
Abstract
Bearing failures in electrical machines pose significant challenges, attracting attention in diagnostic research. The widespread adoption of variable-speed drives across various motor applications has increased the effects of bearing currents, necessitating thorough exploration in both academic and industrial contexts. The paper contributes valuable insights into identifying and addressing bearing-related issues in electrical machines. It comprehensively investigates the matter, investigating damage types and diagnostic techniques specific to bearing currents in induction machines. Moreover, it provides insights from experiments conducted in controlled laboratory settings to replicate bearing current faults. As the industry integrates advanced technologies into manufacturing processes and gains traction, preventive maintenance is increasingly emphasized. Consequently, the paper expands its investigation into signal pre-processing to enhance fault prediction accuracy by optimizing machine signals. Given the dynamic nature of industrial standards and the growing demand for predictive maintenance strategies, this research presents a predictive method for early fault detection. Aiming for heightened efficiency, reduced downtime, and enhanced reliability, the perspectives outlined in this paper make a meaningful contribution to the evolving field of predictive maintenance.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nowadays, electrical machines and drive systems play a pivotal role in various domestic and industrial sectors. Their widespread use has brought maintenance concerns to the forefront. Among these machines, three-phase induction motors are particularly prominent due to their ability to meet various industrial needs, such as low maintenance, cost-effectiveness, compact design, and variable control capabilities. Using frequency converters for control is the most cost-effective method and ensures optimal performance [1]. However, this approach can lead to the generation of induced shaft currents. Numerous cases in the literature are related to power electronics and bearing currents. Authors in [2] discuss a reduction in common mode voltage and bearing currents in the DC-link inverters. In Plazenet et al. [3], the influence of parameters on discharge bearing currents in inverter-fed induction motors is introduced. Authors in [4] present mitigation techniques and modeling for high-frequency bearing currents in inverter-fed AC drives. In Xu et al. [5], the authors discuss the experimental assessment of high-frequency bearing currents in the induction motor driven by a silicon carbide inverter.
Identifying surface damage resulting from shaft currents on bearings is typically challenging, especially visually. Shaft currents don't consistently pass through the bearing. However, when they do, faults often appear in areas where the lubricant coating is thinnest due to heightened stress. Shaft currents pose a significant challenge in various industries [6]. Case studies and their solutions can be found in wind turbines [7], marine applications [8], assembly lines [9], and food production [10]. Each energy system is complex, and ensuring device reliability requires monitoring numerous parameters, which demands substantial computational resources and modern technologies. Given the vast amount of data, employing advanced diagnostic methodologies rooted in artificial intelligence becomes logical [11]. These intelligent algorithms not only detect defects but also forecast potential faults in the future. Among various methods available, machine learning-based algorithms are the most prevalent tools for diagnosing rotating machines. They create a complex weighted combination based on training data, which can later be used to deduce results for incoming data [12]. When it comes to diagnosing bearing issues in electrical machines, commonly employed machine learning techniques include decision trees [13], support vector machines [14], principal component analysis [15], and genetic algorithms [16]. Additionally, various neural network variations are utilized, such as convolutional neural networks [17], generative neural networks [18], and deep learning approaches [19]. This research has prioritized neural network-based approaches for their ability to learn quickly and effectively.
This study makes significant contributions to the field of predictive maintenance by addressing the critical challenge of acquiring training datasets for implementing artificial intelligence algorithms. This systematic approach enriches the available datasets and provides valuable insights into the early detection and diagnosis of bearing faults. Consequently, it advances the development and implementation of predictive maintenance strategies.
The paper thoroughly investigates bearing currents in induction machines, covering damage types and diagnostic techniques, particularly emphasizing preventive maintenance strategies. Various faults were deliberately induced in laboratory settings to overcome the challenge of acquiring training datasets for artificial intelligence algorithms in predictive maintenance. The study underscores the significance of vibration signals in the early detection of bearing faults, mathematically describing them in four natural frequencies. Datasets encompass data from current, voltage, torque, speed, and vibration collected under different control settings and loads. Additionally, the paper explores machine learning approaches for fault detection and prediction, enriching available datasets and offering insights into early fault detection and diagnosis, thus advancing the development and implementation of predictive maintenance strategies in industrial settings.
This manuscript is organized as follows. Chapter 2 introduces the nature of bearing currents. Chapter 3 presents the possibility of detecting bearing currents in the machine. Chapter 4 describes the most typical damages inflicted by bearing currents. In Chapter 5, the bearing faults caused by bearing currents are performed in the lab environment. Chapter 6 presents a pre-processing of the datasets to get predictions in Chapter 7.
2 Bearing currents
At present, the most cost-effective and straightforward means of ensuring optimal performance of electrical machines involves the application of frequency converter control. This strategy is widely embraced globally, resulting in a heightened adoption of power electronics. However, these solutions often give rise to shaft currents induced by the frequency converter, presenting an escalating challenge in modern industry.
Despite the longstanding acknowledgment of bearing currents in electrical machines, which has persisted for nearly a century, it remains a prominent area of investigation [20]. Failures arising from bearing currents inflict significant mechanical damage on electrical machines. In contemporary drive systems, deploying converters contributes to a phenomenon wherein current traverses the circuit, encompassing the bearings, frame, and machine shaft [21]. Although mitigation measures are increasingly employed to tackle bearing currents, it is noteworthy that they may inadvertently engender reliability concerns and necessitate additional maintenance [22].
In general, bearing currents can be classified into two primary types: classical bearing currents and inverter-induced bearing currents.
2.1 Classical bearing currents
In 1927, it was observed that the presence of theoretical and practical indications of bearing current could be eliminated if an ideally balanced and symmetrical motor design was achievable [23]. Typically, these issues stem from structural irregularities within the machine, including static or dynamic eccentricity, design inconsistencies, unbalanced power supply, laminations with broken connections, and faults in the rotor [24]. This phenomenon was demonstrated in [25] through simulations, wherein broken rotor bars produced eddy currents in the shaft, leading to bearing damage. The asymmetry of the magnetic field induces a current in the motor shaft, resulting in a measurable potential difference between both ends of the shaft. According to standards, a shaft voltage exceeding 300 mV is considered detrimental to bearings, although lower levels may also cause damage if persisting for prolonged periods. Despite enhancements in design tolerances and the quality of production materials, the monitoring of bearing currents remains essential due to their potential risk to ball bearings. This concern becomes particularly critical for motors starting from 100 kW. Additionally, classical bearing currents can be readily detected in motors from 7.5 kW [26]. Furthermore, it is advisable to implement preventive measures against bearing currents, such as insulated bearings or shafts, in motors starting from 18.5 kW [27].
2.2 Inverter-induced bearing currents
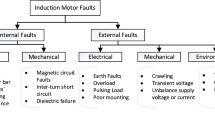
Inverter-induced bearing currents encompass several categories: electrical discharge machining bearing currents, capacitive bearing currents, bearing currents caused by rotor ground currents, and high-frequency circulating bearing currents. The classification of these currents is illustrated in Fig. 1. The primary source of these currents is the common mode voltage generated by the inverter and the rapid voltage fluctuations (high du/dt) at the motor terminals [28]. This phenomenon is the root cause of various types of bearing currents capable of causing damage to bearings in motors operating with variable-speed drives. As a result of coupling, the bearing capacitance and other parasitic capacitances become charged, leading to a voltage buildup on the motor shaft. If this accumulated voltage surpasses the breakdown voltage of the lubrication film, capacitive energy discharges occur through the bearings, resulting in electrical discharge machining current flow. The path of current travels from the shaft to the frame, passing through the rings and rolling elements of the bearing. Shaft voltages ranging from 3 to 30 V are significant enough to induce discharges in the bearings [29], with voltage levels typically between 3 and 10% of the electrical machine's nominal voltage [30].

Categorization of bearing currents
The rapid fluctuations in the common mode voltage trigger high-frequency common mode currents to traverse various components of the motor, including the windings, stator laminations, air gap, rotor, shaft, and bearings [29]. These currents emerge from transistor switching during each switching event. At higher speeds, a thin dielectric layer forms between the bearing races and rolling elements, establishing a capacitive connection between the machine frame and the shaft. Typically, these currents range from 5 to 10 mA and are generally considered non-detrimental to the bearings and motor [31].
Bearing currents arising as rotor ground currents stem from inadequate grounding of the motor frame [32]. This situation often arises when the rotor is grounded through the driven load, resulting in a more robust grounding than the stator. This current traverses through the motor bearings to the shaft, the load, and the controlling converter.
Regarding high-frequency circulating bearing currents, the process involves the rapid du/dt of the voltage at the machine terminals, generating additional high-frequency common mode currents and parasitic capacitances between the motor winding and stator laminations. With frequencies reaching several megahertz, these currents ingress the rotating machine through the windings and exit through the frame and laminations, creating a high-frequency circular magnetic flux around the motor shaft. This flux induces a shaft voltage that, if adequate, discharges through the bearings, generating a circulating current in the bearings, shaft, and motor frame, potentially surpassing the lubricant's breakdown voltage.
3 Diagnostic and reduction possibilities of bearing currents
Several techniques exist for detecting bearing currents in electrical machines, such as the Rogowski coil [33], current transformer [34], and a conventional multimeter. However, given that bearing faults predominantly affect vibration rather than the current spectrum, vibration analysis emerges as a viable option [35]. Diagnostic approaches for bearing currents generally fall into direct and indirect methods [36].
3.1 Direct methods
Direct diagnostic methods are favored for promptly detecting shaft currents. Detecting bearing currents in the motor enables timely intervention to prevent faults, ultimately safeguarding the bearings of the electrical machine [37]. While this approach identifies bearing currents, it provides only an indirect indication. A multimeter can indicate if bearings are prone to sparking, but precise measurement of shaft voltage requires a multimeter with high input impedance for optimal accuracy.
A universal and practical measuring device is recommended for a comprehensive assessment of various motor currents, shapes, and parameters. Oscilloscopes with a bandwidth exceeding 100 MHz are preferred for this purpose. Considering and recording ambient magnetic field levels are crucial, as oscilloscopes are more susceptible to noise and interference than multimeters. When focusing on motor bearings, measuring only shaft voltage and current is typically sufficient.
When measuring shaft currents, the oscilloscope's settings depend on factors such as motor size, speed, bearing type, and temperature. Time scale reduction could start at approximately 500 microseconds, while voltage increase could begin at around 5 V. Shaft voltage usually mirrors phase voltage unless spark discharges occur in the bearings, leading to voltage fluctuations of ± 20…80 V every 10 microseconds.
Alternatively, shaft currents can be measured using a current transformer and a high-frequency non-inductive (coaxial) shunt, preferably alongside an oscilloscope. Non-inductive shunts, comprising two conductive tubes, mitigate shunt saturation compared to current transformers but may face challenges with transient currents and self-inductance. Due to the temperature coefficient of the shunt material resistance, adjustment of measurement results or adherence to specified temperature ranges may be necessary.
Using a Rogowski coil is a common, straightforward, and safe method for measuring phase and motor shaft currents. During phase current measurements, the coil should encircle power cables (excluding the neutral cable), while for shaft current measurements, it should encircle the motor shaft. If multiple power cables are present, the coil should encompass all cables. A Rogowski measuring device connected to a logger or oscilloscope, preferably with a bandwidth exceeding 100 MHz, facilitates shaft current measurements. However, the Rogowski coil requires additional electronics and power supply and is susceptible to noise, necessitating attention to electromagnetic compatibility.
3.2 Indirect methods
Indirect diagnostic methods for detecting bearing currents in electrical machines are used only after the bearing surfaces have suffered damage, prompting the rolling bodies to produce vibration and noise. Moreover, identifying shaft currents indirectly demands expertise and thorough training due to the diverse bearing damage types.
Vibration analysis stands as a commonly utilized tool in electrical machine diagnostics. While vibration analysis effectively pinpoints bearing faults, discerning faults arising from bearing and shaft currents amid other mechanical defects in the bearings can pose a challenge. Thus, when such current-induced failure modes are suspected, vibration analysis must complement other direct or indirect diagnostic techniques to validate findings and ensure diagnostic accuracy.
Ultrasonic detectors are also suitable tools for indirectly detecting bearing currents. Similar to vibration analysis, the ultrasonic spectrum exhibits sound peaks resulting from passing shaft currents. Beyond data analysis, ultrasonic detectors allow for listening to bearing defects like a stethoscope. While theoretically capable of detecting spark discharges generated by shaft currents in bearings, the low level of spark discharges within the ultrasonic range (with a maximum power of about 200 MHz) renders this method challenging to implement in practice.
3.3 Limitation possibilities
In the case of motors with a power of more than 100 kW, there are some solutions to decrease bearing currents. Table 1 summarizes the main options for reducing bearing currents.
The effectiveness of these methods primarily depends on motor parameters and the surrounding environment. However, shaft current leakage remains a risk.
4 Damages of bearing currents
During the initial phases, detecting damages caused by electrical currents in the bearings often necessitates dismantling the electrical machine, which isn't practical. Instead, subtle deviations from standard specifications on the bearing races may be observed at a microscopic level. Visually, faults resulting from bearing currents stand out from other mechanical defects [46]. It is crucial to visually inspect replaced bearings, especially if changes occur during maintenance and there are concerns about shaft currents. The impact of these currents on the bearing is influenced by factors such as lubricant type, rotational speed, applied current, operating duration, and material condition.
Typically, damages induced by electrical currents become apparent only in later stages when the bearing surface has already been compromised. Faults resulting from these currents often manifest in areas with the thinnest lubrication layer, experiencing heightened stress. One common manifestation is "fluting," as depicted in Fig. 2a, where multiple lines form across the bearing raceways. Fluting is frequently associated with constant rotational speeds and low voltage. Additionally, frosting and pitting can occur due to bearing currents. However, the focus of this paper is primarily on the fluting fault.

Common fault caused by bearing currents (fluting)
Changes in the lubricant's condition can also serve as indicators of motor issues, with darkening often attributed to bearing currents. Sparking can result in lubricant oxidation and darkening due to electrical discharges, as observed in experiments depicted in Fig. 3.

Lubricant darkening due to discharges
5 Implementation of bearing current fault in the laboratory environment
To mitigate severe consequences and economic losses in production, it is advisable to implement strategies related to predictive maintenance. The system can be trained to predict potential failures using artificial intelligence algorithms in this context. However, acquiring the necessary training datasets is a significant challenge in implementing such approaches. To achieve accurate forecasting, gathering a large quantity of high-quality datasets is crucial. Hence, various faults were intentionally induced on the bearings in laboratory settings.
Faults were induced in healthy bearings to obtain faulty bearings for experimentation. An experimental test bench for fault implementation was meticulously constructed to facilitate this investigation. As previously mentioned, fluting typically occurs under conditions of low voltage and constant rotational speed, frosting manifests when the motor operates at variable speeds, and pitting is commonly observed in situations involving low speed and a high-voltage power source. The radial load was applied to the bearings through the belt's tension. An experimental test bench was constructed to investigate and analyze these different scenarios, as illustrated in Fig. 4.

Experimental test bench for implementation of bearing current faults: (1) non-drive end bearing, (2) drive end bearing, (3) belt, (4) servo drive, (5) power supply
Faults were intentionally induced under controlled conditions to mimic real-world scenarios. A diverse range of failures induced by bearing currents were successfully replicated through rigorous experimentation. Table 2 presents an analysis of all studied cases with shaft current faults.
In this paper, there were studied the fluting failure that appeared in case of 500 r/min and 10 A. In this scenario, the lubricant exhibited a slight darkening. With an increase in rotational speed, a clear case of fluting was observed on the inner raceway and a darkening on the outer raceway in the case of the DE-bearing, as illustrated in Fig. 5. Meanwhile, the NDE bearing displayed darkened inner and outer raceways with subtle fluting trails. Additionally, both bearings showed darkening of the rolling elements.

DE bearing at 500 r/min and 10 A
6 Data analysis
Induction machines are the most spread among other motor types in production due to their easy maintenance, low cost, and high efficiency [47]. These machines are typically employed in variable-speed drives, which utilize power electronics for motor control, often using a frequency converter. Consequently, there is a rising incidence of inverter-induced shaft and bearing currents. This study focused on testing bearing faults in induction machines, and the experimental test bench is illustrated in Fig. 6. The setup comprises a testing machine, a loading machine, an accelerometer, and an acquisition system.

Experimental test bench
Dewetron DEWE2-M18 was used as an acquisition system for data gathering and processing. The parameters of the testing and loading motors are as follows:
Parameter on induction motor | Value | ||
|---|---|---|---|
Voltage, V | Y 690 | D 400 | D 460 |
Frequency, Hz | 50 | 50 | 60 |
Speed, r/min | 1460 | 1460 | 1760 |
Power, kW | 7.5 | 7.5 | 7.5 |
Current, A | 8.8 | 15.3 | 12.9 |
Power factor | 0.79 | 0.79 | 0.81 |
Regarding bearing faults, their primary impact is on vibration rather than the current spectrum. The vibration spectrum is essential in this analysis of damaged bearings. In the experiments, a triaxial accelerometer K-Shear ± 100 g with a sensitivity of 50 mV/g placed over the shaft was used for vibration measurements. The rated values are related to acceleration and measured in g. The placement of the accelerometer is presented in Fig. 7.

Placement of triaxial accelerometer over the shaft
This study's datasets encompassed information extracted from various parameters, including current, voltage, torque, speed, and vibration. Data collection occurred under diverse control settings (grid-fed, scalar, DTC) and various loads (0–100%). To streamline the process and optimize resource usage, it was unnecessary to analyze the entire signal. Focusing on one or two specific regions where the fault's influence is most pronounced sufficed. The primary objective involved identifying these crucial signal segments for training and extracting significant patterns.
As a result, numerous datasets contain precise information about healthy and faulty conditions. Vibration signals can detect faults at a very early stage. For this reason, prioritizing vibration signals is common practice in cases of defective bearings [48]. Identifying the frequency components associated with faults is crucial to detect early-stage damage. One effective method for pinpointing faults is employing the fast Fourier transform (FFT), which unveils the presence of these faulty frequencies. Figure 8 illustrates the vibration spectra of healthy and faulty bearings affected by fluting. Notably, the amplitude of the faulty bearing significantly surpasses that of the healthy one. This discrepancy arises because the damaged bearing encounters difficulties in the rotation due to surface damage. The fault exerts its most notable influence on the spectrum within the 0–500 Hz range, affecting even harmonics, especially at 100 and 300 Hz. In the 500–1000 Hz range, there are no prominent harmonics except for the 700 Hz frequency, which warrants examination for potential patterns during training. Frequencies beyond 1000 Hz do not significantly impact the analysis.

Vibration spectrum of healthy bearing and bearing with fluting
When conducting training, it is crucial to consider the control environment's characteristics. The amplitude and features of fundamental harmonics differ based on the type of control mode, especially when dealing with a faulty bearing. DTC exhibits a noticeable alteration in harmonics. In such cases, the fault's most pronounced impact on the spectrum is typically observed within the 0–500 Hz range, particularly affecting even harmonics. Conversely, the 500–1000 Hz range usually lacks prominent harmonics, except for the even harmonic at 700 Hz.
Furthermore, the load factor plays a significant role in shaping the fault's characteristics, as presented in Fig. 9. Load variations result in frequency shifts. Higher loads also have a greater influence on side harmonics. Like previous instances, the fault demonstrates its greatest impact within the 0–500 Hz frequency range.

Vibration spectrum of bearing with fluting under different loads
These distinctive patterns offer valuable insights for effectively training the system. To improve prediction accuracy, it is advisable to consider various parameters of motor operation.
7 Fault prediction
In the case of predictions, the fluting case was studied. The data collected from the test bench are based on the impact of fluting on different areas of bearings, including inner and outer raceways. The same data were then utilized for training machine learning models to detect and predict fluting faults on different bearing parts. This research employs two distinct approaches in machine learning for fault detection and prediction of fluting faults. The initial approach involves training diverse machine learning models to detect damages on inner and outer raceways due to the fluting. The second approach centers on fault prediction, employing a machine learning method based on signal spectra to train data and evaluate the likelihood of specific faults occurring. The technique implemented in this study is described in Fig. 10.

Flowchart of the implemented method
Machine learning models were employed to pinpoint faults upon collecting data samples from the electrical machine, encompassing instances of bearing faults and healthy states. Before training, the collected data underwent preprocessing, including denoising and normalization [49]. Denoising involved the use of low-pass filters and median filtering. The denoised signal was then segmented into datasets and divided into training and testing sets, with 20% of the data reserved for model validation. The electrical machine's sampling frequency was set at 20 kHz. The training dataset comprises 23 million data points with a sampling frequency of 20 kHz, covering various manifestations of healthy and faulty signals, including inner and outer faults. For this study, eight distinct machine learning models were selected to compare result accuracies. Table 3 thoroughly compares the validation accuracies of these models for bearing fault detection, covering all three scenarios of healthy states, inner faults, and outer faults. It is essential to highlight that these results have the potential for further improvement by incorporating higher-quality data and continuous endeavors to optimize the training of machine learning models. The results show that the Coarse Gaussian SVM demonstrates the highest validation accuracy among the trained models, closely followed by the Fine KNN model, which achieves equivalent accuracy.
The configurations for each model were set to be general and were not extensively optimized for improved results in this specific study. Careful consideration was given to the settings for each model to prevent overfitting on the training datasets. These same settings were considered when approaching the second part of the methodology to ensure a fair comparison between the trained models. Further enhancements can be explored by optimizing parameters for each machine learning model. In the case of neural network models, consideration was given to models with up to 16 hidden layers featuring a variable number of neurons, reaching up to 1000 per layer. Figure 11 illustrates the validation accuracy achieved by some of these trained models. It also displays the validation results for three of the trained models. In this study, eight different machine learning models were utilized for training and validating the model.

Machine learning results a coarse tree, b trilayered neural network, c coarse Gaussian SVM
Although the neural network-trained models exhibit a slight lag in performance, there is optimism that with the inclusion of higher-quality data, it may be possible to refine and enhance the accuracy of these machine learning models. In the realm of fault prediction, the same models will be scrutinized. Still, the data will be prepared using a signal spectrum-based approach to assess whether the models can maintain high accuracy for predictions or if any notable changes occur.
The denoised data are now utilized to identify unique frequency components within inner and outer bearing faults, aiding in identifying fault occurrences within the incoming signal. This strategic use of denoised data holds promise for improving the precision of fault predictions. The gathered data are employed to identify frequency components crucial for training the machine learning algorithm for predictive purposes. This process is carried out independently for each case, with the frequency components identified based on disparities in their amplitudes between healthy and faulty scenarios. The chosen components are subsequently utilized in the algorithm training. An illustrative example of these components, along with their normalized amplitudes ranging from 0 to 1, is depicted in Fig. 12.

Frequency spectrum with normalized amplitude of identified frequency components (0–1)
Through meticulous analysis of multiple samples, distinctive frequency components are identified for each occurrence of faults. These frequency components play a crucial role in delineating the range for the transition state, which represents the point at which a motor transitions from a healthy state to a faulty one. This information is vital in preparing data for training machine learning models to predict bearing faults. Every possible combination of frequency component values during the transition state is utilized in data preparation. Subsequently, the faults are categorized into five labels, with specific details outlined in Table 4.
The trained models underwent blind validation; a subset of the accuracy validation results is depicted in Fig. 13.

Machine learning results a coarse tree, b coarse Gaussian SVM, c bilayered neural network
Table 5 compares the same models and their validation accuracies in the context of the fault prediction model. The accuracy of the models varies based on the complexity of each model. Nevertheless, the second approach proves valuable in predicting fault occurrences in the machine by issuing a warning in advance, signaling the likelihood of a specific fault. This early warning capability holds significant potential for mitigating economic losses. The accuracy of fault prediction hovers around 90%, a commendable result as it reliably identifies two faults with heightened accuracy. While these tests and models were evaluated using real-time data acquired from electrical machines, it is noteworthy that specific models claim up to 95% accuracy for fault detection based on analytical equations or simulations. However, such high-accuracy claims might not necessarily hold in real-time scenarios, as evident from Table 5; when the training data become more complex, models trained using neural networks demonstrate superior results compared to other methods.
The accuracy of these neural network models has notably increased compared to other models. Further improvements in accuracy can be achieved by training with higher-quality data and by combining multiple models trained in a singular fault detection model. The coarse tree stands out as the best performing model for fault detection, while its accuracy in fault prediction is comparatively lower. However, neural network models maintain a commendable level of accuracy, with the bilayered neural network yielding the best results in fault prediction. This underscores the potential for neural network models to achieve even better results with increased complexity and utilizing superior quality data samples.
8 Discussion and conclusion
Induction motors play a critical role in various industrial applications, and failures in electrical machines, particularly in bearings, can have severe consequences. Monitoring the health of induction motors and their components has become standard practice in today's industry, thanks to the advent of the Internet of Things (IoT). As the industry shifts toward predictive maintenance, timely fault diagnosis has become paramount to prevent catastrophic failures. Consequently, academic research increasingly focuses on predictive maintenance for electrical machines, including induction motors.
This paper analyzes the causes of bearing faults, diagnostic possibilities, and a technique for predicting such faults. The results indicate that the method used for pre-fault detection in bearings achieves a high level of accuracy, approximately 90%, when employing neural networks. Frequency components were carefully chosen to pinpoint faults, aiding in model training. Subsequently, amplitudes of these selected frequency components were assessed for both faulty and healthy scenarios. Various combinations were then generated to detect faults in the electrical machine. These combinations were utilized to train additional models to determine the probability of fault occurrence within the machine.
Therefore, this technique effectively monitors and diagnoses faults in induction motors. However, validating the algorithm across various use cases and a broader range of faults is advisable. The algorithms trained using this approach can be deployed for real-time monitoring and detecting bearing faults in induction motors. Additionally, there is potential for further improvement by considering all potential faults exhibiting current fluctuations. In the future, it will be considered to train the algorithm for different fault types based on different spectra.
Data availability
Not applicable.
References
Palacios RHC, Da Silva IN, Goedtel A, Godoy WF, Lopes TD (2017) Diagnosis of stator faults severity in induction motors using two intelligent approaches. IEEE Trans Ind Inform 13(4):1681–1691
Turzynski M, Chrzan PJ (2020) Reducing common-mode voltage and bearing currents in quasi-resonant DC-link inverter. IEEE Trans Power Electron 35(9):9555–9564
Plazenet T, Boileau T, Boileau CC, Nahid-Mobarakeh B (2021) Influencing parameters on discharge bearing currents in inverter-fed induction motors. IEEE Trans Energy Convers 36(2):940–949
Zhu W, De Gaetano D, Chen X, Jewell GW, Hu Y (2022) A review of modeling and mitigation techniques for bearing currents in electrical machines with variable-frequency drives. IEEE Access 10(December):125279–125297
Xu Y, Liang Y, Yuan X, Wu X, Li Y (2021) Experimental assessment of high frequency bearing currents in an induction motor driven by a SiC inverter. IEEE Access 9:40540–40549
Plazenet T, Boileau T, Caironi C, Nahid-Mobarakeh B (2018) A comprehensive study on shaft voltages and bearing currents in rotating machines. IEEE Trans Ind Appl 54(4):3749–3759
AEGIS (2020) Wind energy with no downtime—Study Case I
AEGIS (2019) Commercial ships without bearing protection for critical systems, commercial ships can end up dead in the water—study case II
AEGIS (2017) Protecting VFD—driven motors in distribution—case study III
AEGIS (2017) Protecting VFD—driven motors in dairy production—case study IV
Kudelina K, Vaimann T, Asad B, Rassõlkin A, Kallaste A, Demidova G (2021) Trends and challenges in intelligent condition monitoring of electrical machines using machine learning. Appl Sci 11(6):2761
Raja HA, Kudelina K, Asad B, Vaimann T (2022) Fault Detection and Predictive Maintenance for Electrical Machines. In: New trends in electric machines—technology and applications, IntechOpen
Senanayaka JSL, Van Khang H, Robbersmyr KG (2017) Towards online bearing fault detection using envelope analysis of vibration signal and decision tree classification algorithm. In: 2017 20th Int. Conf. Electr. Mach. Syst. ICEMS 2017, pp 13–18
Pandarakone SE, Mizuno Y, Nakamura H (2017) Distinct fault analysis of induction motor bearing using frequency spectrum determination and support vector machine. IEEE Trans Ind Appl 53(3):3049–3056
Zhao S, Chen C, Luo Y (2020) Probabilistic principal component analysis assisted new optimal scale morphological top-hat filter for the fault diagnosis of rolling bearing. IEEE Access 8:156774–156791
Toma RN, Prosvirin AE, Kim JM (1884) Bearing fault diagnosis of induction motors using a genetic algorithm and machine learning classifiers. Sensors 20(7):2020
Zhu J, Chen N, Peng W (2019) Estimation of bearing remaining useful life based on multiscale convolutional neural network. IEEE Trans Ind Electron 66(4):3208–3216
Mao W, Liu Y, Ding L, Li Y (2019) Imbalanced fault diagnosis of rolling bearing based on generative adversarial network: a comparative study. IEEE Access 7:9515–9530
Zhang S, Zhang S, Wang B, Habetler TG (2020) Deep learning algorithms for bearing fault diagnosticsx—a comprehensive review. IEEE Access 8:29857–29881
Tawfiq KB, Güleç M, Sergeant P (2023) Bearing current and shaft voltage in electrical machines: a comprehensive research review. Machines 11(5):550. https://doi.org/10.3390/machines11050550
Berhausen S, Jarek T, Orság P (2022) Influence of the shielding winding on the bearing voltage in a permanent magnet synchronous machine. Energies (Basel) 15(21):8001. https://doi.org/10.3390/en15218001
Plazenet T, Boileau T, Caironi C, Nahid-Mobarakeh B (2018) A comprehensive study on shaft voltages and bearing currents in rotating machines. IEEE Trans Ind Appl 54(4):3749–3759. https://doi.org/10.1109/TIA.2018.2818663
Baldor Electric Company, Inverter-driven induction motors—shaft and bearing current solutions. Ind White Pap
Kallaste A, Vaimann T, Belahcen A (2014) Possible manufacturing tolerance faults in design and construction of low speed slotless permanent magnet generator. In: 2014 16th Eur Conf Power Electron Appl EPE-ECCE Eur 2014
Vaimann T, Belahcen A, Kallaste A (2014) Changing of magnetic flux density distribution in a squirrel-cage induction motor with broken rotor bars. Elektron ir Elektrotechnika 20(7):11–14
Tom Bishop (2017) Dealing with Shaft and Bearing Currents
Welkon Limited, Insulated Bearing—Insulated Shaft
Chen S, Lipo TA (1996) Source of induction motor bearing currents caused by PWM inverters. IEEE Trans Energy Convers 11(1):25–32
Särkimäki V (2009) Radio frequency measurement method for detecting bearing currents in induction motors. Lappeenranta University of Technology, Lappeenranta
Mütze A, Binder A (2007) Calculation of motor capacitances for prediction of the voltage across the bearings in machines of inverter-based drive systems. IEEE Trans Ind Appl 43(3):665–672
Mütze A, Binder A (2006) Don’t lose your bearings—mitigation techniques for bearing currents in inverter-supplied drive systems. IEEE Ind Appl Mag 12(4):22–31
Ollila J, Hammar T, Iisakkala J, Tuusa H (1997) On the bearing currents in medium power variable speed AC drives. In: International electric machines and drives conference
Quabeck S, Braun L, Fritz N, Klever S, De Doncker RW (2021) A machine integrated rogowski coil for bearing current measurement. In: 13th Int Symp Diagnostics Electr Mach Power Electron Drives, pp 17–23
Li J, Water W, Zhu B, Lu J (2015) Integrated high-frequency coaxial transformer design platform using artificial neural network optimization and FEM simulation. IEEE Trans Magn 51(3):1–4
Immovilli F, Bellini A, Rubini R, Tassoni C (2010) Diagnosis of bearing faults in induction machines by vibration or current signals: a critical comparison. IEEE Trans Ind Appl 46(4):1350–1359
Kudelina K, Vaimann T, Rassõlkin A, Kallaste A, Demidova G, Karpovich D (2021) Diagnostic Possibilities of Induction Motor Bearing Currents. In: Int Sc. Tech Conf Altern Curr Electr Drives
Lei Y, Li N, Gontarz S, Lin J, Radkowski S, Dybala J (2016) A model-based method for remaining useful life prediction of machinery. IEEE Trans Reliab 65(3):1314–1326
Han P, Heins G, Patterson D, Thiele M, Ionel DM (2020) Evaluation of bearing voltage reduction in electric machines by using insulated shaft and bearings. In: ECCE 2020—IEEE energy convers congr expo, pp 5584–5589
Gonda A, Capan R, Bechev D, Sauer B (2019) The influence of lubricant conductivity on bearing currents in the case of rolling bearing greases. Lubricants 7(12):108
Oh HW, Willwerth A (2008) Shaft grounding—a solution to motor bearing currents. Am Soc Heating Refrig Air Cond Eng Trans 114(2):246–251
Mechlinski M, Schroder S, Shen J, De Doncker RW (2017) Grounding concept and common-mode filter design methodology for transformerless mv drives to prevent bearing current issues. IEEE Trans Ind Appl 53(6):5393–5404
Kudelina K, Vaimann T, Rassolkin A, Kallaste A (2021) Possibilities of decreasing induction motor bearing currents. In: 2021 IEEE Open Conf Electr Electron Inf Sci eStream 2021—Proc
Weicker M, Pöss H-J (2023) Reduction of circulating bearing currents in dependence of nanocrystalline common-mode current ring cores. In: 2023 25th European Conference on Power Electronics and Applications (EPE'23 ECCE Europe), Aalborg, Denmark, pp 1–8. https://doi.org/10.23919/EPE23ECCEEurope58414.2023.10264251.
Weicker M, Bello G, Kampen D, Binder A (2020) Influence of system parameters in variable speed AC-induction motor drives on parasitic electric bearing currents. In: 2020 22nd European Conference on Power Electronics and Applications (EPE'20 ECCE Europe), Lyon, France, pp 1–10. https://doi.org/10.23919/EPE20ECCEEurope43536.2020.9215613.
Zehelein M, Fischer M, Nitzsche M, Roth-Stielow J (2019) Influence of the filter design on wide-bandgap voltage source inverters with sine wave filter for electrical drives. In: 2019 21st european conference on power electronics and applications (EPE '19 ECCE Europe), Genova, Italy, pp P.1-P.10. https://doi.org/10.23919/EPE.2019.8914968.
Kudelina K, Vaimann T, Kallaste A, Asad B, Demidova G (2021) Induction motor bearing currents—causes and damages. In: 28th Int Work Electr Drives Improv Reliab Electr Drives
Kudelina K, Asad B, Vaimann T, Rassõlkin A, Kallaste A (2020) Production quality related propagating faults of induction machines. In: Int Conf Electr Power Drive Syst
Silva JLH, Cardoso AJM (2005) Bearing failures diagnosis in three-phase induction motors by extended Park’s Vector approach. In: IECON Proc. Industrial Electron. Conf, vol 2005, pp 2591–2596
Raja HA, Kudelina K, Asad B, Vaimann T, Kallaste A, Rassõlkin A, Khang HV (2022) Signal spectrum-based machine learning approach for fault prediction and maintenance of electrical machines. Energies 15:9507. https://doi.org/10.3390/en15249507
Author information
Authors and Affiliations
Contributions
Conceptualization was performed by KK; methodology by KK, HAR; formal analysis and investigation by MUN, SA; writing—original draft preparation—by KK; writing—review and editing—by BA, AK; funding acquisition by TV; supervision by AK.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kudelina, K., Raja, H.A., Naseer, M.U. et al. Study of bearing currents in induction machine: diagnostic possibilities, fault detection, and prediction. Electr Eng (2024). https://doi.org/10.1007/s00202-024-02411-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00202-024-02411-x