
Abstract
This paper examines the influence of discrete mode controllers with optimum sampling frequency to enhance the stability of the grid-integrated AC microgrid. The damping of low-frequency electromechanical oscillation performance of distributed generators of AC microgrid is analyzed. The AC microgrid is comprised of two renewable energy resources a photovoltaic (PV) farm, a variable wind speed type DFIG wind farm, and another two distributed generators hydro and diesel are based on synchronous generators. The diesel generator is used as a backup source to provide the load demand when the grid is subjected to disturbance and the generation of renewable power is not as per demand. This research investigates the effect of the execution of different discrete type’s power system stabilizers with an optimum sampling frequency to enhance the stability of the AC microgrid. The discrete type time domain mode PSSs such as conventional PSS (Δω-PSS and ΔPa-PSS), MBPSS-4B, and LQG-based PSS controllers are executed on DGs of the AC microgrid for the damping of low-frequency electromechanical oscillation. The MATLAB/Simulink software gives a comparative analysis of the discrete mode controller's response to distributed generators of AC microgrid. The simulation result verified the system performance with an effective operational sampling frequency of discrete time domain mode controllers such as conventional PSSs, MBPSS-4B, and LQG controllers under fault conditions.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- AC microgrid
- Discrete mode controller
- Power oscillation damping
- Small signal stability
- Distributed generators
- Solar photovoltaic
- Wind energy
1 Introduction
In the present scenario, renewable energy sources-based microgrids are becoming increasingly in demand to generate clean energy. The generation of electricity from renewable energy sources (RESs) is only the key to decline the global warming. Interconnecting renewable energy generation sources with electrical power generation storage devices can be establishing a stable microgrid. The microgrid is an emerging field that offers to deliver reliable responses to the increase in stress on the main grid and transmission lines. The most effective general form for generation is, a microgrid integrated with both renewable energy sources (RESs) like wind, solar PV cells, and fuel cells also together with traditional energy sources like diesel generators, micro turbines, and micro or small hydro [1]. The integration of microgrid with renewable and traditional energy sources is controlled by the robust design controller, and it provides operational stability to the systems. In the interface of power electronics controller with RESs, there are many obstacles that are shown, such as continuing the power supply without any interruptions, integration of RESs with conventional grid, issues of power quality, stability, security, reliability, protection, and energy storage system, concerning the frequency and voltage deviation [2]. Therefore, researchers applied the technological advancement that is moving in the direction of implementation of renewable energy sources achieving maximum electricity generation to match the energy need. The major challenges with renewable energy sources are weather dependent so the generation of energy is variable in nature and utilization of these resources imposes a reduction in the inertia of the grid. Because of this, the problem of stability arises in power systems. Solar photovoltaic (SPV) energy and wind power are two main sources of renewable energy utilized in the generation of electricity, and they are free of pollution or carbon-free [3].
The voltage fluctuations, frequency oscillations, variance in generation and demand, etc., are a few main issues in the main power grid. The main focus of the researcher is to protect and maintain the stability of the main grid from the above discussed issues to construct a confined power generated grid that is known as a microgrid [4]. A microgrid provides electricity to rural, urban, and hilly areas if the failure or unavailability of the external grid. The advantages of a microgrid (MG) are provided energy at the time of peak load, environmentally friendly, and give an economical energy solution. The major problems for microgrids during the integration of intermittent renewable-based DGs are low inertia, change in voltage and frequency, stability, and protection [5].
The modes of operation in the microgrid are the following: the grid-connected, autonomous, or transited, and the reconnection operating modes. A microgrid in grid-connected mode can manage and interchange the generation of electricity with the conventional grid and maintain the power supply from renewable energy-based distributed generators of the microgrid, although the energy flows through a microgrid is bidirectional [6]. In the autonomous or stand-alone mode, the microgrid can sustain the balance in reactive power in the self-base without the existence of an infinite bus. So this mode has major challenges considering a proper voltage and frequency magnitude, and another is proper power balance. The microgrid is classified into three major types as per power bus and load that is AC power, DC power, and hybrid (AC/DC) power microgrids [7].
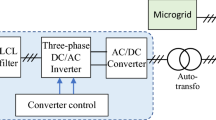
Traditionally, a hierarchical architecture with primary, secondary, and tertiary supervisory control levels has been accomplished for the control of distributed generators (DGs), BESSs, the transition of operating modes, and the stability of the main grid and microgrid [8]. Figure 1 shows the diagrammatic block diagram of the AC microgrid with different distributed generators.

Typical diagram of AC microgrid
In the microgrid, the distributed generation resources are associated with the utility grid with an interface of a power electronics converter to operate as per their requirements and also to maintain the stability and quality of modern power systems [9].
The dynamic stability of the microgrid is the main issue because of the disturbances due to the fault, changes in load, and changes in voltage and frequency. For this reason, the research is focused on the stability of microgrids in terms of analysis of small signal stability. To measure, the dynamic stability of the microgrid, a small signal stability analysis gives an adjustment to the control variable of the microgrid [10].
The small signal stability in terms of low-frequency electromechanical oscillation of the distributed generators of the systems should be enhanced the system stability. The execution of power system stabilizers (PSSs) in the power generating distributed generator units dampens the electromechanical oscillations, which improves the system stability [11]. The different types of robust design oscillation damping controllers are executed in distributed generators of the systems to achieve better performance of the systems against low-frequency oscillations, and they are represented as traditional or local PSSs based on input speed and power, multi-band PSS (MBPSS), PID-PSS, fuzzy logic-based PSS (FLPSS), H infinity (H \(\infty\)), etc. [12,13,14].
However, type-1 fuzzy logic-based PSS controller techniques provide improve performance compared with conventional PID-based PSSs in terms of damping performance low-frequency oscillations of distributed generators of the systems; these standard type-1 fuzzy logic PSSs have shortcomings when it comes to handling significant levels of uncertainty and unpredictable disturbances in modern power systems. Have robustness in type-2 fuzzy logic-based PSS (FLPSS-II) to eliminate the uncertainties and unpredictable disturbance [15].
One of the best choices to get over these restrictions is a robust LQG controller. Its function's specificity makes it easier to manage uncertainty. According to a LQG-PSS with a distinctive estimation algorithm is successful at damping oscillations in the modern power system [16]. Continuous time domain LQG is a robust controller for damping the low-frequency oscillation (LFO) of distributed generators, and it also provides small signal stability to the system. This technique allows you to deal with regulation performance and provide the control signal to disturbances and measurement or random noise [17, 18].
The continuous time domain mode power system stabilizers are tuned by different tuning methods such as PVr, GEP, and residue methods for selecting the optimal control values of gain and proper pole placements. Further, this tuned continuous time domain mode H(S) PSS transfers in the discrete time domain mode H(Z) PSS. The discrete transfer function of PSSs is used to easily dampen the low-frequency oscillations to achieve the small signal stability of the power system [19, 20].
The research gap is identified from the conclusion drawn from the literature survey on various aspects of the AC microgrid. Some domains need further attention such as comparative analysis of conventional lead-lag controllers in AC microgrid. The corresponding discrete mode controllers are also not armed systematically in any AC microgrid. There is also a need of investigating the performance of the AC microgrid at the optimal sampling frequency of discrete mode controllers.
The organization of the remaining article represents the following: Section 2 represents the proposed approach of the paper. Section 3 represents the modeling of the AC microgrid test system with the mathematical modeling of distributed generators, and Sect. 4 gives a brief discussion of discrete mode damping controllers and the mathematical modeling of robust discrete LQG controller. Section 5 represents the result section with the comparative analysis of the controller's validation. The paper ends with a conclusion in Sect. 6, followed by the references.
2 Proposed Approach
This paper proposed the design of damping robust discrete controllers to enhance the dynamic stability of the AC microgrid. The execution of discrete controllers in distributed generators of grid-integrated AC microgrid gives better performance against the disturbance of low-frequency electromechanical oscillations in a shorter settling time. Overall the proposed approach of this research work is to raise the small signal stability of the AC microgrid using different types of discrete mode controllers with optimal sampling frequency.
The main objectives of the research paper are
-
The robust design of discrete mode PSSs controllers is the main motive for a grid-connected AC microgrid to increase the system damping characteristics of low-frequency oscillation (LFO) mode for the stabilization of the microgrid.
-
The performance of the different discrete mode PSSs such as CPSS (ΔPa-PSS and Δω-PSS), MBPSS (MBPSS-4B), and LQG has been compared to analyze the effectiveness of these discrete PSSs for improving the stability of AC microgrid under different varying operating conditions such as a three-phase line to ground fault.
-
The discrete mode controllers give better damping performance against the disturbance at the optimal control sampling frequency.
-
The compared controller's performance gives discrete time domain mode LQG is the most robust power oscillations damping (POD) controller to improve the dynamic small signal stability and damp the low-frequency electromechanical oscillations of the system.
-
Validation of the proposed controllers in MATLAB/Simulink platform.
3 Test System
In this modeling of the test system total, 24.5 MW capacity of the distributed generators of the microgrid is connected to the AC grid where 20 kV, 50 Hz with a base MVA is 1000 MVA construct a grid-integrated AC microgrid. The proposed AC microgrid comprises four different power generating units with their installed capacity, a photovoltaic (PV) farm is 8 MW, a DFIG wind turbine is 4.5 MW, hydro is 6 MW, and diesel is 6 MW as a backup. The test system represents in single line grid-integrated AC microgrid illustration under fault conditions shown in Fig. 2 to examine the impact on DGs of electromechanical low-frequency oscillation in power systems. The main research concentrates on oscillations in a low frequency on a scale of 0.1–1 Hz because the focus of this investigation is how to increase the damping performance of modern power systems [21].

AC microgrid single line diagram test system
The power system stabilizers (PSSs) allow an auxiliary stabilization signal to distributed generators of AC microgrid, which measures the low-frequency oscillations (LFO) of the system and also increases the system stability. To dampen out the power oscillation of DGs of AC microgrid PSSs are used, this is attained with a voltage regulator to generate a torque in phase with speed [22]. The distributed generators connected with different PSSs using a multi-input and single-output switch are represented in Fig. 3.

Distributed generator arrangement with a discrete mode controller
The equivalent solar photovoltaic (SPV) circuit diagram with a load RL is represented in Fig. 4. The output current of the SPV is represented by Eq. (1). Its circuit diagram has a current source, diode, and resistor and is present in [23].
where \(I_{{{\text{SPV}}}}\) is the total PV current, \(I_{{{\text{ph}}}}\) is photo current, and \(I_{{{\text{sh}}}}\) is the shunt current across shunt resistance.

Photovoltaic cell equivalent circuit
The PN junction diode is used to get the unit exponential expression characteristics that represent a solar PV (SPV) system, and it is then expanded to obtain the solar PV total output current as shown below.
Here, \(I_{{{\text{SPV}}}}\) is total solar PV current (Amp.), \(V_{{\text{A}}}\) is solar PV voltage (Volt.), \(\eta\) is identity factor, \(I_{0}\) is reverse saturation current (Amp.), \(R_{{\text{S}}}\) is array series resistance (\(\Omega\)), \(I_{{{\text{SCA}}}} \left( G \right) = N_{{\text{P}}} I_{{{\text{SC}}}} \left( G \right)\), \(I_{{{\text{SC}}}}\) is SPV short circuit current (Amp.), \(G\) is PV insolation (\({\text{Wh}}/{\text{m}}^{2}\)), \(N_{{\text{P}}}\) is the No. of modules in parallel, \(N_{{\text{S}}}\) is the No. of modules in series, k is represented as the Boltzmann constant, and q is the electron charge (C).
The DFIG-based wind turbine (DFIG-WT) to generate electrical power is depicted in Fig. 5, which is used for variable speed wind turbines. Its output power can be represented as follows:
and generated torque due to the wind passing through the turbine blades is given as
where \(C_{{\text{p}}} \left( {\beta ,\lambda } \right)\) known as the coefficient of power is related to the pitch angle (\(\beta\)) and tip velocity constant (\(\lambda\)) of the turbine blades, \(\rho\) denotes air density, \(v_{{{\text{wind}}}}\) denotes the velocity of wind, and R is the radius of the turbine blade [24].

DFIG configuration using wind energy conversion system
Equation 5 shows the relationship between the DFIG parameters which is the power coefficient \(C_{{\text{P}}} \left( {\beta ,\lambda } \right)\) concerning relates with pitch angle (β) of turbine blades, wind velocity \(\left( {\omega_{\text{wind}} } \right)\,\text{m}/{{{\text{s}}}}\), and tip velocity constant \(\lambda\), respectively.
The tip speed ratio (\(\lambda_{i}\)) is given as in Eq. (6)
4 Modeling of Damping Controllers
The power oscillation of the AC microgrid is dampened by the different types of continuous and discrete types of damping controllers and by this improved the performance of the overall system. The small signal stability problem in the distributed generators of the AC microgrid system such as rotor speed deviation, rotor angle deviation, frequency deviation, and voltage deviation, etc. are the disturbances due to fault. The execution of various types of discrete PSS in DGs of AC microgrid provides the oscillation damping and improves the system stability. The main role of PSSs dampens the electromechanical low-frequency oscillations (LFO) of the microgrid [25]. The AC microgrid distributed generators are used different types of power oscillation damping controllers which are described as
-
(i)
Speed-based stabilizer
-
(ii)
Frequency-based stabilizer
-
(iii)
Power-based stabilizer
-
(iv)
Discrete mode PSS
-
(v)
Multi-band stabilizer (MBPSS-4B)
-
(vi)
Discrete LQG controller.
4.1 Discrete Time Domain Controllers
This block diagram’s function is to transform the continuous time domain (t) signal to discrete time domain (z) response signal using contained blocks as shown in Fig. 6, corresponding to input signal block, sample and hold circuit, pulse generator, gain, discrete transfer function, and desired response blocks. In this, the continuous transfer function H(s) converts into discrete transfer function H(z) to develop a desired controller with the help of a sample and hold circuit at the desired sampling frequency. Sample and hold are used to implement a signal sample and hold in discrete mode at desired sampling frequency to achieve optimum control response of the system. With these blocks function design, a discrete time domain controllers and improved the performance of systems and achieved optimum control response against disturbance at a sampling frequency consider 25 Hz (T = 0.04 s) [26, 27].

Block diagram continuous to discrete mode controller conversion
While the estimation hold is zero-order hold (ZOH), at that time the discrete corresponding to H(s) is represented by Eq. (7).
where H(s) is known as the phase lead function shown in Eq. (8)
So zero-order hold corresponding is represented by Eq. (9).
4.2 Conventional Damping Controllers (Δω-PSS and ΔPa-PSS)
The power oscillation damping controller is used to enhance the damping of the system. The basic functioning block model of the PSS damping controller is represented in Fig. 7. The deviation in rotor speed (Δω) or accelerating power (Pa) is selected as input to enhance the damping by adding the feedback signal (VS) to excitation. The typical block diagram speed input-based PSS consists of different blocks considered as, a gain (KPss), a washout time filter (Tw) block, a phase angle compensation lead/lag with a time constant (T) block, and a limiter (Vmax − Vmin) [28,29,30].

Single input lead–lag power system stabilizer structure
The transfer function of the conventional power system stabilizer (CPSS) damping controller is given in Eq. (10) when the generator rotor speed (Δω) is selected as a feedback signal.
The above equation represents speed (Δω) or acceleration power (Pa) as the input signal as ‘y,’ Tw represents as washout time constant, T1, T2, T3, and T4 are represented as the time constant, and Kpss represents as the gain of PSS.
4.3 Multi-band PSS (MBPSS-4B) Damping Controller
The MB-PSS damping controller structure is encountered by the IEEE St. 421.5 PSS-4B sort mode to achieve a wide range of electromechanical oscillation damping improvements. The structure of MBPSS-4B provides three adjustable tuning bands as the low-frequency band (FL) with a range of 0.01–0.1 Hz, the intermediate frequency band (FI) with a range of 0.1–1 Hz, and the high-frequency band (FH) with a range of 1–4 Hz modes of the oscillation, which are shown in Fig. 8 [31, 32].

Multi-input-based MBPSS-4B IEEE standard damping controller
4.4 Mathematics Modeling of Discrete LQG Controller
The system implemented with the LQG controller is used to stabilize and regulate the system. The system is influenced by disturbances or uncertainties and also in addition to communication noise is considered a feedback measurement signal which is described by the state space equation of the system [33, 34]. The discrete time domain linear quadratic Gaussian controller equation in discrete time is described by Eqs. (11) and (12).
In the mathematical modeling of discrete LQG controller denotes \(A_{i} ,B_{i} ,C_{i}\) as the state matrix and ‘\(x_{i}\)’ is the state vector of ‘n’ dimensional ‘\(u_{i}\)’ is the vector of input of ‘m’ dimensional, and ‘\(y_{i}\)’ is the vector of the output of ‘q’ dimensional, and here, ‘\(i\)’ represents the discrete time index. The system needs to be, controllable, and observable, linear time-invariant. In input, ‘vi’ is the disturbance noise, whereas ‘wi’ is the measurement noise. Here, \(E\left( {w_{i} w_{i}^{{\text{T}}} } \right) = W_{i} \;{\text{and}}\;E\left( {v_{i} v_{i}^{{\text{T}}} } \right) = V_{i}\) are related to covariance matrices, respectively. The expectation operator of the system is denoted by E.
J is the cost function corresponding to obtain the optimal control ‘\(u_{i}\)’ on uncertainties in the system can be expressed by Eq. (13).
The discrete time mode LQG controller is represented by given equations as
where \(\hat{X}_{i}\) is analogous to the predictive estimate.
The gain of the Kalman estimator is
where \(P_{i}\) is calculated by the given Riccati difference equation that moved in forward time,
The feedback gain matrix is represented as
where \(S_{i}\) is calculated by the given Riccati difference equation that moved in backward time,
The main functioning block diagram of the discrete mode LQG controller is represented in Fig. 9. The collective performance of Kalman estimator and linear regulator form the model of linear quadratic Gaussian controller which is used to provide effective performance against disturbances or uncertainties in the system [35]. In this work, the sampling time is 0.04 s. consider because controllers provide optimal control response against disturbances of low-frequency electromechanical oscillations, and discrete mode LQG controller gives better performance on this sampling frequency 25 Hz (T = 0.04 s).

Conventional model of LQG controller
5 Simulation Results
The simulation results present that the stability enhanced the AC microgrid with the effect of discrete controllers at the optimal control sampling frequency. A 3-ϕ L-G fault, on the transmission line at a T = 1 s. with spam of the fault is 0.15 s. in the AC microgrid test model. The implementation of the distinct types of discrete damping controllers at an optimum control sampling frequency of 25 Hz (T = 0.04 s) is analyzed for the improvement of the constraint of low-frequency electromechanical oscillations in distributed generators of the grid-integrated AC microgrid. The responses of the diesel and hydro distributed generators with the effect of different types of discrete controllers with considered optimal sampling frequency are represented in Figs. 10, 11, 12, 13, 14 and 15 respectively with the variable such as rotor speed deviation (Δω), rotor angle deviation (Δδ), and output active power (Pe). Similarly, the responses of the DFIG-based wind farm and solar photovoltaic (SPV) farm distributed generators with the influence of discrete controllers are represented in Fig. 16 with the parameter of rotor speed deviation (Δω) of the DFIG-based wind farm distributed generator, and Fig. 17 PV bus voltage at PCC of photovoltaic (PV) farm distributed generator. The obtained response represents the enhanced stability in terms of damping the electromechanical low-frequency oscillation of AC microgrid distributed generators with the discrete controllers at the optimal sampling frequency. The robust design LQG controller is ideal and gives better results compared with conventional PSS (Δω-PSS and ΔPa-PSS) and MBPSS-4Bcontrollers in the discrete time domain mode with considered optimal sampling frequency.

Rotor speed deviation Δω (pu) of diesel generator

Rotor angle deviation Δδ (rad) of diesel generator

Output active power (Pe) of diesel generator

Rotor speed deviation Δω (pu) of hydro generator

Rotor angle deviation Δδ (rad) of hydro generator

Output active power (Pe) of hydro generator (pu)

Rotor speed deviation Δω (pu) of DFIG-based wind farm

PCC PV voltage (pu) of PV solar farm
The summarized results show that the different discrete mode controllers at optimum control sampling frequency, i.e., F = 25 Hz (T = 0.04 s), enhance the stability of the AC microgrid. The discrete LQG damping controller is more robust and improves the small signal stability of low-frequency electromechanical oscillations of the distributed generators of the AC microgrid.
6 Conclusion and Future Scope
This research work analyzed the enhancement of the stability of the AC microgrid with the design of the damping controller in a discrete time domain with optimum sampling frequency. In this, a microgrid integrated with four different distributed generators unit like a variable wind speed-based DFIG wind farm, photovoltaic (PV) farm, hydro, and one backup unit as a diesel generator. The execution of various types of damping discrete controllers such as conventional PSSs (Δω-PSS and ΔPa-PSS), multi-band PSS4B (MBPSS-4B), and robust LQG controller at an optimum sampling frequency (T = 0.04 s) executed on the distributed generators of the AC microgrid. Therefore examined and compared the performance of controllers with the disturbances and their effect to increase the dynamic small signal stability. The attained responses of the DGs of the AC microgrid appear that the discrete time domain LQG controller is the more robust damping controller for dampening the low-frequency oscillations in a shorter settling time compared with the discrete conventional PSSs and discrete multi-band PSS4B (MBPSS-4B). Overall, we examined the performance of controllers in discrete time domain mode where the sampling frequency is considered 25 Hz (T = 0.04 s), the performance shows that discrete time domain mode LQG is the most robust power oscillations damping controller to improve the dynamic small signal stability and damp the low-frequency electromechanical oscillations of the system in shorter settling time. This research work can be extended further for the implementation of all considered discrete types of controllers that can be used to investigate the performance of islanded mode AC microgrid.
References
Shahgholian G (2021) A brief review on microgrids: operation, applications, modeling, and control. Int Trans Electr Energy Syst 31(6):e12885
Hossain MA, Pota HR, Hossain MJ, Blaabjerg F (2019) Evolution of microgrids with converter-interfaced generations: challenges and opportunities. Int J Electr Power Energy Syst 109:160–186
Abdelgawad H, Sood VK (2019) A comprehensive review on microgrid architectures for distributed generation. In: 2019 IEEE electrical power and energy conference (EPEC), pp 1–8
Mariam L, Basu M, Conlon MF (2016) Microgrid: architecture, policy and future trends. Renew Sustain Energy Rev 64:477–489
Mishra S, Mallesham G, Sekhar PC (2013) Biogeography based optimal state feedback controller for frequency regulation of a smart microgrid. IEEE Trans Smart Grid 4(1):628–637
Yang J, Yuan W, Sun Y, Han H, Hou X, Guerrero JM (2018) A novel quasi-master-slave control frame for PV-storage independent microgrid. Int J Electr Power Energy Syst 97:262–274
Sen S, Kumar V (2018) Microgrid modelling: a comprehensive survey. Annu Rev Control 46:216–250
Narayanan V, Kewat S, Singh B (2021) Control and implementation of a multifunctional solar PV-BES-DEGS based microgrid. IEEE Trans Industr Electron 68(9):8241–8252
Li Y, Xu Z, Xiong L, Song G, Zhang J, Qi D, Yang H (2019) A cascading power sharing control for microgrid embedded with wind and solar generation. Renew Energy 132:846–860
Hemanand T, Subramaniam NP, Venkateshkumar M (2018) Comparative analysis of intelligent controller based microgrid integration of hybrid PV/wind power system. J Ambient Intell Humanized Comput 1–20
Puchalapalli S, Tiwari SK, Singh B, Goel PK (2018) A microgrid based on wind driven DFIG, DG and solar PV array for optimal fuel consumption. In: 2018 IEEE 8th power India international conference (PIICON), pp 1–6
Singh B, Pathak G, Panigrahi BK (2018) Seamless transfer of renewable-based microgrid between utility grid and diesel generator. IEEE Trans Power Electron 33(10):8427–8437
Chang GW et al (2014) Modelling and simulation for INER AC microgrid control. In: 2014 IEEE PES general meeting | conference & exposition, pp 1–5
Hou X et al (2018) Distributed hierarchical control of AC microgrid operating in grid-connected, islanded and their transition modes. IEEE Access 6:77388–77401
Mohammed A et al (2019) AC microgrid control and management strategies: evaluation and review. IEEE Power Electron Mag 6(2):18–31
Baharizadeh M, Karshenas HR, Guerrero JM (2018) An improved power control strategy for hybrid AC-DC microgrids. Int J Electr Power Energy Syst 95:364–373. https://doi.org/10.1016/j.ijepes.2017.08.036
Das DC, Roy AK, Sinha N (2012) GA based frequency controller for solar thermal–diesel–wind hybrid energy generation/energy storage system. Int J Electr Power Energy Syst 43(1):262–279
Kumar A, Bhadu M, Arora A (2022) Coordinated wide-area damping control in modern power systems embedded with utility-scale wind-solar plants. IETE J Res 1–24. https://doi.org/10.1080/03772063.2022.2082565
Kumar A, Bhadu M (2022) A comprehensive study of wide-area damping controller requirements through real-time evaluation with operational uncertainties in modern power systems. IETE J Res 1–22. https://doi.org/10.1080/03772063.2022.2043784
Alnuman H (2022) Small signal stability analysis of a microgrid in grid-connected mode. Sustainability 14(15):9372
Paital SR, Ray PK, Mohanty A (2018) Comprehensive review on enhancement of stability in multimachine power system with conventional and distributed generations. IET Renew Power Gener 12(16):1854–1863
Rafique Z et al (2022) Bibliographic review on power system oscillations damping: an era of conventional grids and renewable energy integration. Int J Electr Power Energy Syst 136:107556
Kumar A, Bhadu M (2022) Wide-area damping control system for large wind generation with multiple operational uncertainty. Electr Power Syst Res 213(108755):01–23. https://doi.org/10.1016/j.epsr.2022.108755
Mohammadzadeh A, Kayacan E (2020) A novel fractional-order type-2 fuzzy control method for online frequency regulation in ac microgrid. Eng Appl Artif Intell 90:103483
Mishra S, Patel S, Prusty RC, Panda S (2020) MVO optimized hybrid FOFPID-LQG controller for load frequency control of an AC micro-grid system. World J Eng 17(5):675–686. https://doi.org/10.1108/WJE-05-2019-0142
Bhadu M, Senroy N (2014) Real time simulation of a robust LQG based wide area damping controller in power system. In: IEEE PES innovative smart grid technologies, Europe. IEEE
Rahman M, Sarkar SK, Das SK, Miao Y (2017) A comparative study of LQR, LQG, and integral LQG controller for frequency control of interconnected smart grid. In: 2017 3rd international conference on electrical information and communication technology (EICT), pp 1–6. https://doi.org/10.1109/EICT.2017.8275216
Ranjan V, Arora A, Bhadu M (2022) Stability enhancement of grid connected AC microgrid in modern power systems. In: Proceedings of international conference on computational intelligence and emerging power system. Springer, Singapore
Kesraoui M, Lazizi A, Chaib A (2016) Grid connected solar PV system: modeling, simulation and experimental tests. Energy Procedia 95:181–188
Wang J (2021) Design power control strategies of grid-forming inverters for microgrid application: preprint. National Renewable Energy Laboratory, Golden, CO. NREL/CP-5D00-78874. https://www.nrel.gov/docs/fy22osti/78874.pdf
Kumar A, Bhadu M, Kumawat HC, Bishnoi SK, Swami K (2019) Analysis of sampling frequency of discrete mode stabilizer in modern power system. In: 2019 international conference on computing, power and communication technologies (GUCON), pp 14–20
Agrawal V, Rathor B, Bhadu M, Bishnoi SK (2018) Discrete time mode PSS controller techniques to improve stability of AC microgrid. In: 2018 8th IEEE India international conference on power electronics (IICPE). IEEE, pp 1–5
Kamwa I, Grondin R, Trudel G (2005) The limits of performance of modern power system stabilizers. IEEE Trans Power Syst 20(2):903–915
Kumar A, Sharma P, Bhadu M (2021) Performance analysis of multi-band PSS in modern load frequency control systems. Reliab Theor Appl 16(SI 1(60)):46–57. https://doi.org/10.24412/1932-2321-2021-160-46-57
Bhadu M, Senroy N, Narayan Kar I, Sudha GN (2016) Robust linear quadratic Gaussian-based discrete mode wide area power system damping controller. IET Gener Transm Distrib 10(6):1470–1478
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Arora, A., Bhadu, M., Kumar, A. (2024). Stability Enhancement of AC Microgrid Using Discrete Mode Controllers with Optimum Sampling Frequency. In: Malik, H., Mishra, S., Sood, Y.R., Iqbal, A., Ustun, T.S. (eds) Renewable Power for Sustainable Growth. ICRP 2023. Lecture Notes in Electrical Engineering, vol 1086. Springer, Singapore. https://doi.org/10.1007/978-981-99-6749-0_64
Download citation
DOI: https://doi.org/10.1007/978-981-99-6749-0_64
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-6748-3
Online ISBN: 978-981-99-6749-0
eBook Packages: EnergyEnergy (R0)