
Abstract
European researchers and seismic networks are active in developing new approaches to earthquake early warning (EEW), implementing and operating test EEW systems, and in some cases, offering operational EEW to end users. We present the key recent developments in EEW research in Europe, describe the networks and regions where EEW is currently in testing or development, and highlight the two systems in Turkey and Romania that currently provide operational systems to a limited set of end users.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Earthquake early warning (EEW) systems are becoming commonplace in many areas of the world where elevated seismic hazard is actively monitored by high quality seismic network infrastructure (Allen et al. 2009). Many parts of Europe have a history of moderate (<M7) though damaging earthquakes, and the hazard across large parts of the continent is high (Fig. 1; Woessner et al. 2015). Outside of the few areas where larger events can occur, the critical earthquakes for earthquake early warning (EEW) in Europe are these moderate events where significant ground motion is limited to within about 20 km of the epicenter. In terms of EEW, this means the most relevant warnings—those warnings that are in advance of truly damaging ground motions—must be fast (Meier et al. 2015). Selected areas of Europe, such as Turkey, Greece and Romania, also suffer from larger >M7 events, both shallow and deep in origin, that produce damaging motions across broad regions, and an effective EEW in these cases also requires characterising the finite source.

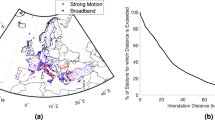
Areas in the European region where EEW is operating (Romania, Istanbul), in development (Israel) and under test (Switzerland, Irpinia, NE Italy, Patras, Iceland). Background map is the SHARE European Hazard Map (Woessner et al. 2015)
In the early years of seismology, European institutions led the world in the deployment of seismic stations and networks, though only in the last decade have dense, high quality seismic networks become the norm across the continent. Efforts are still required to optimise these networks for EEW by providing minimal data latency at processing hubs alongside highly reliable communications. Hence EEW in Europe is still some way from becoming widely feasible (Behr et al. 2016).
With the current density and performance of optimally tuned seismic networks, and best operational EEW algorithms, regional EEW is possible with latency ~4–10 s after the earthquake origin time. With algorithmic improvements, data latencies under 1 s, and network density of ~10 km spacing, a best possible performance EEW alert delay is on the order of 3–6 s, which for shallow events, could reduce the regions where no EEW alert is possible to within 10–20 km of the epicenter.
EEW in Europe is not yet a product demanded by the general public or even the scientific community. In Europe, the number of networks running test or indeed operational EEW systems is limited to a handful, covering only a small fraction of the regions with high hazard (Fig. 1), and there have been no significant events occurring in these regions since the operational period began. Hence there has been limited possibility to demonstrate the capability of EEW in a European context. Additionally, network operations and EEW research across Europe is somewhat fragmented with numerous small groups, though some centralized European funding focusing on EEW has consistently been provided over the past 10 years through short term EU projects, namely: SAFER, REAKT (http://www.reaktproject.eu/), now EPOS IP (http://www.epos-eu.org). Despite these challenging conditions, there are some significant successful research and coordination efforts across the continent, as highlighted in this report. For example, the PRESTo (Probabilistic and Evolutionary Early Warning System) algorithm, developed in Italy, is part of the operational EEW system in Romania. Further success of algorithm development in Europe is illustrated by Virtual Seismologist (VS) and FinDer being included in ShakeAlert demonstration system in California.
The reader is referred to Allen et al. (2009) for an overview for the general approaches for EEW, and a summary of implementation at the global scale; this review can be considered an update for Europe.
2 EEW methods and testbeds in Europe
The moderate seismicity across many parts of Europe means that the focus of EEW is typically on speed rather than source characterisation for large events, though research on rapid, finite fault characterisation is increasing. Europe houses a number of groups at the cutting edge of research in EEW, the activity and scope of a number of these is briefly described below.
2.1 PRESTo at the University of Naples
In 2003, the seismological laboratory of the Department of Physics at the University of Naples, Federico II started the prototype implementation and testing of the first EEW system for Italy with the support of the consortium AMRA scarl, which provided the financial resource for the acquisition, building and maintenance of the core seismic infrastructure for EW, the Irpinia Seismic Network (ISNet).
ISNet is deployed along the southern Apenninic chain covering the seismogenic areas of the main earthquakes that occurred in the region over recent centuries, including the M6.9, 23 November 1980 event, a complex normal-fault earthquake that caused more than 3000 causalities and significant, widespread damage to buildings and infrastructure throughout the region (Westaway and Jackson 1984; Bernard and Zollo 1989).
ISNet is a local network of strong motion, short period and broad band seismic stations that is presently composed of 32 stations organized in three sub-nets, communicating to a network control center in Naples, using wireless and ADSL communications. To ensure a high dynamic recording range, each seismic station is equipped with a strong-motion accelerometer and a three-component 1-s velocity sensor. Data acquisition at the seismic stations is performed by a 24bit digitiser and an embedded, customisable Linux system computer.
The control center in Naples operates the PRESTo software that processes the accelerometric waveforms for Early Warning purposes. PRESTo is a free and open source software platform for EEW (Satriano et al. 2010, http://www.prestoews.org) that implements a regional approach to early warning. It is a stand-alone application as it only requires real-time streams of (up to) 3-component acceleration waveforms. In the case of ISNet, the data loggers ensures that data is received in packets of 1-s length every second in order not to hamper the early warning performance, with a typical transmission latency of 0.8 s.
While seconds of a (real or simulated) event, PRESTo promptly performs phase picking and event declaration and provides location and magnitude estimates as well as shaking predictions at target sites using a regional, network-based approach. The FilterPicker algorithm (Lomax et al. 2012) is used for automatic picking of phase arrivals. The earthquake location is obtained by an evolutionary, real-time probabilistic approach (RTLoc, Satriano et al. 2008) based on an equal differential time (EDT) formulation. At each time step, the algorithm uses information from both triggered and not-yet-triggered stations. The highest probability hypocenter, origin time and errors on location coordinates are computed within few seconds from the first P arrival, based on the 3-D velocity model of P-waves for the geographic area of interest, the P-wave arrival times at stations, the location of non-triggered stations and the current time. The real-time magnitude is estimated by the RTMag algorithm (Lancieri and Zollo 2008), which uses ground motion empirical relationships that relate the earthquake magnitude to peak displacement (Pd) measured at each station in a window of 2–4 s of P- or S-waves signal, given the hypocentral distances to the stations. A probability density function (pdf) for the earthquake magnitude is obtained through a Bayesian method thus providing both the most likely magnitude (peak of the resulting distribution) and uncertainty. Finally, the peak ground-motion parameters (PGA, PGV, Instrumental Intensity) are estimated at all remote sites to warn, through ground motion prediction equations (GMPE) for the region, using e.g. Emolo et al. (2011) for low-magnitude earthquakes and Akkar and Bommer (2007) for moderate-to-large magnitude events.
Alarm messages containing the evolutionary estimates of source and target parameters, and their uncertainties, are sent over the internet, in the form of short text messages delivered through the User Datagram Protocol (UDP) transport layer in order to be delivered as fast as possible. As a last step, the final estimates of the earthquake source parameters are sent as cell phone text message and e-mail, to a distribution list.
When a dense seismic network is deployed in the fault area, as is the case for ISNet, PRESTo can produce reliable estimates of earthquake location and magnitude within 4–6 s from the first P-time, and a stable solution is generally reached within 10 s.
The regional approach to early warning has been recently extended to include real-time estimation of the Potential Damage Zone (PDZ, Zollo et al. 2010), i.e. the area expected to be affected by strong shaking and Instrumental Intensities larger than VII. The characteristic P-wave period, \({{\tau }}_{\text{c}}\), and peak displacement in a short time window after the first P-arrival time, \({\text{P}}_{\text{d}}\), are simultaneously measured at each station. The instrumental intensity map (PDZ) is obtained by the real-time mapping of observed and predicted P-peak displacement amplitudes (Pds), measured on a short time window (3 s of P-waves signal on the vertical component). The measured Pds are used to predict the Peak Ground Velocity (PGV) at the recording sites of the network (e.g. Zollo et al. 2010), which allows estimation of the perceived shaking/expected damages through the Instrumental Intensity which is derived from PGV (Wald et al. 1999). The predicted Pds are computed by applying the ground motion prediction equations relating Pd to the distance and to characteristic period \({{\tau }}_{\text{c}}\), which is a proxy for magnitude. By interpolating predicted and observed Pds, a region-wide PDZ can be provided in a few seconds after the earthquake origin time (Colombelli et al. 2012), thus providing valuable information about the potential earthquake effects to be used for automatic and individual safety actions. By mapping the earthquake shaking level in the epicentral area, the PDZ implicitly accounts for the maximum ground shaking caused by an extended faulting process, without assuming a specific kinematic rupture model and related parameters.
2.2 Multi-parameter wireless sensing unit (MP-WISE) at GFZ Potsdam
The early warning research group at GFZ mostly focuses on the development of wireless sensor units to be installed and used during seismic emergency crises. The idea of wireless sensing units (WSU) for structural health monitoring was first proposed by Straser and Kiremidjian (1998). Such units have been enhanced by including recently developed microelectromechanical systems (MEMS) for ground (or building) motion measurement and computational units that optimise performance and run decentralised damage analysis programs (e.g., Lynch et al. 2004). Efforts within the framework of the SAFER (Seismic eArly warning For EuRope) and the German EDIM (Earthquake Disaster Information system for Marmara Region, Turkey, Wenzel et al. 2014) projects by the Helmholtz Center Potsdam, GFZ, German Research Center for Geosciences, in collaboration with the Department of Informatics of the Humboldt University Berlin, led to the development of a WSU referred to as the Self Organising Seismic Early Warning Information Network (SOSEWIN) (Fleming et al. 2009). SOSEWIN units were comprised of off-the-shelf components to create a decentralised, self-organising wireless mesh network, where each unit can independently undertake its own data processing. In the first implementation, SOSEWIN units (only recording ground acceleration) were capable of issuing a robust, on-site, threshold-based early warning decision, either based on single or multiple local sensors by taking advantage of their communication capabilities. A SOSEWIN network would be suitable for both structural health monitoring and earthquake early warning activities. This dual application overcomes the need to use different instruments in order to cover such different tasks.
These units and those subsequently developed have been exploited on various projects. For example, Picozzi et al. (2010) proposed a new version of the SOSEWIN called GFZ-WISE that combines SOSEWIN units with standard geophones in order to also record ground velocity. During the recent REAKT project, the SOSEWIN system was installed in several test areas (e.g., the AHEPA Hospital in Thessaloniki, Greece, a residential building in the Atakoy district of, Istanbul, Turkey) (Fig. 2) sites and ad-hoc software for decentralized analysis developed and installed in the units (Parolai et al. 2015; Bindi et al. 2015a, b this volume; Pitilakis et al. 2015 this volume). The performance of the SOSEWIN units and the decentralized-onsite early warning software, which is still in the testing phase, are under assessment.

Bottom location of the SOSEWIN networks installed by the GFZ. Top left sensor installations in the AHEPA complex in Thessaloniki (Greece). Top right sensor installations in the residential building in Istanbul (Turkey). Note that the status of the network is accessible at http://lhotse21.gfz-potsdam.de/nagvis/frontend/nagvis-js/index.php?mod=Map&act=view&show=World
It is worth noting that during the last phase of REAKT, a new extension of the SOSEWIN unit was developed to accommodate multi-parameter recording and therefore making it suitable also for landslide early warning and monitoring, seismic array measurements, earthquake post-event actions and building tagging. In particular, this multi-parameter wireless sensing unit (MP-WISE) (Boxberger et al. 2015) in addition to the previous SOSEWIN characteristics, is able to:
-
1.
Acquire data from standard strong motion and velocimeter sensors, MEMS, gyroscopes, camera, temperature and humidity sensors and low cost GNSS systems;
-
2.
Transmit the data via standard LAN and UMTS communications protocols;
-
3.
When triggered by the onsite-decentralised software developed by GFZ (Parolai et al. 2015; Bindi et al. 2015a), it is able to activate alarm procedures (e.g., sirens, lights etc.).
These new units will be further developed, tested and used in the SeIsmic monitoring and vulneraBilitY framework for civil protection (SIBYL) project (http://www.sibyl-project.eu/) which aims to develop an operational framework for Civil Protection (CP) authorities to rapidly and cost-effectively assess the seismic vulnerability of the built environment.
2.3 Virtual Seismologist, FinDer, Gutenberg Algorithm and EEWD at the Swiss Seismological Service (SED) at ETH Zurich
The SED at ETH Zurich installed one of the first modern dense broadband seismic networks across Switzerland in 1999, with an initial 25 seismic stations with station spacing of around 50 km. Strong motion stations began to be installed in 2006. Currently over 100 strong motion and 40 broadband stations are monitored in real-time by the seismic network (Diehl et al. 2015), and all instrumentation is in the process of being modernised to ensure minimal communication delays across the system. Though seismicity in Switzerland is moderate, the quality of the seismic network makes it an ideal test-bed for testing new EEW algorithms. The SED has had an active EEW development group over the last 10 years. The Virtual Seismologist (VS) algorithm (Cua and Heaton 2007) is a network-based Bayesian approach to EEW, and via funding from the USGS ShakeAlert project, the SED group built an operational VS into the emerging Californian EEW prototype system (Böse et al. 2013). This approach has also been operating as a test system in Switzerland since 2008 (Cua et al. 2009).
The VS magnitude relationships are derived using a Southern Californian dataset augmented with strong motion from Next Generation Attenuation Relationships (NGA), and have been shown to work effectively in Switzerland and more recently in other networks exhibiting shallow crustal seismicity (Behr et al. 2016). A key advantage of this method is that the station magnitude estimates are evolutionary—using the entire waveform available at a given time and not just the first few seconds. This means that source parameter estimates are updated with new data every second even if no new P-wave detections have been recorded.
In 2013, VS was included as a set of independent modules in the open source and widely distributed SeisComP3 (SC3, Hanka et al. 2010; Olivieri and Clinton 2012) earthquake monitoring software, embedding an EEW algorithm in the same system many seismic networks are using as their daily monitoring system (Behr et al. 2015, 2016). This solution is named VS(SC3).
Recent work within the group has focused on two main areas. The first direction targets improving EEW for the events where EEW is most frequently required—moderate earthquakes where ground motions are limited to the epicentral area. Here speed is key. We develop approaches that reduce the region where no alerts are possible, effectively, this requires optimising the information available at the earliest times—when only very short snippets of data are available at one of more stations. By taking advantage of a set of narrow filterbands that span a very wide frequency range, the Gutenberg Algorithm (Meier et al. 2015) can provide magnitude and distance estimates from only 0.5 s of data at a single station. Solutions are constantly updated, incorporating any available snippets of new data, and as it is a probabilistic approach, it can be combined with magnitude and distance estimates from additional stations, available prior information, or indeed information from other EEW systems. This algorithm is currently being included in both SC3 and ShakeAlert systems.
The second direction targets larger, rare events with long fault lengths, where traditional EEW methods based on point source assumptions break down and EEW magnitudes tend to underestimate the true magnitude. Here accurate source characterisation is key. The FinDer algorithm (Böse et al. 2012), matches evolving peak accelerations across the network with predicted shaking for finite fault models to estimate not only a magnitude that accounts for the finite fault, but also the orientation and extent of the finite fault. This method is already included in ShakeAlert (Böse et al. 2015) and is being included in SC3.
The group have also developed the Earthquake Early Warning Display (EEWD, Cauzzi et al. 2016a, b, this issue), an open-source, freely available java tool that displays real-time alerts on a map, counting down to the arrival of strong motion at a given target site, and also displaying various parameters of the predicted ground motion. A map showing predicted shaking levels for the region is also available. The EEWD is guided by the successful development of the Caltech UserDisplay within the ShakeAlert program. The EEWD can receive alerts from any algorithm that provides information in the standard QuakeML format—currently VS(SC3) and PRESTo.
3 Operational earthquake early warning systems in Europe
3.1 Istanbul
Istanbul has a long history of damaging earthquakes, with the North Anatolian Fault lying just 15 km south of the city in the Sea of Marmara (see Fig. 3). Ambraseys and Finkel (1991) reported 32 damaging earthquakes in the wider Marmara sea region that affected Istanbul between 4th and 19th centuries. Historical catalogues for the region (Ambraseys and White 1997; Guidoboni et al. 1994; Tan et al. 2008) indicate that the city has been exposed to a moderate earthquake approximately every 50 years and a severe seismic event almost every 300 years. After the 1999 series of seismic events that included the M7.4 Kocaeli earthquake, Parsons et al. (2000), taking into consideration stress transfer in the region, showed that the probability of occurrence of the next devastating earthquake in the Marmara Sea is 60 % in the following 30 years.

Seismic stations contributing to EEW operated by KOERI. The 15 stations contributing to the IEEWS are indicated as IEEW Stations and OBO Stations. Both surface and Marmara sea bottom stations are located as close as possible to the western extent of North Anatolian Fault. ‘OBO’ indicates Ocean Bottom Observatory. ‘OBO Land’ are points on land where sea floor OBO stations are connected by cable. Stations indicated as broad-band and SGM (strong ground motion accelerometers) contribute to the KOERI Marmara regional seismic network stations used for the regional EW algorithms VS and PRESTo
In order to be prepared for the potential devastating earthquake in Istanbul, the IEEWS (Istanbul earthquake early warning system) has been deployed in 2002 by Kandilli Observatory and the Earthquake Research Institute (KOERI) with 10 on-land strong motion stations located as close as possible to the main Marmara Fault line (Erdik et al. 2003). The system was upgraded in 2013 to include an additional 5 strong motion stations located on the Marmara Sea bottom. The locations of these 15 stations are shown in Fig. 3.
Due to the complex segmentation of the Marmara fault line and its short distance to the city, a simple and robust earthquake early warning algorithm depending on the exceedance of threshold levels was implemented for the IEEWS. The current system has 3 alarm levels with threshold values of 20, 50 and 100 mg. In order to trigger, the system requires at least 3 stations to exceed the threshold level in a 5 s time interval. Böse (2006) stochastically simulated 280 earthquake scenarios in Marmara Sea between M4.5 to M7.5 and found that the average early warning time ranges from 8 to 15 s depending on the source location of the event. The system does not compute real-time location and magnitude, but simply sends notification that strong motion is on-going within the network.
The data transmission between the remote stations and the processing hub at KOERI is provided by fiber optic cable with a satellite system for redundancy. The data transmission time from the remote stations to the KOERI data center is a few milliseconds through fiber optic lines and less than a second via satellites. The continuous on-line data from these stations is processed at the hub and subsequent alerts of emerging potentially disastrous ground motions provide real-time warning to the critical infrastructures so shut-off mechanisms may be activated before the damaging waves reach the site.
Currently, there is no public alert given by the IEEWS. The EEW alert is actively used only by the Istanbul Natural Gas Distribution Company (IGDAS) and Marmaray Tube Tunnel (Zulfikar et al. 2014) in order to activate automatic shut-off systems in these facilities. Both end users also operate their own network with strong motion stations co-located at high-pressure district gas regulators in the case of IGDAS, and spaced along the tunnel in the case of Marmaray. For IGDAS, the gas flow is automatically stopped at the level of the district regulators following IEEWS alerts and the exceedance of ground motion parameter threshold levels at the local site. Local threshold levels are individually set depending on the local building stock. The Turkish State Railways (TCDD) operates the Marmaray Tube Tunnel. Train operation within the newly constructed 1.4 km long tunnel under the Bosphorus, connecting the European and Asian sides of the city, can be halted based on a combination of the IEEWS EEW alerts and a local threshold exceedance recorded by their 26 tunnel sensors. Although IEEWS alerts have been transmitted to these critical structures in recent seismic events such as 13/08/2015 M3.8 Yalova and 16/11/2015 M4.2 Marmara Sea, no action has been taken since the local threshold levels were not exceeded.
In addition to IEEWS, the regional EEW algorithms VS(SC3) and PRESTo have been also implemented in KOERI within the REAKT project. These applications use the Marmara regional seismic network of KOERI also shown in Fig. 3, which presently includes 40 broadband and 30 strong motion seismic stations. On 24 May 2014, the M6.9 Northern Aegean earthquake, 350 km from Istanbul, was strongly felt across high rise buildings in Istanbul, and was correctly characterised by VS(SC3) within the 36 s of the origin time. Currently, the PRESTo algorithm monitors 18 of the regional network strong motion stations. Scenario studies for several seismic events including the 1999 M7.4 Kocaeli Earthquake indicate that a repeat of this event would provide around 11 s early warning time for Istanbul city. It is planned to increase the number of stations including the broadband stations being used by PRESTo. The regional EEW VS(SC3) and PRESTo algorithms are not integrated with the existing IEEWS. With the current configuration, VS(SC3) and PRESTo systems would not provide warning in Istanbul in advance of strong motions for near-source seismic events such as in the Marmara Sea. However, the regional EWS is intended to be integrated alongside the threshold based IEEWS to provide warning for distant events, which might be critical for the tall buildings and long span bridge structures. The M6.9 Northern Aegean Earthquake demonstrated the relevance of integrating regional and threshold-based approaches.
In addition to the threshold-based IEEWS and regional EWS algorithms, there are also on-site structural monitoring activities of historical buildings, high-rise buildings and suspension bridges in Istanbul. Currently, these activities are not integrated with the early warning efforts.
3.2 Romania
The Vrancea region in central Romania is a major source of seismic hazard in Europe, especially for Romania and neighboring regions in Bulgaria, Serbia and the Republic of Moldavia. Like most of Europe north of the Eurasian–African collision zone, earthquakes in the Carpathian–Pannonian region are confined to the crust. The exception is the Vrancea zone, where earthquakes with focal depth down to 200 km occur. Bucharest, the Romanian capital with a population over 2 million, is situated between 140 and 170 km distance from these intermediate-depth Vrancea epicenters, and has a long history suffering from damaging ground motions—4 intermediate depth events with magnitude between M6.9 and M7.7 occurred between 1940 and 1990 (http://www.infp.ro/wp-content/uploads/2015/12/romplus.cat_.txt). The most devastating of these recent major events was the M7.2 event on 4/4/1977 that caused more then 1500 casualties nationwide, the vast majority in Bucharest, and induced the collapse of 36 buildings of between 8 and 12 stories, while more than 150 old buildings were seriously damaged.
The National Institute for Earth Physics (NIEP) runs EWS, an EEW system that targets seismicity emanating from the Vrancea area primarily in order to provide warning for Bucharest. NIEP also operates the real-time national seismic network. Development of EWS started in 2002, and the initial network consisted of only three strong motion stations in the Vrancea region. It was difficult to ensure the three stations were always functional, and as all stations were required for EWS, it was a major challenge to keep the system operational. There are currently more than 30 strong motion stations in Vrancea included in the EWS system. The EWS system is based on (1) an acceleration threshold level being reached for a minimum of 3 strong motion stations directly above the seismogenic zone and (2) a validation algorithm designed to identify deep Vrancea events. As intermediate depth events originating in Vrancea area will produce impulsive P-wave triggers with very small time differences at the surface station in the epicentral region, the validation mechanism currently requires at least 9 Vrancea-region stations to trigger within a time window of 2–3 s. The system was upgraded in 2007 to include an earthquake magnitude assessment, though without computing a location for earthquakes. In this period the EWS system had a high threshold and only sent a single alert for a M5.5 event (Marmureanu et al. 2010).
In 2013 NIEP included PRESTo in addition to the previously existing methodology and now issues alerts for earthquakes with magnitude M > 4.0. The system still exclusively targets the Vrancea seismic zone. Currently, PRESTo computes an initial magnitude and location and the secondary system validates the event and provides a second magnitude estimate. The secondary system uses the same algorithm implemented in 2007 (Marmureanu et al. 2010), validating that the event is deep and estimating magnitude from 3 strong motion stations (MLR-Muntele Rosu station, VRI-Vrancioaia Station and PLOR-Plostina station). If one of the three main stations is not available, another station is automatically selected. The secondary system rejects earthquakes originating from other seismic zones in Romania. For the target deep earthquakes, the delay caused by communication and rapid estimation of location and magnitude is around 4–5 s after arrival of the first P-wave. The current system is able to provide between 25 and 31 s theoretical warning time for Bucharest, depending on the depth of the event. This system has issued 19 alerts since 2013, including the successful estimation of the location and magnitude for a shallow M5.7 Vrancea event (depth 39 km) on 11/11/2014, with a warning time for Bucharest of only 17 s. For all the other 18 alert notifications the lead time for Bucharest was always larger than 22 s. Up to now there have only been two false alerts: one was produced during a playback simulation of a previous earthquake and the other false alert was issued for a strong event outside Romania, an event that was widely felt in Bucharest. For all the alert notifications the magnitude error between initial EEW estimation is <0.2 magnitude units compared to the manual solution.
There are a number of key end users who receive EEW notifications. Currently the alert is sent by SMS and email to more than 150 official people from emergency response agencies in Romania through a SMS/email governmental gateway. In Romania, the SMS recipients can expect a delay of 4–5 s even in good conditions. SMS is not considered the final solution for critical end-users, and other communications solutions continue to be explored. Alert notifications via more rapid and reliable UPD or Modbus systems are sent to 16 dedicated early warning receivers located at the emergency response units located in Bulgaria and Romania. Key facilities that trigger action upon receipt of the alerts include a Nuclear Research Institute in Bucharest, where following an alert, a nuclear source used for sterilization is automatically secured; the Basarab Bridge, Bucharest, where traffic lights stop cars entering the bridge; and the Vidaru Dam, Romania, where an alert is simply used to trigger data collection. NIEP is currently testing the communication performance with a restricted group of people with a view to releasing a set of mobile applications that will be freely available for general users.
4 Testing and developing EEW in the European–Mediterranean region
4.1 Israel
In 2012, an international advisory committee on earthquake early warning was formed by the Earth and Marine Research Administration (EMRA), Ministry of Energy and Water Resources of Israel, and assembled in Jerusalem to prepare a report outlining an optimal design and implementation plan for a nation-wide earthquake early warning system. The main goal of the EEW system is to provide early warning to schools for the entire Israeli territory.
The committee advised that an EEW system in Israel should be based on a modern dense seismic network capable of issuing an optimal early warning message for the entire territory of Israel. This new seismic system should build on the existing monitoring network (ISN, Israeli Seismic Network) in order to optimise the long-term operability of the system.
Two types of approaches to earthquake early warning have been proposed. Given the seismic hazard is dominated by the Dead Sea and Carmel fault systems, one solution is based on exceedance of S-wave thresholds using a dense station set along these faults, triggering alerts when two or more seismic stations observe ground shaking above a pre-defined strong shaking metric. The advantage of this approach is simplicity and the potential use of cheap low-quality accelerometers, but, depending on the selected thresholds, the probability of false alarms can be relatively high, and testing of the system during the calibration phase difficult. The second approach is a regional P-wave based earthquake detection, requiring higher quality equipment, but allowing for location/magnitude-based specific alerts and regular testing through the recording of small earthquakes.
The committee recommended a hybrid approach for Israel by prioritising the densification and upgrade of the national seismic network, requiring high-quality hardware investment for a P-wave based system, and supporting an initial S-wave-based threshold method at a little additional cost. High quality seismic instrumentation is proposed to be installed along the Dead Sea and Carmel Faults, with multi-component stations equipped with accelerometers and broadband velocity sensors. The seismic network management software should be made operational at a network control center where an open-source community-supported earthquake monitoring system will collect data from all seismic sites and perform real-time event characterization and alerting.
In 2014, as a follow-up of the advisory committee report, the Israeli government started the call procedures for an international tender to construct a nation-wide earthquake early warning system for Israel. The system will be operated by the Geological Survey of Israel, which is under the auspices of the Energy and Water Resources Ministry. The plan calls for building 120–150 stations with broadband-accelerometer sensors along the country’s main faults—the Dead Sea and the Carmel. Different regional early warning methods will be implemented and run in parallel at the central data acquisition system and a decision-module software platform will manage the different outputs to issue the alert message.
In addition to the nationwide system, the Ministry of Education has already installed on-site (low-cost) warning systems in 350 schools with the final objective to instrument the remaining 1600 schools built before 1980, the date at which regulations requiring schools to be built to resist earthquakes was enacted. How the two early warning systems will be linked and communicate with each other is to be explored and verified during the testing phase.
4.2 Italy
Real-time experimentation and testing of PRESTo on the data streams of the Irpinia Seismic Network started in 2009, producing a bulletin of more than a hundred low-magnitude events per year (http://isnet.fisica.unina.it). PRESTo is currently under testing in Southern Italy using data streaming of small-to-moderate events from the ISNet network.
During the last 5 years only 2 < M < 3.7 events have been recorded and real-time processed by the ISNet and the PRESTo system. By excluding a small number of false events related to storms, teleseismic earthquakes or occurring at the network borders, the event detection performance of the EWS shows 94 % of successes, 5 % of false alarms (the first predicted magnitude was M0.5 higher than the bulletin value) and 1 % of missed alarms (the first predicted magnitude was M0.5 lower than bulletin value). The distribution of times of the first alert relative to the first P-pick has a peaked form with median value at 4–5 s. The analysis of errors on magnitude and location for successfully detected events gives uncertainties smaller than 0.5 in magnitude and 7 km in distance, when comparing first PRESTo estimates to the bulletin values.
The real-time data streaming and output messages from the PRESTo system running on the ISNET network have been collected and analyzed at the operating room of the Department of Civil Protection in Rome during a 3-year prototype experimentation carried in the period 2010–2013. Only events with M < 3 have been recorded during this experimentation phase. After the experimentation, and independently of its results, the Department of Civil Protection in Italy decided not to pursue further EEW development at the national scale, considering the real-time seismic monitoring and alert to have lower priority than other earthquake risk mitigation actions, such as the reduction of the vulnerability of strategic building and infrastructures or education and information to populations living in high seismic hazard areas of the country.
In addition to the real-time application at ISNet in southern Italy, another recent on-line experimentation started in early 2014 for the seismic region between the NE Italy (Friuli-Venezia Giulia, Trentino-Alto Adige and Veneto), Austria (Tyrol, Carinthia) and Slovenia. Data are in this case gathered from a trans-national network composed of stations operated by OGS (Istituto Nazionale di Oceanografia e di Geofisica Sperimentale) in Italy, the Agencija Republike Slovenije za Okolje (ARSO) in Slovenia, the Zentralanstalt für Meteorologie und Geodynamik (ZAMG) in Austria and the Università di Trieste (UniTS). Moreover, a feasibility study of a nation-wide Early Warning System in Italy using the National Accelerometric Network (RAN) managed by the Italian Department of Civil Protection and PRESTo is in progress.
4.3 Switzerland
The EEW prototype in Switzerland has been continuously operational since 2008. In 2013, the prototype system migrated from a standalone Earthworm–based system to the current VS(SC3) system. The performance has been described in various publications (Behr et al. 2016). Since the VS(SC3) demonstration system is connected to the same system that is monitoring the national seismicity of the country, it is well maintained and robust, and uses all available strong motion and weak motion sensors. Also, VS event detections and the first locations use the same SC3 modules as the seismic network configured to detect all possible events, so VS solutions are available for events down to M1.0 and the EEW system is frequently activated. Once an event is triggered, VS location and magnitude information is updated every second to take into account the most current set of stations and waveforms. A set of quality criteria is applied to both location and magnitude information to determine whether each magnitude and location should be disseminated. A comprehensive study into delays for all alerts are described in Behr et al. (2016).
Though there is no official end user that takes any decisions based on the warnings, swissnuclear monitors the EEWD connected to VS(SC3) (Cauzzi et al. 2016b).
4.4 REAKT partners
Through the REAKT project, and number of seismic monitoring agencies across Europe have installed and tested VS(SC3). These include University of Patras, Greece; KOERI, Turkey; NIEP, Romania; Iceland Meteorological Office, Iceland. Behr et al. (2016) summarizes the performance, where real-time performance over more than a year is augmented with off-line analysis. Many of these networks continue to operate VS(SC3) and also use the EEWD.
As mentioned in the Sect. 3, PRESTo is also being used in Turkey and Romania., In Turkey, it has been tested offline and under real-time testing since early 2014 using stations around the Marmara Sea from the KOERI network. In Romania, it is part of the operational system.
Though not part of Europe, in the Caribbean a feasibility study for EEW was conducted by REAKT partners (Zuccolo et al. 2016).
4.5 Spain
Feasibility studies have been taken place in Spain. During the last 5 years a series of research projects (ALERT-ES) funded by the Ministerio de Educación y Ciencia have have investigated the feasibility and potential performance of an EEW system for the south Iberia peninsula. The south of the Iberian Peninsula is a region in which large, damaging earthquakes occurred off-shore in the Atlantic Ocean and Mediterrranean sea in the last centuries with relatively long recurrence times. The largest recorded earthquake in the region is the great 1755 Lisbon earthquake (intensity Imax = X) which occurred SW of San Vicente Cape (SW Iberian Peninsula). With the aim of investigating the feasibility of EEW in this region of the Iberian Peninsula, empirical scaling relationships between various early warning parameters and the earthquake size and/or its potential damaging effects for this region have been derived by Carranza et al. (2013). The present distribution of real-time, broadband stations in SW Iberia is very sparse and provides a poor azimuthal coverage thus making an early and reliable location of the off-shore earthquake epicenter and depth difficult to obtain. The authors suggested that a P-wave, threshold-based method based upon a front-detection approach, would allow to rapidly assess the potential damaging effects of offshore earthuqkes by the realtime analysis of data from coastal stations without any need for accurate estimation of the earthquake’s location.
Pazos et al. (2015) investigated the feasibility of a regional (or network based) approach for EEW at South Iberia, considering potentially damaging earthquakes that can occur in the Cape of San Vicente and Gulf of Cadiz area, located in the south west of the Iberian Peninsula. The waveforms of four events, located close to the epicenters of the largest earthquakes in the area, were have been played-back into different seismic software packages (Earthworm, SeisComP3, and PRESTo) to evaluate the uncertainties in location, magnitude estimations, the size of the blind zone and available lead-times at several cities in Portugal and Spain.
Auclair et al. (2014) have also performed a feasibility study for EEW in the Pyrenees.
Despite this long-standing continuous research effort there is no plan for a future implementation of an EEW system in south Iberia or the Pyrenees, both sites would require trans-national cooperation and funding for the deployment of an EEW-capable real-time monitoring and data communication infrastructure.
5 Comments on the future of EEW in Europe
Building operational EEW systems in Europe is challenging. The diffuse and complicated seismicity affects multiple (often small) nations with different cultures, wealth, and attitudes to seismic risk. Building private and public support for the funding of operational EEW systems in Europe is ultimately dependent on each individual country. The national interest in such a system is strongly dependent on the role of civil defense, the education of the public and authorities with respect to seismic hazards, the expectation of potential end users, and the capability of the end users or government to adequately fund such a system.
In this report, we have focused more on technical and seismological issues, which are critical initial prerequisites towards an implementation and operation of EEW. Due to the nature of the EEW community in Europe, and the limited capabilities of small seismic networks and research groups, building effective EEW in Europe requires good coordination across the research community and sharing of resources. Target sites for EEW in Europe include some of the most challenging scenarios for providing EEW—large finite fault sources in Turkey; deep and shallow seismicity in Romania and Greece; and across much of Italy and Greece the main seismic hazard comes from moderate ~M6 earthquakes occurring right below urban centers (such as the 2009 L’Aquila earthquake). Simple systems can be built to target a single source type, but a more appropriate EEW strategy would incorporate multiple algorithms with particular strengths focusing on speed or accuracy, using various sensor types and numbers, and tailored to different magnitudes.
In the long run, this type of modular approach does play to the strengths of Europe, where research groups focus on building open-source algorithms, and have a long history of willingness to coordinate over research and software. A good example of this collaborative approach is the aforementioned EEW display tool, EEWD, built in REAKT.
In terms of instrument development, recent technological developments have facilitated groups to design instrument systems that target applications for both structural health monitoring and on-site earthquake early warning. This would overcome the need to use different kind of instruments in order to cover such different tasks.
Engaging end-users and understanding their needs is a crucial component of developing a successful EEW system—lessons learnt in this respect are the focus of this REAKT special issue. REAKT provided funds to explore the potential of EEW with a variety of end users across many European nations. In this report we have highlighted how different nations have followed different paths. For example in Switzerland, a national demonstration EEW system has been operational since 2006, though serious engagement with end users has only recently begun through the REAKT framework (e.g. swissnuclear). In Italy, a regional demonstration system is operational since 2009 in the Irpinia region and a prototype EEW system has been installed in selected schools within REAKT. At the national level, civil defense authorities, certainly influenced by the fallout from L’Aquila, have decided not to pursue EEW in the short term despite a trial feasibility period in south Italy. On the other hand, clear end-user needs in Istanbul and Romania have driven the implementation of operational EEW systems. In Israel, a different approach is being followed, where the government has directly identified the need for EEW, and is building up a monitoring framework to provide it, with target end users being the national school system.
Europe can benefit from developing a common understanding of best methods to engage private partners and public for building operational EEW. REAKT has provided a strong first step for encouraging partners to explore a wide array of end users, share success, and confront challenges. An efficient approach for developing individual approaches to EEW benefits from the collective experience. It is likely that future EEW systems across Europe will at least partly replicate these first examples existing in Europe in terms of end user engagement, and in terms of algorithms will leverage the community solutions developed at major universities, though there is a definitive need to tailor any EEW system to local needs and experience.
A major issue facing core developments and coordination of EEW groups in Europe is the issue of short duration centralised funding from the European Commission (EC). REAKT has built on SAFER and other 3–4 year EC-funded projects that have had some focus on EEW, but following each cycle there are some years without funding. Now that REAKT has concluded, at the European level the EPOS IP project will build an EEW testing framework coordinated by the University of Naples, though currently no funding is available for coordinated scientific development.
European teams though lead the community in terms of making EEW demonstration software available to seismic networks. PRESTo and VS(SC3) are open source. An open-source user display consume EEW messages from any algorithm is also available.
It is inevitable that EEW will continue to be implemented in other regions beyond Japan, Mexico, Romania and Istanbul. Successes in California, Taiwan and China will demonstrate to European nations the potential and value of investing in EEW, and the public will demand it. Europe is becoming ready to provide it.
References
Akkar S, Bommer JJ (2007) Empirical prediction equations for peak ground velocity derived from strong-motions records from Europe and the Middle East. Bull Seismol Soc Am 97(2):511–530. doi:10.1785/0120060141
Allen RM, Gasparini P, Kamigaichi O, Böse M (2009) The status of earthquake warning around the world: an introductory overview. Seismol Res Lett 80(5):682–693
Ambraseys NN, Finkel CF (1991) Long-term seismicity of Istanbul and of the Marmara Sea region. Terra Nova 3:527–539
Ambraseys NN, White D (1997) The seismicity of the eastern Mediterranean region 550-1BC: a re-appraisal. J Earthq Eng 1(4):603–632. doi:10.1080/13632469708962380
Auclair SX, Goula J-A, Jara YC (2014) Feasibility and interest in earthquake early warning systems for areas of moderate seismicity: case study for the PYRENEES. Pure Appl Geophys 172(9):2449–2465. doi:10.1007/s00024-014-0957-x
Behr Y, Clinton J, Kastli P et al (2015) Anatomy of an earthquake early warning (EEW) alert: predicting time delays for an end-to-end EEW system. Seismol Res Lett 86:830–840. doi:10.1785/0220140179
Behr Y, Clinton J, Cauzzi C et al (2016) The virtual seismologist in SeisComP3: a new implementation strategy for earthquake early warning algorithms. Seismol Res Lett 87(2A):363–373. doi:10.1785/0220150235
Bernard P, Zollo A (1989) The Irpinia (Italy) 1980 earthquake: detailed analysis of a complex normal faulting. J Geophys Res 94(B2):1631–1647. doi:10.1029/JB094iB02p01631
Bindi D, Boxberger T, Sagynbek Orunbaev M, Pilz J, Stankiewicz M, Pittore I, Iervolino E, Ellguth S Parolai (2015a) Onsite early-warning system for Bishkek (Kyrgyzstan). Ann Geophys 58(1):S0112
Bindi D, Iervolino I, Parolai S (2015b) Seismic risk assessment aided by wireless sensing units: perspectives from the REAKT project. Submitted for possible publication to BEEE, special issue REAKT
Böse M (2006) Earthquake early warning for Istanbul using artificial neural networks, Ph.D. Thesis, Universitat Karlsruhe
Böse M, Heaton TH, Hauksson E (2012) Real-time finite fault rupture detector (FinDer) for large earthquakes. Geophys J Int 191(2):803–812. doi:10.1111/j.1365-246X.2012.05657.x
Böse M, Allen R, Brown H, Cua G, Fischer M, Hauksson E, Heaton T, Hellweg M, Liukis M, Neuhauser D et al (2013) CISN ShakeAlert—an earthquake early warning demonstration system for California. In: Wenzel F, Zschau J (eds) Early warning for geological disasters—scientific methods and current practice. Springer, Berlin. ISBN 978-3-642-12232-3
Böse M, Felizardo C, Heaton TH (2015) Finite-fault rupture detector (FinDer): going real-time in Californian ShakeAlert warning system. Seismol Res Lett 86:1692–1704. doi:10.1785/0220150154
Boxberger T, Bindi D, Iervolino I, Pittore M, Choiccharelli E, Parolai S (2015) Application of wireless sensing units to seismic risk assessment: perspectives from the REAKT and Sibyl projects. ECGS & ESC/EAEE Joint Workshop: earthquake and induced multi risk early warning and rapid response, abstract. N…, Luxembourg, November 18–20, 2015
Carranza M, Buforn E, Colombelli S, Zollo A (2013) Earthquake early warning for southern Iberia: a P wave threshold-based approach. Geophys Res Lett 40:1–6. doi:10.1002/grl.50903
Cauzzi C, Behr Y, Clinton J et al (2016a) An open-source earthquake early warning display. Seismol Res Lett. doi:10.1785/0220150284
Cauzzi C, Behr Y, Le Guenan T et al (2016b) Earthquake early warning and operational earthquake forecasting as real-time hazard information to mitigate seismic risk at nuclear facilities. BEEE, Spec Issue REAKT. doi:10.1007/s10518-016-9864-0
Cinti FR, Faenza L, Marzocchi W, Montone P (2004) Probability map of the next M ≥ 5.5 earthquakes in Italy. Geochem Geophys Geosyst 5:Q11003. doi:10.1029/2004GC000724
Colombelli S, Amoroso O, Zollo A, Kanamori H (2012) Test of a threshold-based earthquake early warning using Japanese data. Bull Seismol Soc Am 102:1266–1275. doi:10.1785/0120110149
Cua G, Heaton T (2007) The virtual seismologist (VS) method: a Bayesian approach to earthquake early warning. In: Gasparini P, Manfredi G, Zschau J (eds) Earthquake early warning systems. Springer, Berlin, pp 85–132
Cua G, Fischer M, Heaton T, Wiemer S (2009) Real-time performance of the virtual seismologist earthquake early warning algorithm in Southern California. Seismol Res Lett 80:740–747. doi:10.1785/gssrl.80.5.740
Diehl T, Clinton J, Kraft T et al (2014) Earthquakes in Switzerland and surrounding regions during 2013. Swiss J Geosci 107:359–375. doi:10.1007/s00015-014-0171-y
Diehl T, Deichmann N, Clinton J et al (2015) Earthquakes in Switzerland and surrounding regions during 2014. Swiss J Geosci. doi:10.1007/s00015-015-0204-1
Emolo A, Convertito V, Cantore L (2011) Ground-motion predictive equations for low-magnitude earthquakes in the Campania-Lucania area, Southern Italy. J Geophys Eng 8:46–60. doi:10.1088/1742-2132/8/1/007
Erdik M, Fahjan Y, Ozel O, Alcik H, Mert A, Gul M (2003) Istanbul earthquake rapid response and the early warning system. Bull Earthq Eng 1:157–163
Fleming K, Picozzi M, Milkereit C, Kühnlenz F, Lichtbau B, Fisher J, Züfilcar C, Özel O (2009) The self-organissing seismic early warning information network (SOSEWIN). Seismol Res Lett 80(5):755–771
Guidoboni E, Traina G, Comastri A (1994) Catalogue of ancient earthquakes in the Mediterranean area up to the 10th century, Istituto Nazionale di Geofisica
Hanka W, Saul J, Weber B, Becker J, Harjadi P, Fauzi, GITEWS Seismology Group (2010) Real-time earthquake monitoring for tsunami warning in the Indian Ocean and beyond. Nat Hazards Earth Syst Sci 10:2611–2622
Lancieri M, Zollo A (2008) A Bayesian approach to the real time estimation of magnitude from the early P- and S-wave displacement peaks. J Geophys Res 113:B12302. doi:10.1029/2007JB005386
Lomax A, Satriano C, Vassallo M (2012) Automatic picker developments and optimization: FilterPicker—a robust, broadband picker for real-time seismic monitoring and earthquake early-warning. Seismol Res Lett 83:531–540. doi:10.1785/gssrl.83.3.531
Lynch JP, Sundarajan A, Sohn H et al (2004) Embedding actuation functionalities in a wireless structural health monitoring system. In: Proceedings of the 1st international workshop on advanced smart materials and smart structures technology
Marmureanu A, Ionescu C, Cioflan CO (2010) Advanced real-time acquisition of the Vrancea earthquake early warning system. Soil Dyn Earthq Eng. doi:10.1016/J.Soildyn.2010.10.002
Meier M-A, Heaton TH, Clinton J (2015) The Gutenberg Algorithm: evolutionary Bayesian magnitude estimates for earthquake early warning with a filter bank. Bull Seismol Soc Am. doi:10.1785/0120150098
Olivieri M, Clinton J (2012) An almost fair comparison between Earthworm and SeisComp3. Seismol Res Lett 83(4):720–727. doi:10.1785/0220110111
Parolai S, Bindi D, Boxberger T, Milkereit C, Fleming K, Pittore M (2015) On-site early warning and rapid damage forecasting using single stations: outcomes from the REAKT project. Seismol Res Lett 86(5):1393–1404
Parsons T, Toda S, Stein RS, Barka A, Dieterich JH (2000) Heightened odds of large earthquakes near Istanbul: an interaction-based probability calculation. Science 288:661–665
Pazos A, Romeu N, Lozano L, Colom Y, Mesa ML, Goula X, Jara JA, Cantavella JV, Zollo A, Hanka W, Carrilho F (2015) A regional approach for earthquake early warning in South West Iberia: a feasibility study. Bull Seismol Soc Am 105(2A):560–567. doi:10.1785/0120140101
Picozzi M, Milkereit C, Parolai S, Jaeckel K-H, Veit I, Fisher J, Zschau J (2010) GFZ wireless seismic array (GFZ-WISE), a wireless mesh network of seismic sensors: new perspectives for seismic noise array investigations and site monitoring. Sensors 10:3280–3304
Pitilakis K, Karapetrou S, Bindi D, Manakou M et al (2015) EEW and real-time SHM for the AHEPA hospital in Thessaloniki. Submitted to BEEE, special issue REAKT
Satriano C, Lomax A, Zollo A (2008) Real-time evolutionary earthquake location for seismic early warning. Seismol Soc Am, Bull. doi:10.1785/0120050159
Satriano C, Elia L, Martino C, Lancieri M, Zollo A, Iannaccone G (2010) PRESTo, the earthquake early warning system for southern Italy: concepts, capabilities and future perspectives. Earthq Eng, Soil Dyn. doi:10.1016/j.soildyn.2010.06.008
Straser EG, Kiremidjian AS (1998) A modular wireless damage monitoring system for structures, Report no. 128, John A. Blume Earthquake Engineering Center, Stanford University, Palo Alto, CA, USA
Tan O, Tapırdamaz MC, Yörük A (2008) The earthquake catalogues for Turkey. Turk J Earth Sci 17:405–418
Wald DJ, Quitoriano V, Heaton T, Kanamori H (1999) Relationships between peak ground acceleration, peak ground velocity and modified Mercalli intensity in California. Earthq Spectra 15:557–564
Wenzel F, Erdik M, Köhler N, Zschau J, Milkereit C, Picozzi M, Fisher J, Redlich JP, Künlnenz F et al (2014) EDI: the earthquake disaster information system for Marmara Region, Turkey. In: Wnzel F, Zschau J (eds) Early warning for geological disasters. Springer, Berlin Heidelberg, pp 103–116. doi:10.1007/978-3-642-12233-0_6
Westaway R, Jackson J (1984) Surface faulting in the southern Italian Campania–Basilicata earthquake of 23 November 1980. Nature 312:436–438
Woessner J, Danciu L, Giardini D, Crowley H, Cotton F, Grünthal G, Valensise G, Arvidsson R, Basili R, Demircioglu MN, Hiemer S, Meletti C, Musson RW, Rovida AN, Sesetyan K, Stucchi M, the SHARE consortium (2015) The 2013 European Seismic Hazard Model: key components and results. Earthq Eng, Bull. doi:10.1007/s10518-015-9795-1
Zollo A, Amoroso O, Lancieri M, Wu YM, Kanamori H (2010) A threshold-based earthquake early warning using dense accelerometer networks. Geophys J Int 183:963–974
Zuccolo E, Gibbs T, Lai CG, Latchman JL, Salazar W, Di Sarno L, Farrell A, Lynch L, Workman A (2016) Earthquake early warning scenarios at critical facilities in the Eastern Caribbean. Bull Earthq Eng. doi:10.1007/s10518-016-9878-7
Zulfikar C, Pinar A, Tunc S, Safak E, Erdik M (2014) Istanbul earthquake early warning and rapid response system: real-time earthquake risk mitigation of infrastructures. In: The 14th Japan earthquake engineering symposium
Acknowledgments
The EEW efforts described in this paper were partly carried out within REAKT with funding from the European Commission’s Seventh Framework Programme [FP7/2007–2013] under Grant Agreement No. 282862. We thank Carlo Cauzzi, Yannik Behr, Dino Bindi and Maren Boese for their advice and comments on preparing the manuscript. Two anonymous reviewers provided thoughtful comments that improved the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Clinton, J., Zollo, A., Marmureanu, A. et al. State-of-the art and future of earthquake early warning in the European region. Bull Earthquake Eng 14, 2441–2458 (2016). https://doi.org/10.1007/s10518-016-9922-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-016-9922-7