assume for each \(g\in G\) that \(R_g:G\rightarrow G\) is smooth, and let \(\langle \!\langle \cdot ,\cdot \rangle \!\rangle \) be an inner product on the Lie algebra \({\mathfrak {g}}\). This gives rise to the following right-invariant Riemannian metric on G:
The corresponding geodesic distance function is defined as
where the infimum is taken over all smooth paths in G with \(g(0)=g_0\) and \(g(1)=g_1\). The geodesic distance function is called degenerate if \(d(g_1,g_2)=0\) for some \(g_1\ne g_2 \in G\), and it is called vanishing if \(d(g_1,g_2)=0\) for all \(g_1, g_2 \in G\).
2.2 Displacement Energy
Assume the setting of Section 2.1, and let G act effectively and continuously from the left on a set M. Then the displacement energy [18] of a subset \(A\subseteq M\) is defined as
the support of a transformation \(g \in G\) is defined as
and the group of transformations with support in \(A \subseteq M\) is denoted by [18]
A subset \(A\subseteq M\) is called essential if the corresponding group \(G_A\) is non-Abelian, and a transformation \(g \in G\) is called non-trivial if \(g\ne e\).
2.3 Relation Between Geodesic Distance and Displacement Energy
On finite-dimensional manifolds and, more generally, manifolds with strong Riemannian metrics, the geodesic distance is always non-degenerate [34]. For weak Riemannian metrics this is no longer true: there exist Riemannian metrics that induce vanishing geodesic distance [18, 42]. In this section we will describe an equivalence between this degeneracy of the geodesic distance and degeneracy of the displacement energy. This result is a generalization of a result by Eliashberg and Polterovich [18] for the group of symplectomorphisms with bi-invariant weak Riemannian metric.
The scarcity of bi-invariant metrics in the context of infinite dimensional Lie-groups limits the applicability of their result. Theorem 1 shows that left-invariance is not needed and can be replaced by condition (1), which holds automatically for all bi-invariant metrics (in this case, the constant \(|L_g|\) is equal to one). In the context of the contactomorphism group this result has been already observed by Shelukhin in [48]. In what follows we will formulate the result for a general group of transformations acting on a set M. The proof follows the sketch of Shelukhin, which is based on an adaption of the original argument by Eliashberg and Polterovich, see [18, 48].
Theorem 1
Assume the setting of Sections 2.1 and 2.2, and assume for each \(g \in G\) that left translation by g is Lipschitz continuous:
Furthermore assume that every non-empty, open subset \(A\subset M\) is essential.
Then the following three statements are equivalent:
- (a)
There exists a non-trivial transformation \(G\ni g \ne e\) with \(d(e,g)=0\).
- (b)
There exists a normal subgroup of transformations \(g \in G\) with \(d(e,g)=0\) which contains at least one non-trivial transformation \(g\ne e\).
- (c)
There exists an open set \(A\subseteq M\) with displacement energy \(E(A)=0\).
If G is a simple group then any of the above statements imply
- (d)
The geodesic distance function vanishes identically, that is, \(d(g_1,g_2)=0\) for all \(g_1,g_2\in G\).
Proof
For brevity, we write \(\left\| h\right\| _g=\sqrt{\langle \!\langle h,h\rangle \!\rangle _g}\) for all \(g \in G\) and \(h \in T_gG\). One easily verifies that the geodesic distance is symmetric and satisfies the triangle inequality, that is,
Moreover, the invariance properties of the metric imply that
(a) \(\implies \) (b): Let \(G^0\) be the set of all transformations \(g\in G\) with \(d(e,g)=0\). Then \(G^0\) is a subgroup of G because it holds for each \(g_1, g_2 \in G^0\) that
Moreover, \(G^0\) is a normal subgroup of G because it holds for all \(g_0 \in G^0\) and \(g \in G\) that
Thus, \(G_0\) is a normal subgroup of G, which contains a non-trivial transformation by (a), and we have shown (b).
(b) \(\implies \) (c): Let g be an non-trivial transformation in \(G^0\). As g is non-trivial, there exists an open set \(A\subseteq M\) such that \(g(A)\cap A=\emptyset \) (recall that we assumed the action of G to be continuous). Together with \(g\in G^0\) this implies \(E(A)=0\), which proves (c).
(c) \(\implies \) (a): This generalizes the proof for bi-invariant metrics in [18] and is similar to the proof described in [48]. The main ingredient is the following estimate for the distance of the commutator \([g_0,g_1]:=g_0^{-1}g_1^{-1}g_0g_1\) of \(g_0,g_1 \in G\) to the neutral element:
Note that (2) is trivially satisfied for bi-invariant metrics [18]. To prove (2) we calculate
and
Inequality (2) allows us to reuse the proof of [18] to show the degeneracy of the metric. Therefore let A be a non-empty, open set with zero displacement energy. As \(G_A\) is non-Abelian, we can choose \(g_0,g_1 \in G_A\) with \([g_0, g_1]\ne e\). For any \(g_2 \in G\) with \(g_2(A)\cap A=\emptyset \) we let \(g_3= g_0g_2^{-1}g_0^{-1}g_2=[g_0^{-1},g_2]\). Then it holds for all \(x \in M\) that
For \(x\in A\) this is obvious because \(g_3=g_0\) on A. For \(x\notin A\) and \(g_2(x)\notin A\) we have \(g_3(x)= x=g_0(x)\) and thus it is true as well. It remains to check the case \(x\notin A\) and \(g_2(x)\in A\). Then \(g_3(x)= g_2^{-1}g_0^{-1}g_2(x)\notin A\). Here we used that \(g_2^{-1}(A)\cap A=\emptyset \) and that \(g_0(x)=x\) on \(M{\setminus } A\). Thus, \(g_1g_3(x)= g_2^{-1}g_0^{-1}g_2(x)=g_3(x)\) and \(g_0^{-1}g_1g_0(x)=g_3^{-1}g_1g_3(x)=x\), which proves (3) for all \(x\in M\). As G acts effectively on M, it follows that \(g_0^{-1}g_1g_0=g_3^{-1}g_1g_3\). Therefore,
Taking the infimum over all \(g_2\) with \(g_2(A)\cap A=\emptyset \) yields
Thus, we have shown that \([g_1, g_0]\) is a non-trivial transformation with \(d(e,[g_1,g_0])=0\), which proves (a). This completes the proof of the equivalence of (a), (b), and (c).
(b) \(\implies \) (d): Note that \(G^{0}=G\) because the only non-trivial normal subgroup of a simple group is the group itself. Now the statement follows by the triangle inequality
\(\square \)
3 Diffeomorphism Groups and the Modified Constantin–Lax–Majda Equation
3.1 Sobolev Metrics on Diffeomorphism Groups
Let \((M,\langle \cdot ,\cdot \rangle )\) be a connected Riemannian manifold of bounded geometry.Footnote 1 For fixed \(s \in \mathbb {R}\), let \(\langle \!\langle \cdot ,\cdot \rangle \!\rangle \) be a Sobolev inner product of order s on the vector space \({\mathfrak {X}}(M)\) of compactly supported vector fields, and let \(\Vert \cdot \Vert \) be the corresponding norm. We omit the exact description here and refer the interested reader to the article [4] or the more extensive references [17, 53, 54]. For our purposes it suffices to say that a Sobolev \(H^s\)-norm on real-valued functions f on \(\mathbb {R}^n\) is given by
where \({\mathcal {F}}\) is the Fourier transform and \(a\in C^{\infty }(\mathbb {R}^n)\) is a Fourier multiplier, which satisfies for some constants \(C_1,C_2>0\) that
This definition extends to vector fields on general manifolds via charts and partitions of unity.
Let \(\mathrm {Diff}(M)\) be the connected component of the identity in the group of all smooth compactly supported diffeomorphisms of M. Then \(\mathrm {Diff}(M)\) is a convenient Lie group with Lie algebra \({\mathfrak {X}}(M)\) [33]. The right-invariant \(H^s\) metric on \(\mathrm {Diff}(M)\) is defined as
and the corresponding geodesic distance is defined as in Section 2.1.
3.2 Bump Functions with Small \(H^{\frac{1}{2}}\) Norm
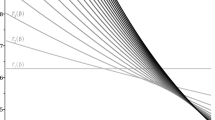
An essential ingredient in the proof of the degeneracy of the geodesic distance of the \(H^{\frac{1}{2}}\) metric on \(\mathrm {Diff}(M)\) (see Theorem 2) is the existence of bump functions with small \(H^{\frac{1}{2}}\) norm. In the following we will prove a slight refinement of [4, Lemma 3.3], which is used several times in the remainder of the article. The construction is illustrated in Fig. 1, and further details can be found in [55, Theorem 13.2].
Lemma 1
There exists a sequence \((\xi _n)_{n\in \mathbb N}\) in \( C^{\infty }(\mathbb {R},[0,1])\) such that
- (a)
\(\xi _n(x)=1\) for all \(x \in [-2^{-n},2^{-n}]\) and \(n\in \mathbb N\),
- (b)
\(\xi _n(x)=0\) for all \(x\notin [-1,1]\) and \(n\in \mathbb N\), and
- (c)
\(\sup _{n\in \mathbb N} n \Vert \xi _n\Vert ^2_{H^{1/2}(\mathbb {R})}<\infty \).

A sequence \((\xi _n)_{n\in \mathbb N}\) of bump functions with small \(H^{1/2}\) norm constructed as in the proof of Lemma 1
Proof
Let \(f:\mathbb {R}\rightarrow [0,1]\) be a smooth function with support in \([-1,1]\) such that \(f(x)=1\) for all \(x \in [-\frac{1}{2},\frac{1}{2}]\). For each \(n \in \mathbb N\) let \(\xi _n :\mathbb {R} \rightarrow [0,1]\) be given by
Then \(\xi _n\) obviously satisfies (a) and (b). By [4, Lemma 3.3] it follows that \((\xi _n)_{n\in \mathbb N}\) satisfies (c). \(\quad \square \)
3.3 Vanishing Geodesic Distance on Diffeomorphism Groups
Previous work by some of the authors [4, 5] shows that the geodesic distance vanishes for \(s<\frac{1}{2}\) on \(\mathrm {Diff}(M)\) and for \(s\leqq \frac{1}{2}\) on \(\mathrm {Diff}(S^1)\). In these articles it was conjectured that the result extends to \(s=\frac{1}{2}\) and general manifolds M. In the recent article [26] the vanishing geodesic distance result has been extended to metrics of order \(\frac{1}{2}<s<1\) for \(\mathrm{dim}(M)>1\). Thus only the case \(M=\mathbb {R}\) and \(s=\frac{1}{2}\) remained open for a complete characterization of vanishing (non-vanishing resp.) geodesic distance for Sobolev metrics on the group of diffeomorphisms of a general manifold M. This gap is closed by the following theorem. The construction is illustrated in Fig. 2.
Theorem 2
Assume the setting of Section 3.1. Then the right-invariant \(H^s\) metric on \(\mathrm {Diff}(M)\) has vanishing geodesic distance if and only if \(s\leqq \frac{\mathrm{dim}(M)}{2}\) and \(s<1\), that is, in dimension 1 if and only if \(s \leqq \frac{1}{2}\), and in dimension \(\geqq 2\) if and only if \(s<1\).
Remark 1
Different choices of Fourier multipliers, charts, and partitions of unity yield different but equivalent inner products and do not affect the degeneracy or non-degeneracy of the geodesic distance.

Illustration of the proof of Theorem 2: a sequence of diffeomorphisms with small \(H^{1/2}\) distance to the identity; each diffeomorphism maps the set \(A=(0,1)\) to some disjoint set \(A'\) above the line \(\{y=1\}\)
Proof of Theorem 2
It suffices to show the theorem for \(s=\frac{1}{2}\) and \(M=\mathbb {R}\). All other cases follow from [4, 5, 26]. The proof is divided in three steps. For brevity, we write \(\left\| h\right\| _\varphi =\sqrt{\langle \!\langle h,h\rangle \!\rangle _\varphi }\) for all \(\varphi \in \mathrm {Diff}(M)\) and \(h \in T_\varphi \mathrm {Diff}(M)\).
Step 1 We claim that the manifold \(M=\mathbb {R}\) contains a non-empty open set A which has vanishing displacement energy with respect to the action of \(\mathrm {Diff}(M)\). We will prove this claim for the set \(A=(0,1)\). We start from the observation that the constant vector field \(u=1\) has right translations \(\mathrm{Fl}_t^{u}(x)=x+t\) as flow, and that the set A does not intersect its right-translation \(\mathrm{Fl}_t^{u}(A)\) at time \(t=1\). To make the energy of the time dependent vector field arbitrarily small we choose a family \((\xi _n)_{n\in \mathbb N}\) of bump functions with properties (a)–(c) of Lemma 1 and define for each \(n\in \mathbb N\) the compactly supported time-dependent vector field
The idea behind this definition is to localize the vector field u without affecting the trajectory of the point zero; see Fig. 1. Indeed, the trajectory of zero is given by \(\mathrm{Fl}^{u}_t(0)=\mathrm{Fl}^{u_n}_t(0)\) because \(\xi _n(0)=1\). Note that the localization also corrects for the fact that right translations are not compactly supported. Let \(\varphi _n=\mathrm{Fl}^{u_n}_1 \in \mathrm {Diff}(\mathbb {R})\). As \(\varphi _n\) preserves monotonicity, one has
which proves that \(\varphi _n(A)\cap A=\emptyset \). Moreover, the \(H^{1/2}\)-distance between the identity and \(\varphi _n\) tends to zero as n tends to infinity:
Thus, A is an open set with vanishing displacement energy as claimed.
Step 2 Left multiplication \(L_\varphi :\mathrm {Diff}(\mathbb {R})\rightarrow \mathrm {Diff}(\mathbb {R})\) is smooth for each \(\varphi \in \mathrm {Diff}(\mathbb {R})\). Moreover, there is \(C_\varphi >0\) such that for each vector field \(X \in {\mathfrak {X}}(M)\),
by the continuity of reparametrizations \(H^{1/2}(\mathbb {R}) \ni X \mapsto R_{\varphi ^{-1}}X\in H^{1/2}(\mathbb {R})\) [25, Lemma B.3] and the continuity of pointwise multiplications \(H^{1/2}(\mathbb {R})\ni X \mapsto d\varphi . X \in H^{1/2}(\mathbb {R})\) [54, Corollary in Section 4.2.2]. If \(\psi :[0,1] \rightarrow \mathrm {Diff}(\mathbb {R})\) is a smooth path and \(X(t)=\partial _t\psi (t)\circ \psi (t)^{-1}\), this implies
Taking the infimum over all paths \(\psi \) with fixed end points shows (1). Finally we note that for each non-empty set the group \(\mathrm {Diff}(A)\) is non-Abelian, c.f. [18]. Thus, the conditions of Theorem 1 are satisfied for the group \(\mathrm {Diff}(\mathbb {R})\) with the right-invariant \(H^s\) metric \(\langle \!\langle \cdot ,\cdot \rangle \!\rangle \). Moreover, \(\mathrm {Diff}(\mathbb {R})\) is simple by [2, Theorem 2.1.1]. Thus, Theorem 1 together with the result of Step 2 show that the geodesic distance vanishes identically on \(\mathrm {Diff}(\mathbb {R})\). \(\quad \square \)
4 Groups of Volume Preserving Diffeomorphisms and the SQG Equation
Recall that the SQG equation is the Euler–Arnold equation of the right invariant \(H^{-1/2}\) metric on the group of diffeomorphisms which preserve the volume (or equivalently symplectic) form of a two-manifold [57]. We prove in this section that the geodesic distance associated to this metric vanishes. More generally, we show that this result extends to groups of exact diffeomorphisms on higher-dimensional manifolds.
4.1 Sobolev Metrics on Groups of Exact Diffeomorphisms
Let M be a be a connected finite-dimensional manifold endowed with a Riemannian metric \(\langle \cdot ,\cdot \rangle \) of bounded geometry and a symplectic form \(\omega \). The symplectic gradient of a function \(f \in C^\infty (M)\) is denoted by \(\nabla ^\omega f={\check{\omega }}^{-1}df \in {\mathfrak {X}}(M)\), where \({\check{\omega }}:TM\rightarrow T^*M\) is the symplectic isomorphism. A vector field is called exact if it is the symplectic gradient of a compactly supported function, and a diffeomorphism is called exact if it is generated by a time-dependent symplectic vector field, that is,
Alternative common names are globally Hamiltonian vector fields and Hamiltonian diffeomorphisms. Assume that \(\mathrm {Diff}_{\mathrm{ex}}(M)\) is a convenient Lie group with Lie algebra \({\mathfrak {X}}_{\mathrm{ex}}(M)\). This assumption is satisfied if M is compact [47] or, more generally, if M is connected and separable and the vector space of exact compactly supported 1-forms is a direct summand in the space of all closed compactly supported 1-forms [33, Sect. 43.13]. Then the \(H^s\) metric on \(\mathrm {Diff}_{\mathrm{ex}}(M)\) is defined as the unique right-invariant Riemannian metric \(\langle \!\langle \cdot ,\cdot \rangle \!\rangle \) which satisfies
Here \(\Vert \cdot \Vert _{\dot{H}^{s+1}(M)}\) denotes the homogeneous Sobolev (pseudo) norm of order \(s+1\). For \(s=-1\) this yields the bi-invariant metric as studied by Eliashberg and Polterovich [18]. The corresponding geodesic distance is defined as in Section 2.1. Note that \(\mathrm {Diff}_{\mathrm{ex}}(M)\) is a subgroup of the group \(\mathrm {Diff}_\omega (M):=\{\varphi \in \mathrm {Diff}(M): \varphi ^*\omega =\omega \}\) of symplectic diffeomorphisms.
4.2 Vanishing Geodesic Distance on Exact Diffeomorphisms
The geodesic distance of the \(H^s\) metric on \(\mathrm {Diff}_{\mathrm{ex}}(M)\) is known to be non-degenerate for \(s\geqq 0\) by [42] and degenerate for \(s=-1\) by [18]. The following theorem shows degeneracy for \(s\leqq -\frac{1}{2}\).
Theorem 3
Assume the setting of Section 4.1 with \(s\leqq -1/2\). Then the geodesic distance of the right-invariant \(H^{s}\) metric vanishes identically on the commutator sub-group \([\mathrm {Diff}_{\mathrm{ex}}(M),\mathrm {Diff}_{\mathrm{ex}}(M)]\) and, if M is compact, on \(\mathrm {Diff}_{\mathrm{ex}}(M)\).
Proof
Step 1 We claim that the manifold \(M=\mathbb {R}^2\) with the canonical symplectic form \(\omega =dx\wedge dy\) contains a non-empty open subset A with vanishing displacement energy. To prove this claim we consider a bump function \(\psi \in C^\infty (\mathbb {R},[0,1])\) satisfying for each \(x \in \mathbb {R}\) that
and define the Hamiltonian function
Then the symplectic gradient and gradient flow of f are given by
Note that \(\mathrm{Fl}_1^u\) is an exact diffeomorphism which maps the set \(A=(-1,1)\times (0,1)\) to the disjoint set \(\mathrm{Fl}_1^u(A)=(-1,1)\times (1,2)\); c.f. Fig. 3.
We will now shorten the \(H^{1/2}\) length of the flow of u by modifying u suitably. Let \((\xi _n)_{n\in \mathbb N}\) be a sequence of smooth bump functions with properties (a)–(c) of Lemma 1, and let g(t, x) describe the vertical position of the point (x, 0) under the flow of u at time t, that is,
Then we define for each \(n\in \mathbb N\) a time-dependent Hamiltonian function \(f_n\) and vector field \(u_n\) by
where \(\nabla ^\omega =(\partial _y,-\partial _x)\) acts only in the spatial dimensions. As \(u_n\) coincides with u along \(y=g(t,x)\), the corresponding flow satisfies
Thus, as illustrated in Fig. 3, the line \(\{(x,g(1,x)): x\in \mathbb {R}\}\) lies above the set A and below the set \(\mathrm{Fl}^{u_n}_1(A)\). It follows that \(\mathrm{Fl}^{u_n}_1(A)\cap A=\emptyset \). The \(H^{-1/2}\) length of the flow of \(u_n\) can be estimated using \(f_n(t,x,y)=(f\otimes \xi _n)\circ \mathrm{Fl}^{-u}_t(x,y)\) as
where the inequality follows from the continuity of compositions by diffeomorphisms [25, Lemma 2.7] and the last equality from the Hilbert tensor product representation \(H^{1/2}(\mathbb {R}^2)=H^{1/2}(\mathbb {R}){\hat{\otimes }} H^{1/2}(\mathbb {R})\) [52, Theorem 2.1]. Thus, the \(H^{-1/2}\) distance \(d(\mathrm {id},\mathrm{Fl}^{u_n}_1)\) tends to zero as \(n\rightarrow \infty \), which shows that the displacement energy of A vanishes.

Illustration of the proof of Theorem 2. The exact diffeomorphism \(\mathrm{Fl}^u_1\) maps the set A to \(A'\) and the line \(\{y=0\}\) to \(\{y=g(1,x)\}\). The exact diffeomorphisms \(\mathrm{Fl}^{u_n}_1\) also map the set A to some set above the line \(\{y=g(1,x)\}\) and additionally have short \(H^{1/2}\) distance to the identity
Step 2 We claim that every symplectic manifold M contains a non-empty open subset with vanishing displacement energy. To prove the claim, note that any Darboux coordinate system defines a symplectomorphism between an open subset U of M and an open subset V of \(\mathbb {R}^{2d}\), where \(\mathbb {R}^{2d}\) carries the canonical symplectic form \(\sum _{i=1}^d dx_{2i-1}\wedge dx_{2i}\). Without loss of generality V is a box \((-2r,2r)^{2d}\) for some \(r>0\). Let the bump function \(\psi \) and the Hamiltonian functions \(f_n\) be defined as in Step 1, choose \(\varepsilon >0\) such that the Hamiltonian functions \((x_1,x_2) \mapsto f_n(t,x_1/\varepsilon ,x_2/\varepsilon )\) are supported in \((-r,r)^2\), and define the localized Hamiltonian function
Note that \(g_n\) is supported in V and equals \(f_n(t,x_1/\varepsilon ,x_2/\varepsilon )\) on V / 2. If one sets
then it follows from Step 1 that the flow of the symplectic gradient \(v_n(t,x)=\nabla ^\omega g_n(t,x)\) satisfies \(\mathrm{Fl}^{v_n}_1(B) \cap B=\emptyset \). Moreover, the \(H^{-1/2}\) length of the flow of \(v_n\) can be estimated as follows: by the Hilbert tensor product representation \(H^{1/2}(\mathbb {R}^{2d})=H^{1/2}(\mathbb {R}){\hat{\otimes }}\cdots {\hat{\otimes }} H^{1/2}(\mathbb {R})\) [52, Theorem 2.1],
where the right-hand side tends to zero as \(n \rightarrow \infty \) by Step 1. Transferring this result from \(V\subseteq \mathbb {R}^{2d}\) back to \(U\subseteq M\) using the Darboux coordinates proves the claim.
Step 3 The assumptions of Theorem 1 are satisfied for the group \(\mathrm {Diff}_{\mathrm{ex}}(M)\) with the right-invariant \(H^s\) metric \(\langle \!\langle \cdot ,\cdot \rangle \!\rangle \). This can be verified as in the proof of Theorem 2. As any non-empty open set is essential for the action of \(\mathrm {Diff}_{\mathrm{ex}}(M)\) [2, Lemma 2.1.12 and Theorem 2.3.1], the implication (c) \(\Rightarrow \) (a) of Theorem 1 shows the existence of a non-trivial \(\varphi \in \mathrm {Diff}_{\mathrm{ex}}(M)\) with vanishing distance to the identity. The proof of Theorem 1 actually reveals the stronger statement that \(\varphi \) belongs to the commutator subgroup \([\mathrm {Diff}_{\mathrm{ex}}(M),\mathrm {Diff}_{\mathrm{ex}}(M)]\). For compact M the group \(\mathrm {Diff}_{\mathrm{ex}}(M)\) is simple [2, Theorem 4.3.1 and Remark 4.2.3], and for non-compact M the commutator subgroup \([\mathrm {Diff}_{\mathrm{ex}}(M),\mathrm {Diff}_{\mathrm{ex}}(M)]\) is simple [2, Theorem 4.3.3]. Thus, the geodesic distance vanishes identically on these respective groups by Theorem 1.(d). \(\quad \square \)
4.3 Degenerate Geodesic Distance on Volume Preserving Diffeomorphisms
On two dimensional manifolds, volume forms coincide with symplectic forms. This allows one to apply Theorem 2 to groups of volume preserving diffeomorphisms, which are of particular interest because several prominent PDEs are Euler–Arnold (that is, geodesic) equations of Sobolev \(H^s\) metrics thereon: for \(s=0\) one obtains Euler’s equation for the motion of an ideal fluid [1], and for \(s=-\frac{1}{2}\) one obtains the SQG-equation [57]. The following corollary to Theorem 2 states that the SQG equation corresponds to a degenerate Riemannian metric (note that this is in stark contrast to Euler’s equation, which corresponds to a non-degenerate metric):
Corollary 1
Let (M, g) be a two-dimensional orientable Riemannian manifold, and let \(\mu ={{\,\mathrm{vol}\,}}(g)\) be the Riemannian volume form. Then the geodesic distance of the right-invariant \(H^{-1/2}\) metric on the group \(\mathrm {Diff}_\mu (M):=\{\varphi \in \mathrm {Diff}(M):\varphi ^*\mu =\mu \}\) of volume preserving diffeomorphisms is degenerate.
Proof
As M is two-dimensional, the volume form \(\mu \) is also a symplectic form. Step 2 in the proof of Theorem 3 shows that M contains an open set A with vanishing displacement energy with respect to the action of \(\mathrm {Diff}_{\mathrm{ex}}(M)\). Note that the assumption that \(\mathrm {Diff}_{\mathrm{ex}}(M)\) is a convenient Lie group is not needed here. The set A has vanishing displacement energy also with respect to the action of \(\mathrm {Diff}_\mu (M)\) because \(\mathrm {Diff}_{\mathrm{ex}}(M)\) is contained in \(\mathrm {Diff}_\mu (M)\) and because \(\Vert \nabla ^\omega f\Vert _{H^{-1/2}(\mathbb {R}^2)}=\Vert f\Vert _{H^{1/2}}\) for each \(f \in C^\infty _c(M)\). Thus, the geodesic distance on \(\mathrm {Diff}_\mu (M)\) is degenerate by the implication (c) \(\Rightarrow \) (a) of Theorem 1 applied to \(G=\mathrm {Diff}_\mu (M)\). \(\quad \square \)
5 Open Problems and Conjectures
5.1 Degeneracy of the Geodesic Distance on Diffeomorphism Groups
The present article and the recent article [26] by Jerrard and Maor give a complete characterization of the geodesic distance of right invariant \(H^s\) metrics on diffeomorphism groups (see Theorem 2). Jerrard and Maor consider not only metrics of type \(H^s=W^{s,2}\), but also of type \(W^{s,p}\) for general \(p \in [1,\infty )\). In [26] they obtained a nearly complete characterization for this class of metrics; only the behavior at the critical Sobolev index \(s=\frac{\dim {M}}{p}\) remained open. One of the main difficulties in their analysis was to control the end points of certain paths in \(\mathrm {Diff}(M)\) with arbitrarily short length. Such precise control of the end points is not needed if Theorem 1 is invoked. This simplification was used in their follow-up article [27] to complete the characterization of vanishing (non-vanishing, resp.) geodesic distance.
For symplectomorphism groups much less is known. The results of this article show that the geodesic distance of \(H^s\) metrics is degenerate for \(s\leqq -\frac{1}{2}\) by Theorem 3 and non-degenerate for \(s\geqq 0\) by [42, Theorem 5.7], but the case \(-\frac{1}{2}< s< 0\) remains open. Sobolev metrics of type \(W^{s,p}\) have been studied only for \(s=-1\), and there the geodesic distance vanishes if and only if \(p<\infty \). The case \(s=-1\) and \(p=\infty \) corresponds to the Hofer metric, which is known to have non-vanishing geodesic distance [23]. An interesting question is whether or not the critical index is independent of the dimension of M. This is certainly compatible with existing results, and might be due to the higher rigidity of the group of symplectomorphisms. This would suggest that the geodesic distance of the right invariant \(W^{s,p}\) metric with \(p\in [1,\infty )\) is degenerate if and only if \(s\leqq \frac{1}{p}-1\).
5.2 Relation to Fredholmness of the Exponential Map
By the monotonicity of the \(H^s\) distance in s, there is a critical threshold \(s^*_{\text {dist}}\) such that the \(H^s\) geodesic distance is degenerate below and non-degenerate above the threshold:
Similarly, smoothness of geodesic spray depends monotonically on s [7, 20]. Thus, there is a again a critical index
where \(\exp \) denotes the Riemannian exponential map of the \(H^s\)-metric. Moreover, the Fredholm property of the exponential map is monotonic in s, since Fredholmness is generally obtained by compactness of the operator \(v\mapsto {{\,\mathrm{ad}\,}}_v^{\star }u_0\) describing the Euler–Arnold equation on diffeomorphism groups. Compactness of any such operator implies compactness of all operators of higher order [44]. Thus, there is again a critical threshold \(s^*_{\text {Fred}}\) for Fredholmness,
We conjecture that these thresholds are connected to each other as follows:
Conjecture 1
On any group of diffeomorphisms the critical thresholds satisfy the relation
This conjecture holds true in all known cases, including groups of diffeomorphisms, volume preserving diffeomorphisms and symplectomorphisms. It is, however, important to note that the behavior at the critical index may vary from property to property. For example, for one dimensional diffeomorphisms at \(s=\frac{1}{2}\), Fredholmness is false, whereas smoothness of the exponential map is true [8]. Similar statements apply to three dimensional fluids at \(s=0\) [44].
If Conjecture 1 is true, then the Fredhomness results of [44] would imply the following complete characterization for volume preserving diffeomorphisms on manifolds of dimension \(\geqq 3\):
Conjecture 2
The geodesic distance of the right invariant \(H^s\) metric on \(\mathrm {Diff}_\mu (M)\) in dimension \(\geqq 3\) vanishes if and only if \(s<0\).
5.3 Relations to Longtime Existence of Solutions to the Geodesic Equation
Properties of the Riemannian distance seem associated to global existence phenomena of the corresponding geodesic and Euler–Arnold equations. In finite dimensions this is expected; the Hopf–Rinow theorem says that geodesics extend for all time if and only if the Riemannian distance function gives a complete metric space. In infinite dimensions this is much less well-understood, and so far there exist no formal results in this direction. We see however several aspects of “borderline” behavior depending on the smoothness parameter s: the transition between global conservative (weak) solutions and nonunique shock solutions; between having a nonsmooth exponential map and having a smooth one; and between vanishing geodesic distance and positive geodesic distance. Many of these transitions seem to happen at the same value of s, based on the limited information we still have about the complete picture.
For example, in one space dimension, the Euler–Arnold equations include the Hunter–Saxton and Camassa–Holm equations at \(s=1\), the Wunsch or modified Constantin–Lax–Majda equation at \(s=\frac{1}{2}\), and the inviscid Burgers’ equation at \(s=0\) (see Table 1 for an overview and references). All of these have solutions that blow up in finite time. In the case \(s=1\), solutions of the Hunter–Saxton [6, 38] and Camassa–Holm [36, 41] equations may be continued using a geometric transformation in the space of smooth maps. Moreover, the exponential map is smooth, and the Riemannian distance is positive. On the other hand, in the case \(s=0\), solutions of the inviscid Burgers’ equation exhibit genuine shocks and their flows must lose continuity (and in particular smoothness) as well as dissipating energy; in addition the exponential map is non-smooth and the Riemannian distance vanishes. In between lies the Wunsch equation at \(s=1/2\). Here the exponential map is smooth, the Riemannian distance vanishes, and all geodesics end in finite time. It is not known whether geodesics can be continued in a slightly larger space of smooth or continuous nondecreasing functions, or whether they must leave the space of continuous functions entirely.
In future work we aim for a better understanding of the blowup properties of the borderline case aim to and connect that understanding to the results of this article.
References
Arnold, V.I.: Sur la géométrie différentielle des groupes de Lie de dimension infinie et ses applications à l’hydrodynamique des fluides parfaits. Ann. Inst. Fourier (Grenoble)16(fasc.1), 319–361, 1966
Banyaga, A.: The Structure of Classical Diffeomorphism Groups, Mathematics and its Applications, vol. 400. Kluwer Academic Publishers Group, Dordrecht 1997
Bauer, M., Bruveris, M., Harms, P., Michor, P.W.: Vanishing geodesic distance for the Riemannian metric with geodesic equation the KdV-equation. Ann. Glob. Anal. Geom. 41(4), 461–472, 2012
Bauer, M., Bruveris, M., Harms, P., Michor, P.W.: Geodesic distance for right invariant Sobolev metrics of fractional order on the diffeomorphism group. Ann. Glob. Anal. Geom. 44(1), 5–21, 2013
Bauer, M., Bruveris, M., Michor, P.W.: Geodesic distance for right invariant Sobolev metrics of fractional order on the diffeomorphism group. II. Ann. Glob. Anal. Geom. 44(4), 361–368, 2013
Bauer, M., Bruveris, M., Michor, P.W.: Homogeneous Sobolev metric of order one on diffeomorphism groups on real line. J. Nonlinear Sci. 24(5), 769–808, 2014
Bauer, M., Escher, J., Kolev, B.: Local and global well-posedness of the fractional order EPDiff equation. J. Differ. Equ. 258(6), 2010–2053, 2015
Bauer, M., Kolev, B., Preston, S.C.: Geometric investigations of a vorticity model equation. J. Differ. Equ. 260(1), 478–516, 2016
Bruveris, M., Vialard, F.-X.: On completeness of groups of diffeomorphisms. J. Eur. Math. Soc. (JEMS)19(5), 1507–1544, 2017
Camassa, R., Holm, D.D.: An integrable shallow water equation with peaked solitons. Phys. Rev. Lett. 71(11), 1661–1664, 1993
Castro, A., Córdoba, D.: Infinite energy solutions of the surface quasi-geostrophic equation. Adv. Math. 225(4), 1820–1829, 2010
Constantin, A., Escher, J.: Wave breaking for nonlinear nonlocal shallow water equations. Acta Math. 181(2), 229–243, 1998
Constantin, A., Kolev, B.: On the geometric approach to the motion of inertial mechanical systems. J. Phys. A35(32), R51–R79, 2002
Constantin, P., Lax, P.D., Majda, A.: A simple one-dimensional model for the three-dimensional vorticity equation. Commun. Pure Appl. Math. 38(6), 715–724, 1985
Ebin, D.G., Marsden, J.E.: Groups of diffeomorphisms and the motion of an incompressible fluid. Ann. Math. 2(92), 102–163, 1970
Ebin, D.G., Misiołek, G., Preston, S.C.: Singularities of the exponential map on the volume-preserving diffeomorphism group. Geom. Funct. Anal. 16(4), 850–868, 2006
Eichhorn, J.: Global Analysis on Open Manifolds. Nova Science Publishers Inc., New York 2007
Eliashberg, Y., Polterovich, L.: Bi-invariant metrics on the group of Hamiltonian diffeomorphisms. Int. J. Math. 4(5), 727–738, 1993
Escher, J., Kolev, B.: Geodesic completeness for Sobolev \(H^s\)-metrics on the diffeomorphism group of the circle. J. Evol. Equ. 14(4–5), 949–968, 2014
Escher, J., Kolev, B.: Right-invariant Sobolev metrics of fractional order on the diffeomorphism group of the circle. J. Geom. Mech. 6(3), 335–372, 2014
Escher, J., Kolev, B., Wunsch, M.: The geometry of a vorticity model equation. Commun. Pure Appl. Anal. 11(4), 1407–1419, 2012
Greene, R.E.: Complete metrics of bounded curvature on noncompact manifolds. Arch. Math. 31(1), 89–95, 1978
Hofer, H.: On the topological properties of symplectic maps. Proc. R. Soc. Edinb. Sect. A Math. 115(1–2), 25–38, 1990
Hunter, J.K., Saxton, R.: Dynamics of director fields. SIAM J. Appl. Math. 51(6), 1498–1521, 1991
Inci, H., Kappeler, T., Topalov, P.: On the regularity of the composition of diffeomorphisms. Mem. Am. Math. Soc. 226(1062), vi+60, 2013
Jerrard, R.L., Maor, C.: Vanishing geodesic distance for right-invariant Sobolev metrics on diffeomorphism groups. Ann. Glob. Anal. Geom. 56(2), 351–360, 2019
Jerrard, R.L., Maor, C.: Geodesic distance for right-invariant metrics on diffeomorphism groups—critical Sobolev exponents. Ann. Glob. Anal. Geom. 55(4), 631–656, 2019
Khesin, B., Lenells, J., Misiołek, G., Preston, S.C.: Curvatures of Sobolev metrics on diffeomorphism groups. Pure Appl. Math. Q. 9(2), 291–332, 2013
Khesin, B., Misiołek, G.: Euler equations on homogeneous spaces and Virasoro orbits. Adv. Math. 176(1), 116–144, 2003
Khesin, B., Ovsienko, V.: The super Korteweg–de Vries equation as an Euler equation. Funktsional. Anal. i Prilozhen. 21(4), 81–82, 1987
Kolev, B.: Local well-posedness of the EPDiff equation: a survey. J. Geom. Mech. 9(2), 167–189, 2017
Kouranbaeva, S.: The Camassa–Holm equation as a geodesic flow on the diffeomorphism group. J. Math. Phys. 40(2), 857–868, 1999
Kriegl, A., Michor, P.W.: The Convenient Setting of Global Analysis, Mathematical Surveys and Monographs, vol. 53. American Mathematical Society, Providence 1997
Lang, S.: Real and Functional Analysis, Graduate Texts in Mathematics, vol. 142. Springer, New York 1993
Lang, S.: Fundamentals of Differential Geometry, Graduate Texts in Mathematics, vol. 191. Springer, New York 1999
Lee, J.M.: Geometric approach on the global conservative solutions of the Camassa–Holm equation. J. Geom. Phys. 142, 137–150, 2019
Lenells, J.: The Hunter–Saxton equation describes the geodesic flow on a sphere. J. Geom. Phys. 57(10), 2049–2064, 2007
Lenells, J.: Weak geodesic flow and global solutions of the Hunter–Saxton equation. Discrete Contin. Dyn. Syst. 18(4), 643–656, 2007
Lenells, J.: The Hunter–Saxton equation: a geometric approach. SIAM J. Math. Anal. 40(1), 266–277, 2008
McKean, H.P.: Breakdown of a shallow water equation. Asian J. Math. 2(4), 867–874, 1998. (Mikio Sato: a great Japanese mathematician of the twentieth century)
McKean, H.P.: Breakdown of the Camassa–Holm equation. Commun. Pure Appl. Math. 57(3), 416–418, 2004
Michor, P.W., Mumford, D.: Vanishing geodesic distance on spaces of submanifolds and diffeomorphisms. Doc. Math. 10, 217–245, 2005. (electronic)
Misiołek, G.: A shallow water equation as a geodesic flow on the Bott–Virasoro group. J. Geom. Phys. 24(3), 203–208, 1998
Misiołek, G., Preston, S.C.: Fredholm properties of Riemannian exponential maps on diffeomorphism groups. Invent. Math. 179(1), 191–227, 2010
Müller, O., Nardmann, M.: Every conformal class contains a metric of bounded geometry. Math. Ann. 363(1–2), 143–174, 2015
Preston, S.C., Washabaugh, P.: Euler–Arnold equations and Teichmüller theory. Differ. Geom. Appl. 59, 1–11, 2018
Ratiu, T., Schmid, R.: The differentiable structure of three remarkable diffeomorphism groups. Math. Z. 177(1), 81–100, 1981
Shelukhin, E.: The Hofer norm of a contactomorphism. J. Symplectic Geom. 15(4), 1173–1208, 2017
Shkoller, S.: Smooth global Lagrangian flow for the 2D Euler and second-grade fluid equations. Appl. Mat. Lett. 14(5), 539–543, 2001
Shnirelman, A.: Generalized fluid flows, their approximation and applications. Geom. Funct. Anal. 4(5), 586–620, 1994
Shnirelman, A.I.: The geometry of the group of diffeomorphisms and the dynamics of an ideal incompressible fluid. Math. USSR-Sb. 56(1), 79–105, 1987
Sickel, W., Ullrich, T.: Tensor products of Sobolev-Besov spaces and applications to approximation from the hyperbolic cross. J. Approx. Theory161(2), 748–786, 2009
Triebel, H.: Theory of Function Spaces. Birkhäuser, Boston 1983
Triebel, H.: Theory of Function Spaces II. Birkhäuser, Boston 1992
Triebel, H.: The Structure of Functions, Monographs in Mathematics, vol. 97. Birkhäuser Verlag, Basel 2001
Vizman, C.: Geodesic equations on diffeomorphism groups. Symmetry Integr. Geom. Methods Appl. 4, 30, 2008
Washabaugh, P.: The SQG equation as a geodesic equation. Arch. Ration. Mech. Anal. 222(3), 1269–1284, 2016
Wolibner, W.: Un theorème sur l’existence du mouvement plan d’un fluide parfait, homogene, incompressible, pendant un temps infiniment long. Math. Z. 37, 698–726, 1933
Wunsch, M.: On the geodesic flow on the group of diffeomorphisms of the circle with a fractional Sobolev right-invariant metric. J. Nonlinear Math. Phys. 17(1), 7–11, 2010
Acknowledgements
We would like to thank Martins Bruveris, Stefan Haller, Robert Jerrard, Cy Maor, Peter Michor, and Gerard Misiołek for helpful comments and discussions during the preparation of this manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by V. Šverák
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
MB was partially supported by NSF-Grant 1912037 (collaborative research in connection with NSF-Grant 1912030). MB was also supported by a first year assistant professor award of the Florida State University. PH was supported by the Freiburg Institute of Advances Studies in the form of a Junior Fellowship. SCP was partially supported by Simons Foundation Collaboration Grant for Mathematicians No. 318969. SCP was also supported by a PSC-CUNY Award, jointly funded by The Professional Staff Congress and The City University of New York.
Rights and permissions
About this article

Cite this article
Bauer, M., Harms, P. & Preston, S.C. Vanishing Distance Phenomena and the Geometric Approach to SQG. Arch Rational Mech Anal 235, 1445–1466 (2020). https://doi.org/10.1007/s00205-019-01449-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00205-019-01449-7