
Abstract
Seismic risk in areas of moderate seismicity (AMS) is a reality and destructive earthquakes may occur there. This is why stakeholders and risk managers in these areas show an increasing interest in Earthquake Early Warning Systems (EEWS) and are wondering about the possibility of equipping their territories with such systems. This question of feasibility has to be broached globally: distinguishing technical feasibility from notions of opportunity and utility, an, thus, it has to involve both scientific experts and stakeholders. Moreover, it is necessary to consider each situation specifically without any preconceptions, specifically concerning potential uses that can be made of early warnings, in particular, it is clear that when applied to AMS, the EEWS principles translate into shorter lead times than the ones expected for more seismic areas and would, consequently, require considering new ways of using early warnings. Through the experience conducted for the Pyrenees (France–Spain border) as part of the SISPyr project, this study aims at identifying responses to the potential value of EEWS as real-time seismic risk mitigation tools for AMS as well as to offer a methodological framework to guide stakeholders in their assessment of opportunities to set up EEWS.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
As real-time seismology progresses, the principle of earthquake early warning becomes conceivable for AMS where destructive earthquakes may occur and that are continuously becoming more vulnerable to seismic risk as populations and critical infrastructures are concentrating there. As in Switzerland (Behr et al. 2013) and Spain (Carranza et al. 2013; Romeu et al. 2014), scientists are frequently called to study the feasibility of establishing these areas with EEWS based on existing seismological networks. This firstly requires investigating the technical feasibility of such systems in areas where recurrence intervals associated with destructive earthquakes are long and then to assess their related theoretical performances. On the basis of these elements, it is important to identify the potential end users of EEWS in order to initiate a dialog and to broach with them the use that they could make of early warnings.
One of the main scientific issues about seismic early warning deals with the ability to assess quickly the destructive potential of imminent seismic shaking. When considering regional EEWS, this problem amounts to quickly assessing the magnitude of earthquakes from the first seconds of the waveforms. While many authors have demonstrated the ability to rapidly assess magnitudes >4 and up to 6 or 7 thanks to the first seconds of the P-waves, and they have established either regional (e.g., Lancieri et al. 2011) or global scaling relations (e.g., Zollo et al. 2010), very few studies have considered lower magnitude events (e.g., Heidari et al. 2013; Kuyuk and Allen 2013b). However, while particular attention must be paid to the largest earthquakes (probably of the order of 6.5 in the Pyrenees), which are liable to produce the greatest damage, smaller earthquakes should also be considered when working in AMS so as to be certain to be able to distinguish them from larger earthquakes during the real-time analysis.
On the other hand, an early warning should not be considered as an end in itself, and its utility has to be determined with regard to its effective use for risk mitigation. Indeed, EEWS may be divided into two essential components, which are the scientific analysis and the diffusion/use of the early warning (Nigg 1995). Therefore, even for an early and reliable alert, if it is not relayed in a satisfactory way or if its recipients do not take appropriate actions, an EEWS could be justifiably considered as ineffective. Nevertheless, end user aspects are very often neglected during conception and setting up of EEWS, all the efforts being concentrated on technical questions concerning the emission of alerts. As an example, the Mexican “SAS” system, which has been operating since 1991 and is able to provide alerts of nearly 1 min in Mexico City, is often criticized for the absence of strategy in identification of end users and their needs. This absence of strategy is judged as being the main limiting factor of the efficiency of the system (Suárez et al. 2009). Therefore, it is indispensable not only to identify potential end users of EEWS, but also to evaluate their perception of the system, their needs as well as their considered actions in response to early warnings. Even though it is disconnected from the more technical aspects, this reflection is necessary to guide the conception of the system, from the choice of methods used for the data analysis, to the way to use early warnings.
According to this principle and through the case study of the Pyrenees (see below), this study aims at identifying ways of responding to the potential value of EEWS as real-time seismic risk mitigation tools for AMS, as well as to offer a methodological framework to guide stakeholders in their assessment of opportunities to set up EEWS. In the following section, we focus on “technical” feasibility aspects. The Pyrenean seismic network is first examined in order to assess its adaptability to early warning purposes. In particular, redundancy issues, network coverage, data processing, and time latency of the existing real-time system are analyzed. Then, an assessment of the theoretical performance of the system is made, so as to estimate expected lead-times in the Pyrenees, thus, providing a basis for reflections on how appropriate such a system may be in the area. In addition, performance criteria are proposed in order to facilitate this work for other AMS. Therefore, in the subsequent section, different rapid magnitude determination approaches are tested in order to check their adaptability to the Pyrenean context and to establish empirical relationships useful for this region. To that end, a waveform catalogue was constituted, gathering more than 2,400 records from 193 Pyrenean seismic events. Based on a survey of potential end users from this region that aimed to identify their wishes in terms of early warning, the last section is dedicated to the question of the usefulness of EEWS for the Pyrenees. The article ends with a discussion and some brief conclusions about applicability of seismic early warning for AMS in general.
2 General Overview of the Case Study of Pyrenees
The Pyrenees are a 400-km-long mountain range located in southwest Europe along the French–Spanish border, and it constitutes one of the most earthquake-prone regions of mainland France and Spain, with more than 400 M L ≥ 2.0 events per year, of which about ten are locally felt. In spite of their relatively moderate seismic activity compared to other European countries such as Romania and Italy, the Pyrenees have historically experienced numerous destructive earthquakes, including events in 1428, 1660, 1750 and 1967 which reached intensity VIII (MSK scale: Medvedev et al. 1964) or more (Fig. 1—see SISFRANCE database, BRGM, EDF, IRSN (2010)—http://www.sisfrance.net, last accessed June 30th 2014). The western part of the massif is characterized by a greater seismic activity concentrated along the North-Pyrenean Fault while the eastern part area shows a more diffuse seismicity (Souriau et al. 2005; Olivera et al. 2006). The existence of many events having caused intensity higher than VII (MSK) underlines the necessity to give attention to this area in terms of seismic risk (Secanell et al. 2008).

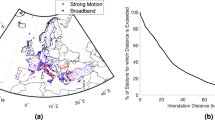
The Pyrenean region is monitored by several seismological networks on both sides of the French–Spanish border, counting in total around 120 seismic stations (broadband and strong-motion sensors taken together). Thanks to a progressive decrease of constraints associated with real-time seismology (generalization of low-cost robust data transfer technologies, continuous increasing of data storage capacities, etc.), a growing proportion of these stations are progressively called to evolve toward real-time data transmission. Moreover, a recent project called “SISPyr” (http://www.sispyr.eu, last accessed June 30th 2014), involving (among others partners) the main owners of Pyrenean seismic stations, has notably allowed the establishment of a real-time pooling process of Pyrenean seismological data resulting in an improvement of the coverage of the massif.
A “rapid response system” (RRS) called “ISARD” (Goula et al. 2008) covers the eastern part of the Pyrenees, and is currently used by civil protection authorities of the Spanish autonomous region of Catalonia for crisis management purposes. It allows automatic rapid calculation and dissemination of loss assessments (both material and human losses). Moreover, the ground motion and shaking intensity calculation code ShakeMap (Wald et al. 1999) has been recently implemented and adapted to the whole Pyrenean massif (Bertil et al. 2012; http://www.sispyr.eu) and arouses the interest of the French and Spain civil protection authorities as a potential help for seismic crisis management. Therefore, it is quite natural that the question of the feasibility of using the current real-time monitoring network in the form of an EEWS has arisen. Of particular interest are the double issues of the technical feasibility and the potential use of such a tool within an AMS.
3 Technical Feasibility of an Early Warning System
3.1 Adaptability and Potential of the Current Real-Time Monitoring System for Early Warning Purposes
3.1.1 Effective network coverage for early warning
There is clear evidence that AMS for such as the Pyrenees do not justify the setting-up and maintenance of seismological networks solely dedicated to earthquake early warning, and the notion of technical feasibility is, therefore, strongly interlocked with the additional notion of the enhancement of preexisting instrumentation. Indeed, efficient and reliable real-time data transmission and processing technologies, both the modern strong-motion and broadband sensors currently used by seismological monitoring networks could conditionally be employed for early warning purposes. In order to assess the adaptability of a given existing seismic monitoring network to early warning purposes, we first define two distinct categories of technical requirements that have to be considered when implementing an EEWS (Table 1): those requirements that are essential to an EEWS (“basic requirements”), and others (“recommended requirements”) that are not mandatory but that would significantly improve the reliability and efficiency of an EEWS and which may be critical for its operational use.
In the Pyrenees, most of the real-time stations fulfil the basic requirements listed in Table 1 because these stations are also used by regional/national seismological data centers for “real-time” event detection and seismic alerts. In total, 52 stations fully accomplish the basic requirements and constitute what we call the current early warning scenario called “EEWS1” (Table 4 in the appendix). Nevertheless, the recommended requirements are not entirely accomplished by all these stations. In particular, except for FNEB that consists of two sensors (one strong-motion plus one broadband), there are no stations with spare data sensors or data acquisition, communication, or power supply systems. To solve this problem, it is recommended to add redundancy to the stations’ equipment, especially to communication systems because their vulnerability is higher than the others. This redundancy also can be reached by increasing station density to allow some fault tolerance thereby reducing the effect of changes in the station distribution.
A key consideration when measuring the efficiency of any EEWS is the notion of “latency”: in other words, “coverage” of the seismological network has to be no longer defined by the density of seismic stations in a given area, but rather by one of the density of available seismic records in a given area at a given instant. Therefore, studying the EEWS1 situation from this viewpoint, we have typical values of latency time (defined as the delay between the seismic signal being recorded at any seismic station and the time when the digitized signal is received at the data center located in Barcelona) for 22 of the 52 considered stations. Calculated over a length of time of 48 h, most of these mean values are lower than 5 s, with an average latency time of 3.7 s. Then, the complete system latency time represented by the so-called “warning time” Tw (being the time when the system is able to produce an alert) will be for a specific hypocenter the result of adding P-waves travel times to the closest stations and the recording time lengths, stations latency times, and data processing times.
Thus, under some hypotheses, this complete system latency may be regionally assessed in order to give an idea about the possible benefits of a virtual Pyrenean EEWS. Among these hypotheses, the most important one is the minimum number of stations required to perform the automatic real-time analysis (including detection, location, magnitude assessment, and so forth). We decided to vary this parameter from one that corresponds to the “on-site” configuration up to four stations. In addition, a typical latency time of 3.7 s (see previous paragraph) has been considered for those stations of Table 4 without any estimates for this parameter. This kind of analysis can lead to maps showing Tw as a function of the hypocentral location. As this time it is not very useful in itself, but we can make it more explicit using the “blind zone” concept (see Sect. 3.1.2).
3.1.2 Simulated Performance Analysis
When considering the application of EEWS, a very important issue is that of the “blind zone,” which designates the area where a warning arrives after the destructive seismic waves (S-waves followed by surface waves). Thus, the blind zone represents the area in which an EEWS is inefficient. Its extension depends on many factors, such as epicentral location and focal depth of the earthquake, topology of the seismological network, latency time of close-field stations, and speed of the calculation process. In a very similar way to the one used by Kuyuk and Allen (2013a) considering regional average values of seismic-wave velocity [V P = 6 km/s and V S = V P/1.75, (Souriau and Pauchet 1998)] and a constant focal depth of 10 km, it is then possible to convert Tw-maps described previously into maps showing the spatial variation of the parameter \(R_{\text{bz}}^{n,t}\). This parameter represents—for an EEWS using the first t seconds of the P-wave from at least n triggered stations to perform its analysis—the average radius of a blind-zone as a function of the hypocentral location. Considering, firstly, that an analysis time of 2 s seems long enough for the real-time assessment of a magnitude in the Pyrenees (see next section), and, secondly, for a minimum of three triggered stations, Fig. 2 shows the distribution of parameter \(R_{\text{bz}}^{ 3, 2}\) obtained for scenario EEWS1. This figure presents relatively short blind-zone radii of 30-40 km in areas with more stations and at the same time underlines their strong spatial inhomogeneity as a function of the effective coverage of seismic monitoring. Another thing that can be seen in Fig. 2 is an increase of \(R_{\text{bz}}^{n,t}\) (here \(R_{\text{bz}}^{ 3, 2}\)) very close to the stations. This apparent paradox results from the observation that below a certain hypocentral distance, real-time stations are useless for early warning using fixed P-waves of a time length for the analysis because of an insufficient time difference between P-waves and S-waves’ arrivals for magnitude assessment. However, this effect can be easily bypassed considering shorter P-waves time lengths in the epicentral area so that local magnitude can be conventionally computed for those of the stations located very close to the epicenter.

Simulated performances of a virtual Pyrenean EEWS based on the EEWS1 SISPyr network: extension of the blind zone as a function of the hypocentral location with an EEWS using a minimum of three records with 2 s of the P-wave (\(R_{\text{bz}}^{3,2}\)). EEWS1 and EEWS2 seismic networks are also represented. The SISPyr project area is represented by the purple polygon. Topology of the ideal network “EEWS3” is schematically shown in the bottom left-hand corner of the figure
\(R_{\text{bz}}^{n,t}\) maps may be very useful when considering the benefit of developing such a system in AMS such as the Pyrenees. Coupling these regional maps with a look at the regional seismicity is also a very valuable way to broach the question of the potential contribution over time of EEWS to real-time seismic risk management.
To that end, we generated a synthetic earthquake catalog using the “unified seismogenic zonation” PSHA and corresponding activity parameters proposed for the Pyrenees by Secanell et al. (2008). The main steps taken to generate this synthetic earthquake catalog are as follows: (1) we, first, consider that earthquakes occurrence within a given seismotectonic zone follows a Poisson process, and then we make use of the zonal annual activity rate λ to calculate the number of events for each zone, (2) secondly, we assume a Gutenberg–Richter relation (Gutenberg and Richter 1954) for a magnitude calculation using the b values, and (3) we, finally, assume that hypocenters occur randomly and uniformly within each zone. So as to be able to calculate robust statistics for large events, we considered an “observation” duration of 10,000 years for this catalog, resulting in 13,672 earthquakes with M L > 4.0 (with 907 5 ≤ M L ≤ 6 events, and 55 events larger than M L 6) (Fig. 2). This synthetic catalog has been created in order to easily identify trends about the usefulness of a potential Pyrenean EEWS. However, it is important to keep in mind that the results presented later in this article are strongly dependent on this catalog and might be slightly different if another catalog was used, for example if using a different seismotectonic zoning.
Considering earthquakes from the synthetic catalog (Fig. 2) located inside the SISPyr project area as representative of the Pyrenean seismicity, we then calculated corresponding theoretical isoseismal curves by using the Pyrenean intensity prediction equation (IPE) of Bakun and Scotti (2006). These curves can be compared with warning times in order to deduce lead times (time interval between the arrival of the warning and the arrival time of the S-waves) associated with given intensity levels and noted \({\text{LT}}_{I}^{n,t}\) (Fig. 3).

a Mean lead-time per magnitude-range corresponding to isoseismal curves I = VI (which corresponds more or less to the threshold of apparition of damage) induced by earthquakes of the synthetic catalog (see Fig. 2), considering a virtual Pyrenean EEWS based on the EEWS1 network (analysis of the first two seconds of the P-waves on the records of the first triggered stations—ranging from one to four: respectively, LT 1,2I=VI , LT 2,2I=VI , LT 3,2I=VI and LT 4,2I=VI ). b Repartition of lead times when considering at least three triggered stations (LT 3,2I=VI )
Figure 3a clearly underlines that, unless considering a major earthquake characterized by a broad epicentral area like the one that occurred in the Pyrenees in 1428 (M ~ 6.2), performances of an EEWS based on the current SISPyr network should—in order to be fully efficient in the entire massif—be able to emit alerts based on an analysis of data from a very limited number of stations (one or two). However, representing mean lead times, Fig. 3a hides strong performance disparities depending on whether earthquakes occur in the area well covered by the EEWS1 network. Thus, regarding the EEWS configuration with at least three triggered stations, Fig. 3b indicates that the range of lead times is relatively wide, with longer times in areas with a good coverage of the real-time EEWS1 network.
While it is unlikely that the setting up of an EEWS justifies, in itself, the addition of many new seismic stations in areas such as the Pyrenees, it is reasonable to assume that most of the seismic networks covering AMS are likely to improve with time. In this way, we consider for the Pyrenees the ongoing process of modernization of existing stations toward real-time data transmission, as well as the installation of new stations. Thus, in addition to the current real-time stations constituting the EEWS1 network, the Pyrenees could be equipped in the coming years with an additional 30 more real-time stations usable for earthquake early warning:
-
26 existing stations whose data transmission in real-time is likely/possible in the medium-term;
-
4 stations whose installation is planned in the French part of Pyrenees through RESIF’s permanent observation network (the French seismological component of EPOS, the European Plate Observing System—http://www.epos-eu.org).
We then consider all these stations as constituting an improved early warning scenario denoted “EEWS2.” Lastly, so as to assess the upper bounds of potentialities of EEWS for the Pyrenees, and even though such a configuration is unlikely in this region, we consider an “ideal” virtual network of 206 stations characterized by a triangular regular topology with a mesh size of 20 km as represented in Fig. 2 and noted “EEWS3.” On an inclusive basis, we assign to each station of network EEWS2 and EEWS3 a mean latency time of 2 s, which is consistent with performances of current seismological data real-time transfer technologies (Kuyuk et al. 2014).
Similarly to scenario EEWS1, the theoretical performances of networks EEWS2 and EEWS3 have been calculated to assess the impact of the strengthening of real-time seismological monitoring of the Pyrenees in terms of seismic early warning. In order to easily compare results obtained from each of these EEWS configurations, Fig. 4 represents the portion of synthetic earthquakes leading to positive lead times for areas affected by different levels of macroseismic intensity (i.e., blind zones smaller than the considered isoseismal) as a function of magnitude, for EEWS using the first 2 s of the P-waves on the records of the first three triggered stations. Evidently, it can be noticed that a densification of the EEWS seismic network improves performance. For an exposure to a given level of intensity, passing from configuration EEWS1 to EEWS2 or EEWS3 leads, in most cases, to a significant decrease in the minimum magnitude for which the first cases of positive lead times appear, thus, the minimum threshold of positive lead times corresponding to intensity VI goes from M L 5.6 for configuration EEWS1 to M L 5.2 for configurations EEWS2/EEWS3. Owing to the fact that network EEWS2 is locally as dense as EEWS3, this value of minimal magnitude changes only slightly between configurations EEWS2 and EEWS3. On the other hand, the distribution of EEWS3 stations being regular, performances associated with that configuration are more homogeneous at the scale of the whole Pyrenees, which in turn results in thinner curves than the ones corresponding to EEWS1 and EEWS2. This dispersion indicates the spatial heterogeneity of the networks (Fig. 4).

Percentage of earthquakes from the synthetic catalog leading to positive lead times for areas with given values of intensity, and for different configurations of EEWS (scenarios EEWS1 in red, EEWS2 in purple and EEWS3 in green)—(analysis of the first two seconds of the P-waves on the records of the first three triggered stations)
3.1.3 Discussion
Even though regional EEWS should ideally rely on seismic networks conceived to optimize robustness and fastness of early warnings such as the one for the Irpinia area in Italy (ISNet, cf. Weber et al. 2007), a look at the SISPyr real-time network shows that the existing stations may be used for early warning purposes. Indeed, the current SISPyr real-time network still satisfies an important part of EEWS requirements such as the real-time centralization of data. Moreover, even though it still has a limited coverage, the real-time network is composed of numerous seismic stations. In addition to its densification, one of the main ways of improving the network in order to implement a Pyrenean-EEWS would be to resort to low-latency data transmission modes, preferring to “push” data by “sample by sample” sending rather than using waveform packets as it is the case today.
Then, comparing intensity predictions related to regional seismicity with theoretical blind-zone extensions shows that in some cases the current network could be used efficiently to provide early warnings of a few seconds up to around 10 s in areas were intensities greater or equal to VI (and thus damage) are expected, depending of the minimum number of stations used for the analysis as well as the location of the earthquakes. Nevertheless, Fig. 2 also indicates that performances of an EEWS based on the SISPyr network (configuration EEWS1) would not be homogeneous in the whole of the Pyrenees due to differences in seismic monitoring coverage. As a consequence, such a system would be much more efficient for earthquakes occurring east of the Pyrenean massif.
In the best-case scenario, if the Pyrenees were equipped with an EEWS based on a dense and homogeneous network with a low data-transmission latency (i.e., configuration EEWS3), areas potentially suffering damage (i.e., with intensities greater than or equal to VI) will likely have positive lead times for more than 70 % of earthquakes with M L ≥ 5.6, while blind-zones associated with the more frequent events with magnitudes around 5 are always larger than the damaged areas. In that case, lead times of about 10 s are expected far from the epicenter, and it is highly probable that the associated intensities would be fairly weak (IV–VI). It should be borne in mind, however, that the considered IPE does not take into account neither potential site effects nor finite fault effects, which could cause damage at greater epicentral distances in areas that could benefit from longer lead times.
3.2 Testing Procedures for Rapid Assessment of Earthquake Magnitude
3.2.1 Waveforms Catalogue
To be able to test current early warning procedures for estimating magnitude in real-time, a catalogue of representative seismic signals of the Pyrenean seismicity was first compiled. For the Pyrenees, an attempt was made to build a catalogue of waveforms, not statistically representative of seismicity all along the Pyrenean chain, but containing as many records as possible corresponding to all the magnitude ranges to be considered in order to better constrain the regression. In practice, the catalogue is composed of vertical strong-motion and broadband seismograms, provided by the various organizations that operate stations in the region. Finally, the waveform catalogue used in this study is made up of more than 2,400 vertical records corresponding to 193 events with local magnitudes ranging between 2.0 and 5.0 (Fig. 5).

Representation of the study data set with the distribution of the seismic signals as a function of magnitude and epicentral distance. Top right-hand corner map of earthquakes included in the catalogue and of corresponding recording seismological stations
3.2.2 Data Processing and Analysis
Four scaling parameters have been selected to be applied in a test stage in the Pyrenees. \(\tau_{\text{c}}\) (Kanamori 2005) and \(\tau_{\text{p}}^{ \hbox{max} }\) (Allen and Kanamori 2003), that can be considered as representing respectively the predominant and the effective period of the P-waves over a fixed time window, are assumed to be empirically log-linearly correlated with magnitude (Eq. 1), while logarithms of peak displacement [P d, (Wu and Zhao 2006)] and peak velocity [P v, (Wurman et al. 2007)] of the first seconds of the P-waves depend both on magnitude and hypocentral distance (R) (Eq. 2).
where y represents either \(\tau_{\text{c}}\) or \(\tau_{\text{p}}^{ \hbox{max} }\) (in s), M L is the local magnitude, and a and b are constants to be determined through a best-fit regression analysis.
where y represents either P d (in cm) or P v (in cm/s), and a, b, and c are constants to be determined through a best-fit regression analysis.
So as to calculate these scaling parameters over the waveform catalog, records have been first corrected for the instrumental response and then the P-wave arrival manually picked from the unfiltered vertical records. Afterwards, after a simple or double integration process (depending of the type of instrument considered), records have been bandpass-filtered between 1 and 50 Hz using a Butterworth filter. Then, P d, P v, \(\tau_{\text{c}},\) and \(\tau_{\text{p}}^{ \hbox{max} }\) have been measured from the bandpass-filtered displacement and velocity records over a time window varying between 1 s and 3 s after the first P-wave arrival. In order to avoid the “contamination” of the analyzed time window with S-wave arrivals due to a time interval separating the onsets of the P-waves and S-waves shorter than the analysis duration, we reject all records where P-wave and S-wave arrivals are not far enough apart so as to compute the various selected parameters. Rather than systematically picking the S-wave onset, we consider the procedure proposed by Wurman et al. (2007) consisting in merely computing the simulated arrival time for the S-waves and retaining only those records in which the interval between P-wave and S-wave arrivals are greater than or equal to the duration of the analysis.
In order to guarantee the quality of our analysis, we also reject all the noisy records considering a minimum signal/noise ratio (SNR) equal to 60 for \(\tau_{\text{c}}\), 30 for \(\tau_{\text{p}}^{ \hbox{max} }\), and 10 for peak parameters P d and P v. Finally, for the sake of homogeneity, we focus our analysis on data recorded at a maximum epicentral distance of 100 km, which covers the maximum distance considered for early warning applications in the Pyrenees.
3.2.3 Results and Discussion
Once the scaling parameters have been computed using the Pyrenean earthquake waveform catalogue according to the procedure described above, they have been compared with reference magnitudes given by the Spanish IGN institute, in order to establish empirical relations enabling magnitude to be estimated in real-time from an analysis of the first few seconds of the P-wave. The peak parameters P d and P v being a function not only of magnitude but also of hypocentral distance, we have normalized them to a reference distance (fixed to 10 km) as suggested by Zollo et al. (2006) in order to remove the dependency on distance. Thus, we can then establish correlations between magnitude and normalized peak values \(P_{\text{d}}^{10}\) and \(P_{\text{v}}^{10}\). To reduce the scatter as much as possible, it is better to study the values of the parameters under consideration averaged for each event rather than the results obtained station-by-station (Wu and Kanamori 2005). To do so, we have not considered a mean of each of the scaling parameters, but rather a mean of their decimal logarithms, which are assumed to be linearly correlated with magnitude. Thus, and to avoid assigning too much weight to certain seismic traces, only those earthquakes for which we have at least two traces satisfying the selection criteria previously presented have been retained for analysis, thereby providing one mean value per event. An example of results obtained with a 3 s time window analysis is shown in Fig. 6 while Table 2 summarizes all empirical relations established for the Pyrenees.

a–d Empirical correlations linking proxy parameters \(\tau_{c}\), \(\tau_{\text{p}}^{ \hbox{max} }\), \({\text{P}}_{\text{d}}^{10}\) ,and \({\text{P}}_{\text{v}}^{10}\) (means per event) with the local magnitude of Pyrenean earthquakes. Calculations carried out on the signals in the catalogue that satisfy the selection criteria (analysis interval set at 3 s). The straight line obtained by linear regression is shown in black, while the grey dashed lines indicate the confidence interval at 95 % for a new observation
From a qualitative standpoint, examining Table 2 allows us to suggest that initial magnitude estimates are able to be derived from a very short analysis interval, which can subsequently be refined in the framework of an evolving approach. For example, shortening the analysis interval from three to two seconds for the case of a single station situated at the epicenter leads to a reduction of the blind-zone by about 5 km. Moreover, it is interesting to note that the empirical correlations found for the Pyrenees are globally coherent with those found in other more seismically active regions of the world (Allen and Kanamori 2003; Lancieri and Zollo 2008; Zollo et al. 2010).
Furthermore, it is shown that although each of the parameters \(\tau_{\text{c}}\), \(\tau_{\text{p}}^{ \hbox{max} }\), \(P_{\text{d}}^{10}\) ,and \(P_{\text{v}}^{10}\) would seem individually to be correlated with earthquake magnitude, some appear to be better proxies than others. Thus, from a statistical standpoint, a look at the coefficient of determination R 2 from Table 2 directly shows that the most satisfactory proxies for the Pyrenees are, in order, \(P_{\text{d}}^{10}\) and \(P_{\text{v}}^{10}\) (which are very similar by nature and cannot be considered as independent parameters), the frequency parameter \(\tau_{\text{c}}\), and lastly the frequency parameter \(\tau_{\text{p}}^{ \hbox{max} }\). Moreover, it should be noted that, as underlined by Kuyuk and Allen (2013b), the correlation observed in Fig. 6 between \(\tau_{\text{p}}^{ \hbox{max} }\) and M < 3 is possible because the high frequencies intrinsic to smaller earthquakes have been preserved in our analysis, while the 3 Hz low-pass filter initially proposed by Allen and Kanamori (2003) for the calculation of \(\tau_{\text{p}}^{ \hbox{max} }\) removes them.
Due to the limited range of magnitudes considered in our analysis, it is not surprising to observe good correlation coefficients for analysis intervals shortened to 1 s (Table 2), as the events considered correspond to relatively short rupture times. In other words, the portion of the signal being analyzed, however short it may be, bears the signature of most, if not all the rupture, and accordingly of the magnitude. A study by Murphy and Nielsen (2009) showed that a 1-s analysis was long enough to assess moment magnitudes smaller than 6.0 (2 s for M < 6.5; 3 s for M < 7.0). For larger magnitudes, the authors observe a saturation of the proxy P d. Theoretically, and taking into consideration a probable maximum magnitude of 6.5 for earthquakes in the Pyrenees, a 2-s analysis of the P wave would appear to suffice to determine the magnitude of Pyrenean events in real-time.
4 Usefulness of a Pyrenean EEWS
Another very important issue on the evaluation of the feasibility of an EEWS deals with the question of the end users in order to assess if such a system could answer an existing need . In particular, the question of “How useful is an early warning for earthquakes associated with long recurrence intervals?” is preponderant and strongly linked to the potential end users’ risk aversion. By its conception, it is consequently imperative that an EEWS should answer requirements of end users in such a way to be adapted to their needs, and not the contrary as it is often the case. Henceforth, the approach of consultation with potential end users is necessary so as to better understand their requirements and their expectations (or conversely their absence of expectations), as well as their needs in terms of early warning. To that end, a survey of potential French end users had been carried out in order to evaluate their wishes in terms of earthquake early warning.
Owing to the simulated performances of a virtual Pyrenean EEWS presented in section 4, the Pyrenean context only allows obtaining early warnings with short lead times. Rather than conducting an inquiry in an “open” way addressing all potential end users, we then favor focusing on actors still well accustomed to crisis management and to the taking of preventive measures, represented by the managers of critical infrastructures. Indeed, these actors are likely to be interested in short seismic early warnings and are the most likely to act as a consequence. In addition, it is important to notice that the operational establishment of an EEWS is generally mainly conditioned on the criticality of exposed elements. As a result, our survey has focused on a limited number of industries and managers of critical networks and dams. Selection of targeted infrastructures was made considering, in priority, “facilities at risk” according to the French seismic zonation (decree No. 2010–1255 of 22th October 2010). In addition, this list of addressees was completed with administrators of electricity, gas, and high-speed train networks. Based on telephone interviews with persons in charge of security of each site/facility, this survey finally allowed gathering the opinion of eleven participants, covering the main regional managers of energy networks (electricity and gas), high-speed railways, and two managers of dams representing together nearly 40 dams, as well as six industrial sites.
4.1 Results and Discussion
As briefly summarized in Table 3, the results of the survey highlight a favorable welcome of the idea to provide the Pyrenees with an EEWS in order to be warned of incoming strong motions, even though their destructive potential remains moderate. Indeed, despite the fact that the majority of conceivable early mitigation actions considered by participants are likely to need more time than the potential available lead times to be fully efficient, their early application seems to be considered as a way to reduce the risk of accidents as well as minimize economic losses, which are very important issues when considering strong interdependencies between critical infrastructures. Indeed, like Wu et al . ( 2013a, b ) who defined utility curves for each early action as a function of available lead times, it seems to be too restrictive to consider that only fully implemented actions before the arrival of strong shaking are useful, that is to say, for example, that the expected benefit of an early process aiming at stopping a high-speed train is maximal if the train is still stopped when strong motions arrive, but remains positive since the speed has been significantly reduced. Otherwise, it can be noticed that while reduction of consequences thanks to the use of an EEWS is expected by most of participants, it does not constitute a necessary condition to use it since the early warning seems to be perceived as precious information in itself, showing that the utility of EEWS does not entirely rely on the ability of users to take early actions.
It should be noted that, due to their own experience, participants tend to favor manual or semiautomatic actions over fully automatic actions in order to react on a case-by-case basis. Nevertheless, discussing individually with each of participants let us conclude that additional automatic actions compatible with very short lead times could be conceivable by means of a shared stage of reflection requiring their accompaniment by specialists of EEWS. This points out the importance to educate potential end users so they can understand the potential and limitations of EEW alerts.
Another aspect that can be pointed out from this survey is that—not surprisingly—potential Pyrenean EEWS end users express a relatively strong demand for reliability of the system. Nevertheless, a lesson can be learned that a slight priority is generally given to security since missed alerts are judged to be slightly more important than false alerts That is, that observation comes essentially from companies with a line of business identified as “industry”, for which this trend is particularly well marked (for these participants, the impact of missed alerts are on average one level higher than those of false alerts). Indeed, uncertainty being inevitably associated with each early warning, EEWS end users have necessarily to define their own level of acceptability. Does an addressee of an early warning prefer to be warned, in a secure sense, at the risk of taking useless (costly) prevention actions in case of false alert, or does he prefer to be warned, in a certain sense, at the risk of missing relevant alerts associated with high uncertainty? It is usually qualitatively considered that the greater the effect of damage (socio-economic, environmental, etc.), the lower the acceptability of the situation, which in terms of early warning is translated by favoring false alerts over missed alarms (Marzocchi and Woo 2007). It is then not surprising that so-called “industrial” users are favorable to “security” as they are submitted to the EU SEVESO Directives on industrial accidents, which in France are associated with a very low acceptance of societal risk. This requirement of reliability of early warnings implies the necessity for new EEWS to qualify the reliability of each alert by means of probabilistic assessments indicating a probability of exceeding threshold values of given intensity measures (IMs). Then these probabilities could be used within automatic decision support systems (DSS) so as to perform real-time cost-benefit or multiattribute analysis to decide the suitable actions (Le Guenan et al. 2014).
5 Conclusion and Perspectives
Aiming at dealing with the question of adaptability of the principle of EEWS to AMS without any preconceptions and bringing together technical aspects with operational needs of end users, this explorative study does not allow concluding definitively on the interest to endow AMS, such as the Pyrenees, with EEWS. However, it highlighted several important points:
-
1.
The methodological framework of early assessment of magnitude seems to be adapted for AMS, making possible the discrimination of numerous smaller earthquakes and less frequent damaging events.
-
2.
Thanks to their continuous modernization, current seismological networks in AMS, such as the ones in the Pyrenees, may be considered as a basis for the development of EEWS, when their densification suggests the possibility of greatly improving lead times.
-
3.
There is clear evidence that the Pyrenees—and probably most AMS—contain stakeholders interested in using seismic early warnings in alternative ways.
In spite of encouraging results, it is, therefore, important to point out that unless these alternative ways are considered, many barriers still remain for the practically establishment of EEWS in AMS: strong attenuation of destruction effects with distance, important installation and maintenance costs of efficient monitoring/communication/transmission solutions, difficulty in calibrating the system, difficulty in raising awareness among end users in the long-term, necessity to identify and to maintain fast automatic mitigation-actions, and so forth.
This being said, several ways offer new alternatives allowing enlarging the range of applications of earthquake early warnings. The first one comes from the field of new technologies and, more specifically, from microelectronic strong-motion sensors (so-called MEMS). As suggested by Evans et al. (2014), some of these MEMS sensors are sensitive and reliable enough to be used for a wide range of applications. Like the Quake Catcher Network (Cochran et al. 2009) that makes use of MEMS data to produce ShakeMaps, the possibility of acquiring and networking many inexpensive sensors is giving birth to new approaches for seismic early warning (Fleming et al. 2009; Wu et al. 2013a, b), which could possibly bypass some of the current barriers to the setting up of EEWS in AMS.
Otherwise, indications given by potential Pyrenean end users (Table 3) concerning, on the one hand, the value of the early warning in itself (independently of the way this warning could be used) and, on the other hand, the interest in engaging early application of actions in order to reduce risk of accidents and minimize economic losses, leads to a reconsideration of preconceived ideas that users may have about the utility of EEWS. Thus, it seems to be suitable to bring down the barrier between. on the one hand, the «early stage» joining artificially and very closely early warnings with early actions, and, on the other hand, the «rapid stage» joining rapid warnings and a rapid response, allowing taking advantage of the early assessment of an earthquake’s focal parameters in order to improve rapidity of rapid response systems and, in doing so, acting in the first seconds after the earthquake. Should we move towards the concept of “Earthquake Early Response Systems” for AMS? This could result in early impact assessments, e.g., ShakeMaps or PAGER (Wald et al. 2008) that are of primary importance for players in emergency management, enabling them to achieve very quickly an overall view of the damage situation and to implement appropriate response strategies.
Lastly, since one of the roles of engineering seismologists working on real-time seismology is to provide decision makers and stakeholders with a methodological framework to guide their assessment of EEWS, this study constitutes a contribution of general interest. Indeed, it generalizes the blind-zone radius parameter proposed in 2013 by Kuyuk and Allen through \(R_{\text{bz}}^{n,t}\), and introduces the lead time parameter \({\text{LT}}_{\text{I}}^{n,t}\). These parameters can be used in order to assess potential performances of an EEWS, respectively, in terms of blind-zone radius and lead time, for different configurations of the system (number “n” of triggered stations and duration “t” of analysis of the P-wave) and protection objectives (intensity “I”). Therefore, this type of “a priori” feasibility analysis may be particularly useful in guiding the decision to move or not to the establishment of a regional EEWS. Then, the aforesaid parameters could, for example, be useful in the attempt to achieve a prototype EEWS that is currently under development in the SW of Spain, where large magnitude earthquakes have occurred in the past (e.g., 1755 Lisbon earthquake, or M7.8, February 1969 earthquake) offshore from San Vicente (Romeu et al. 2014). However, this cannot replace the operational testing phase of an EEWS since many aspects such as source/propagation/site, etc. affects instruments noise level, software robustness, online communication latency, etc., and cannot be accounted for by the framework described in this paper.
References
Allen, R.M., and Kanamori, H. (2003). The potential for earthquake early warning in southern california. Science, 300(5620), 786–789.
Bakun, W. H., and Scotti, O. (2006). Regional intensity attenuation models for france and the estimation of magnitude and location of historical earthquakes. Geophysical Journal International, 164(3), 596–610.
Behr Y, Clinton J, Cua G, Cauzzi C, Heimers S, Kästli P, Becker J, Heaton T (2013) “Evaluation of Real-Time and Off-Line Performance of the Virtual Seismologist Earthquake Early Warning Algorithm in Switzerland”, EGU General Assembly, Vienna, Austria, abstract no. 8824.
Bertil D., Roviro J., Jara J.A., Susagna T., Nus E., Goula X., Colas B., Dumont G., Cabanas L., Anton R., Calvet M. (2012). ShakeMap implementation for Pyrenees in France-Spain border: regional adaptation and earthquake rapid response process. Proc. of the 15th WCEE, paper no 2078.
BRGM, EDF, IRSN (2010) SISFRANCE database of historical seismicity in France. http://www.sisfrance.net.
Carranza, M., Buforn, E., Colombelli, S., Zollo, A. (2013). Earthquake early warning for southern Iberia: A P wave threshold-based approach. Geophys. Res. Lett., 40–17, p. 4588–4593.
Cochran, E.S., J.F. Lawrence, C. Christensen, and R. Jakka, The Quake-Catcher Network: Citizen science expanding seismic horizons, Seismological Research Letters, 80, 26–30, 2009.
Evans, J. R., Allen, R. M., Chung, A. I., Cochran, E. S., Guy, R., Hellweg, M., and Lawrence, J. F. (2014). Performance of several low-cost accelerometers. Seismological Research Letters, 85(1), 147–158.
Fleming, K., Picozzi, M., Milkereit, C., Kuehnlenz, F., Lichtblau, B., Fischer, J., Kafadar, N. (2009). The self-organizing seismic early warning information network (SOSEWIN). Seismological Research Letters, 80(5), 755–771.
Goula, X., Dominique, P., Colas, B., Jara, J.A., Roca, A. and Winter, T. (2008). Seismic rapid response system in the Eastern Pyrenees. XIV World Conference on Earthquake Engineering, October 12–17, Beijing, China.
Gutenberg, B. and Richter, C. F. (1954). Seismicity of the Earth and Associated Phenomena, Princeton University Press, Princeton, NJ.
Heidari, R., Shomali, Z., and Ghaymaghamian, M. R. (2013). Magnitude-scaling relations using period parameters tau (sub c) and tau (sub p) (super max), for Tehran region, Iran. Geophysical Journal International, 192(1), 275–284.
Kanamori, H. (2005). Real-time seismology and earthquake damage mitigation. Annual Review of Earth and Planetary Sciences 33, 195–214.
Kuyuk, H. S., Allen, R. M., Brown, H., Hellweg, M., Henson, I., and Neuhauser, D. (2014). Designing a network-based earthquake early warning algorithm for california; ElarmS-2. Bulletin of the Seismological Society of America, 104(1), 162–173.
Kuyuk, H. S., and Allen, R. M. (2013a). Optimal seismic network density for earthquake early warning: A case study from California, Seismol. Res. Lett., 84(6), 946–954.
Kuyuk, H. S., and Allen, R. M. (2013b). A global approach to provide magnitude estimates for earthquake early warning alerts. Geophysical Research Letters, 40(24), 6329–6333.
Lancieri M., and A. Zollo (2008). A Bayesian approach to the realtime estimation of magnitude from the early P and S wave displacement peaks. Journal of Geophysical Research 113, B12302.
Lancieri, M., Fuenzalida, A., Ruiz, S., and Madariaga, R. (2011). Magnitude scaling of early-warning parameters for the Mw 7.8 Tocopilla, Chile, earthquake and its aftershocks. Bulletin of the Seismological Society of America, 101(2), 447–463.
Le Guenan, T., Auclair, S., Douglas, J., Loschetter, A., Smai, F., Taillefer, N. (2014). Participatory decision making for operational earthquake forecasting and Earthquake early warning. Proceeding of the 2nd European Conference on Earthquake Engineering and Seismology (2ECEES). Istambul, August 24–29 2014.
Marzocchi, W., and G. Woo (2007). Probabilistic eruption forecasting and the call for an evacuation, Geophys. Res. Lett., 34, L22310.
Medvedev, S., Sponheuer, W. and Karník, V. (1964). Neue seismische Skala Intensity scale of earthquakes, 7. Tagung der Europäischen Seismologischen Kommission vom 24.9. bis 30.9.1962. In: Jena, Veröff. Institut für Bodendynamik und Erdbebenforschung in Jena, Deutsche Akademie der Wissenschaften zu Berlin, 77, 69–76.
Murphy, S., and Nielsen, S. (2009). Estimating earthquake magnitude with early arrivals: A test using dynamic and kinematic models. Bulletin of the Seismological Society of America 99:1, 1–23.
Nigg J.M. 1995. Risk communication and warning systems. In Hortlick-Jones T., A. Amendola and R. Casale (eds.). Natural Risk and Civil Protection. London: E & FN Spon. Pp. 369–382.
Olivera, C., Redondo, E., Lambert, J., Riera Melis, A. and Roca, A. (2006) Els terratrèmols dels seglesXIV i XV a Catalunya. Monografies Institut Cartogràfic de Catalunya.
Romeu, N., Goula, X., Jara, J.A., Colom, Y. and, Susagna, T. (2014). An Earthworm based prototype of an EEWS for SW Iberia (this issue).
Secanell, R., Bertil, D., Martin, C., Goula, X., Susagna, T., Tapia, M, Dominique, Carbon, D. and Fleta, J. (2008). Probabilistic seismic hazard assessment of the Pyrenean region, Journal of Seismology 12: 323–341.
Souriau, A. and Pauchet, H. (1998). A new synthesis of Pyrenean seismicity and its tectonic implications. Tectonophysics 290, 221–244.
Souriau, A., Rigo, A., Dubos, N., Sylvander, M. and Ponsolles, C. (2005). Analysis of the seismicity in the central part of the Pyrennes (France) and tectonic implications. Journal of Seismology 9, 211–222.
Suárez, G., D. Novelo, and E. Mansilla (2009). Performance evaluation of the seismic alert system (SAS) in Mexico City: A seismological and a social perspective. Seism. Res. Lett. 80 (5), 707–714.
Terrier, M., Bertrand, G. and Roullé A. (2006). Document d’information sur le risque sismique à destination des médias. Rapport BRGM/RP-55012-FR, 219p, 128 fig.
Wald, D. J., P. S. Earle, T. I. Allen, K. Jaiswal, K. Porter, and M. Hearne (2008). Development of the U.S. Geological Survey’s PAGER system (Prompt Assessment of Global Earthquakes for Response). Proc. 14th World Conf. Earthq. Eng., Beijing, China, 8 pp.
Wald, D.J., Quitoriano, V., Heaton, T.H., Kanamori, H., Scrivner, C.W., and Worden, B.C., 1999, TriNet “ShakeMaps”: Rapid generation of peak ground-motion and intensity maps for earthquakes in southern California: Earthquake Spectra, v. 15, no. 3, p. 537–556.
Weber, E., Convertito, V., Iannaccone, G., Zollo, A., Bobbio, A., Cantore, L., Satriano, C. (2007). An advanced seismic network in the southern Apennines (Italy) for seismicity investigations and experimentation with earthquake early warning. Seismological Research Letters, 78(6), 622–634.
Wu, S., Beck, J. L. and Heaton, T. H. (2013), ePAD: Earthquake Probability-Based Automated Decision-Making Framework for Earthquake Early Warning. Computer-Aided Civil and Infrastructure Engineering, 28: 737–752.
Wu, Y. M., and L. Zhao (2006), Magnitude estimation using the first three seconds p-wave amplitude in earthquake early warning, Geophys. Res. Lett., 33, L16312.
Wu, Y., Chen, D., Lin, T., Hsieh, C., Chin, T., Chang, W., Ker, S. (2013). A high-density seismic network for earthquake early warning in taiwan based on low cost sensors. Seismological Research Letters, 84(6), 1048–1054.
Wu, Y.M., and Kanamori, H. (2005). Rapid assessment of damage potential of earthquakes in Taiwan from the beginning of P waves. Bulletin of the Seismological Society of America 95:3, 181–185.
Wurman, G., Allen, R.M., and Lombard, P. (2007). Toward earthquake early warning in northern California. Journal of Geophysical Research 112:B8.
Zollo A., O. Amoroso, M. Lancieri, Y.-M. Wu, H. Kanamori (2010). A threshold-based earthquake early warning using dense accelerometer networks. Geophys. J. Int., 183, 963–974.
Zollo, A., Lancieri, M. and Nielsen, S. (2006). Earthquake magnitude estimation from peak amplitudes of very early seismic signals on strong motion records. Geophysical Research Letters 33:23, L23312.
Acknowledgments
This work was supported by the POCTEFA European program Interreg IVA 2007–2013 France–Spain–Andorra, as well as by the ALERTES-RIM project funded by the Spanish Ministry of Economy and Competitiveness. We thank the people that helped in the database creation (M. Calvet from OMP and E. Nus from ICGC), as well as J. Baron for her upstream work on data processing for magnitude scaling parameters and J. Douglas for his comments that greatly helped us during this study. Special thanks to E. Buforn for her invitation to contribute to this special issue and to J. Douglas for proofreading the final version. Finally, we are very grateful to the three anonymous reviewers whose comments greatly improved the quality of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Auclair, S., Goula, X., Jara, JA. et al. Feasibility and Interest in Earthquake Early Warning Systems for Areas of Moderate Seismicity: Case Study for the Pyrenees. Pure Appl. Geophys. 172, 2449–2465 (2015). https://doi.org/10.1007/s00024-014-0957-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-014-0957-x