
Abstract
This paper presents an analysis of the fully parallel AT traction network using a six conductor transmission line. An equivalent model is derived and simulation models for traction substations, section posts, AT posts, traction networks, and electric locomotives are comprehensively built using RT-plus/Simulink to enhance the practicality of the simulation. Based on these models, a simulation software for electrified railway traction power supply system is developed using vehicle network coupling power flow calculation. The results of the example calculation demonstrate that this method effectively considers the interaction between the train and the traction power supply network, leading to a more accurate reflection of power flow distribution in the traction power supply system. So, the proposed method has significant application value in electrified railway engineering.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
With the advancement of electrified railways, the methods of supplying power have become increasingly diverse [1]. Currently, the fully parallel AT power supply stands out due to its exceptional electrical performance. However, its complex structure and the railway transportation properties pose challenges in accurately calculating the real-time voltage and current fluctuations in the traction network.
Drawing upon the six-conductor transmission line model and taking into account the spatial distribution characteristics of the traction network, this study establishes a unified mathematical model of the traction network. Through this model, the impedance of the traction network can be calculated, thereby improving its overall accuracy [2]. Presently, most literature calculates the power flow of traction power supply systems based on the magnitude of the injected current value of the train under rated operating conditions for a single power supply arm [3, 4]. However, in reality, there is electrical coupling between each power supply arm, and the steel rail, as the main conductor of the traction network, remains uninterrupted along the line.
In order to streamline the power flow calculation algorithm for electrified railway traction power supply systems and enhance the precision of power flow calculations, this paper proposes a power flow calculation method for traction power supply systems based on vehicle network coupling. Compared to existing methods, this method offers several key improvements. Firstly, a comprehensive vehicle network simulation model of a fully parallel AT power supply system was developed, wherein a constant power source locomotive model was implemented to replace the constant current source model. This substitution enables more accurate calculation of the rail potential at the end of the power supply arm. Secondly, a vehicle network coupling method for power flow calculation was introduced, which entails establishing a mechanism for interactive iteration between train simulation and traction network calculation [5]. By taking into account the interaction between the train and the traction power supply network, the proposed method can more precisely reflect the power flow distribution of the traction power supply system.
2 Dynamic Simulation Test of at Traction Network
The real-time simulation platform adopts the smart grid digital simulation system developed by Xu chang Kai pu Research Institute [6]. This system has strong nonlinear waveform processing ability, advanced multithreading technology, and abundant IO resources [7, 8]. It is equipped with a RT Linux system with two parts: hard real-time and program, a 4-core CPU processor, and an 83.33 capable of capturing waveform changes μ Perform parallel computing while conducting real-time analysis of simulation and waveform analysis to ensure compliance with the requirements of power supply capacity simulation evaluation, as shown in Fig. 1.

RT-plus real-time digital simulation test platform
The connection voltage of heavy-duty railway traction substations is usually in three modes: 110kV, 220kV, and 330kV, with 220kV being the most common. According to the actual situation of Zhangtang Railway, the rated voltage of this model is set to 220kV, and other parameters are defaulted, as shown in Fig. 2.

220kV external power supply model
2.1 Model of Traction Transformer and Autotransformer
The traction transformer is an important device in the traction substation. Its main function is to convert the external electric energy into the electric energy required by the electric locomotive through the appropriate wiring mode, and convert the three-phase power grid into electrical indicators including capacity, voltage and current. Most of the traction transformers used in the Tangzhang Heavy haul Railway are of the V/x type, which is not easy to model [9]. However, according to the principle and structure, they can be combined by two single-phase V/v types, as shown in Fig. 3.

Traction transformer model
In the fully parallel AT traction power supply, its strong power supply ability and anti-interference ability mainly come from the AT power supply method, which is the autotransformer. There is no dedicated autotransformer module in MATLAB/Simulink, but it can be converted to a single-phase dual winding transformer based on the working characteristics of the autotransformer. Its high-voltage and low-voltage sides are on the same winding, and the turn ratio is 2:1, as shown in Fig. 4.

Autotransformer model
2.2 Full Parallel at Traction Network Model
The lines of the traction power supply system are different from ordinary power grids, with more types and numbers, and are more complex. There is electromagnetic coupling between each contact line, and the impact of coupling cannot be ignored. To better analyze the mathematical relationship between the contact network, messenger wire, and rail, and to facilitate the construction of a traction network model, the traction network is equivalent to a six conductor model, as shown in Fig. 5.

Sectional view of fully parallel AT traction network
3 Electric Locomotive Model
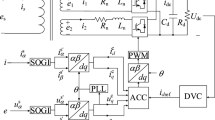
The main circuit model of HXD2B electric locomotive consists of 25kV ideal voltage source, PWM single-phase inverter, three-phase asynchronous motor and its drive inverter [10]. In order to facilitate the analysis of the operation of HXD2B electric locomotive, the main circuit model of HXD2B is built using the digital simulation software RT plus/Simulink, as shown in Fig. 6.

Main circuit model of HXD2B electric locomotive
4 Power Flow Calculation Based on Vehicle Network Coupling
During the operation of a locomotive, its status changes with its position. However, static analysis can be conducted on a specific locomotive at a specific location through model equivalence and locomotive power, and then the voltage of the locomotive can be obtained by iterating the current distribution patterns and parameters of the traction substation, traction network, and locomotive.

Mathematical model diagram of traction power supply system
Mainly including external system power supply, traction transformer impedance, autotransformer impedance, The injection current is divided into locomotive equivalent injection ITR and traction substation equivalent current (Iα, Iβ).
The specific calculation steps are as follows:
Step1: Solve the current vectors of each section shown in Fig. 7.
Divide N sections into three types based on the level of concern: traction substation section Isub, locomotive section Itr, and general line section Iord. Taking single line AT power supply as an example, the current vector is classified in five directions, the current matrix is sequentially divided into contact wire, steel rail, F-line, protection wire, and ground wire from the first column to the last column of the vector. The specific calculation formula is as follows:
Assuming that the required complex power of the locomotive is S*tri and the initial voltage of the locomotive is Utri, the calculation formula for the locomotive traction current can be obtained as
Step 2: Solve the voltage vector.
Using the current vector obtained in Step 1 to form current vector. Using Eqs. (1) to obtain voltage vector.
Step 3: Update the current vector.
According to Step 2, obtain the new voltage value and constant power locomotive model, and obtain the new train current, namely
The resulting new feeder current is
Step 4: Determine whether the voltage of each node converges.
After the current is updated to Ik+1, continue to calculate the new voltage vector Uk+1 according to Eq. (1), and then adjust the iteration error δ Perform calculations.
When the error δ Less than convergence accuracy ε Stop the calculation and set it as the node voltage. Otherwise, return to step 3, which usually requires 6–8 calculations.
5 Example Analysis
Assuming that at a certain moment there are two trains on both the up and down lines, with their speeds and positions shown in Table 1, and both trains operating in traction mode.
Using the calculation method in this article, the power flow distribution of the traction network at that time is obtained as result 1. The traditional traction network power flow calculation simplifies the train to a constant current source, and obtains the power flow result as Method 2. To verify the credibility of the power flow calculation results in this paper, based on the HXD2B train model established in Sect. 1, the AT traction power supply system simulation is conducted at different positions of each train using the RTplus semi physical real-time simulation platform. Compare the results obtained from the above two methods with the simulation results. Obtain the contact line voltage values at the positions of each train, as shown in Table 2.
Table 2 presents the calculation results of two methods and their comparison with RT-plus simulation results. The results confirm that the calculation results of vehicle network coupling are closer to the actual situation, with calculation errors less than 4%. The comprehensive consideration of the interaction between the train and the traction network can more accurately.
6 Conclusions
This article presents a novel method for calculating power flow in traction power supply systems, which is based on vehicle network coupling. By establishing a unified mathematical model for the traction power supply network, with different structures and power supply modes, the proposed method achieves greater accuracy in calculating the rail potential at the end of the power supply arm. Additionally, the proposed method utilizes a mathematical model of parallel static load of induction motors, which is used to determine the injected current of the train at a certain voltage and speed. Based on this, the power flow calculation of the traction power supply system is carried out. To fully consider the interaction between the train and the traction power supply network, an interactive iteration mechanism is established between train simulation and traction network calculation. The proposed method is suitable for digital simulation of railway electrification traction power supply systems and analysis of their impact on the power system. Furthermore, the method has important engineering application value.
References
He, Z.Y., Fang, L., Guo, D., et al.: Algorithm for power flow of electric traction network based on equivalent circuit of AT-fed system [J]. J. Southwest Jiao Tong Univ. 43(2), 1–6 (2008)
Wan, Q., Wu, M., Chen, J., et al.: Simulating calculation of traction substation’s feeder current based on traction calculation [J]. Trans. China Electrotechn. Soc. 22(6), 108–113 (2007)
Cai, Y., Irning, M.R., Case, S.H.: Compound matrix portioning and modification for the solution of branched autotransformer traction feeds. IEE Proceedings; Electric (2003) Prediction of dissolved gas content in transformer oil by grey model. J. Chinese Electric. Eng. 20(3), 65–69 (2003)
Sun, C.X.: A new model of grey prediction parameter model and its application in electrical insulation fault prediction [J]. Control Theory Appl. 20(5), 797–801 (2003)
Sergejs, Z., Poiss, G.: Power transformer mechanical condition assessment with a vibration-based diagnostic method. In: International Scientific Conference on Power and Electrical Engineering of Riga Technical University IEEE, pp. 1–4, (2015)
Sica, F.C., Guimaraes, F.G., Duarte, R.D.O., et al.: A cognitive system for fault prognosis in power transformers [J]. Electr. Power Syst. Res. 127, 109–117 (2015)
Sima, L.P., Shu, N.P., Zuo, J., et al.: Prediction of dissolved gas concentration in transformer oil based on grey correlation and fuzzy support vector machine [J]. Power Syst. Protect. Control 40(19), 41–46 (2012)
Wan, F., Yang, M.L., He, P., et al.: Gas Raman spectrum detection and signal processing method in transformer oil [J]. Chinese J. Sci. Instr. 37(11), 2482–2488 (2016)
Li, Y., Cheng, H.B., Xin, J.B., et al.: GM (1, n) prediction of dissolved gas concentration in transformer oil [J]. J. East China Jiao Tong Univ. 34(3), 131–136 (2017)
Tang, Y.B., Gui, W.H., Peng, T.: Multinuclear principal component regression prediction model for gas in transformer oil [J]. Electr. Mach. Control 16(11), 92–98 (2012)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 Beijing Paike Culture Commu. Co., Ltd.
About this paper

Cite this paper
Li, C.B., Liu, L.P., Liu, Y., Tian, X.J., Song, W., Cao, S. (2024). Power Flow Calculation of Vehicle Network Coupling in Traction Power Supply System. In: Gong, M., Jia, L., Qin, Y., Yang, J., Liu, Z., An, M. (eds) Proceedings of the 6th International Conference on Electrical Engineering and Information Technologies for Rail Transportation (EITRT) 2023. EITRT 2023. Lecture Notes in Electrical Engineering, vol 1138. Springer, Singapore. https://doi.org/10.1007/978-981-99-9319-2_40
Download citation
DOI: https://doi.org/10.1007/978-981-99-9319-2_40
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-9318-5
Online ISBN: 978-981-99-9319-2
eBook Packages: EngineeringEngineering (R0)