
Abstract
The paper deals with the stability of a uniformly rotating finite mass consisting of two immiscible viscous incompressible fluids with unknown interface and exterior free boundary. Capillary forces act on both surfaces. The proof of stability is based on the analysis of an evolutionary problem for small perturbations of the equilibrium state of a rotating two-phase fluid. It is proved that for small initial data and small angular velocity, as well as the positivity of the second variation of energy functional, the perturbation of the axisymmetric equilibrium figure exponentially tends to zero as \(t\rightarrow \infty \), the motion of the drop going over to the rotation of the liquid mass as a rigid body.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The problem on an isolated liquid mass rotating about a fixed axis as a rigid body was treated by many outstanding mathematicians such as Newton, Maclaurin, Jacobi, Kovalevskaya, Lyapunov [1, 2], Poincarè [3] and others. Most of them considered self-gravitating rotating fluids but without surface tension.
The famous Plateau experiment raises an interesting mathematical problem of equilibrium figures of a rotating fluid subjected to the capillary forces. In this experiment, one can observe the deformation of a liquid sphere, consisting of oil and rotating in a fluid of the same density, into a torus as the angular velocity increases. The attraction can be completely neglected in this case and the form is determined solely by the rotation and the surface tension of the liquid. Mathematical treatment of this problem was carried out by Globa-Mikhailenko [4], Boussinesq and especially by Charrueau [5, 6]. The latter gave a detailed analysis of the problem, calculated the form of equilibrium figures including the toroidal case and considered some stability aspects. These results were presented in the book of Appell [7]. There one can find reasoning about the dominant effect and calculations of the sizes of rotating liquid masses which are affected by both self-gravity and capillarity. The potential of attraction forces increases in proportion to the square of the dimensions, while the surface tension changes in inverse proportion to the radius of curvature, which, for figures similar to each other, is proportional to the linear dimensions. Therefore, with big masses, the attraction dominates, and the effect of surface tension is negligible. For small masses, on the contrary, the attraction is negligible, and only the surface tension is significant; it is this that restricts the amount of deformation caused by the centrifugal force and determines its limits.
The stability of equilibrium figures is one of the most important their characteristics. The first who used analytical methods for studying the stability and instability of the forms of a rotating fluid mass was Lyapunov [1, 8]. He analyzed the second variation of energy functional with respect to small perturbations of figure boundary. The positivity of this variation guarantees the stability of the system because the energy has a minimum at this state. The Lyapunov method was developed for the case of a rotating capillary fluid by means of an analysis of the corresponding evolutionary free boundary problem in [9, 10].
In the present paper, we extend the above technique to the case of a finite mass of two immiscible liquids and treat stability problem for two rotating incompressible capillary fluids separated by an unknown interface close to the boundary of an equilibrium figure. In addition, we rely on the previously obtained results, in particular, we employ the existence of equilibrium figures for a two-phase liquid [11] and adapt the proof of the global-in-time solvability for a nonlinear two-fluid problem with small data without rotation to our case [12,13,14]. One of the main points is global solvability of a linear problem which is based on the construction of a generalized energy function and a priori exponential energy inequality for a solution. The idea of constructing such a function was formulated and used in the works of M. Padula and one of the authors of the paper [15, 16].
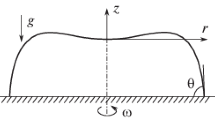
Let two viscous incompressible immiscible fluids of densities \(\rho ^\pm \) and viscosities \(\mu ^\pm \) be contained in a domain \(\Omega _t\subset {\mathbb {R}}^3\) bounded by the free surface \(\Gamma ^-_{t}\) and separated by the variable interface \(\Gamma _{t}^+\). It is assumed that \(\Gamma _{t}^+\) is the boundary of the domain \(\Omega _{t}^+\) filled with a fluid of the density \(\rho ^+\) which is surrounded by another fluid of the density \(\rho ^-\) occupying the domain \(\Omega ^-_{t} =\Omega _t\setminus \overline{\Omega _{t}^+}\). This two-phase drop rotates about the vertical axis \( x_3 \) (see Fig. 1). At the initial instant \( t=0 \), the surfaces \( \Gamma _{0}^-\), \(\Gamma _{0}^+ \) are given. It is necessary to find \(\Gamma ^-_{t}\), \(\Gamma _{t}^+\), as well as velocity vector field \({\varvec{v}} (x,t)\) and pressure function p(x, t) satisfying the interface problem for the Navier–Stokes system
where \({\mathcal {D}}_t=\partial /\partial t\), \(\nabla =(\partial /\partial x_1, \partial /\partial x_2,\partial /\partial x_3)\), \({{\varvec{v}}}_0\) is initial velocity distribution, \({\mathbb {T}} ({\varvec{v}},p )=-p +\mu ^\pm {\mathbb {S}}({\varvec{v}} )\) is stress tensor, \({\mathbb {S}}({\varvec{v}})=(\nabla {\varvec{v}})+(\nabla {\varvec{v}})^T\) is doubled rate-of-strain tensor, the superscript T denotes the transposition, \(\rho ^\pm , \mu ^\pm >0 \) are the step-functions of density and dynamical viscosity equal to \( \rho ^-, \ \mu ^- \) in \(\Omega ^-_{t}\) and \( \rho ^+, \ \mu ^+ \) in \( \Omega _{t}^+ \); \(H^- \), \(H^+ \) are twice the mean curvatures of the surfaces \(\Gamma ^-_{t}\), \( \Gamma _{t}^+ \) \((H^+<0\) at the points where \(\Gamma _{t}^+\) is convex toward \(\Omega _{t}^-\)); \(\sigma ^-,\sigma ^+>0\) are the coefficients of the surface tension on \( \Gamma ^-_{t} \), \(\Gamma _{t}^+ \), respectively; \({\varvec{n}}(x,t)\) is the outward normal to \(\Gamma ^-_{t}\) and \( \Gamma _{t}^+ \), \(V_{{\varvec{n}}}\) is the velocity of evolution of the surfaces \( \Gamma ^-_{t} \) and \( \Gamma _{t}^+ \) in the direction of \({\varvec{n}}\). We suppose that a Cartesian coordinate system \(\{x\}\) is introduced in \({\mathbb {R}}^3\). The centered dot means the Cartesian scalar product.
The summation is implied over the repeated indices from 1 to 3 if they are denoted by Latin letters. We mark the vectors and the vector spaces by boldface letters.
We assume that the domains \( \Omega _0^+ \), \( \Omega _0 \) differ little from equilibrium figures \({\mathcal {F}}^+ \) and \({\mathcal {F}}\) such that
We denote \({\mathcal {F}}^-={\mathcal {F}}\setminus \overline{{\mathcal {F}}^+ }\). Due to the incompressibility of the liquids, equalities (1.2) hold for any \( t>0 \):
It implies the conservation of mass because of constant densities of the fluids. A solution of problem (1.1) also satisfies the other conservation laws for \(t>0\):
where \({\varvec{\eta }}_i(x)={\varvec{e}}_i\times {\varvec{x}},\) \(i=1,2,3\), \(\bar{\rho }\) is the step-function of density equal to \( \rho ^- \) in \({\mathcal {F}}^-\) and \( \rho ^+ \) in \({\mathcal {F}}^+\), \(\delta ^k_i\) is the Kronecker delta; \(\omega \) is the angular velocity of the rotation,
is the angular momentum of the rotating liquids, and \(|x'|^2=x_1^2+x_2^2\). One can prove that (1.4) holds for all \(t>0\) if it is satisfied for \(t=0\) (see [11]).
We introduce \({\mathcal {G}}^+ =\partial {\mathcal {F}}^+ \) and \({\mathcal {G}}^- =\partial {\mathcal {F}}\) (see Fig. 1).

Two-phase drop
Two-phase liquid mass uniformly rotating about the \(x_3\)-axis with constant angular velocity \(\omega =\beta /I_0\) has velocity vector field
and pressure function
where \(\bar{\rho }\), \(p_0^\pm \) are step-functions in \({\mathcal {F}}^\pm \). This motion is governed by the homogeneous steady Navier–Stokes equations
with the step-function \( \bar{\mu }\equiv \mu ^+ \) in \({\mathcal {F}}^+\) and \( \bar{\mu }\equiv \mu ^- \) in \( {\mathcal {F}}^-\). If one substitutes \({{\varvec{{\mathcal {V}}}}}, {\mathcal {P}}\) into the boundary conditions in (1.1), one obtains the equations for the surface \({\mathcal {G}}^-\) of the domain \({\mathcal {F}}\) and for the interface \({\mathcal {G}}^+\) between the fluids
where \({\mathcal {H}}^- \), \({\mathcal {H}}^+ \) are twice the mean curvatures of \( {\mathcal {G}} ^- \), \( {\mathcal {G}}^+ \). In [11] it was proved the existence of the surfaces \({\mathcal {G}}^-\), \({\mathcal {G}}^+ \) satisfying equations (1.5).
We assume the axial symmetry of \({\mathcal {F}}^\pm \) and the symmetry of them about the plane \(x_3=0\); it implies that
Condition (1.6) corresponds to the first relation in (1.4) which means that the barycenter of the liquids coincides with the origin all the time. The other conditions in (1.4), the conservation of momentum and angular one, take the form
It is reasonable to work with the problem for the perturbations of the velocity and pressure
written in the coordinate system rotating about the \(x_3\)-axis with the angular velocity \(\omega \).
We introduce the new coordinates \(\{y_i\}\) and the new unknown functions (\(\tilde{{\varvec{v}}}\), \(\tilde{p}\)) by the formulas
where
We note that
and \({\mathcal {D}}_t{\varvec{v}}_{r}|_{x={\mathcal {Z}}y}={\mathcal {D}}_{t}{\varvec{v}}_r({\mathcal {Z}}y,t) -({\varvec{{\mathcal {V}}}}\cdot \nabla ){\varvec{v}}_r. \) Substituting this in (1.1) and acting by \( {\mathcal {Z}}^{-1} \), we arrive at the free boundary problem for the perturbations of the velocity \(\tilde{{\varvec{v}}} \) and pressure \( \tilde{p}\):
where \(\tilde{\Omega }_t^\pm ={\mathcal {Z}}^{-1}(\omega t)\Omega _t^\pm ,\) \(\tilde{\Gamma }_{t}^\pm ={\mathcal {Z}}^{-1}(\omega t)\Gamma _{t}^\pm \), \(\tilde{{\varvec{n}}} \) is the outward normal to \(\tilde{\Gamma }_{t}\), \({\varvec{n}}= {\mathcal {Z}}\tilde{{\varvec{n}}}\), \(y'=(y_1,y_2,0)\), \( p_{0}^- \), \( p_{0}^+ \) are constants on \(\tilde{\Gamma }_{t}^-\) and \( \tilde{\Gamma }_{t}^+ \), respectively.
The kinematic boundary condition in (1.1)
where \(V_{{\varvec{n}}}\) is the normal velocity of \(\Gamma _t\), is invariant with respect to our transformation. Indeed, let x(t) be a point of \(\Gamma _t\). We have \(V_{{\varvec{n}}}={\mathcal {D}}_t {\varvec{x}}\cdot {\varvec{n}}\), and since \({\mathcal {D}}_t {\varvec{x}} =\omega {\mathcal {D}}_\theta \big |_{\theta =\omega t}{\mathcal {Z}} {\varvec{y}}+{\mathcal {Z}}{\mathcal {D}}_t{\varvec{y}}\), \({\mathcal {Z}}^T={\mathcal {Z}}^{-1}\), then \({\mathcal {D}}_t {\varvec{x}}\cdot {\varvec{n}}=\omega ({\varvec{e}}_3 \times {\varvec{y}})\cdot \tilde{{\varvec{n}}}+{\mathcal {D}}_t {\varvec{y}}\cdot \tilde{{\varvec{n}}}\). On the other hand, \({\varvec{v}}\cdot {\varvec{n}}=\tilde{{\varvec{v}}}\cdot \tilde{{\varvec{n}}}+\omega ({\varvec{e}}_3\times {\varvec{y}})\cdot \tilde{{\varvec{n}}}\). Hence, \({\mathcal {D}}_t {\varvec{y}}\cdot \tilde{{\varvec{n}}}= \tilde{{\varvec{v}}}\cdot \tilde{{\varvec{n}}}\) which means \(\tilde{V}_{\tilde{{\varvec{n}}}}=\tilde{{\varvec{v}}}\cdot \tilde{{\varvec{n}}}\).
Relations (1.3), (1.4), (1.7) go over into
where \({\varvec{\eta }}_i(y)={\varvec{e}}_i\times {\varvec{y}}\), \(i=1,2,3\).
Let us suppose that the surfaces \(\tilde{\Gamma }_{t}^\pm \) can be given by the relations
and we map \(\tilde{\Omega }_{t}^\pm \) on \({\mathcal {F}}^\pm \) by the transformation the inverse of which is
where \({\varvec{N}}^*\) and \(r^*\) are extensions of \({\varvec{N}}\) and r into \({\mathcal {F}}\), respectively.
Due to (1.5), the boundary conditions
in (1.8) are equivalent to ones
Our next goal is to linearize problem (1.8). To this end, we need to compute the first variation with respect to r of the expressions \(H(y)-{\mathcal {H}}(z)\), \(|y'|^2-|z'|^2\), where y is connected with z by the relation (1.11).
We compute the first and second variations of a functional R[r] with respect to r by the formulas
It is clear that
and, according to [17],
where \(\Delta ^\pm \) are the Laplace – Beltrami operators on \({\mathcal {G}} ^\pm \), respectively.
Applying (1.11) and using the above relations, we arrive at the linear problem corresponding to (1.8), (1.12)
where
with \(b^-(z)=\sigma ^-({{\mathcal {H}}^-}^2-2{\mathcal {K}}^-) +\rho ^-\omega ^2{\varvec{N}}\cdot {\varvec{z}}'\), \(b^+(z)=\sigma ^+ ({{\mathcal {H}}^+}^2-2{\mathcal {K}}^+)+[\bar{\rho }] \big |_{{\mathcal {G}}^+}\omega ^2{\varvec{N}}\cdot {\varvec{z}}',\) \({\varvec{z}}'=(z_1,z_2,0)\), \({\mathcal {K}}^\pm \) are the Gaussian curvatures of \( {\mathcal {G}} ^\pm \).
We recall the definition of the Sobolev–Slobodetskiǐ spaces which we use in the present paper. The isotropic space \(W_2^l(\Omega )\), \(\Omega \subset {\mathbb {R}}^n\), is the space with the norm
if \(l=[l]\), i. e., l is an integral number, and
if \(l=[l]+\lambda \), \(\lambda \in (0,1)\). As usual, \({\mathcal {D}}_x^{{\varvec{j}}} u\) denotes a (generalized) partial derivative \(\frac{\partial ^{|{\varvec{j}}|}u}{\partial x_1^{j_1}\ldots \partial x_n^{j_n}}\), where \({\varvec{j}}=(j_1,j_2,\ldots j_n)\) and \(|{\varvec{j}}|=j_1+\cdots +j_n\).
We introduce the anisotropic spaces
\(Q_T=\Omega \times (0,T)\), the squares of norms in these spaces coincide, respectively, with
The space \(W_2^{l,l/2}(Q_T)\equiv W_2^{l,0}(Q_T)\cap W_2^{0, l/2}(Q_T)\) can be supplied with the norm
We will use another equivalent norm in \(W_2^{l,l/2}(Q_T)\) below.
The Sobolev–Slobodetskiǐ spaces of functions given on smooth surfaces, in particular, on \({\mathcal {G}}^\pm \) and on \(G_T^\pm ={\mathcal {G}}^\pm \times (0,T)\), \(T\leqslant \infty \), are introduced in the standard way, with the help of local maps and partition of unity.
Moreover, we introduce also the norm
Finally, we set
2 Linear Problem
An analysis of nonstationary problem with free boundaries for the Navier – Stokes equations (1.8) with initial data close to the regime of rotation of a two-layer fluid as a solid (see Fig. 2) is based on linearisation (1.14).

Two-phase equilibrium figure
We study the following two initial–boundary value problems for the Stokes equations in a given two-phase domain separated by an axisymmetric surface of revolution \( {\mathcal {G}}^+\) and bounded by an axisymmetric surface \( {\mathcal {G}}^- \) with respect to the unknown velocity vector field \( {\varvec{w}} \) and pressure function p:
and
where \( \omega \) is the angular velocity of the rotation, r(x, t) is an unknown function defining the surfaces \( \Gamma ^\pm _ {t} \); \({\varvec{N}} \) is the outward unit normal to \( {\mathcal {G}} ^- \cup {\mathcal {G}} ^+ \); \( {\varvec{f}}, f, {\varvec{d}}, g, \) \( {\varvec{w}}_0, r_0 \) are given functions; the expressions \({\mathcal {B}}^\pm _{0}r\) are defined by (1.15).
We assume that the domains \({\mathcal {F}}^\pm \) are symmetric with respect to \( x_1,x_2,x_3 \), as well as the initial data satisfy, in accordance with the linearization of assumptions (1.9), (1.10), orthogonality conditions
We introduce the notation \(Q_T^\pm ={\mathcal {F}}^\pm \times (0,T)\), \(G_T^\pm ={\mathcal {G}}^\pm \times (0,T)\), \(D_T= Q_T^+\cup Q_T^- \), \(Q_T= Q_T^+\cup \overline{Q_T^-} \), \(G_T= G_T^+\cup G_T^- \).
First, we study homogeneous problem (2.2).
Proposition 2.1
A solution of problem (2.2)–(2.4) satisfies conditions (2.3), (2.4) for all \(t>0\).
Proof
Due to the boundary conditions in (2.2), we have
which implies
Now we integrate the first equation in (2.2) over \({\mathcal {F}}^-\cup \overline{{\mathcal {F}}^+}={\mathcal {F}}\). In view of (2.8), we obtain
Since
equation (2.6) together with initial conditions (2.3), (2.4) can be regarded as a homogeneous Cauchy problem for
and for \(\int _{\mathcal {F}}\bar{\rho } w_3\,\mathrm{d}x\). From the uniqueness of a trivial solution, it follows that \(y_\alpha (t)=0,\) \(\int _{\mathcal {F}}\bar{\rho } w_3(x,t)\,\mathrm{d}x=0,\) which implies \(\int _{\mathcal {F}}\bar{\rho } w_\alpha \,\mathrm{d}x=y'_\alpha (t)=0,\) \(\int _{\mathcal {F}}\bar{\rho } w_3\,\mathrm{d}x=y_3'(t)=0,\) and \(y_3(t)=y_3(0)=0\).
When we multiply the first equation in (2.2) by \({\varvec{\eta }}_j(x)\) and integrate, we get
which can be written as follows
Hence relations (2.4) are valid for all positive t, and the proposition is proved. \(\square \)
Due to momentum conservation law, it is valid the following statement.
Corollary 2.1
There holds the following decomposition
where \({\varvec{w}}^\perp \) is a vector field orthogonal to all the vectors of rigid motion \({\varvec{\eta }} \), i. e.,
and
Proposition 2.2
The following relations hold:
where \({\varvec{\eta }} \) is an arbitrary vector of rigid motion.
Proof
Let \(\Omega _\varepsilon \) be a bounded domain with the boundary \(\Gamma _\varepsilon \), and \({\varvec{n}}_\varepsilon \) be the external normal to \(\Gamma _\varepsilon \). The equality
follows from
which is a consequence of the well-known Weierstrass formula
and from
Next, by \(\Gamma _{\varepsilon }^\pm \) we denote the surfaces given by \(x=y+\varepsilon {\varvec{N}} r\), \(y \in {\mathcal {G}}^\pm \), and \(\Omega ^+_{\varepsilon }\), \(\Omega _{\varepsilon }^-\) mean the domains bounded by the surfaces \(\Gamma ^+_\varepsilon \), \(\Gamma ^+_\varepsilon \cup \Gamma _\varepsilon ^-\) and close to \({\mathcal {F}} ^\pm \), respectively; \(\Omega _\varepsilon =\overline{\Omega ^+_\varepsilon } \cup \Omega _\varepsilon ^- \). Finally, let \({\varvec{N}}^*\) and \(r^*\) be the extensions of \({\varvec{N}}^\pm \) and r into \({\mathcal {F}}\).
We generalize (2.9) on the surfaces \(\Gamma ^\pm _\varepsilon \):
By using equations (1.5) for \({\mathcal {G}}^\pm \), we obtain
where \({\mathbb {L}}_\varepsilon \) is the Jacobi matrix of the (invertible) transformation
\(\widehat{{\mathbb {L}}}_\varepsilon \) is its co-factor matrix.
The first variation of (2.10) leads to
which implies
and
It is true the same for \({\varvec{N}}\cdot {\varvec{e}}_i\) instead of \({\varvec{N}}\cdot {\varvec{\eta }}_i\). In view of the arbitrariness of r, Proposition 2.2 is proved. \(\square \)
Theorem 2.1
(Local Solvability of the Linear Problem). Let \({\mathcal {G}}\in W_2^{3/2+l} \) and \(r_0 \in W_2^{2+l} ({\mathcal {G}})\) with \(l\in (1/2,1).\) For arbitrary \({\varvec{f}} \in {\varvec{W}}_2^{l,l/2}(D_T)\), \(f \in W_2^{1+l,0}(D_T)\), \(f=\nabla \cdot {\varvec{F}}\), \({\varvec{F}}\in {\varvec{W}}_2^{0, 1+\frac{l}{2}}(D_T)\), \([{\varvec{F}}\cdot {{\varvec{N}}}]|_{{\mathcal {G}}}=0\), \({\varvec{w}}_0 \in W_2^{1+l}({\mathcal {F}})\), \({\varvec{d}}= {\varvec{d}}_\tau +d{\varvec{N}}\), \({\varvec{d}}_\tau \in {\varvec{W}}_2^{ l+\frac{1}{2} ,\frac{l}{2}+\frac{1}{4}}(G_T)\), \({\varvec{N}}\cdot {\varvec{d}}_\tau =0 \), \(d\in W_2^{ l+\frac{1}{2},0}(G_T)\cap W_2^{l/2}\big (0,T;W_2^{1/2}({\mathcal {G}})\big )\), \(g\in W_2^{3/2+l ,3/4+l/2}(G_T)\), \(T<\infty \), satisfying compatibility conditions
where \(\Pi _{{\mathcal {G}}}{\varvec{b}}={\varvec{b}}-({\varvec{N}}\cdot {\varvec{b}}){\varvec{N}}\), problem (2.1) has a unique solution \(({\varvec{w}},p, r)\) such that \({\varvec{w}}\in {\varvec{W}}_2^{2+l,1+\frac{l}{2}}(D_T)\), \(p\in {\varvec{W}}_2^{l,\frac{l}{2}}(D_T),\) \(\nabla p\in {\varvec{W}}_2^{l,\frac{l}{2}}(D_T),\) \(r(\cdot ,t)\in W_2^{2+l}({{\mathcal {G}}}) \) for any \( t\in (0,T)\) and
Remark 2.1
From trace theorem for \(\rho \in W_2^{1,1}(G_T),\) it follows that
which implies the inequality
This means that \(\Gamma _t^\pm \in W_2^{2+l}\) for all \(t\in [0,T]\).
Proof
Let \(r_1\) be a function satisfying the conditions
and the estimates
Such \(r_1\) exists due to Proposition 4.1 in [20] and equivalent normalizations of the Sobolev – Slobodetskiǐ spaces.
We can write
Consequently, system (2.1) can be transformed to the form:
where \(d'=d-\sigma {\mathcal {B}}^\pm _0r_1\), \(B'={\mathcal {B}}^\pm _0({\mathcal {D}}_t r_1-g)\), \(\nabla _{\mathcal {G}}\) is the surface gradient on \({\mathcal {G}}^+\); \({\mathbb {S}}{:}{\mathbb {T}}\equiv S_{ij}T_{ij}\). In (2.13), we have used that
(Lemma 10.7 in [18]). Such problems were investigated in [14, 21, 22], where, in particular, the solvability of (2.13) without the terms \(2\omega ({\varvec{e}}_3\times {\varvec{w}}) \) and
and the estimate of its solution
were established. Inequality (2.14) together with (2.12) implies estimate (2.11) because the additional terms are of lower order and have no essential influence on the final result. In addition, in [21, 22], we considered the whole space with a closed interface. We note that the results for bounded domains are similar [14]. Near the outer boundary, one should apply the estimates obtained in [23] for a single liquid of finite volume. \(\square \)
Now we consider homogeneous problem (2.2) with \({\varvec{w}}_0\) and \(r_0 \) satisfying orthogonality conditions (2.3), (2.4). At first, exponentially weighted \(L_2\)-estimates of \( {\varvec{w}}\) and r will be obtained.
Proposition 2.3
Assume that the form
is positive definite, i. e.,
for arbitrary r(x) satisfying (2.3). Then a solution of (2.2)–(2.4) satisfies the inequality
where \(\beta _1,\) \(c>0\) are independent of t.
Proof
In order to prove (2.17), we multiply the first equation in problem (2.2) by \( {\varvec{w}} \) and integrate by parts. As a result, using the boundary conditions and the self-adjointness of the operators \({\mathcal {B}}_0^\pm (r) \), we have energy relations
Making the same but with \({\varvec{W}}\in W_2^1({\mathcal {F}})\) such that
we obtain
Since due to (2.5) \(\int _{{\mathcal {G}}^\pm }r \,\mathrm{d}{\mathcal {G}}=0,\) such \({\varvec{W}}\) exists.
Now we estimate the generalized energy. We multiply (2.19) by small \(\gamma >0\) and add to (2.18), which gives
where
By virtue (2.16), we have
In view of Corollary 2.1, \({\varvec{w}}={\varvec{w}}^\perp +\sum _{i=1}^3d_i(r){\varvec{\eta }}_i(x)\equiv {\varvec{w}}^\perp +{\varvec{w}}'\) and, hence,
where \(\Vert \sqrt{\bar{\rho }}{\varvec{w}}'\Vert ^2_{{\mathcal {F}}} =\sum _{k,j=1}^3d_kd_jS_{kj}=\sum _{j=1}^3 S_{j}d_j^2\), \(S_{kj}=\int _{\mathcal {F}}\bar{\rho } {\varvec{\eta }}_k\cdot {\varvec{\eta }}_j\,\mathrm{d}x \), \(S_j\equiv S_{jj}\), and \(d_j\), \(j=1,2,3, \) are defined by (2.7). It is easily seen that \(\Vert \sqrt{\rho }{\varvec{w}}'\Vert ^2_{{\mathcal {F}}}\) is a positive quadratic form with respect to r. Consequently,
Next, we apply the Korn inequality, valid for the functions orthogonal to all rigid displacement vectors [24],
Then we can use the Poincaré inequality
since
Hence, by the Hölder inequality, for small enough \(\gamma \), we have
with some \( \beta _1>0 \). Consequently,
which implies
and inequality (2.17). \(\square \)
Remark 2.2
We observe that condition (2.16) coincides with the positiveness of the second variation of the potential energy
for given volumes of \( \Omega ^\pm _t \). One can calculate it by (1.13):
(see [9, 11]). Due to equations (1.5), this yields
The nonnegativity of the second variation of the potential G(r) on the subspace of r satisfying orthogonality conditions (2.3) guarantees weak lower semicontinuity of it whence together with the coerciveness of the potential it follows the existence of a minimum. It is clear that the minimum realizes at \(r=0\) which implies the stability of equilibrium figures \({\mathcal {F}}\) and \({\mathcal {F}}^+ \) given by (1.5) that are the Euler equations for the potential G(r) .
This approach corresponds to the variational setting for stability problem of the boundaries \({\mathcal {G}}^\pm \).
Theorem 2.2
(Global Solvability of the Linear Homogeneous Problem). If estimate (2.16) is valid for the functional \( R_0(r) \) defined by (2.15) then problem (2.2) with \({\varvec{w}}_0 \in W_2^{1+l}({\mathcal {F}})\), \(r_0 \in W_2^{2+l}({\mathcal {G}})\), \(l\in (1/2,1)\), satisfying compatibility conditions
and orthogonality conditions (2.3), (2.4), has a unique solution \(({\varvec{w}}, p, r)\) such that \({\varvec{w}}\in {\varvec{W}}_2^{2+l,1+l/2}(D_\infty )\), \(p\in {\varvec{W}}_2^{l,l/2}(D_\infty )\), \(\nabla p\in {\varvec{W}}_2^{l,l/2}(D_\infty )\), \(r(\cdot ,t)\in W_2^{2+l}({\mathcal {G}})\) for any \( t\in (0,\infty )\). This solution is subjected to the inequality
with certain \(\beta >0\) and the constant c independent of T.
For obtaining bounds for higher order norms of the solution similar to (2.17), we invoke a local-in-time estimate of the solution.
Proposition 2.4
Let \(T>2\). The solution of problem (2.2), (2.3), (2.4) is subject to the inequality
where \(2<t_0\leqslant T\), \(D _{t_1,t_2}={\mathcal {F}} \times (t_1,t_2)\), \(Q_{t_1,t_2}=\Omega \times (t_1,t_2)\), \(\Omega =\overline{{\mathcal {F}}^+}\cup {\mathcal {F}}^-\), \(G_{t_1,t_2}= {\mathcal {G}}\times (t_1,t_2)\).
Proof
We fix \(t_0\in (2,T)\) and multiply (2.2) by the cutoff function \(\zeta _\lambda (t)\), smooth, monotone, equal to zero for \(t\leqslant t_0-2+\lambda /2\) and to one for \(t\geqslant t_0-2+\lambda \), where \(\lambda \in (0,1]\), and such that for \(\dot{\zeta }_\lambda (t) \equiv \frac{\mathrm{d}\zeta _\lambda (t)}{\mathrm{d}t}\) and \(\ddot{\zeta }_\lambda (t)\), the inequalities
hold.
Then for \({\varvec{w}}_\lambda ={\varvec{w}}\zeta _\lambda \), \(p_\lambda =p\zeta _\lambda \), \(r_\lambda =r\zeta _\lambda ,\) we obtain
By Theorem 2.1 applied to system (2.23), (2.3), (2.4), estimate (2.11) for \({\varvec{w}}_{\lambda },\) \(p_{\lambda }\), \(r_{\lambda }\) is valid whence it follows that
where \(t_1=t_0-2\).
Now, we apply interpolation inequalities
with \(\varkappa >0 \) which leads to
Here \(\Psi (\lambda )\) denotes the left-hand side in (2.24), \(K=\Vert {\varvec{w}}\Vert _{Q_{t_1,t_0}}+\Vert r\Vert _{G_{t_1,t_0}}\), \(m=3+2l\). Setting \(\varkappa =\delta \lambda \leqslant 1\), we obtain
This implies
if \(c_1\delta ^22^{m+2}<1/2.\) For \(\lambda =1\) this inequality is equivalent to (2.22). \(\square \)
Proof of Theorem 2.2
By Theorem 2.1 and Proposition 2.4, one has
Taking the sum of (2.25) from \(j=0\) to \(j=[T]-2\), we obtain the inequality which implies
where
By adding the estimate
to (2.26), choosing \(\beta <\beta _1\) and making use of (2.17), we arrive at an inequality equivalent to (2.21). \(\square \)
3 The Nonlinear Problem
After transformation (1.11), problem (1.8), (1.12) can be written in the form [13]:
where \({\varvec{u}}(z,t)=\tilde{{\varvec{v}}}\big (e_r(z,t),t\big )\), \({\varvec{u}}_0(z)=\tilde{{\varvec{v}}}\big ( e_{r_0}(z,0),0\big )\), \(q(z,t)=\tilde{p}\big (e_r(z,t),t\big )\),
\({\mathcal {I}} \) is the identity matrix, \({{\mathcal {L}}}\) is the Jacobi matrix of transformation (1.11):
\(\tilde{\nabla }={\mathcal {L}}^{-T}\nabla \) is the transformed gradient \(\nabla _x\) (“T” means transposition),
\(\widetilde{{\mathbb {S}}}(\mathbf{{u}})=\tilde{\nabla }{} \mathbf{{u}} +(\tilde{\nabla }{} \mathbf{{u}})^T\) is the transformed doubled rate-of-strain tensor;
\(\tilde{\Pi }{\varvec{b}}={\varvec{b}}-\tilde{{\varvec{n}}} \cdot {\varvec{b}}\tilde{{\varvec{n}}} \) is the projection of a vector \( {\varvec{b}}\) on the tangent plane to \( \tilde{\Gamma }_t\), \(\nabla _{\mathcal {G}}=\Pi _{\mathcal {G}}\nabla \).
The conditions (1.9), (1.10) can be expressed in terms of r as follows (see [16])
where
Proposition 3.1
For arbitrary numbers \(l^\pm \), vectors \({{\varvec{l}}},{{\varvec{m}}},{{\varvec{M}}}=(M_1,M_2,M_3)\), a function \(f_0\in W_2^{l}({\mathcal {F}})\) and a vector field \({{\varvec{b}}}_0\in W_2^{l+1/2}({ {\mathcal {G}}})\), there exist \(r\in W_2^{2+l}({ {\mathcal {G}}})\) and \({{\varvec{u}}}\in {\varvec{W}}_2^{1+l}({\mathcal {F}})\) satisfying the conditions
and the inequality
Proof
We set
For these functions, relations (3.4) hold if \(\rho ^- C^-+[\bar{\rho }]|_{{\mathcal {G}}^+}C^+=1;\) we put
Next, we construct \({\varvec{u}}_1\) satisfying the equations
where
with some vectors \( {\varvec{K}}^\pm \) defined below. Since
the necessary compatibility conditions
hold and there exists \({\varvec{u}}_1\) satisfying (3.6) and the inequality
From the relations
we can conclude that
if
hence,
Now we find a vector field \({\varvec{u}}_2\) satisfying the relations
Following [13], we set \({\varvec{u}}_2=\)rot\(\mathbf{{\Phi }}(z)\), where \({\varvec{\Phi }}\in W_2^{2+l}({\mathcal {F}} )\),
and we require that
Finally, we define
where \(A\in C_0^\infty ({\mathcal {F}}^-)\), \(\rho ^-\int _{{\mathcal {F}}^-}A(z)\,\mathrm{d}z=\frac{1}{2}\) and
We have \(\int _{\mathcal {F}}\bar{\rho }{\varvec{u}}_3(z) \cdot {\varvec{\eta }}_j(z)\,\mathrm{d}z=\widehat{M}_j\) and
It is easily seen that the function r defined in (3.5) and the vector \({\varvec{u}}={\varvec{u}}_1+{\varvec{u}}_2+{\varvec{u}}_3\) satisfy all the necessary requirements. The proposition is proved. \(\square \)
The main result of the paper is as follows.
Theorem 3.1
(Global Solvability of the Nonlinear Problem). Let \({\varvec{u}}_0 \in W_2^{1+l}({\mathcal {F}})\), \(r_0\in W_2^{2+l}( {\mathcal {G}})\), \(l\in (1/2,1)\). We assume that smallness and compatibility conditions
are satisfied, as well as restrictions (3.3) at \(t=0\) and inequality (2.16) hold.
Then problem (3.1) has a unique solution defined in the infinite time interval \(t>0\) and
with certain \(\alpha >0\).
Proof
We outline the main ideas of the proof.
A solution to (3.1) is sought in the form of the sum
We write conditions (3.3) in the form
and construct the functions \({\varvec{u}}''_0, r''_0\) satisfying the relations (see Proposition 3.1)
Then we set \({\varvec{u}}'_0={\varvec{u}}_0-{\varvec{u}}''_0\), \(r'_0=r_0-r_0''\) and define \(({\varvec{u}}',q',r')\) as a solution to the problem
We note that the initial data \({\varvec{u}}'_0,\,r'_0\) satisfy (2.3), (2.4) and homogeneous compatibility conditions (2.20).
Finally, we find \(({\varvec{u}}'', q'', r'')\) as a solution to the system
We consider restrictions (3.10). If (3.7) holds, then the expressions
and the functions \(f_0=l_2({\varvec{u}}_0,r_0)\), \({\varvec{b}}_0(z)={\varvec{l}}^\pm _{3}({\varvec{u}}_0,r_0)\), \(z\in {\mathcal {G}}^\pm \), satisfy the inequality
Hence,
Moreover, in view of (3.9), (3.10), \({\varvec{u}}'_0, r' _0\) is subject to the necessary conditions
By Theorem 2.2, the solution \(({\varvec{u}}',q',r')\) of problem (3.11) satisfies the inequality
We fix \(T=T_0\) so large that
As for the problem (3.12), it is solved by iterations, as in [13], on the basis of inequality (2.11) and the estimate of nonlinear terms (3.2)
(see also [19]), where
Thus, if \( \varepsilon \) is small enough, we obtain
It follows that
In the case of \(c_2\varepsilon <\theta /2\), due to (3.7), this implies
Inequalities (3.13) allow us to extend the solution \(({\varvec{u}},q,r)\) to the intervals \( (T_0,2T_0), \ldots , (kT_0,(k+1)T_0),\ldots \) up to the infinite interval \(t>0\) by the repeated applications of the obtained local result and to complete the proof of Theorem 3.1, as in [13].
Let us consider the case \(k=1\). Estimate (3.13) means
with \({\varvec{u}}_k={\varvec{u}}(\cdot ,k{T_0})\), \(r_k=r(\cdot ,k{T_0})\). So the problem is solvable in the time interval \((T_0,2T_0)\) and
where \(N_k=N_{kT_0}({\varvec{u}}_k,r_k)\), \(Y_k=Y_{kT_0,(k+1)T_0} \). If the solution is found for \(t<(k+1)T_0\) and the inequalities
are proved, then
Let \(\theta _1>\theta \) (\(\theta _1=\mathrm{e}^{-\alpha T_0}\), \(0<\alpha <\beta \)). We take the sum of (3.14), (3.15) multiplied by \(\theta _1^{-2j}\). This leads to
And, finally, by passing to the limit as \(k\rightarrow \infty \) in the last estimate, we arrive at an inequality equivalent to (3.8). \(\square \)
References
Lyapunov, A.M.: On Stability of Ellipsoidal Shapes of Equilibrium of Revolving Liquid. Editiion of the Academy of Science (1884) (in Russian)
Lyapunov, A.M.: Sur les questions qui appartiennent aux surfaces des figures d’equilibre dérivées des ellopsoïdes. News of the Academy of Science, p. 139 (1916)
Poincaré, H.: Figures d’équilibre d’une mass fliuide. Gautier-Villars, Paris (1902)
Globa-Mikhailenko, B.: Figures ellipsoïdales d’équilibre d’une masse fliuide en rotation quand on tient compte de la pression capillaire, Comptes rendus, 160, 233 (1915)
Charrueau, A.: Ètude d’une masse liquide de révolution homogène, sans pesanteur et à tension superficielle, animée d’une rotation uniforme. Annales scientifiques de l’Ècole Normale supérieure, Serie 3, 43, 129–176 (1926)
Charrueau, A.: Sur les figures d’équilibre relatif d’une masse liquide en rotation à tension superficielle, Comptes rendus, 184, 1418 (1927)
Appell, P.: Figures d’équilibre d’une mass liquide homogène en rotation – Traité de Mécanique rationnelle, T. IV, Fasc. I, 2ème edit., Gautier–Villars, Paris (1932)
Lyapunov, A.M.: On stability of ellipsoidal shapes of equilibrium of revolving liquid. Collected Works. Akad. Nauk SSSR Moscow 3, 5–113 (1959)
Solonnikov, V.A.: On the stability of axially symmetric equilibrium figures of a rotating viscous incompressible fluid. Algebra Anal. 16(2), 120–153 (2004). ([St. Petersburg Math. J. 16(2), 377–400 (2005)])
Solonnikov, V.A.: On problem of stability of equilibrium figures of uniformly rotating viscous incompressible liquid. In: Bardos, C., Fursikov, A.V. (eds.) Instability in Models Connected with Fluid Flows. II, Int. Math. Ser. vol. 7, pp. 189–254. Springer, New York (2008). https://doi.org/10.1007/978-0-387-75219-8
Solonnikov, V.A.: On the problem of non-stationary motion of two viscous incompressible liquids. Problemy Mat. Analiza 34, 103–121 (2006). ([Engl. transl. in J. Math. Sci. 142(1), 1844–1866 (2007)])
Denisova, I.V., Solonnikov, V.A.: \(L_2\)-theory for two incompressible fluids separated by a free interface. Preprint POMI RAN (St. Petersburg Department of Steklov Mathematical Institute of RAS), 12/2017, St. Petersburg, 29 p. (2017)
Denisova, I.V., Solonnikov, V.A.: \(L_2\)-theory for two incompressible fluids separated by a free interface. Topol. Methods Nonlinear Anal. 52, 213–238 (2018). https://doi.org/10.12775/TMNA.2018.019
Denisova, I.V., Solonnikov, V.A.: Motion of a Drop in an Incompressible Fluid, Monograph. Springer, Berlin (2021). https://doi.org/10.1007/978-3-030-70053-9
Padula, M.: On the exponential stability of the rest state of a viscous compressible fluid, J. Math. Fluid Mech. 1, 62–77 (1999)
Solonnikov, V.A.: Estimate of the generalized energy in a free-boundary problem for a viscous incompressible fluid, Zap. Nauchn. Sem. POMI 282, 216–243 (2001)
Blaschke, W.: Vorlesungen über Differentialgeometrie und geometrische Grundlagen von Einsteins Relativitätstheorie. I. Springer, Berlin (1924)
Giusti, E.: Minimal surfaces and functions of bounded variation. In: Borel, A., Moser, J., Yau, S.-T. (eds.) Monographs in Mathematics, vol. 80. Birkhäuser, Boston (1984)
Padula, M., Solonnikov, V.A.: On the local solvability of free boundary problem for the Navier – Stokes equations, Problemy Mat. Analiza, 50, 87–112 (2010)
Solonnikov, V.A.: On the linear problem arising in the study of a free boundary problem for the Navier–Stokes equations. Algebra Anal. 22(6), 235–269 (2010) ([English transl. in St. Petersburg Math. J. 22(6), 1023–1049 (2011)])
Denisova, I.V.: A priori estimates of the solution of a linear time dependent problem connected with the motion of a drop in a fluid medium, Trudy Mat. Inst. Steklov., 188, 3–21 (1990)
Denisova, I.V., Solonnikov, V.A.: Solvability of the linearized problem on the motion of a drop in a liquid flow. Zap. Nauchn. Sem. Leningrad. Otdel. Mat. Inst. Steklov. (LOMI) 171, 53–65 (1989). ([English transl. in J. Soviet Math., 56(2), 2309–2316 (1991)])
Solonnikov, V.A.: On an initial-boundary value problem for the Stokes systems arising in the study of a problem with a free boundary. Trudy Mat. Inst. Steklov., 188, 150–188 (1990)
Solonnikov, V.A.: On non-stationary motion of an isolated mass of a viscous incompressible fluid. Isvestia Acad. Sci. USSR 51(5), 1065–1087 (1987). ([English transl. in Math. USSR-Izv. 31 (2), 381–405 (1988)])
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declares that they have no competing interests
Additional information
Communicated by T. Ozawa.
Dedicated to the 70th anniversary of Professor Yoshihiro Shibata.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is part of the topical collection “Yoshihiro Shibata” edited by Tohru Ozawa. This research has been partially supported by the grant no. 20-01-00397 of the Russian Foundation of Basic Research.
Rights and permissions
About this article

Cite this article
Denisova, I.V., Solonnikov, V.A. Rotation Problem for a Two-Phase Drop. J. Math. Fluid Mech. 24, 40 (2022). https://doi.org/10.1007/s00021-022-00662-x
Accepted:
Published:
DOI: https://doi.org/10.1007/s00021-022-00662-x
Keywords
- Two-phase problem
- Viscous incompressible fluids
- Interface problem
- Navier–Stokes system
- Sobolev–Slobodetskiǐ spaces