
Abstract
This work is concerned with a semilinear non-homogeneous Timoshenko system under the effect of two nonlinear localized frictional damping mechanisms. The main goal is to prove its uniform stability by imposing minimal amount of support for the damping and, as expected, without assuming any relation on the non-constant coefficients. This fact generalizes substantially the previous papers by Cavalcanti et al. (Z Angew Math Phys 65(6):1189–1206, 2014) and Santos et al. (Differ Integral Equ 27(1–2):1–26, 2014) at the levels of problem and method. It is worth mentioning that the methodologies of these latter cannot be applied to the semilinear case herein, namely when one considers the problem with nonlinear source terms. Thus, differently of Cavalcanti et al. (Z Angew Math Phys 65(6):1189–1206, 2014), Santos et al. (Differ Integral Equ 27(1–2):1–26, 2014), the proof of our main stability result relies on refined arguments of microlocal analysis due to Burq and Gérard (Contrôle Optimal des équations aux dérivées partielles, http://www.math.u-psud.fr/~burq/articles/coursX.pdf, 2001). As far as we know, it seems to be the first time that such a methodology has been employed to 1-D systems of Timoshenko type with nonlinear foundations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this work, we are going to address the following semilinear non-homogeneous Timoshenko system with localized damping
subject to initial-boundary conditions
where \( \Omega :=(0,L)\), with \(L>0\) denoting the beam length, \(\varphi =\varphi (x,t)\) and \(\psi =\psi (x,t)\) stand for transversal displacement and rotation angle of a filament of the beam, respectively, and
are non-constant positive coefficients whose physical meanings are well known; namely, \(\rho (x)\) is the mass density of the material, A(x) is the area of a cross section , I(x) is second moment of a cross section, \(k'\) is the shear factor coefficient, G is the shear modulus, and E is the modulus of elasticity.
The non-constant coefficients \(\rho _1(x), \rho _2(x), k(x)\) and b(x) are assumed to be smooth functions (\(C^\infty (\Omega )\)) and bounded from below and above by positive constants as well as their derivatives of first order; the localized damping coefficients \(\alpha _1(x)\) and \(\alpha _2(x)\) are supposed to be continuous and nonnegative functions in [0, L], while the nonlinear feedback functions \(g_1\) and \(g_2\) are continuous, monotone increasing and zero at the origin. The nonlinear foundations \(f_1\) and \(f_2\) are assumed to growth polynomially under suitable conditions. All the precise assumptions, as well as the well-posed result, will be stated in Sect. 2.
In what concerns the stabilization of the Timoshenko system with two internal frictional dissipations, there are some results related to variations of the above model (1.1)–(1.4) in the literature. Indeed, Raposo et al. [29] proved the exponential stability for a linear problem related to equations (1.1) and (1.2) with constant coefficients \(\rho _{1},\rho _{2},k,b,\alpha _1,\alpha _2>0\), null sources \(f_1=f_2=0\) and full linear damping \(g_1(\varphi _t)= \varphi _t\), \(g_2(\psi _t)=\psi _t\). In this occasion, since the problem is linear, it is used the semigroup theory to prove their stability result, see, e.g., [29, Theorem 3.1]. In 2014, both Cavalcanti et al. [8] and Santos et al. [30] considered equations (1.1) and (1.2) with constant coefficients \(\rho _{1},\rho _{2},k,b>0\), null sources \(f_1=f_2=0\) and two locally distributed nonlinear damping \(\alpha _1(x)g_1(\varphi _t)\) and \(\alpha _2(x)g_2(\psi _t)\). In both works [8, 30], it is proved that the stability of the corresponding energy is driven by a nonlinear ODE, see, for instance, [8, Theorem 3.1] and [30, Theorem 3.2]. To their proofs, keeping in mind that \(f_1=f_2=0\), it is employed the reduction principle [16] where the problem of decay rates with nonlinear damping is reduced to an appropriate stabilizability inequality for the linear system. In addition, stabilizability inequality for the linearly damped problem is achieved through an observability inequality obtained for the conservative system. Equivalence of these two observability inequalities owns its validity to the fact that the control action is bounded via locally distributed internal feedbacks. This allows the authors in [8] to engage the so called \( B^* L\) methodology presented in [25], whereas in [30] it is used contradiction arguments along with proper cut-off functions, once the observability inequality is obtained for the conservative system in both papers. More recently, Fatori et al. [19] and Ma et al. [27] have been considered problem (1.1)–(1.2) with constant coefficients \(\rho _{1},\rho _{2},k,b,\alpha _1,\alpha _2>0\), linear dissipations \(g_1(\varphi _t)= \varphi _t\) and \(g_2(\psi _t)=\psi _t\), and also nonlinear source and external terms \(f_1(\varphi ,\psi )-h_1\), \(f_2(\varphi ,\psi )-h_2\) in the place of \(f_1(\varphi )\), \(f_2(\psi )\), respectively. Since the damping in the latter is full and linear, the long-time behavior of their problems is mainly achieved by means of standard multipliers and perturbed energy, see, e.g., [19, Lemma 4.6] and [27, Lemma 3.4].
The above chronologically referred papers [8, 19, 27, 29, 30] lead us to the main goal of the present article; namely, our purpose is to obtain general and uniform decay rate estimates for the energy corresponding to the semilinear Timoshenko system (1.1)–(1.4) with minimal support for the damping. As expected, when dealing with damping mechanisms for both displacements of system (1.1)–(1.2), we do not need to assume any relation on the coefficients. This yields a substantial generalization of the works [8, 19, 27, 29, 30] at the levels of result and method. In fact, since \(f_1\ne 0\) and \(f_2\ne 0\), the aforementioned methodologies employed by [8, 29, 30] are no longer valid here. Also, once we are dealing with locally distributed nonlinear damping \(\alpha _1(x)g_1(\varphi _t)\) and \(\alpha _2(x)g_2(\psi _t)\), the multiplier technique explored in [19, 27] fails as well because of the terms in the energy estimates that cannot be directly absorbed (this is not the case when the damping functions are supported on the whole domain as, for example, in [19, 27, 29]). When \(f_1=f_2=0\), in order to overcome this latter situation, special cut-off functions can be introduced in order to eliminate undesirable terms of higher order as considered previously in the works [8, 30]. In addition, since the coefficients \(\rho _1(x), \rho _2(x), k(x)\) and b(x) may depend on the x-variable, a new method is required and, for this purpose, the microlocal analysis (see, for instance, [5, 6, 20, 21, 26] and references therein) seems to be a very useful tool to prove a desired nonlinear observability inequality to problem (1.1)-(1.4) and, consequently, uniform decay rates estimates for the corresponding energy.
It seems to be the first time that microlocal analysis is invoked to stabilize a semilinear Timoshenko system where other methods can not be applied at a first glance. The next table summarizes the new contribution of the present paper at the levels of generality of problem (1.1)-(1.4) and the methodology for stability, when compared with [8, 19, 27, 29, 30].
Summary of Timoshenko systems with fully internal frictional damping
Paper | Nonlinear sources | Variable coefficients | Localized damping coefficients | Nonlinear damping functions | Methodology |
|---|---|---|---|---|---|
Raposo et al. [29] | NO | NO | NO | NO | Linear Semigroup |
Cavalcanti et al. [8] | NO | NO | YES | YES | Observability, \( B^* L\) method |
Santos et al. [30] | NO | NO | YES | YES | Observability, cut-off mult. |
Fatori et al. [19] | YES | NO | NO | NO | Perturbed Energy |
Ma et al. [27] | YES | NO | NO | NO | Perturbed Energy |
Present Article | YES | YES | YES | YES | Observability, microlocal analysis |
In conclusion, our main goal in the present paper is to work in a more general situation than [8, 29, 30] and still considering the minimum amount of supported damping to approach the localized semilinear Timoshenko problem (1.1)–(1.4). To do so, we follow the same spirit of [8, 30] with the difference that here, for the first time, we are going to exploit the microlocal analysis for 1-D systems of Timoshenko type.
There is another scenario in Timoshenko systems involving partially damped problems. In this case, it is necessary to transfer dissipation from one displacement (equation) to another and, therefore, the uniform stability of the whole system will require an assumption on the coefficients usually called equal speeds of wave propagation. However, such types of partially damped systems represent a different situation and comparisons with them will not be given herein.
Our main results (Theorem 3.2 and Proposition 3.3) will be stated in Sect. 3, and their proofs will be given in Sect. 4 right after. In Sect. 5, we finish this paper with some remarks on the geodesics that can be built for the Timoshenko system.
2 Assumptions and well-posedness
Let us start by considering the following phase spaces
and
Under the assumptions on the functions \(\rho _{1},\rho _{2},b,k\), then \({\mathcal {H}}\) is a Hilbert space with norm given by
for all \((u,v,w,z)\in {\mathcal {H}},\) where \(\left\Vert \cdot \right\Vert \) stands for the usual \(L^2(\Omega )\)-norm.
Denoting by \(v=\varphi _t\), \(z=\psi _t\), \(U= (\varphi ,v,\psi ,z)\) and \(U_0=(\varphi _0,\varphi _1,\psi _0,\psi _1)\), then system (1.1)–(1.4) can be rewritten as follows
where the operators A, B and F are defined by
For the sake of completeness, we provide the notion of solutions for the Cauchy problem (2.1) according to Barbu [2]. This is already recalled for Timoshenko systems in [8, 30].
Definition 2.1
One says that \(U:[0,\infty [\rightarrow {\mathcal {H}}\) is a strong solution for (2.1) if U is continuous on \([0,\infty [\) and Lipschitz on every compact subset of \(]0,\infty [\), U(t) is differentiable a.e. on \(]0,\infty [\) and
Definition 2.2
One says that \(U:[0,\infty [\rightarrow {\mathcal {H}}\) is an integral solution for (2.1) if U is continuous on \([0,\infty [\), \(U(0)=U_0\) and the following inequality holds
for every \(\Psi \in D(A)\) and \(0\le s\le t<\infty \), where \((\cdot ,\cdot )_{\mathcal {H}}\) stands for the inner product of \({\mathcal {H}}\).
Now, we provide the assumptions on the localized damping coefficients, the dissipative feedback functions and the nonlinear source terms as follows.
Assumption 2.1
Let us consider nonnegative functions \(\alpha _1,\alpha _2\in C[0,L]\) such that
where \(I_1,I_2\) are open intervals contained in [0, L] satisfying \(\omega :=I_1\cap I_2\ne \emptyset \).
Assumption 2.2
In addition to Assumption 2.1, we suppose that \(\omega \) geometrically controls \(\Omega =(0,L)\), that is, there exists \(T_{0} >0\) such that every geodesic of the metric \(G_i(x)\), \(i=1,2\), where \(G_1=\left( \frac{k}{\rho _1}\right) ^{-1}\), \(G_2=\left( \frac{b}{\rho _2}\right) ^{-1}\), traveling with speed 1 and issued at \(t = 0\), enters the set \(\omega \) in a time \(t < T_{0}\).
Assumption 2.3
The functions \(g_1,g_2\) are continuous, monotone increasing and satisfy
for some positive constants \(k_i\) and \(K_i\), \(i=1,2.\)
Assumption 2.4
The nonlinear terms \(f_1,f_2 \in C^2({\mathbb {R}})\) satisfy
and their primitives \(F_i(s) = \int \limits _{0}^{s} f_i(\tau )d\tau \), \(i=1,2,\) verify
Assumption 2.5
For every \(T > 0\), the only solutions \((\eta , \xi )\) lying in the space \(C(]0,T[;\,{\mathcal {H}})\,\cap \,C(]0,T[;\,{\mathcal {V}}^\prime ),\) to system
where \(V_i(x,t)\in \,L^\infty (]0,T[;\,L^1((0,L)), i=1,2\) are the trivial solutions \((\eta ,\xi )=(0,0).\)
Under the above assumptions, we make some comments as follows.
Remark 2.1
(a) Assumptions 2.1 and 2.3 are motivated by [8, 30].
(b) Assumption 2.4 is relatively standard for perturbation of wave-like systems. In particular, from (2.8) and the mean value theorem, there exist constants \(C_i>0\) such that
(c) For \(V_i(x,t)\in \,L^\infty (]0,T[;\,L^n((0,L))\) Assumption 2.5 follows from the pioneer work of Ruiz [28]. According to Koch and Tataru [22] (see Theorem 8.15), in the more general case where \(V_i(x,t)\in \,L^{\frac{n+1}{2}}(]0,T[;\,L^{\frac{n+1}{2}}(0,L))\), the unique continuation result follows locally. Hence, under the conditions specified in [22], Assumption 2.5 is fulfilled.
(d) Assumption 2.2 is the so-called geometric control condition (G.C.C.) and it will be only used for the stability result. It is well-known that it is a necessary and sufficient for stabilization and control of the linear wave equation (see [1, 7, 10, 11, 18] and references therein). Since in the present paper we do not have any control of the geodesics because of the inhomogeneous medium, we assume that such an assumption must be considered, namely:
For all geodesic \(t\in I \mapsto x(t) \in \Omega \) of the metric \(G_1=\left( \frac{k}{\rho _1}\right) ^{-1}\) (or \(G_2=\left( \frac{b}{\rho _2}\right) ^{-1}\)), with \(0\in I\), there exists \(t\ge 0\) such that \(\alpha _1(x(t))>0\) (or \(\alpha _2(x(t))>0\)).
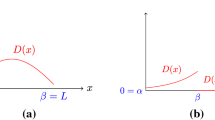
We also observe that if \(G_1(x)=G_2(x)=constant\), the above condition holds true, once the bicharacteristics \(t\mapsto \left( t, x(t), \tau , -\tau G(x(t)){\dot{x}}(t)\right) \) (or its projection on \(\Omega \times (0,T)\)) are straight lines. On the other hand, for a general metric the above condition cannot hold if, for instance, G admits trapped bicharacteristics. See Fig. 1.

At the left side the bicharacteristic (or its projection on \(\Omega \times (0,T)\)) is a straight line which enters the region \(\omega \times (0,T)\). At the right side it is illustrated a trapped bicharacteristic that does not reach the damped area \(\omega \times (0,T)\)
Under the above notations, assumptions and remarks, we are going to consider the existence and uniqueness result for the Cauchy problem (2.1), under the light of nonlinear semigroup method.
Theorem 2.3
Let us suppose that Assumptions 2.1, 2.3 and 2.4 hold. Then, if \(U_0 \in {\mathcal {H}}\), problem (2.1) has a unique integral solution. Moreover, if \(U_0\in {\mathcal {V}}\), the solution is strong one.
Proposition 2.4
Under the assumptions of Theorem 2.3, let us take \(U_0 \in {\mathcal {H}}\) and consider \(U\in C([0,\infty [;{\mathcal {H}})\) the respective unique integral solution of (2.1). Then, there exists a sequence of strong solutions \(U_n\) of (2.1) such that
Remark 2.2
To prove Theorem 2.3 and Proposition 2.4, we follow the same idea as presented in [8, 30], by including the nonlinear source terms whose Assumption 2.4 leads them to locally Lipschitz perturbations. Indeed, from the definitions of operators A and B in (2.2)–(2.3) and using Assumptions 2.1 and 2.3, it is not so difficult to prove that A and B satisfy the hypotheses of [4, Theorems 3.1]. See also [2, 3] for integral solutions. In addition, under Assumption 2.4 (see also (2.11)), one proves that operator F set in (2.4) is a locally Lipschitz perturbation (see Theorems 7.1 and 7.2 in [15]). Therefore, the existence and uniqueness of integral and strong solutions follow from the general theory given by [2,3,4] as well as the statement that every integral solution can be obtained as limit of strong solutions. Summarizing, problem (1.1)–(1.4) is well posed.
3 Asymptotic behavior: main results
3.1 Energy relation
We first introduce the energy functional associated to solutions of system (1.1)–(1.4) for all \(t\ge 0\), namely,
As a consequence of Assumptions 2.1, 2.3 and 2.4, one can conclude without difficulties that the energy (3.1) is a monotone non-increasing (and nonnegative) function, which is stated in the next result.
Lemma 3.1
Let \(U=(\varphi ,\varphi _t,\psi ,\psi _t)\) be an integral (or strong) solution of (1.1)–(1.4). Then, the energy satisfies
As a consequence, it follows that
Proof
Let us first consider a strong solution \(U=(\varphi ,\varphi _t,\psi ,\psi _t)\) of (1.1)–(1.4). Thus, multiplying (1.1) by \(\psi _t\), (1.2) by \(\varphi _{t}\), integrating by parts on \(\Omega \) and adding the resulting expressions, we easily get (3.2) and, consequently, (3.3) after integrating on (0, t). From this and Proposition 2.4, the conclusion also holds true for the integral solution. \(\square \)
3.2 Nonlinear ODE relation
Before stating our main result, let us first introduce a nonlinear ODE that shall drive the energy stability. Such a constructive methodology was firstly introduced by Lasiecka and Tataru [23] and, subsequently, by some authors. See, for instance, [9, 13, 14] for wave models and [8, 30] for the technique adapted to Timoshenko systems, from where we follow the same reasoning lines.
Assumption 2.3 allows us, according to [23] (see also [8, 9, 13, 14, 30]), to consider a function \(h:{\mathbb {R}}\rightarrow {\mathbb {R}}\) defined by
where \(h_1, h_2\) are continuous, concave, strictly increasing real functions satisfying
In this way, h has the same properties as its composing functions \(h_1\) and \(h_2\). In addition, we define the auxiliary function r by
and so it is not difficult to see that \(cI+r\) is invertible for any constant \(c\ge 0\), once r is a monotone increasing function. Thus, for nonnegative constants c and M we define
and observe that it is a continuous, positive and strictly increasing function with \(p(0)=0\). Keeping the above construction in mind, we finally define the nonlinear function
and introduce the ODE driven by q as follows
Under the above construction, and relying on the results of [23], if p satisfies \(p(s)>0\) for \(s>0\), then it possible to prove the following stabilization limit for S:
3.3 Main results
Under the above notations and previous hypotheses, we are now in position to state our main result on decay rates of the energy associated with problem (1.1)–(1.4). More precisely, we have:
Theorem 3.2
(Asymptotic Behavior) Let us suppose that Assumptions 2.1, 2.2, 2.3 and 2.4 hold and let \(K>0\) be any positive constant such that the initial energy \(E_U(0)\le K\). Then, there exists a time \(T_0>0\) such that
where S(t) is the solution of problem (3.7) with \(s_0=E_U(0)\) and \(\displaystyle \lim _{t\rightarrow \infty }S(t)=0\).
Remark 3.1
We observe that although the decay rate (3.8) depends on the size of the initial energy, there are several examples of functions \(g_i, i=1,2,\) satisfying Assumption 2.3. Consequently, there are several explicit decay rates to solutions S of (3.7) as well as to the energy \(E_U\) by means of the inequality (3.8), see, for instance, [13, Section 8] from where we can similarly achieve such concrete decay rates. See also [8, 16, 24, 30].
We mention that the approach to the proof of Theorem 3.2 is different from that presented in [8, 30]. Here, the guiding idea is the one presented in [12] adapted to the context of Timoshenko systems where to prove the stabilization (3.8) reduces itself to prove an observability inequality, whose proof is now based on contradiction arguments in combination with microlocal analysis, see, e.g., Burq and Gérard [6]. Such an idea has also been considered previously in [17, 18] for different models. The result on observability inequality associated with problem (1.1)-(1.4) reads as follows:
Proposition 3.3
(Observability Inequality) Under the assumptions of Theorem 3.2, there exist constants \(T_0>0\) and \(C=C(K,T)>0\) such that
for all \(T>T_0\).
The proofs of Proposition 3.3 and Theorem 3.2 are given in the next section.
4 Proofs
4.1 Proof of Proposition 3.3
Let us assume that (3.9) does not hold. Then, there exists \(T>0\) (large enough) and a sequence \(U^n=(\varphi ^n, \varphi _t^n, \psi ^n, \psi _t^n)\) of weak solutions of problem (1.1)–(1.4) in \((0,L)\times (0, T)\), that is,
such that \(E_{U^n}(0) \le K\) and
Thus, (4.2) yields
Now, we define:
From (4.1) and (4.4), we can consider the following sequence of normalized problems in \((0,L)\times (0, T)\):
with the same boundary conditions for \({\tilde{\varphi }}^n\) and \({\tilde{\psi }}^n.\) The functional energy associated with problem (4.5) is given by
for \(t\ge 0\). From (4.4), a straightforward computation shows that
which implies, in particular, that \(E_{{\tilde{U}} ^n}(0)=1\) for all \(n\in {\mathbb {N}}\). In order to achieve a contradiction, we are going to prove in what follows that \(E_{{\tilde{U}} ^n}(0)\) converges to zero as n goes to infinity.
Firstly, taking (4.3) and (4.4) into account we deduce
Further, from the boundedness \(E_{{\tilde{U}} ^n}(0)\le 1\) we also deduce, for an eventual subsequence of \(\{{\tilde{U}}^n\}\), that
We observe that \(\alpha _n\) is bounded and, in addition, that \(\alpha _n \rightarrow \alpha \in [0,K^{1/2}]\). We shall divide our proof in two cases: \(\alpha > 0\) or \(\alpha = 0\).
Case (i): \(\alpha > 0\). Passing to the limit in (4.5) and using (4.7) along with assumptions on \(g_i, \, i=1,2,\) we arrive at
and for \({\tilde{\varphi }}_{t}=\eta \) and \({\tilde{\psi }}_{t}=\zeta \), it holds in the distributional sense
By noting that \(f_1'(\alpha {\tilde{\varphi }}),~ f_2'(\alpha {\tilde{\psi }})\in L^\infty (\Omega \times (0,T))\), then from Assumption 2.5it results that \((\eta ,\zeta )=(0,0),\) which implies that \(({\tilde{\varphi }}_{t},{\tilde{\psi }}_t)=(0,0)\). Returning to (4.11), we infer
and since \(f_i(s) s\ge 0\) for \(i=1,2\), we obtain
from which we conclude that \(({\tilde{\varphi }}, {\tilde{\psi }})=(0,0)\).
Case (ii): \(\alpha = 0\). In this case, we have \(\alpha _n \rightarrow 0\). From the assumptions on \(f_1\), we note that we can write
Thus,
We observe that
since \(\alpha _n \rightarrow 0\) and \(\{\varphi ^n\}\) is bounded in \(L^\infty (0,T;H_0^1(0,L))\). As a consequence, from the compactness Aubin–Lions–Simon Lemma,
Proceeding analogously for \(f_2\), we deduce
Passing to the limit in (4.5) and using (4.13)–(4.14), we arrive at
and for \({\tilde{\varphi }}_{t}=\eta \) and \({\tilde{\psi }}_{t}=\zeta \), it yields in the distributional sense
which implies from Assumption 2.5that \((\eta ,\zeta )=(0,0)\), therefore \(({\tilde{\varphi }}_{t},{\tilde{\psi }}_t)=(0,0)\). Returning to (4.15) and proceeding verbatim what we have done before we deduce that \(({\tilde{\varphi }}, {\tilde{\psi }})=(0,0)\). As a consequence, one has
Let us keep in mind that our objective is to prove that \(E_{U^n}(0)\) converges to zero. For this purpose, let \(P_1\) the wave operator defined by
First, we will prove that
Indeed, from above convergence (4.17) we know that
So, let us consider \(\mu _{{\tilde{\varphi }}}\) be the microlocal defect measure (m.d.m.) associated to \(\{{\tilde{\varphi }}_t^{n}\}\) (which is assured by Theorem 5.5 in Burq–Gérard [6], see also [20]). Then, by (4.7), (4.13) and (4.19), we deduce
Analogously, defining
we also infer (similarly as above) that
Taking into account that \(\omega \) geometrically controls \(\Omega \), we deduce two facts:
- (i):
-
The \(\hbox {supp}(\mu _{{\tilde{\varphi }}})\) is contained in the characteristic set of the wave equation \( \{\tau ^2=\frac{k(x)}{\rho _1(x)} |\xi |^2\}, \) where \(p_1(t,x,\tau ,\xi )=\frac{1}{2}\left( -\tau ^2 + \frac{k(x)}{\rho _1(x)}\xi ^2\right) \) denotes the principal symbol of \(P_1.\)
- (ii):
-
The m.d.m. \(\mu _{{\tilde{\varphi }}}\) propagates along the bicharacteristic flow of this operator, which signifies, particularly, that if some point \(\omega _0=(t_0,{x}_0,\tau _0, {\xi }_0)\) does not belong to \(\hbox {supp}(\mu _{{\tilde{\varphi }}})\), then the whole bicharacteristic issued from \(\omega _0\) is out of \(\hbox {supp}(\mu _{{\tilde{\varphi }}}).\)
Indeed, from (4.21) and Theorem 5.6 in Burq and Gérard [6] we deduce item \(\mathbf{(i)}\). Furthermore, from Proposition 6.2 and Theorem 6.1 found in Burq and Gérard [6], we deduce that \(\hbox {supp}(\mu _{{\tilde{\varphi }}})\) in \((\Omega \times (0,T))\times S^1\), (\(\Omega :=(0,L)\)) is a union of curves like
where \(t\in I \mapsto x(t)\in \Omega \) is a geodesic associated to the metric \(G_1=(\frac{k}{\rho _1})^{-1}\).
Since by (4.7), we have \({\tilde{\varphi }}_t^{n} \rightarrow 0\) strongly in \(L^2(\omega \times (0,T))\) then, from Remark 5.15 in Burq and Gérard [6], we have that \(\mu _{{\tilde{\varphi }}}=0\) in \(\omega \times (0,T)\) and, consequently,
On the other hand, let \(t_0 \in (0,+\infty )\) and let x be a geodesic of \(G_1\) defined near \(t_0\). Once the geodesics inside \(\Omega \backslash \omega \) enter necessarily in the region \(\omega \), then for any geodesic of the metric \(G_1\), with \(0\in I\) there exists \(t >0 \) such that \(m\pm (t)\) does not belong to \(\hbox {supp}(\mu _{\varphi })\), so that \(m\pm (t_0)\) does not belong as well and item \(\mathbf{(ii)}\) follows.
Once the time \(t_0\) and the geodesic x were taken arbitrarily, we conclude that \(\hbox {supp}(\mu _{{\tilde{\varphi }}})\) is empty. Therefore, employing again [6, Remark 5.15], we have
Moreover, from (4.7) we claim that
In fact, first of all, we observe that
From (4.7), we have that \(L_1\rightarrow \,0\) when \( k\rightarrow \infty \,. \) For \( L_2 \) consider the following decomposition:
Note that
since \(E_{{\widetilde{U}}_n}(0) \le 1. \) Therefore,
Since \( \varepsilon >0 \) is arbitrary, it follows that \(\displaystyle \lim _{n\rightarrow +\infty }J_1=0\,.\) Proceeding in the same way, we show that \(\displaystyle \lim _{n\rightarrow +\infty }J_3=0\,.\) Finally, from (4.24) we deduce that \(\displaystyle \lim _{n\rightarrow +\infty }J_2=0\) as \(n\rightarrow \,\infty \). Then, these facts guarantee us the statement given in (4.25), that is, the kinetic part of the energy with respect to the displacement goes to zero.
Proceeding analogously as above, we can also conclude that the kinetic part of the energy with respect to the rotation angle goes to zero, namely,
In what follows, we are going to recover the convergence of the potential part of the energy. To do so, let consider the equipartition of the energy; that is, let us first consider \(\theta \in C_{0}^{\infty }(0,T); 0\le \theta \le 1\) and \(\theta =1 ~~\text{ in }~~(\epsilon ,T-\epsilon )\).
Now, let us take the multipliers \({\tilde{\varphi }}^n \theta (t)\) and \({\tilde{\psi }}^n \theta (t)\) in the first and second equations of (4.5), respectively. Then, adding the resulting expression, we get
Taking (4.7), (4.17), (4.18), (4.19), (4.25), (4.28) and (4.29) into account, yields
and then
Moreover, from (4.31) and regarding assumption (2.9), we conclude
which implies, jointly with all the above convergences, that
Since the energy is non-increasing, we obtain
From this and using the energy identify (see (3.3))
along with the convergence (4.7), we arrive at
Thus, from (4.32) and using again the energy identify and the limit in (4.7), we finally conclude that
Hence, \(E_{{\tilde{U}}^n}(0)\rightarrow 0 \text{ when } n\rightarrow +\infty ,\) which concludes the desired contradiction.
This completes the proof of (3.9) as desired and finishes the proof of Proposition 3.3. \(\square \) The conclusion of the proof of Theorem 3.2 follows the verbatim the same arguments as presented in the references [8, 30]. For the sake of completeness, we also provide it here as follows.
4.2 Proof of Theorem 3.2
Let \(T>T_0\), where \(T_0\) comes from the observability inequality. From (3.9) we have
for some constant \({\overline{C}}_T>0\).
Now, given a strong solution \( U=(\varphi ,\varphi _t,\psi ,\psi _t)\) of (2.1), we define the following sets
Our strategy here is to estimate the integrals at the right side of (4.33). First, note that
From Assumption 2.1, we have
Now, using (3.4) we obtain
where the last inequality is obtained using the Jensen’s inequality. Therefore, using (4.35) and (4.36),
Analogously, we can conclude that
Since each \(h_i\) is an increasing function, then combining the energy identity, (4.37) and (4.38), we have
where r was defined in (3.5). Setting the constants
and using (3.2), we arrive at
Using the notation introduced in (3.6), the previous inequality can be rewritten as
To finish the proof, we replace T by \((m+1)T\) (respectively, 0 by mT) in (4.39), \(m\in {\mathbb {N}}\), in order to obtain
Thus, using [23, Lemma 3.3] with \(s_m = E_ U(mT)\), we can conclude that
Finally, observing that for every \(t>T\) we can find \(m\in {\mathbb {N}}\) and \(\tau \in [0,T]\) such that \(t = mT +\tau \), then
where we have used the fact that the solution S of (3.7) is dissipative.
Therefore, the proof of Theorem 3.2 is complete. \(\square \)
5 Further remarks
We finish this work by giving some examples of 1-D metrics
that satisfy the geometric control condition. It is enough to choose one them, for example \(G_1\). To this purpose, let us remember that
is the principal symbol of the wave operator \(P_1= \rho _1 \partial _t^2 - [k(x)\partial _x]_x\). In order to obtain the Hamiltonian flow, keeping in mind that
one has in our case
where the subscript \('\) denotes the x-derivative of the function \(\frac{k(x)}{\rho _1(x)}\). Thus,
where \(\dot{}\) stands for the time derivative.
We observe that once \({\dot{\tau }}(s)=0\), then \(\tau (s)=\tau _0=constant\). Now, being \(p=0\) on each null bicharacteristic, yields
On the other hand from the above relationships, we deduce that
and from the second identity on the right hand side of the last identity, we obtain
from which we deduce that
Analogously, one can conclude
The above formulas (5.1) and (5.2) allow us to deduce concrete examples where the geometric control condition (GCC) holds true; that is, Assumption 2.2 is not empty.
Example 5.1
Let us first consider three cases where the GCC is verified.
- \(\mathbf{(a)}\):
-
Assuming \(\frac{k}{\rho _1}(x)=c_0>0\), then \(x(t) = x(0) \pm c_0^{1/2}\tau _0 t\), for some \(x(0)\in (0,L)\) and \(t\in I \cap (0,\infty )\). Hence, the GCG is ensured.
- \(\mathbf{(b)}\):
-
Considering \(\frac{k}{\rho _1}(x)=x\), then we deduce easily that \(x(t) = \left( (x(0))^2 \pm \frac{\tau _0}{2} t\right) ^2\) and, therefore, the CGC also holds true.
- \(\mathbf{(c)}\):
-
If \(\left( \frac{k}{\rho _1}(x)\right) =x^2\) we infer that \(x(t) = \pm |x(0)| e^{\pm \tau _0\,t}\) and the GCG is also verified.
Finally, we consider an example where GCG fails.
Example 5.2
Let us consider a family of circles centering in the x-axis
Performing differentiation with respect to s, we have
Substituting (5.4) in (5.3), it follows that
Looking (5.5) as a second-order equation in the variable \( {\dot{x}}(s) \), it follows that its roots are
On the other hand, recalling (5.1), one gets
and combining it with (5.6), we infer
Now, using computational analysis to solve the above nonlinear algebraic equationFootnote 1, we obtain that the solutions of the ODE are of the form:
for some real constant \(c_1.\) Since
then
We observe that there are cases for \( \lambda \) where the circle (in the family (5.3)) intercepts the damped area \( \omega \times (0,T) \). Our next goal is to choose suitable values of \( \lambda \) where this situation does not occur. Indeed, fixing \( \lambda \) such that
that is, \( \lambda >x \) or \( \displaystyle \lambda <\frac{x}{3}, \) for all \( x\in \,\omega , \) we conclude that the trapped bicharacteristics associated with the curves (5.3), which are solutions given in (5.8)–(5.9), do not reach the damped area \( \omega \times (0,T) \), taking into account the restriction (5.10) on \( \lambda ,\) see the illustrative case in Fig. f2. Therefore, the GCG fails.

Notes
One can use, for instance, the easy tool Wolfram. See on the website: https://www.wolframalpha.com/input/?i=3*(x(s))%5E2*(x%27(s))%5E2-2*s*x(s)*x%27(s)%2B4*(x(s))%5E2-s%5E2%3D0
References
Bardos, C., Lebeau, G., Rauch, J.: Sharp sufficient conditions for the observation, control, and stabilization of waves from the boundary. SIAM J. Control Optim. 30(5), 1024–1065 (1992)
Barbu, V.: Nonlinear Semigroups and Differential Equations in Banach Spaces. Noordhoff International Publishing, România, Bucuresti (1976)
Barbu, V.: Nonlinear Differential Equations of Monotone Types in Banach Spaces. Springer Monographs in Mathematics, Springer, New York (2010)
Brézis, H.: Operateurs Maximaux Monotones et Semigroups de Contractions dans les Spaces de Hilbert. North Holland Publishing Co., Amsterdam (1973)
Burq, N.: Mesures semi-classiques et mesures de défaut. (French) [Semiclassical measures and defect measures] Séminaire Bourbaki, Vol. 1996/97. Astérisque No. 245 (1997), Exp. No. 826, 4, 167-195
Burq, N., Gérard, P.: Contrôle Optimal des équations aux dérivées partielles. 2001, http://www.math.u-psud.fr/~burq/articles/coursX.pdf
Burq, N., Gérard, P.: Condition nécessaire et suffisante pour la contrôlabilité exacte des ondes. (French) [A necessary and sufficient condition for the exact controllability of the wave equation]. C. R. Acad. Sci. Paris Sér. I Math. 325(7), 749–752 (1997)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Falcão Nascimento, F.A., Lasiecka, I., Rodrigues, J.H.: Uniform decay rates for the energy of Timoshenko system with the arbitrary speeds of propagation and localized nonlinear damping. Z. Angew. Math. Phys. 65(6), 1189–1206 (2014)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Fukuoka, R., Toundykov, D.: Stabilization of the damped wave equation with Cauchy-Ventcel boundary conditions. J. Evol. Equ. 9(1), 143–169 (2009)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Fukuoka, R., Soriano, J.A.: Asymptotic stability of the wave equation on compact surfaces and locally distributed damping-a sharp result. Trans. Am. Math. Soc. 361(9), 4561–4580 (2009)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Fukuoka, R., Soriano, J.A.: Asymptotic stability of the wave equation on compact manifolds and locally distributed damping: a sharp result. Arch. Ration. Mech. Anal. 197(3), 925–964 (2010)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Fukuoka, R., Pampu, A.B., Astudillo, M.: Uniform decay rate estimates for the semilinear wave equation in inhomogeneous medium with locally distributed nonlinear damping. Nonlinearity 31(9), 4031–4064 (2018)
Cavalcanti, M.M., Domingos Cavalcanti, V.N., Lasiecka, I.: Well-posedness and optimal decay rates for the wave equation with nonlinear boundary damping-source interaction. J. Differ. Equ. 236(2), 407–459 (2007)
Cavalcanti, M.M., Khemmoudj, A., Medjden, M.: Uniform stabilization of the damped Cauchy-Ventcel problem with variable coefficients and dynamic boundary conditions. J. Math. Anal. Appl. 328(2), 900–930 (2007)
Chueshov, I., Eller, M., Lasiecka, I.: On the attractor for a semilinear wave equation with critical exponent and nonlinear boundary dissipation. Commun. Part. Differ. Equ. 27(9–10), 1901–1951 (2002)
Daloutli, M., Lasiecka, I., Toundykov, D.: Uniform energy decay for a wave equation with partially supported nonlinear boundary dissipation without growth restrictions. Discret. Contin. Dyn. Syst. 2, 67–94 (2009)
Dehman, B., Gérard, P., Lebeau, G.: Stabilization and control for the nonlinear Schrödinger equation on a compact surface. Math. Z. 254(4), 729–749 (2006)
Dehman, B., Lebeau, G., Zuazua, E.: Stabilization and control for the subcritical semilinear wave equation. Ann. Sci. École Norm. Sup. 36(4), 525–551 (2003)
Fatori, L.H., Jorge Silva, M.A., Narciso, V.: Quasi-stability property and attractors for a semilinear Timoshenko system. Discrete Contin. Dyn. Syst. 36(11), 6117–6132 (2016)
Gérard, P.: Microlocal defect measures. Commun. Partial Differ. Equ. 16, 1761–1794 (1991)
Gérard, P., Leichtnam, E.: Ergodic properties of eigenfunctions for the Dirichlet problem. Duke Math. J71(2), 559–607 (1993)
Koch, H., Tataru, D.: Dispersive estimates for principally normal pseudodifferential operators. Commun. Pure Appl. Math. 58(2), 217–284 (2005)
Lasiecka, I., Tataru, D.: Uniform boundary stabilization of semilinear wave equation with nonlinear boundary damping. Differ. Integral Equ. 6, 507–533 (1993)
Lasiecka, I., Toundykov, D.: Energy decay rates for the semilinear wave equation with nonlinear localized damping and source terms. Nonlinear Anal. 64, 1757–1797 (2006)
Lasiecka, I., Triggiani, R.: \(L_2\) regularity of the boundary to boundary operators \( B^* L\) for hyperbolic and Petrovsky PDE’s. Abstract Appl. Anal. 19, 1061–1139 (2003)
Léautaud, M., Lerner, N.: Energy decay for a locally undamped wave equation. Ann. Fac. Sci. Toulouse Math. 26(1), 157–205 (2017)
Ma, T.F., Monteiro, R.N., Pereira, A.C.: Pullback dynamics of non-autonomous Timoshenko systems. Appl. Math. Optim. 80, 391–413 (2019)
Ruiz, A.: Unique continuation for weak solutions of the wave equation plus a Potential. J. Math. Pures Appl. 71,(1992)
Raposo, C.A., Ferreira, J., Santos, M.L., Castro, N.N.O.: Exponential stability for the Timoshenko system with two weak dampings. Appl. Math. Lett. 18(5), 535–541 (2005)
Santos, M.L., Almeida Júnior, D.S., Rodrigues, J.H., Falcão Nascimento, F.A.: Decay rates for Timoshenko system with nonlinear arbitrary localized damping. Differ. Integral Equ. 27(1–2), 1–26 (2014)
Acknowledgements
The authors would like to thank Professor Nicolas Burq for fruitful discussions regarding the bicharacteristic flow in 1-D. Moreover, the authors would like to express their gratitude to the anonymous referee for giving constructive and fruitful suggestions, which have allowed us to improve on the presentation of our work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Research of Cavalcanti partially supported by the CNPq, Grant 300631/2003-0. Research of Corrêa partially supported by the CNPq, Grant 305192/2019-1. Research of Domingos Cavalcanti partially supported by the CNPq, Grant 304895/2003-2. Research of Jorge Silva partially supported by the CNPq, Grant 301116/2019-9. Research of Zanchetta partially supported by the CAPES, Finance Code 001.
Rights and permissions
About this article

Cite this article
Cavalcanti, M.M., Corrêa, W.J., Cavalcanti, V.N.D. et al. Uniform stability for a semilinear non-homogeneous Timoshenko system with localized nonlinear damping. Z. Angew. Math. Phys. 72, 191 (2021). https://doi.org/10.1007/s00033-021-01622-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00033-021-01622-7