
Abstract
Modern power distribution networks are incredibly complex due to the growing incorporation of distributed generators in the past few years. The coordination of Directional Overcurrent Relays (DORs) in interconnected systems with many relays is significantly hindered by this complexity. In a nonlinear and constrained optimization problem, optimal DOR coordination is essential for protecting such complex systems and necessitates rigorous constraints. In order to address the optimal coordination problems of DORs, this study suggests using the Whale Optimisation Algorithm (WOA), a bio-inspired metaheuristic technique. WOA can optimize the fitness function in electrical engineering applications by taking insights from the humpback whales’ hunting strategies. Using various fault data from 3-bus, 9-bus, and 30-bus standard systems, the effectiveness of WOA in promoting optimal DOR coordination is assessed. The main objective is to delineate the implementation of WOA to deal with DOR coordination problems. As a result, we are not comparing WOA's performance against any currently used algorithms. Rather, we use three case studies to test the algorithm's effectiveness with various population sizes and maximum iterations. The outcomes convincingly show that WOA is highly efficient in reducing the total period that primary relays are required to operate.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
When used in combination with fuses, reclosers, and Circuit Breakers (CBs), Overcurrent Relays (OCRs) are a common kind of protection for traditional radial distribution networks. The incorporation of Distributed Generators (DGs) into distribution networks has grown in recent years because of the significant technological, economic, and environmental advantages that DGs provide. The incorporation of DGs, on the other hand, transforms the radial topology of the traditional distribution network into an interconnected framework, leading to bidirectional power flow [1, 2]. A significant influence on the amount of the short-circuit current is exerted by the kind of DG and penetration level of DGs. When it comes to protecting such complex networks quickly and reliably, Directional Overcurrent Relays (DORs) are typically preferred over simple OCRs [3]. In order to improve the overall effectiveness of the protection scheme, DORs must work together in the most efficient manner possible. In transmission and distribution infrastructure, DORs are commonly employed for main protection, and they can also be used to safeguard distance relays in transmission systems as a backup protective device [4, 5].
The DORs might become necessary in order to achieve fault zone differentiation in the ring main, double-end fed, parallel feeder, and multi-looped systems. The primary function of a DOR is to identify a fault as soon as it occurs if it occurs within its operational zone without any intended delay [6]. Primary protection is defined as the identification of a problem inside the specified zone without the use of any intended delay. Occasionally, primary protection neglects to eliminate a problem due to the failure of relays and/or CBs to function properly. It is necessary to have backup protection in place to correct the problem. Backup protection is an extra layer of security offered to a spot that only triggers after an intended delay if the main security of that part neglects to function properly [7]. In the coordination of DORs, the task of determining the most appropriate relay settings, specifically the Time Multiplier Setting (TMS) and the Plug Setting (PS), in such a way that the main relay reacts quicker than any other relays in the system is referred to as coordination. To minimize the overall working time of all primary relays and prevent miscoordination between primary and backup relay pairs, the coordination of DORs must find the optimal TMS and PS values for each relay while taking into consideration specific constraints. In the event of a failure of the main relay or the related circuit breaker, backup relays must be activated after a certain time interval, ensuring that the Primary/Backup (P/B) relay pairs are operated in the correct sequential order [8, 9].
Several ways to achieve the best possible coordination of DORs utilized for the protection of meshed distribution networks have been described in the scientific research literature. For relay coordination, it was common to practice in the past to use trial-and-error approaches [10]. Trial and error procedures, on the other hand, are hampered by the demand for many iterations and the sluggish rate of convergence. Topological modelling was used to provide optimal coordination of DORs, which were later implemented [11, 12]. When contrasted to trial-and-error procedures, topological analysis-based methods specify a minimum number of iterations to arrive at an appropriate solution. Nevertheless, using the topological analysis approach, it is not assured that the global optimal of TMS and PS of DORs would be obtained. In subsequent phases, numerous optimization algorithms for overcoming the coordination challenges of DORs were suggested, with the most prominent programming. Simplex [13], two-phase simplex [14], Sequential Quadratic Programming (SQP) [15], and dual simplex [16] are examples of classical optimization methods that are based on Linear Programming (LP) methods [17]. These approaches are fast and straightforward. However, because the operating time of the DOR is a linear function of the TMS, the LP-based optimization strategies are only useful for optimizing the TMS in this case. Because DOR management is a nonlinear problem, Nonlinear Programming (NLP) methods such as the gradient search technique [18], random search technique, and sequential quadratic programming [19] have been suggested in previous studies to defeat the shortcomings of LP-based approaches. It is possible to tune both the TMS and PS of DORs simultaneously using an NLP-based optimization technique. When it comes to addressing the DOR coordination problem, NLP-based solutions outperform LP techniques by a wide margin. However, both traditional optimization strategies have the potential to become stuck at the local optima and struggle to reach the global optima as a result. Furthermore, as the scale of the system grows, the pace of convergence of such optimization techniques becomes more and slower. As a result, over the last few decades, heuristic methods have emerged as useful tools for solving the relay coordination problem. There are a variety of methods available, including Genetic Algorithm (GA), Particle Swarm Optimization (PSO), Differential Evolutionary (DE) algorithm, Backtracking Search Algorithm (BSA), Artificial Bee Colony (ABC) algorithm, Ant Colony Optimization (ACO), Biogeography-Based Optimization Algorithm (BBOA), Gravitational Search Algorithm (GSA), Teaching Learning-Based Optimization (TLBO), Grey Wolf Optimizer (GWO), Cuckoo Search (CS), and Harmony Search (HS) algorithm [20,21,22,23,24]. For the coordination problem of DORs, hybrid methods are also used to improve computational speed. These methods include GA-LP, GA-NLP, BBOA-LP, GSA-SQP, PSO-SQP, and PSO-GSA. When compared with trial and error, topological, and traditional LP and NLP algorithms, such heuristic and evolutionary optimization algorithms outperform them in terms of reaching the global optimal solution. Most metaheuristic algorithms, on the other hand, need greater computing time and suffer from premature convergence. Researchers have put forth a great amount of effort to date to solve the optimal relay coordination challenges that arise in DOR networks. It seems that practically every time, the primary aim is to improve the relay settings to reduce the total Operating Time (OT) of the relays. However, the challenge of coordination between relays (P/B relay pairs) has not been properly handled so far. As a result, to close the research gap, this paper addresses both objectives, namely, optimization of coordination between P/B relay pairs and relay settings, at the same time and with better results.
Recently, a bio-inspired metaheuristic optimization technique called Whale Optimization Algorithm (WOA) for solving optimization issues was published in [25] and is described in detail. In comparison to other algorithms, WOA is made to balance the exploration and exploitation of the search area, which can improve the convergence rate and overall optimization. It is simpler to develop and utilize for many optimization problems because it only requires a few tuning parameters. It can rapidly reach an equivalent to an ideal solution in a short period due to its strong convergence rate. Compared to other optimization techniques, it is more computationally efficient and relatively simple to implement. It can solve various optimization problems, including those with one or more objectives. In addition, this algorithm is not applied to optimal coordination of directional overcurrent relay optimization problems. This motivated us to select the whale algorithm for the above-said optimization problem. Therefore, this paper uses WOA to provide the best possible coordination of DORs. The recommended algorithm's performance is tested on standard 3-, 9-, and 30-bus test power systems, with faults introduced at the midway of the lines to evaluate its effectiveness. The recommended algorithm's performance is revealed to be an optimal tool in terms of attaining the shortest overall OT of relays.
2 Optimization Problem Formulation
2.1 Objective Function
The problem of DOR can be expressed as either a linear function or a nonlinear function. In the scenario of a linear function, plug-setting has remained constant among the upper and lower bounds of the flow of current while TMS is computed; however, in the scenario of a nonlinear function, both TMS and PS are minimized at the same time in both cases. Apart from that, the quantized characterization of relay configurations increases the difficulty in coordinating the operation of the system. When it comes to solving the DOR's coordination challenge, there are primarily two objectives that must be addressed. The initial aim is to reduce the overall running time of all relays put in the network to the bare minimum, allowing the problem to be addressed in the shortest amount of time. Second, the coordination between the backup and primary relays should be retained, i.e., the backup relay would only act after a specified period if the primary relay could not function properly. The mathematical expression of the relay can be stated as follows [26].
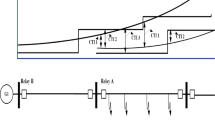
where \({T}_{ik}\) denotes the ith relay operating time for a fault at the kth site, \({I}_{{R}_{i},k}\) denotes the fault current observed in the relay \({R}_{i}\) for a fault at the the kth site, and \({I}_{{\text{f}}}\) denotes the fault current at the Current Transformer (CT) primary terminal. \(P{S}_{i}\) denotes the PG of the relay \({R}_{i}\) above which it begins to operate, while \(TM{S}_{i}\) denotes the TMS of the relay \({R}_{i}\). \(\alpha \), \(\beta \), and \(\delta \) are coefficients that change depending on the characteristics of the relay. According to [26], the values of the parameters are 0.02, 0.14, and 1, respectively, as per IEC Standard 60,255–151 for Inverse Definite Minimum Time (IDMT) relays. \({\text{CT}}_{Rating,P}\) denote the primary rating of the respective CT. The relationship between \({I}_{{R}_{i},k}\) and \(P{S}_{i}\) denotes the factor that determines the degree of nonlinearity. If the fault occurs nearer to the relay, then the fault is called the near-end fault (or close-in fault), and if the fault occurs at another end of the line is called the far-end fault (or far-bus fault), as depicted in Fig. 1.

Schematic of close-in and far-bus faults for relay
The primary objective of coordinating the DORs problem is to find the best TMS and PS values so that the overall weighted sum of all primary relays’ Operation Time (OT) at their related zones is as small as possible. As a result, the objective function can be written as follows [27, 28].
where \({N}_{cl}\) denotes the number of relays responding to a near-end fault and \({N}_{far}\) denotes the number of relays responding to far-end faults.
2.2 Constraints
There are specific limits on how long the relay can operate that must be met for the relay to function properly. To function within the constraints, the TMS and PS should be constrained. The TMS has a boundary requirement that should be met for the relay to operate quickly and correctly. The relay must not cross the bounds. It should function within the TMS's upper (\(ub\)) and lower (\(lb\)) limits. As a result, the ith relay's TMS limit setting can be written as follows:
In this paper, the \(lb\) and \(ub\) values of TMS are chosen to be 0.05 and 1.1, respectively. The relay's PS should be such that it stays quiet when the feeder is receiving peak load current, but it should function when the feeder is experiencing minimum fault current. To satisfy the above conditions, the bounds of the \(i\) th relay's PS can be stated as follows [27]:
In this paper, the \(lb\) and \(ub\) values of PS are chosen to be 1.25 and 1.5, respectively. The TMS, PS, and the fault current shown by the relay determine the relay's OT. The OT is calculated using analytic formulas or standard inverse curves based on the characteristics of the relay. Each element of the objective function is constrained to be between 0.1 and 1.1. The backup relay should only be used after the primary relay has failed to prevent maloperation. It is required for the backup and primary relays’ selectivity to be maintained. The Coordination Time Interval (CTI) is the summation of the OT of the circuit breaker connected with the primary relay and the overshoot time. The gap between the OT of the backup relay and the primary relay should be greater than the CTI in coordinating two overcurrent relays. The CTI can be characterized as follows [27]:
where \({T}_{j,k}\) denotes the OT of the jh B-relay for a fault at kth location within the protected zone by the ith P-relay. Thus, the constraint for CTI can be represented as follows [27]:
where \({CTI}_{min}\) denotes a minimum CTI, and it is typically between 0.2 and 0.3 s. For all P/B pairs, the constraint for CTI should be met. Close-in, far-bus, and middle-point fault currents are commonly utilized, and they provide coordination for many fault scenarios.
2.3 Modified Objective Function
However, the least possible CTI between the backup and primary relays is essential for correct selection; considerably deferred backup relay operation is not preferred from the standpoint of successful relay coordination. Therefore, the objective function is adjusted to improve the CTI between primary and backup relays, as follows [29]:
where \(\Delta {T}_{mp}\) denotes the difference in OT with CTI between pth pair of relays, \(m\) denotes the number of relay units, \({m}_{p}\) denotes the number of P/B relay pairs, \({\alpha }_{1}\) and \({\alpha }_{2}\) denote weight factors, and \(\beta \) denotes factor to consider the miscoordination. If the value of \(\beta \) increases, the level of miscoordination decreases; however, it increases the OT of the relay units. Therefore, it is necessary to select the optimal values of \(\beta \). The synchronization between DORs is stated as a highly constrained and nonlinear optimization problem in which the TMS and PS of each relay are considered as design parameters. The major aim is to reduce the OTs of all P-relays, which are supposed to work to clear the faults in their respective regions after the faults are cleared.
3 Whale Optimization Algorithm (WOA)
WOA is a recently proposed metaheuristic algorithm based on swarms that have been presented for continual problems. It has been demonstrated to outperform contemporary meta-heuristic approaches in terms of overall performance [25, 30]. For example, it is simple and robust compared to other metaheuristic approaches, making it analogous to diverse nature-inspired algorithms in terms of implementation and robustness. The algorithm requires a smaller number of control parameters; in practice, only one parameter has to be fine-tuned. As depicted in Fig. 2, the humpback whale population in WOA searches for food in a multi-dimensional search space. In this model, the positions of whale populations are depicted as various decision vectors, and the range between whale populations and food relates to the level of fitness values. The three operational procedures described below are used to determine the time-dependent position of a whale population: (i) prey encircling, (ii) bubble-net attacking, and (3) prey search. The WOA is depicted in Fig. 3 in its most fundamental form.

Bubble-net attacking of the prey

Position update of the whale using spiral strategy
3.1 Prey Encircling
Whales can distinguish and encircle their prey while they are in their natural habitat. Because the location of the design optimization in the search area is not known a priori, the WOA assumes that the current best candidate solution is either the target prey or very close to the best solution in the search space. The top search agent would be identified, and the remaining search agents would adjust their positions to be as close as possible to that of the top search agent. According to [25], the following equations can be used to express the behaviour described above:
where \(\overrightarrow{{X}^{*}}\left(t\right)\) denote the best position of the agent, \(\overrightarrow{X}\left(t\right)\) denote the current position of the agent, \(t\) denote the current iteration, \(\overrightarrow{a}\) is constant, and it varies linearly from 2 to 0, and \(\overrightarrow{r}\) denotes a uniform random number between [0, 1].
3.2 Bubble-Net Attacking
For the whale's bubble-net behaviour to be described mathematically, a spiral mathematical model is used between the positions of the whale and the prey to simulate the helical structure movement of humpback whales [25].
where \(p\) denotes a constant which describes the logarithmic spiral shape, and \(l\) denotes a uniformly distributed arbitrary number between [–1,1].
3.3 Prey Search
For global optimization algorithms to function, if \(A>1\) or \(A\le -1\), the population is updated in accordance with the directions provided by a randomly chosen population in the role of the best population [25].
where \({X}_{\text{rand}}\) denotes random population position in the current iteration. Readers should refer to [25] for additional information.
4 Results and Discussions
It is verified in this paper that the WOA can be used to find the optimal coordination of directional overcurrent relays in the distribution network is considered. In this paper, there are three test cases, such as 3-bus (Case-1), 9-bus (Case-2), and 30-bus (Case-3) models, are considered. The results were presented for all three test cases. The control parameters of the WOA were taken based on the original paper, literature study, and trial and error method. The population size is 10 times the problem dimension, and the maximum number of iterations is selected as per the problem's complexity. The problem dimensions for the 3-bus test model is 6, for the 9-bus test model is 24, and for the 30-bus test model is 38. Therefore, the best population size for the 3-bus model is 60, for the 9-bus model is 240, and for the 30-bus model is 380. The value of the constant \(a\) is linearly decreased from 2 to 0, the value of \(l\) varies between [–1,1], and the value of \(p\) is a random number between [0,1]. The experimental results are discussed in three sub-sections. The sub-Sect. 1 defines the results attained by the WOA for Case-1 with different population sizes. The sub-Sect. 2 describes the results attained by the WOA for Case-2 with different population sizes. The sub-Sect. 3 defines the results attained by the WOA for Case-3 with different population sizes. A computer with an Intel Core i5 CPU operating at 4.45 GHz and 16 GB of memory is used to execute the experiment through MATLAB software. The lower and upper bounds for all case studies are selected as per the data collected from the different literature.
4.1 Case-1: 3-Bus Test Model
As demonstrated in Fig. 4, a three-bus (B1-B3) test system with one generator (G1) and six DORs (R1-R6) is investigated. The ratings of each component, as well as line data for each component, are taken from [12, 26]. As indicated in Table 1, the fault current at each bus is computed using the provided standard data, with the event of a fault in the centre of the line being taken into consideration. Table 1 also contains the primary rating of the CT. In clearing all near-end and far-end faults, it is necessary to synchronize the settings of each of the six relays that respond. As a result, there are a total of 12 control vectors in the DORs problem, which are designated as TMS1-TMS6 and PS1-PS6, respectively. The TMS values at the lower and upper levels are 0.05 and 1.1, respectively. PS is in the range of 1.25–1.50, depending on the model. The \({CTI}_{min}\) is set to its default value of 0.3 s.

Case-1: Schematic of the 3-bus test model
As shown in Table 3, the optimal TMS and PS parameters derived by the WOA are shown. For near- and far-end faults, the OT of all primary relays is also listed in Table 3. The OTs are within an adequate level of 0.1–1.1 s, which is satisfactory. The overall OT of the P-relays is 4.8613 s. As shown in Table 4, the DORs do not have any miscoordination pairings when they are in operation. To examine the convergence behaviour of WOA, the convergence curve is depicted in Fig. 5.

Convergence curves for different population sizes (3-bus model)
When analyzing the results obtained for two population sizes of the suggested WOA, it is evident that the WOA with a population size of 60 with 1000 iterations produces the optimal settings. In addition, the Run-Time (RT) of the WOA is also recorded in Table 4. As seen in Table 4, the RT value of WOA with a 40-population size is very much lesser than the WOA with a 60-population size. It is obvious that the algorithm with less population size takes lesser computation time. However, the results produced by the 60 population size are superior though the RT is high.
4.2 Case-2: 9-Bus Test Model
The schematic of the 9-bus system is shown in Fig. 6. With the normally inverse features, and there seem to be 24 digital DORs in this case study. TMS is recorded in the range of 0.01–1.0, and PS is recorded in the range of 0.5–2.5. In this case, the \({CTI}_{min}\) is fixed to a duration of 0.2 s. The value of the CT ratio is 500/1.

Schematic of the 9-bus test model
Short-circuit faults are formed in the centre of each line. The fault locations are labelled with the letters A-L in Fig. 6. Table 5 lists the fault currents observed in each P/B relay. In this optimization problem, there are a total of 48 decision vectors, i.e., TMS1-TMS24 and PS1-PS24 are considered. Due to problem complexity, the maximum iteration is selected as 2000.
The suggested WOA is used to solve the DORs coordination problem, as discussed earlier. Table 6 shows the optimal TMS and PS values, as well as the optimal objective function value. The OT values are within an acceptable range of 0.1–1.1 s in all primary relays. Comparisons are made between the optimum values of decision variables (TMS and PS) and OT using the results produced by WOA with two different population sizes, such as 150 and 250. Table 7 displays the respective CTI values. When comparing the WOA with two different population sizes, the results produced by WOA with 250 population size demonstrate that the total OT of primary DORs is lowered. As can be seen in Table 7, the optimal outcomes provide no miscoordination. Furthermore, while utilizing the WOA with a 250-population size, the CTI improves since the total CTI values are lowered when compared to WOA with a 150-population size, hence improving the CTI. To examine the convergence behaviour of WOA, the convergence curve is plotted and depicted in Fig. 7. From Fig. 7, it is observed that the convergence rate of the WOA with large population size is higher than lower population size.

Convergence curves for different population sizes (9-bus model)
4.3 Case-3: 30-Bus Test Model
The IEEE 30-bus system is taken into consideration to assess the efficacy of the WOA in tackling a larger power system problem. As illustrated in Fig. 8, the system can be thought of as a meshed sub-transmission/distribution system having distributed-generated units interconnected. For the 30-bus test model, a total of 38 DORs with normal inverse characteristics are examined, with one at every end of the lines. Table 8 shows the short-circuit current values for close-in faults. TMS is measured in the range of 0.1–1.1, and PS is measured in the range of 1.5–6. The CT ratio for each relay was supposed to be 1000/5. The \({CTI}_{min}\) value has been set to 0.3 s. Due to complexity, the maximum iteration is selected as 5000.

Schematic of the 30-bus test model
Table 9 shows the results achieved by WOA with two different population sizes, such as 300 and 400. Table 10 illustrates the CTI obtained from the optimum TMS and PS values, proving there is no miscoordination. This shows that results produced using WOA with a 400-population size are superior to those acquired using WOA with a 300-population size, as can be seen in the table. This demonstrates that the suggested WOA may be utilized to effectively handle the DORs’ coordination problem for large-scale power systems. The RT values are recorded, and it is obvious that WOA with a 400-population size takes more computation time than WOA with a 300-population size.
To observe the convergence behaviour of WOA while handling large-scale problems, the convergence curve is shown in Fig. 9. From Fig. 9, it is noticed that the convergence rate of the WOA with large population size is higher than the lower population size. The suggested WOA with a larger population size outperforms the WOA with a lower population size in terms of producing more stable and better solutions for all three test systems.

Convergence curves for different population sizes (30-bus model)
4.4 Discussions
Finding the best settings for these devices to save operation time and improve the durability of power systems is the objective of DOCRs’ optimal coordination. This is a challenging, nonlinear optimization problem with many constraints. WOA may be a superior option for this problem compared to other algorithms for the following reasons. (i) WOA, which uses many solutions (whales) in each iteration and changes them in accordance with the best solutions discovered, is a population-based algorithm. Compared to conventional gradient-based optimization approaches, this enables it to explore the solution space more completely and decreases the likelihood of getting stuck in local minima, (ii) Unlike what is frequently the case in relay coordination problems, WOA does not demand that the problem be differentiable or even continuous. This provides it with a considerable edge over techniques like the Newton–Raphson approach, which relies on the gradient of the problem, (iii) Compared to more sophisticated algorithms, WOA is simpler to use and is not as subject to overfitting because it has few parameters that need to be tuned, (iv) WOA has demonstrated strong scalability characteristics, indicating that it can successfully address issues of varied sizes. This is important since relay coordination problems can have a lot of different factors and limitations.
Comparing WOA with different sizes of populations and numbers of iterations can show how well it works and help tune its settings for the DOCR coordination problem. Note that an increased population size with more iterations usually leads to better solutions but at the cost of using more computing resources. Because of this, it is important to find an equilibrium that fits the needs and limits of your application.
5 Conclusions
Coordinating DORs in a distributed system is a challenging nonlinear optimization problem addressed in this research. The objective is to reduce the total OTs of all primary relays required to clear faults at their assigned locations. The TMS and the PS of each relay, which serves as the variables in this optimization problem, are two crucial choice criteria. The bus model's complexity causes the dimensionality to rise. Examples include the 3-bus model, which provides a six-dimensional problem, and the 9-bus and 30-bus models, which contain 24 and 38 dimensions. Due to multimodal landscapes’ enormous complexity and complicated nature, it is extremely difficult to reduce associated cost functions. We use the WOA to discover the best DOR coordination to address this. The WOA successfully avoids frequent errors, including premature convergence to inferior solutions and exhibits improved performance in multimodal situations. The WOA was additionally tested across various population sizes in a sensitivity analysis. The results showed that larger population sizes produced the best outcomes while raising the RT value. This highlights the WOA's capacity to deal with the difficult job of DOR coordination among remote networks and offers a viable path for further study and application. When handling these complicated cases, the persuasive results demonstrate that WOA outperforms. So WOA is an intriguing alternative to the standard optimizers that are widely employed in a wide range of real-world complex power system problems.
References
Elsadd MA, Kawady TA, Taalab AMI, Elkalashy NI (2021) Adaptive optimum coordination of overcurrent relays for deregulated distribution system considering parallel feeders. Electr Eng 103:1849–1867. https://doi.org/10.1007/S00202-020-01187-0/TABLES/7
Abdelaziz AY, Talaat HEA, Nosseir AI, Hajjar AA (2002) An adaptive protection scheme for optimal coordination of overcurrent relays. Electric Power Syst Res 61:1–9. https://doi.org/10.1016/S0378-7796(01)00176-6
Chelliah TR, Thangaraj R, Allamsetty S, Pant M (2014) Coordination of directional overcurrent relays using opposition based chaotic differential evolution algorithm. Int J Electr Power Energy Syst 55:341–350. https://doi.org/10.1016/J.IJEPES.2013.09.032
Castillo Salazar CA, Conde Enríquez A, Schaeffer SE (2015) Directional overcurrent relay coordination considering non-standardized time curves. Electric Power Syst Res 122:42–49. https://doi.org/10.1016/J.EPSR.2014.12.018
Ibrahim AM, El-Khattam W, ElMesallamy M, Talaat HA (2016) Adaptive protection coordination scheme for distribution network with distributed generation using ABC. J Elect Syst Inform Technol 3:320–332. https://doi.org/10.1016/J.JESIT.2015.11.012
Khond SV, Dhomane GA (2019) Optimum coordination of directional overcurrent relays for combined overhead/cable distribution system with linear programming technique. Protect Control Modern Power Syst 4:1–7. https://doi.org/10.1186/S41601-019-0124-6/TABLES/3
Sarkar D, Kudkelwar S, Saha D (2019) Optimal coordination of overcurrent relay using crow search algorithm 7:282–297. https://doi.org/10.1080/23080477.2019.1694802
Acharya D, Das DK (2021) Optimal coordination of over current relay using opposition learning-based gravitational search algorithm. J Supercomp 77:10721–10741. https://doi.org/10.1007/S11227-021-03705-8/TABLES/13
Saldarriaga-Zuluaga SD, López-Lezama JM, Muñoz-Galeano N (2020) Optimal coordination of overcurrent relays in microgrids considering a non-standard characteristic. Energies 13:922. 13, 922. https://doi.org/10.3390/EN13040922
Ramaswami R, Venkata SS, Damborg MJ, Postforoosh JM (1984) Computer aided transmission protection system design: Part II: Implementation and Results. IEEE Transactions on Power Apparatus and Systems. PAS-103, 60–65. https://doi.org/10.1109/TPAS.1984.318577
Muhammad Y, Raja MAZ, Shah MAA, Awan SE, Ullah F, Chaudhary NI, Cheema KM, Milyani AH, Shu CM (2021) Optimal coordination of directional overcurrent relays using hybrid fractional computing with gravitational search strategy. Energy Rep 7:7504–7519. https://doi.org/10.1016/J.EGYR.2021.10.106
Urdaneta AJ, Nadira R, Pérez Jiménez LG (1988) Optimal coordination of directional overcurrent relays in interconnected power systems. IEEE Trans Power Del 3:903–911. https://doi.org/10.1109/61.193867
Gao F, Han L (2012) Implementing the nelder-mead simplex algorithm with adaptive parameters. Comput Optim Appl 51:259–277. https://doi.org/10.1007/s10589-010-9329-3
Singaravelan AMK, Ram JPBG, Kim YJ (2021) Application of two-phase simplex method (TPSM) for an efficient home energy management system to reduce peak demand and consumer consumption cost. IEEE Access 9:63591–63601. https://doi.org/10.1109/ACCESS.2021.3072683
Momoh JA, El-Hawary ME, Adapa R (1999) A review of selected optimal power flow literature to 1993 part i: nonlinear and quadratic programming approaches. IEEE Trans Power Syst 14:96–103. https://doi.org/10.1109/59.744492
Borzabadi AH, Alemy H (2016) Dual simplex method for solving fully fuzzy linear programming problems. 4th Iranian Joint Congress on Fuzzy and Intelligent Systems, CFIS 2015 (2016). https://doi.org/10.1109/CFIS.2015.7391653
Luenberger DG, Ye Y (2015) Linear and nonlinear programming. Springer Publishing Company, Incorporated
Birla D, Maheshwari RP, Gupta HO (2006) A new nonlinear directional overcurrent relay coordination technique, and banes and boons of near-end faults based approach. IEEE Trans Power Del 21:1176–1182. https://doi.org/10.1109/TPWRD.2005.861325
Ravikumar Pandi V, Zeineldin HH, Xiao W (2013) Determining optimal location and size of distributed generation resources considering harmonic and protection coordination limits. IEEE Trans Power Syst 28:1245–1254. https://doi.org/10.1109/TPWRS.2012.2209687
Premkumar M, Srikanth Babu V, Somwya R (2019) Scheduling task to heterogeneous processors by modified ACO algorithm. Adv Intell Syst Comput 758:565–576. https://doi.org/10.1007/978-981-13-0514-6_55
Premkumar M, Jangir P, Sowmya R, Elavarasan RM (2021) Many-objective gradient-based optimizer to solve optimal power flow problems: analysis and validations. Eng Appl Artif Intell 106:104479. https://doi.org/10.1016/J.ENGAPPAI.2021.104479
Premkumar M, Jangir P, Santhosh Kumar B, Sowmya R, Haes Alhelou H, Abualigah L, Riza Yildiz A, Mirjalili S, Premkumar M (2021) A new arithmetic optimization algorithm for solving real-world multiobjective CEC-2021 constrained optimization problems: diversity analysis and validations. IEEE Access. 9:84263–84295. https://doi.org/10.1109/ACCESS.2021.3085529
Devi RM, Premkumar M, Jangir P, Elkotb MA, Elavarasan RM, Nisar KS (2022) IRKO: an improved Runge-Kutta optimization algorithm for global optimization problems. Comp Mater Continua 70:4803–4827. https://doi.org/10.32604/CMC.2022.020847
Hussain K, Mohd Salleh MN, Cheng S, Shi Y (2018) Metaheuristic research: a comprehensive survey. Artif Intell Rev 52:4. 52, 2191–2233. https://doi.org/10.1007/S10462-017-9605-Z
Mirjalili S, Lewis A (2016) The whale optimization algorithm. Adv Eng Softw 95:51–67. https://doi.org/10.1016/j.advengsoft.2016.01.008
Jordan R (2018) Optimal coordination of directional overcurrent relays. In: Jordan R (ed) Metaheuristic optimization in power engineering, pp 449–473. Institution of Engineering and Technology. https://doi.org/10.1049/PBPO131E_CH13
Sarwagya K, Nayak PK, Ranjan S (2020) Optimal coordination of directional overcurrent relays in complex distribution networks using sine cosine algorithm. Electric Power Syst Res 187:106435. https://doi.org/10.1016/J.EPSR.2020.106435
Amraee T (2012) Coordination of directional overcurrent relays using seeker algorithm. IEEE Trans Power Del 27:1415–1422. https://doi.org/10.1109/TPWRD.2012.2190107
Moravej Z, Adelnia F, Abbasi F (2015) Optimal coordination of directional overcurrent relays using NSGA-II. Electric Power Syst Res 119:228–236. https://doi.org/10.1016/J.EPSR.2014.09.010
Premkumar M, Sumithira R (2018) Humpback whale assisted hybrid maximum power point tracking algorithm for partially shaded solar photovoltaic systems. J Power Elect 18:1805–1818. https://doi.org/10.6113/JPE.2018.18.6.1805
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Premkumar, M., Sowmya, R., Kumar, J.S.V.S., Jangir, P., Abualigah, L., Ramakrishnan, C. (2024). Optimal Co-Ordination of Directional Overcurrent Relays in Distribution Network Using Whale Optimization Algorithm. In: Gupta, O.H., Padhy, N.P., Kamalasadan, S. (eds) Soft Computing Applications in Modern Power and Energy Systems. EPREC 2023. Lecture Notes in Electrical Engineering, vol 1107. Springer, Singapore. https://doi.org/10.1007/978-981-99-8007-9_17
Download citation
DOI: https://doi.org/10.1007/978-981-99-8007-9_17
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-8006-2
Online ISBN: 978-981-99-8007-9
eBook Packages: Computer ScienceComputer Science (R0)