
Abstract
Desert ants that forage solitarily continually update their position relative to the nest through path integration. This is accomplished by combining information from their celestial compass and pedometer. The path integration system can adapt when memories of previous inbound routes do not coincide with the outbound route, through vector calibration. Here, we test the speed and limit of vector calibration in the desert ant Melophorus bagoti by creating directional conflicts between the inbound and outbound routes (45°, 90°, 135°, 180°). The homeward vector appears to calibrate rapidly after training with shifts occurring after three foraging trips, yet the limit of the vector’s plasticity appears to be a maximum of 45°. At 45° conflicts, the vector calibrates the full 45°, suggesting dominance of the previous inbound memories over the outbound cues of the current trip. Yet at larger directional conflicts, vector shifts after training diminish, with foragers in the 90° and 135° conditions showing smaller intermediate shifts between the inbound memories and the current outbound vector. When the conflict is at its maximum (180°), foragers show no calibration, suggesting the outbound vector is dominant. Panorama exposure during training appears to aid foragers orienting to the true nest, but this also appears limited to about a 45° shift and does not improve with training.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Solitary foraging ants continually update their current position relative to their nest, termed their vector, via path integration (Collett and Collett 2000b; Wehner 2003; Wehner 2008). Path integration combines two mechanisms, which together create the vector (Wehner 1994; Wittlinger et al. 2007). The first is a distance estimate, calculated primarily through a pedometer (Wittlinger et al. 2007). The second is a celestial compass and is dependent chiefly on the pattern of polarized light in the sky (Wehner 1994; Wehner and Müller 2006; Cheng and Freas 2015). Ants sense these celestial cues through the dorsal rim area of their eyes, which is sensitive to UV light (Fent 1986; Labhart and Meyer 1999; Zeil et al. 2014; Narendra et al. 2016). Using path integration, foragers can return to the nest along the shortest route despite a meandering outbound search for food. Foragers retain memories of these vectors for subsequent foraging trips where outbound foragers at the nest can use the 180° mirror of the inbound vector to return to profitable spatial locations (Collett et al. 1999; Collett and Collett 2000b).
Path integration is susceptible to the accumulation of error, meaning that the vector will only direct a returning forager to the general area of the nest (Wehner and Wehner 1986). This imprecision necessitates the use of corrective mechanisms to reach the exact nest location. These mechanisms can include learned panorama cues when they are present (Collett 1992; Wehner et al. 1996; Narendra et al. 2007b; Schultheiss et al. 2016; Freas et al. 2017b), systematic search (Wehner and Srinivasan 1981; Müller and Wehner 1994; Wehner 2003; Narendra 2007; Schultheiss and Cheng 2011), olfactory cues (Buehlmann et al. 2015), and vector calibration (Collett et al. 1999; Wehner et al. 2002).
Vector calibration occurs when the outbound and inbound vectors do not coincide, resulting in a non-zero value when the forager reaches the nest. The disagreement between the inbound and outbound vectors during previous foraging trips can cause foragers to alter their subsequent inbound and outbound route directions toward the vector memory of previous trips’ inbound routes (Collett et al. 1999; Collett and Collett 2000a; Wehner et al. 2002). In Cataglyphis fortis, a desert ant species navigating with few available visual panorama cues, foragers were shown to rapidly calibrate their vector directions in response to vector conflicts in the inbound and outbound route, shifting subsequent foraging directions to align with the previous trips’ inbound routes. Yet, vector calibration in this species did not result in full shifts to the inbound direction but instead suggested an intermediate direction between the two routes. These individuals were tested with directional conflicts under 90°, so that the extent of the vector’s directional calibration remains unknown (Collett et al. 1999; Wehner et al. 2002). Furthermore, the barren landscape C. fortis inhabits means it may only rely on systematic search to find the nest after displacement off-route (Wehner et al. 2002). Therefore, it is currently unknown what role the availability of the visual panorama may play in vector calibration when the panorama aligns with the inbound vector of previous trips and conflicts with their current outbound vector.
Here, we study vector calibration in the Australian desert ant, Melophorus bagoti, which lives in a landmark rich environment, and relies both on the surrounding panorama and path integration to navigate (Narendra et al. 2007a, b; Graham and Cheng 2009; Cheng et al. 2009; Legge et al. 2014). Only one study (Freas and Cheng 2017) has explored vector recalibration in M. bagoti and these experiments only tested foragers with no accumulated outbound vector with a 180° conflict, resulting in no observable vector calibration. In the current study, foragers were trained and tested by displacing individuals off their outbound foraging route by 45°, 90°, 135°, or 180° on every successful foraging trip. Foragers were collected and tested on their first visit to a feeder before displacement training and then at regular training intervals, within an arena representing an unfamiliar, uniform skyline. This arena forced individuals to use celestial cues to orient, allowing us to examine the magnitude and speed of their vector calibration after displacement training. Additionally, we recorded forager headings at the displacement sites to explore how the added presence of the panorama may alter inbound headings of foragers with conflicting outbound and inbound vectors.
Methods
Field site and subjects
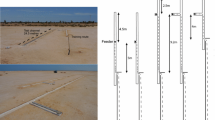
Experiments were conducted at a field site (Fig. 1) located 10 km south of Alice Springs, Northern Territory, Australia (23°45′28.12″S, 133°52′59.77″E). The study site consists of semi-arid desert populated primarily with buffel grass (Centhrus ciliaris), and scattered Eucalyptus trees and Acacia bushes (Muser et al. 2005). Experiments were conducted in February and March 2017, during the Australian summer. The current study focused on foragers of M. bagoti, a species of desert ant, which acts as a diurnal scavenger and, therefore, is active during the hottest parts of the day, collecting dead insects (Wehner 1987; Christian and Morton 1992).
Experimental set-up
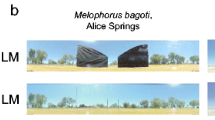
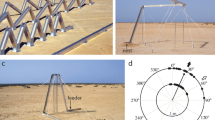
4 m from the nest entrance (Fig. s1a), a plastic feeder (15 × 15 × 9 cm) was dug into the ground (Figs. 2, Fig. s1b). The feeder was stocked with crushed cookie (Arnott™) pieces and cut-up pieces of mealworms. Foragers that fell into the feeder were unable to escape without being removed manually. A training corridor was erected around the nest and feeder using 10 cm tall plastic similar to the feeder walls. This corridor was 75 cm wide and 4.5 m in length. The lack of natural food within the corridor encouraged foragers to return to the feeder continuously for food. On the outer side of the corridor, a dirt ramp was erected, allowing one-way movement back to the nest entrance from the displacement sites (Fig. 2). All vegetation was cleared in a 4.3 m radius semi-circle around the nest entrance and four displacement sites, each 4 m from the nest entrance and 45°, 90°, 135° and 180° clockwise from the feeder were marked using metal pegs (Fig. 2). 20–30 cm beyond the displacement sites, the ground remained uncleared and was populated with grass tussocks and brush. In the nest-feeder direction 15 m from the nest, we constructed a 1 m diameter, 60 cm high uniform arena. This arena was made out of black plastic and blocked the entire surrounding natural panorama, forcing foragers to orient using vector cues. Initial headings in this arena were recorded through direct observation, randomising the observer’s location with each release.

Overhead (Google Earth, 2016) image of the nest location and surrounding field site, located 10 km south of Alice Springs, Northern Territory, Australia. Reference: Google Earth 9.8.2017. Centre for Appropriate Technology Campus. 23°45'29.68"S,133°53'00.31"E, elevation ~555m

Diagrams of the displacement training set-up. a Diagram showing the outbound and inbound route distances and angles. b Diagram of the training corridor and the surrounding area which was cleared of natural brush in a ~ 5 m radius semi-circle around the nest
45° calibration tests
The 45° condition tested foragers with similar vector discrepancies tested in C. fortis where paths differed by 55° (Wehner et al. 2002). On a forager’s first trip to the feeder, it was collected and individually marked by placing a small amount of acrylic paint (Tamiya™) on the abdomen. It was then allowed to gather a piece of food. Foragers were collected from the feeder using a darkened plastic vial and transferred to the uniform arena. Within the testing arena foragers were released onto a wooden board with a goniometer drawn on the surface. The goniometer consisted of a 60 cm diameter circle divided into 15° wedges, and initial headings of individual foragers were measured by recording the sector number of forager crossings at 30 cm. After arena testing, foragers were re-collected in the darkened vial and transferred to the displacement site 45° off-route from the nest-feeder route (Fig. 2; Fig. s1c). At the displacement site, foragers were released and tested at the site on an identical goniometer, and after running off this goniometer, foragers were allowed to return to the nest naturally. On each subsequent return trip to the feeder, foragers were displaced in a darkened vial to the 45° displacement site (Fig. 1) and allowed to return home, resulting in every successful foraging trip having distinct and conflicting outbound and inbound routes. After 3, 5, and 10 trips with this setup, foragers were again tested within the uniform arena before displacement, and after 10 trips foragers were also tested on the goniometer at the displacement site.
90°, 135°, and 180° calibration tests
Identical to the previous, 45° condition, on Trip 1 foragers were marked and tested on the goniometer within the uniform arena before training and then randomly assigned one of three displacement sites (90°, 135°, and 180°) off the homeward route (Fig. 2; Fig. s1d–f). After the 3rd, 5th, 10th, 15th, 20th, and 25th displacements, foragers were tested within the uniform arena before displacement and after the 10th and 25th trips foragers were tested at the displacement site. All individuals completed at least 10 training trips. As a forager may only make a few training trips a day and mean life span above ground is 4.9 days (Muser et al. 2005), we experienced forager attrition over the longer training regimens (25th trip survivorship 90°, 46.9%; 135°, 56.3%; 180°, 78.1%).
Statistical analysis
Data were analyzed with circular statistics (Batschelet 1981; Zar 1998) with Oriana Version 4 (Kovach Computing Services, UK). Rayleigh’s Tests were used to determine if data met the conditions of a uniform distribution (p > 0.05). V tests, with alpha set at p = 0.05, and the mean vector’s 95% confidence interval (95% CI) were used to determine if initial orientations were oriented to the outbound or inbound vector direction. Paired Watson and Wheeler F tests were used to compare mean vectors between pre-training orientations and each testing condition. To test if the observed shifts were compromise directions or complete shifts to the inbound vector, we rotated the pre-training orientations by condition, + 45° + 90° + 135° or + 180° and compared these orientations to the post training testing conditions using paired Watson and Wheeler F tests. We used the Holm-Bonferroni sequential method (Holm 1979) to correct for multiple paired Watson and Wheeler F tests. In the 180° condition, calibration could result in individual directional shifts in either direction. These changes may not be detectable when comparing mean vectors but could manifest as increases in variance. We compared these variance levels between the pre and post training conditions in the 180° condition using a Var test (Wystrach et al. 2014). In the Var test, absolute differences from the mean vector were calculated for both the pre and post training conditions and then compared using a two-tailed non-parametric Wilcoxon rank sum test.
Results
Pre-training arena tests
Initial orientations of pre-training foragers tested within the uniform arena were significantly non-uniform and directed to the accumulated outbound vector at 0° in all conditions (Table 1; Figs. 2a, 3a, h, o).

Circular histograms of initial headings in the 45° arena tests. The current accumulated vector direction for all conditions is marked by a black triangle at 0°. The inbound route after displacement is marked by an open triangle at 45°. All initial orientations were taken at 30 cm from release. The arrow in each histogram denotes the length of the mean vector and the direction of the average orientation of the condition. a On their first trip, foragers were collected from the feeder, transferred to the uniform arena and tested on a goniometer. After testing they were released at the 45° displacement site. After b 3, c 5, and d 10 displacements to the 45° site, foragers were collected from the feeder, transferred to the uniform arena and tested on a goniometer. n number of individuals, μ mean vector, r length of the mean vector
45° arena tests
In the 45° displacement testing in the uniform arena, foragers remained oriented across all conditions (Table 1). After three displacements, forager’s orientations shifted significantly away from the outbound vector (mean ± s.e.m = 21.97 ± 14.06°; Tables 1, 2; Fig. 3b) and represented a compromise direction between the current outbound trip and previous inbound trips (Table 2). After five trips, forager’s orientations had shifted away from the pre-training vector (mean ± s.e.m = 38.88 ± 10.51°; Table 2; Fig. 3c). This shift was complete to the inbound vector direction (Table 2). This pattern continued with arena testing after 10 displacements (mean ± s.e.m = 48.76 ± 6.43°; Table 1; Fig. 3d) as orientations were shifted significantly away from the outbound vector and toward the inbound vector (Table 2).
90° and 135° arena tests
During the 90° and 135° displacement testing in the uniform arena, after three displacements forager orientations were shifted away from the pre-training headings (Tables 1, 2; Fig. 4b, i) in the direction of the inbound route (mean ± s.e.m, 90° θ = 15.10 ± 12.32° and 135° θ = 16.55 ± 12.52°, respectively). These shifts were incomplete, as each condition’s mean vector significantly differed from both the outbound and inbound vector route (Table 2). This trend continued in subsequent tests. After 5, 10, 15, 20, and 25 trips in the 90° and 135° displacement conditions, forager orientation was shifted significantly way from the outbound route (Tables 1, 2; Fig. 4c–g, j–n). These shifts remained incomplete, as mean vectors in both 90° and 135° conditions significantly differed from the inbound route across all tests (Table 2). These orientations remained compromise directions as the mean vector directions significantly differed from the inbound vector (Table 1).

Circular histograms of initial headings in the 90°, 135°, and 180° arena tests. The current accumulated vector direction for all conditions is marked by a black triangle at 0°. The inbound route after displacement is marked by an open triangle. All orientations were recorded at 30 cm from release. The arrow in each histogram denotes the length of the mean vector and the direction of the average orientation of the condition. Foragers in the a–g 90°, h–n 135° and o–u 180° conditions were collected from the feeder and tested within the uniform arena on their first foraging trip, and after 3, 5, 10, 15, 20, or 25 training displacements. n number of individuals, μ mean vector, r length of the mean vector
180° arena tests
In the 180° condition, initial orientations in the arena did not change after training. Forager remained oriented toward the outbound vector direction at 0° (Table 1; Fig. 4p–u). The mean vector of these orientations did not significantly differ from that of pre-training orientations (Table 2). Additionally, the variance of these orientations did not increase significantly after training (Var test; 3rd trip, Z = 0.6077, p = 0.542; 5th trip, Z = 1.318, p = 0.187; 10th trip, Z = 1.533, p = 0.126; 15th trip, Z = 0.178, p = 0.859; 20th trip, Z = 0.579, p = 0.562; 25th trip, Z = 0.461, p = 0.645).
Displacement site tests
In the 45° displacement site testing, when foragers were released (Fig. 2) they oriented in a direction (mean ± s.e.m = 33.70 ± 7.54°) between the true nest direction at 45° and the vector direction at 0° and both the true nest and vector directions fell outside the 95% CI (Table 1; Fig. 5a). After ten training trips, foragers were oriented (mean ± s.e.m = 47.56 ± 12.07°) toward the true nest site at 45°, (Table 1) but this shift to the true nest direction after training was not significant when the mean vectors of both the pre and post training conditions were compared (Table 2; Fig.5b).

Circular histograms of initial headings at the 45°, 90°, 135°, and 180° displacement site tests. The current accumulated vector direction for all conditions is marked by a black triangle at 0°. The true nest direction is marked by an open triangle and all orientations were recorded at 30 cm from release. The arrow in each histogram denotes the length of the mean vector and the direction of the average orientation of the condition. After testing in the uniform arena, 45° condition foragers were collected and released on a goniometer at the 45° displacement site, on their a 1st displacement, and after their b 10th displacement. In the c–e 90°, f–h 135°, and i–k 180° condition, foragers were collected in the arena and tested at the respective displacement site on their 1st displacement and after their 10th and 25th displacement; μ mean vector; r length of the mean vector
In the 90° and 135° displacement site testing, when foragers were released on the first displacement trip at the 90° or 135° site (Fig. 2) they oriented in a compromise direction between the true nest and the vector direction with both falling outside the 95% CI (30.972° and 33.847°, respectively; Table 1; Fig.5c, f). Observations suggest foragers on their first trip appeared unsure of how to navigate home, resulting in long inbound paths that resembled searching behavior. Orientations at the displacement site did not shift significantly on training trips 10 and 25 (Table 2; Fig. 5d, e, g, h), but observations of experienced foragers’ inbound routes after the initial orientation suggest the formation of a homeward route that initially bowed out in the direction of the vector and then arched back toward the nest entrance.
In the 180° displacement site testing, when these foragers were released on the first displacement trip (Fig. 2) they oriented to the vector cues at 0° and not to the true nest at 180° (Table 1; Fig. 5i). Foragers traveled off the goniometer and into the brush beyond the training area. Foragers’ observed homeward routes were indicative of search behavior. These orientations did not shift significantly after training on trips 10 and 25 (Table 2; Fig.5j, k), with foragers still oriented to the vector direction and not to the true nest (Table 1). Observations of foragers suggested they did not develop efficient homeward routes, as most individuals still headed into the brush before returning past the release site and to the nest.
Arena tests vs. displacement site tests
In the 45°, 90° and 135° conditions on Trip 1, the mean vector of forager orientations within the uniform arena differed significantly from orientations when tested at the displacement site (Watson and Wheeler F test; 45°, F = 26.72, p < 0.001; 90°, F = 55.20, p < 0.001; 135°, F = 24.09, p < 0.001). By Trip 10, the mean vector of orientations in the arena did not significantly differ from orientations at the displacement site (Watson and Wheeler F test; 45°, F = 0.07, p = 0.78; 90°, F = 0.05, p = 0.83; 135°, F = 1.83, p = 0.18). In the 180° condition the mean vector of forager orientations within the uniform arena did not differ significantly from orientations when tested at the displacement site on Trip 1 or Trip 10 (Watson and Wheeler F test; Trip 1, F = 0.96, p = 0.33; Trip 10, F = 0.99, p = 0.32).
Discussion
All displacement conditions taken together suggest that 45° represents the upper limit of the vector calibration in M. bagoti under our testing conditions. Furthermore, cue weighting of the inbound vector, outbound vector, and panorama cues appears to change as directional conflicts increase. At 45°, the stored inbound cues seem to dominate, with foragers showing full shifts to this direction in both the arena and at the displacement site. As conflicts increase, at 90° and 135°, the current outbound vector appears to be weighted more heavily compared to the inbound vector, as observed shifts decrease numerically and represent only 37.2 and 19.2% of the conflict, respectively, after 25 trips. These compromises were also evident at the displacement site. Unlike orientation testing within the uniform arena, at the displacement site foragers were also exposed to the presence of the panorama at the displacement site supporting the inbound vector direction. At the largest vector conflict, 180°, the current outbound vector appears to fully overpower the stored inbound vector, resulting in no vector calibration. Even with the presence of the visual panorama at the displacement site, the outbound vector still dominated.

Comparing vector calibration rates by trip number in Cataglyphis fortis with a 55º conflict (Wehner et al. 2002) and all Melophorus bagoti conditions in the uniform arena. Diagraph depicts the angular deviation from the outbound vector direction (0º) at each recorded trip. Due to experimental differences between C. fortis and M. bagoti studies, inferential statistical comparisons would be inappropriate, but the data suggest that asymptotic calibration of the vector has been reached by Trip 10 in both species
The full shifts to the inbound direction in the 45° condition do not align with similar tests in C. fortis (Collett et al. 1999; Wehner et al. 2002), where displacement training never resulted in complete shifts to the inbound vector, and C. fortis foragers oriented in compromise directions between the inbound and outbound vectors. While the rate of calibration between C. fortis and M. bagoti appears similar, reaching asymptotic calibration by Trip 10, the calibration magnitudes remain larger in M. bagoti (Wehner et al. 2002; Fig. 6). This difference may be due to disparities in the availability of panorama cues between these two species. C. fortis inhabits barren landscapes largely devoid of panorama cues, and returning foragers can only rely on their vector and the back up mechanism of systematic search to return home (Wehner and Srinivasan 1981; Müller and Wehner 1994). Use of both the outbound vector and systematic search are present in Wehner et al. (2002), as foragers at the displacement site show small shifts (~ 30%) in initial heading and appear to veer toward the nest as they move further from the displacement site. When paths differed by 55°, C. fortis foragers never developed succinct inbound routes and even after 50 displacements showed evidence of search behavior when returning to the nest. In contrast, M. bagoti foragers can rely on a wealth of terrestrial cues in order to locate the nest entrance after displacements off-route and these foragers do return directly to the nest when paths differed by 45°. Unlike C. fortis, on their first displacement, M. bagoti foragers compromised between the vector direction and the true nest direction, suggesting the visual panorama is competing with the vector cues and helping foragers navigate to the nest (Cheng et al. 2009). By ten exposures to this site, M. bagoti foragers become fully oriented to the true nest direction. Moreover, observations of their homeward routes suggest they are returning straight to the area around the nest and are not engaging in directed search behavior such as C. fortis (Wehner et al. 2002). These straight homeward routes point to the panorama, available during training, as a potential cause of the full shifts to the inbound vector we observed in M. bagoti. Additionally, the panorama along the inbound route at the 45° site would closely resemble that of the outbound route to the feeder, which may reinforce inbound vector memory on subsequent trips, resulting in larger shifts in the arena testing. The importance of terrestrial panorama cues for vector calibration has been previously shown in honeybees, with the presence of panorama cues during the inbound or outbound route biasing the path integrator in that direction (Otto 1959; Collett and Collett 2000a).
The distinctions between C. fortis (Collett et al. 1999; Wehner et al. 2002) and M. bagoti in the current study may, however, have several origins. As discussed, the observed differences could be ontogenetic in origin: the presence of panorama cues during training could facilitate full shifts to the inbound direction (Bühlmann et al. 2011). But there could also be phylogenetic differences in these distantly related species that underlie these disparities in vector calibration. To further tease apart these potential underlying factors, the desert ant Cataglyphis velox would be a prime candidate for study, as it is a species closely related to C. fortis that yet inhabits cluttered environments such as M. bagoti (Mangan and Webb 2012).
In the 90° and 135° arena tests, M. bagoti foragers showed the same rapid shift toward the inbound vector after three training trips as in the 45° condition. Yet over larger conflicts, orientation shifts remained incomplete even after 25 displacements and more closely resembled the incomplete shift directions witnessed in C. fortis (Collett et al. 1999; Wehner et al. 2002). In both the 90° and 135° conditions, forager orientations never reached the shifts in the 45° condition and were numerically smaller in magnitude despite the larger conflict. The observed decreases in vector calibration may be explained by the panorama cues along the inbound routes at the 90° and 135° sites (along with the 180° site) during training, which would less resemble the foragers’ outbound trip and potentially result in less inbound vector reinforcement compared to the 45° displacement condition.
When tested at the displacement site, the results of Trip 1 of the 135° displacement condition resemble the results of a previous M. bagoti study (Legge et al. 2014) where foragers were trained to travel to a feeder and then displaced with conflicting vector and panorama cues (135°). Foragers also oriented in an intermediate direction between the cue sets, though interestingly, foragers in Legge et al. (2014) oriented closer to the direction indicated by the panorama cues (at 135°) compared to the current study (~ 68° vs. ~ 33°). This difference is likely due to differences in panorama cues around each nest, although these studies also trained and displaced individuals over different distances, which might also account for the observed differences.
As M. bagoti relies more on panorama based directional cues compared to C. fortis, a more fitting comparison on cue conflict may be with other solitary foraging ants that live in landmark rich environments. Similar cue conflict tests have been conducted on the nocturnally foraging Myrmecia midas and Myrmecia pyriformis along with the diurnal Myrmecia croslandi (Narendra et al. 2013a, b; Freas et al. 2017b, c). Unlike M. bagoti, M. croslandi and M. midas foragers displaced off-route with 90° cue conflicts orient in the true nest direction dictated by the panorama, though some M. croslandi foragers showed evidence of initially choosing a compromise direction between the vector and the panorama direction before shifting to solely panorama guidance (Narendra et al. 2013a; Freas et al. 2017b). M. pyriformis foragers displaced off-route with a 60° cue conflict chose either the panorama or vector direction when orienting and did not compromise (Narendra et al. 2013b). Disparities in cue use could be rooted in differences in phylogeny, landscape makeup, light level variation, or foragers’ level of experience along the foraging route.
The observed decrease in vector calibration at larger directional conflicts may be the result of the conflict magnitude itself. Similar navigational conflicts have been tested in rodents between a recently accumulated vector and a learned landmark cue. Over small directional conflicts, hamsters (Etienne et al. 1990) chose long-term landmark memories over their current short-term vector memory, similar to the preference we see in the condition with 45° conflicts with the long-term vector memory of previous trips overriding the current outbound vector. Yet this memory weighting changes as conflict size increases and at the largest conflict (180°), hamsters tended to ignore the long-term landmark memories, and showed a greater reliance on their current vector to return to the nest (Etienne et al. 1990; Etienee et al. 1996). These results are similar to those found in our current study, in which the same trends turn up both in the arena (long-term vector memory vs. short-term vector memory) and at the displacement site (long-term vector memory + long-term panorama memory vs. short-term vector memory). This suggests there may be some limit to the cue conflict size beyond which individuals switch from preferring the use of learned cues such as the panorama or stored inbound vectors, to their current vector.
Given the forager orientations at the displacement site, it is also possible that panorama cues present during training influence inbound vector cue strength. When trained at 90° and 135°, the foragers’ observed bowing routes may have a self-reinforcing property. When the ants follow a bowed path and find their way home, they are rewarded, as we assume that finding home has reinforcing properties. Learning principles then suggest that the homing ant is more likely to repeat the bowed path once more on the next trip, that is, in the same context. Given that such a path once again takes the ant home, the path is reinforced once more, making it even more likely on the next trip. Such a positive feedback loop cements a less than fully efficient path that nevertheless gets the navigator home reliably. Once the forager experiences this path and reaches the nest, it becomes the most memorable and salient route. This would cause foragers to continue to use this route on subsequent trips. When comparing the mean vector of foragers’ orientations at the displacement site tests with orientations in the arena tests, we found no difference on Trip 10. These results suggest the headings in displacement site and arena tests are the same after calibration. It appears that once the calibration reaches its asymptote, the availability of the panorama during displacement tests does not add much to the shift toward the inbound route.
M. bagoti is known for developing one-way routes that bend and curve around obstacles that are common in its cluttered environment (Kohler and Wehner 2005; Wehner et al. 2006; Cheng et al. 2009). Therefore, these curved homeward routes during training may reinforce the compromise orientations. At 180°, the initial movement toward the outbound vector and the inability of foragers to learn to ignore the vector in favor of the panorama cues initially may result in the stored inbound vector being weak and steadily overpowered by the outbound vector cue in subsequent arena tests. It would be interesting to collect and examine these inbound routes from all of these displacement sites, but this effort must await a warranted future study.
Conclusions
M. bagoti foragers exhibit vector calibration when their inbound and outbound foraging routes differ. These changes occur rapidly but appear to have an upward limit of ~ 45°. These results suggest the strength of the previous inbound and current outbound vector cues change as the conflict between them increases. Over smaller directional conflicts, the inbound vector memory of previous trips dominates. Yet as the conflict increases, the current outbound vector becomes preferred to where at the largest conflict (180°) it completely dominates the inbound vector memory. Exposure to the surrounding panorama cues appears to aid foragers returning home, even on the first displacement. Yet we see the same trends in orientation at the displacement site as we do in the arena with heavier weighting of the current outbound vector as directional conflicts increase.
References
Batschelet E (1981) Circular Statistics in Biology. New York: Academic Press
Bregy P, Sommer S, Wehner R (2008) Nest-mark orientation versus vector navigation in desert ants. J Exp Biol 211:1868–1873
Bühlmann C, Cheng K, Wehner R (2011) Vector-based and landmark-guided navigation in desert ants inhabiting landmark-free and landmark-rich environments. J Exp Biol 214:2845–2853
Buehlmann C, Graham P, Hansson BS, Knaden M (2015) Desert ants use olfactory scenes for navigation. Anim Behav 106:99–105
Cheng K, Freas CA (2015) Path integration, views, search, and matched filters: the contributions of Rüdiger Wehner to the study of orientation and navigation. J Comp Physiol A 201(6):517–532
Cheng K, Narendra A, Sommer S, Wehner R (2009) Traveling in clutter: navigation in the central Australian ant Melophorus bagoti. Behav Process 80:261–268
Cheng K, Schultheiss P, Schwarz S, Wystrach A, Wehner R (2014) Beginnings of a synthetic approach to desert ant navigation. Behav Processes 102:51–61
Christian KA, Morton SR (1992) Extreme thermophilia in a Central Australian ant, Melophorus bagoti. Physiol Zool 65:885–905
Collett TS (1992) Landmark learning and guidance in insects. Philos Trans R Soc Lond B Biol Sci 337:295–303. https://doi.org/10.1098/rstb.1992.0107
Collett M, Collett TS (2000a) How do insects use path integration for their navigation? Biol Cyber 83(3):245–259
Collett TS, Collett M (2000b) Path integration in insects. Curr Opin Neurobiol 10:757–762
Collett M, Collett TS, Wehner R (1999) Calibration of vector navigation in desert ants. Curr Biol 9:1031–1034
Etienne AS, Teroni V, Hurni C, Portenier V (1990) The effect of a single light cue on homing behaviour of the golden hamster. Anim Behav 39:17–41
Etienne AS, Maurer R, Seguinot V (1996) Path intergration in mammals and its interaction with visual landmarks. J Exp Biol 199:201–209
Fent K (1986) Polarised skylight orientation in the desert ant Cataglyphis. J Comp Physiol A 158:145–150
Freas CA, Cheng K (2017) Learning and time-dependent cue choice in the desert ant Melophorus bagoti. Ethology 123:503–515. https://doi.org/10.1111/eth.12626
Freas CA, Whyte C, Cheng K (2017a) Skyline retention and retroactive interference in the navigating Australian desert ant, Melophorus bagoti. J Comp Physiol A 203:353. https://doi.org/10.1007/s00359-017-1174-8
Freas CA, Narendra A, Cheng K (2017b) Compass cues used by a nocturnal bull ant, Myrmecia midas. J Exp Biol 220:1578–1585. https://doi.org/10.1242/jeb.152967
Freas CA, Narendra A, Lemesle C, Cheng K (2017c) Polarized light use in the nocturnal bull ant, Myrmecia midas. R Soc Open Sci 4(8):170598
Graham P, Cheng K (2009) Which portion of the natural panorama is used for view-based navigation in the Australian desert ant? J Comp Physiol A 195:681–689
Holm S (1979) A simple sequential rejective method procedure. Scand J Stat 6:65–70
Kohler M, Wehner R (2005) Idiosyncratic route memories in desert ants, Melophorus bagoti: How do they interact with path-integration vectors? Neurobiol Learn Mem 83:1–12
Labhart T, Meyer EP (1999) Detectors for polarized skylight in insects: a survey of ommatidial specializations in the dorsal rim area of the compound eye. Microsc Res Tech 47:368–379
Legge ELG, Wystrach A, Spetch ML, Cheng K (2014) Combining sky and Earth: desert ants (Melophorus bagoti) show weighted integration of celestial and terrestrial cues. J Exp Biol 217:4159–4166
Mangan M, Webb B (2012) Spontaneous formation of multiple routes in individual desert ants (Cataglyphis velox). Behav Ecol 23:944–954. https://doi.org/10.1093/beheco/ars051
Mittelstaedt H (1983) The role of multimodal convergence in homing by path integration. Fortschr Zool 28:197–212
Müller M, Wehner R (1994) The hidden spiral: systematic search and path integration in desert ants, Cataglyphis fortis. J Comp Phys A 175:525–530
Muser B, Sommer S, Wolf H, Wehner R (2005) Foraging ecology of the thermophilic Australian desert ant, Melophorus bagoti. Aust J Zool 53:301–311
Narendra A (2007) Homing strategies of the Australian desert ant Melophorus bagoti II. Interaction of the path integrator with visual cue information. J Exp Biol 210:1804–1812
Narendra A, Cheng K, Wehner R (2007a) Acquiring, retaining and integrating memories of the outbound distance in the Australian desert ant Melophorus bagoti. J Exp Biol 210:570–577
Narendra A, Si A, Sulikowski D, Cheng K (2007b) Learning, retention and coding of nest-associated visual cues by the Australian desert ant, Melophorus bagoti. Behav Ecol Sociobiol 61:1543–1553
Narendra A, Gourmaud S, Zeil J (2013a) Mapping the navigational knowledge of individually foraging ants, Myrmecia croslandi. Proc R Soc B 280:20130683
Narendra A, Reid SF, Raderschall CA (2013b) Navigational efficiency of nocturnal Myrmecia ants suffers at low light levels. PLoS One 8:e58801
Narendra A, Ramirez-Esquivel F, Ribi WA (2016) Compound eye and ocellar structure for walking and flying modes of locomotion in the Australian ant, Camponotus consobrinus. Sci Rep 6:22331
Otto F (1959) Die Bedeutung des Rückfluges für die Richtings – und Entfernungsangabe der Bienen. Z Vergl Physiol 42:303–333
Schultheiss P, Cheng K (2011) Finding the nest: inbound searching behaviour in the Australian desert ant, Melophorus bagoti. Anim Behav 81:1031–1038
Schultheiss P, Wystrach A, Scwarz S, Tack A, Delor J, Nooten SS, Bibost AL, Freas CA, Cheng K (2016) Crucial role of ultraviolet light for desert ants in determining direction from the terrestrial panorama. Anim Behav 115:19–28
Schwarz S, Cheng K (2010) Visual associative learning in two desert ant species. Behav Ecol Sociobiol 64:2033–2041
Wehner R (1987) Spatial organization of the foraging behavior in individually searching desert ants, Cataglyphis (Sahara desert) and Ocymyrmex (Namib desert). In: Pasteels JM, Deneubourg JM (eds) From individual to collective behavior in insects. Birkhäuser, Basel, pp 15–42
Wehner R (1994) The polarization-vision project: championing organismic biology. In: Schildberger K, Elsner N (eds) Neural basis of behavioural adaptation. Fischer, Stuttgart, pp 103–143
Wehner R (2003) Desert ant navigation: how miniature brains solve complex tasks. J Comp Physiol A 189:579–588
Wehner R (2008) The architecture of the desert ant’s navigational toolkit (Hymenoptera: Formicidae). Myrmecol News 12:85–96
Wehner R, Müller M (2006) The significance of direct sunlight and polarized skylight in the ant’s celestial system of navigation. Proc Natl Acad Sci USA 103:12575–12579
Wehner R, Räber F (1979) Visual spatial memory in desert ants, Cataglyphis bicolor (Hymenoptera: Formicidae). Experientia 35:1569–1571
Wehner R, Srinivasan MV (1981) Searching behaviour of desert ants, genus Cataglyphis (Formicidae, Hymenoptera). J Comp Physiol A 142:315–338
Wehner R, Wehner S (1986) Path integration in desert ants. Approaching a long-standing puzzle in insect navigation. Monit Zool Ital 20:309–331
Wehner R, Michel B, Antonsen P (1996) Visual navigation in insects: coupling of egocentric and geocentric information. J Exp Biol 199:129–140
Wehner R, Gallizzi K, Frei C, Vesely M (2002) Calibration processes in desert ant navigation: vector courses and systematic search. J Comp Physiol A 188:683–693
Wehner R, Boyer M, Loertscher F, Sommer S, Menzi U (2006) Ant navigation: one-way routes rather than maps. Curr Biol 16:75–79
Wittlinger M, Wehner R, Wolf H (2007) The desert ant odometer: a stride integrator that accounts for stride length and walking speed. J Exp Biol 210:198–207
Wystrach A, Schwarz S, Schultheiss P, Baniel A, Cheng K (2014) Multiple sources of celestial compass information in the central Australian desert ant Melophorus bagoti. J Comp Physiol A 200:1–11
Zar JH (1998) Biostatisical analysis, 4th edn. Engelwood Cliffs, New Jersey
Zeil J, Ribi WA, Narendra A (2014) Polarization vision in ants, bees and wasps. In: Horváth G (ed) Polarized light and polarization vision in animal sciences, 2nd edn. Springer, Berlin, pp 41–60
Acknowledgements
This research was supported by a Grant from the Australian Research Council (DP150101172) and many thanks to the Centre of Appropriate Technology for access to the field site and nests. The authors declare no conflict of interests in association with this work.
Author information
Authors and Affiliations
Contributions
Experiments conceived and designed: CAF. Data collection and analysis: CAF. Manuscript production and revision: CAF and KC.
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Freas, C.A., Cheng, K. Limits of vector calibration in the Australian desert ant, Melophorus bagoti . Insect. Soc. 65, 141–152 (2018). https://doi.org/10.1007/s00040-017-0595-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00040-017-0595-2