
Abstract
Arc restriking will prolong the arc extinguishing time and increase the erosion of the contacts, seriously reduces the electrical life and reliability of the relays. In particular, arc restriking is more likely to happen in DC circuit with inductive load. Therefore, based on MHD theory, this paper uses COMSOL Multiphysics to establish a two-dimensional mathematical model of arc plasma of HVDC relays. By applying different sizes of magnetic field, the arc voltage, current and images are obtained to analyze the arc restriking characteristics in a circuit with a load of 100 V/100 A. The results show that increasing the external magnetic field in a certain range is beneficial to accelerate the arc extinguishing. However, as the external magnetic field increases further, the arc restriking is more easily and earlier to happen.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
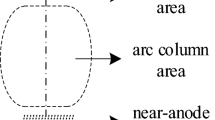
In the process of DC arc movement, there are only high-temperature gases and a small amount of metal vapor exist in the arc gap [1]. When the electric field strength of the arc gap reaches the critical restriking field strength, arc restriking happens. At the same time, the arc will temporarily stay between the arc gap or the arc root will move on the surface of the contact, which is called arc stagnation [2]. The arc restriking phenomenon of relays with a arc extinguishing chamber has been the focus of scholars [3, 4]. Literature [2] showed the influence of different current on arc stagnation and restriking, and obtained the critical restriking field strength through the combination of experiment and simulation. Multiple arc column restriking phenomenon are showed in literature [5] under the condition of 450 V/10 A DC, and relationship between the restriking frequency of silver contacts and the strength of the magnetic field and electric field. Literature [6] showed the restriking phenomenon at DC V. The probability of arc restriking phenomenon under different voltages is studied in literature [7], and a simplified simulation model of analyzing the mechanism of restriking is established. The above studies on arc restriking did not consider the effect of metal vapor and was all carried out under high voltage direct current.
In this paper, the arc restriking characteristics of 100 V/100 A DC are studied. The result shows that the arc restriking increases increases the arcing time and the erosion of the contacts, which will reduce the electrical life and reliability of the relays. Therefore, a mathematical model of DC arc is established based on MHD and the influence of external magnetic field on arc restriking characteristics is studied.
2 Experiment
2.1 Structure of the Arc Test System
In this paper, a DC arc test system is used to collect arc images and parameters of the HVDC relay. The test system includes main circuit, controlling circuit, high-speed camera, and data acquisition part, as shown in Fig. 1. The main loop current is 100 A and the switching voltage is 100 V. A high-speed camera is used to capture images of the arc during the breaking process, and the data acquisition part collects the arc current and voltage. A permanent magnet is added to the back of the two pairs of contacts to provide transverse magnetic field with different magnetic field strength.

Structure of the arc test system
2.2 Experiment
Figure 2 shows the images of DC inductive arc restriking during the breaking process when the magnetic flux density is 40 mT and the arc voltage and current is 100 V and 100 A respectively. As shown in the picture, at t = 1.18 ms, a prebreakdown channel is formed at point A, which is white spot, namely luminescent plasma. At t = 1.24 ms, the luminescent plasma is transformed into arc, and the arc reignites between the contact and the arc column.
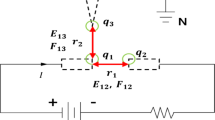
The free gas remains due to the temperature of arc area, and needs a certain amount of time to spread, decreasing the strength of the insulation of the arc gap. The arc root moves to the edge of the contact. Then the arc is elongated, the arc voltage increases rapidly, which leads to the arc restriking. The new arc column and the original arc column form a parallel channel, which makes the arc resistance drop rapidly. Figure 3 is the arc voltage waveform. It can be seen from the figure that the arc voltage drops at point 1 marked in the figure, corresponding to point A in Fig. 2. The drop of voltage is precisely because the arc restriking, two arcs are connected in parallel, and the resistance drops, and the voltage also drops.
Arc restrikig will be affected by voltage, current, magnetic field and arc extinguishing medium. In this paper, the experiment of breaking 100 V/100 A inductive load was carried out for 40 times for HVDC relay. The obtained arc restriking times in air medium are shown in Fig. 4. It can be seen from the figure that with the increase of the applied magnetic field, the frequency of arc restriking also increases. When the applied magnetic field is greater than 40 mT, the probability of arc restriking is more than 50%, and when it is 60 mT, the probability of arc restrking is 95%.

Arc restriking images during the breaking process

Arc restriking voltage during the breaking process

The number of arc restriking times under different magnetic field sizes
3 Numerical Model
3.1 Geometric Model
In this paper, a high voltage DC relay with bridge double break point structure is studied. The rated voltage of the relay is 150 V, the current is 100 A, the diameter of the moving contact and the fixed contact is 8 mm, and the material is silver tin oxide. Its structure is shown in Fig. 5. In the simulation of arc plasma, the improved model makes the calculation easier and reduces the simulation time. Because the contact system is symmetrical, only half of the arc extinguishing chamber needs to be simulated. The structure of the improved model is shown in Fig. 6. In the figure, the upper part is fixed contact and the lower part is moving contact, which moves in the negative direction of the y-axis. Through the relationship between moving contact time and displacement, the change of arc re-ignition during contact movement can be obtained.

Contact structure

Simplified model of the contacts
3.2 Government Equations
Through the above simulation, the change law of arc in the arc extinguishing chamber can be obtained. The flow field can be expressed by N-S equation and energy conservation equation, and the electromagnetic field can be expressed by Maxwell equation group [10].
The mass conservation equation as shown by (1):
where \(\rho \) is the plasma density, which is related to the local temperature, t is the simulation time, and \(\overrightarrow{v}\) is the velocity vector. B is obtained by solving the N-S equation, as shown in (2).
where \({v}_{i}\) is the ith component of the velocity vector. In 2-D MHD method, it stands for x and y components of the velocity p is the pressure which is also dependent on the temperature and \(\upeta \) is the dynamic viscosity of plasma. The body force exerted on the arc plasma is the Lorentz’s force which is generated by the self-generated magnetic field provided by the arc itself as well as the external magnetic field provided by the permanent magnets. The Lorentz’s force exerted on each cell is calculated by \(\overrightarrow{J}\times \overrightarrow{B}\), here, \(\overrightarrow{J}\) is the current density and, \(\overrightarrow{B}\) is the total magnetic flux density that consists of the magnetic flux densities generated by the arc itself \({\overrightarrow{B}}_{arc}\) and that generated by the permanent magnets \({\overrightarrow{B}}_{PM}\).
Where \({v}_{i}\) is the ith component of \(\overrightarrow{v}\). In two-dimensional space, it represents the component of velocity on the x and y axes. P is the pressure, indicating the dynamic viscosity of the plasma, and its value is related to the temperature. The arc plasma is affected by Lorentz force, which is generated by the arc itself and the permanent magnet. Lorentz force on each battery is represented by \(\overrightarrow{J}\times \overrightarrow{B}\), and \(\overrightarrow{J}\) is the current density and \(\overrightarrow{B}\) is the total magnetic flux density.
Moreover, the physical property of the ambient atmosphere is closely related to the temperature. In MHD model, the solution of temperature is shown in formula (3).
where h is the enthalpy, \(\uplambda \) is the thermal conductivity, \({c}_{p}\) is the specific heat under constant pressure, \(\upsigma \) is the electrical conductivity, and E is the magnitude of the electric field strength, \(\upsigma {E}^{2}\) is the heat source for the arc which is the Joule’s heat generated by the huge current density inside the arc column.
Where h is enthalpy, \(\uplambda \) is thermal conductivity, \({c}_{p}\) is specific heat, \(\upsigma \) is conductivity, E is electric field strength, and \(\upsigma {E}^{2}\) is heat generated by large current in the arc column.
It can be seen from the above equation that each physical quantity generated by the arc itself can be obtained from (4) – (6), as follows:
where \({\upvarphi }\) is the potential and \(\overrightarrow{A}\) is the vector of magnetic potential.
3.3 Assumptions and Boundary Conditions
The arc motion is generated by the interaction of multiple physical quantities. The simulation assumptions are as follows [11, 12]:
-
(1)
The arc environment is assumed to be LTE constant.
-
(2)
Ignore the time of arc starting, and assume that the arc starts to burn steadily from 0.4 mm. Set the starting value of transient simulation as the temperature obtained by static simulation.
-
(3)
Ignore the function of arc sheath.
The boundary conditions are determined by the theoretical basis of hydrodynamics, electromagnetism and plasma. In the electric field, as shown in Fig. 5, the movable contact is represented as anode, and the fixed contact is represented as cathode. The current flows in from the anode, flows out from the cathode, and flows back to the anode through the external circuit current. Assuming that there is no current flow at the boundary of the simulation area, the calculation formula is \(\overrightarrow{n}\cdot \overrightarrow{J}=0\). In the air flow, the boundary of the simulation area is open, and the fluid can flow out of the boundary. The temperature involved in the calculation is the steady-state temperature value.
4 Simulation and Analysis
In this paper, uniform and constant transverse magnetic field is adopted, and its magnetic flux density of 40 mT, 50 mT and 60 mT is applied in simulation. The temperature change of the arc when the magnetic flux is 40 mT is shown in Fig. 7. The arc moves to the edge of the contact under Lorentz force at t = 0.86 ms, and the pre-breakdown channel appears at the root of the arc at t = 1.06 ms. At t = 1.15 ms, the luminescent plasma is transformed into arc, and the arc restriking between the contact and the arc column. Two arcs are connected in parallel way, and the resistance decreases.

Variation of arc temperature with time under 40 mT magnetic field
The simulated and measured arc voltage when the magnetic flux is 40 mT are shown in Fig. 8. The time 0 point corresponds to the time 0 of the experimental test, and the simulation starts from when the distance of contact is 0.2 mm, corresponding to t = 0.22 ms in the actual measurement. The arc voltage rises rapidly after 0.86 ms seen from the figure when the arc moves to the edge of the contact. At point 2 in the figure, at t = 1.15 ms, the voltage drops suddenly, which corresponds to point B in Fig. 7. This is mainly because the arc restriking decrease the resistance, which leads to the decline of the arc voltage and the prolongation of arcing time. The simulation calculation is consistent with the variation trend of the measured voltage curve, but there is a slight difference in the numerical value. During the movement of arc root, the measured arc voltage increase, but the trend is not obvious in the simulation, and the arc movement time in the contact is shorter. It is because the sheath is simplified in simulation and the concentration of metal vapor is different. In addition, the displacement current is ignored in the simulation model, and the arc plasma is assumed to be laminar incompressible, and only one side contact is simulated. And the starting point of the arc in the experiment is random, and the unbalanced combustion of the arc may be caused in the bridge double-breakpoint structure.

Arc voltage under 40 mT magnetic field
Based on the accuracy of simulation model, the influence of magnetic field on arc restriking is discussed. The arc voltage are simulated when the magnetic flux are 40 mT, 50 mT and 60 mT. As shown in Fig. 9, as the magnetic flux increases the arc movement time decreases and moment of rapid rise of arc voltage is advanced. It can be seen that when the magnetic flux is 40 mT, 50 mT and 60 mT, the time of the arc restriking is 1.16 ms, 1.01 ms, and 0.85 ms, respectively.
The critical breakdown field strength of arc gap which is affected by the temperature of the arc gap and distance between the contacts, is the main factor affecting arc restriking. The smaller the critical breakdown field strength is, the easier the arc gap is to be broken down. On one side, As the moving speed of the arc root increases, the critical breakdown field strength decreases. On the other side, the critical breakdown field strength increases with the increase of dielectric thickness, which is the distance between the contacts in this paper. Under different sizes of magnetic field, the arc restriking time is different, so is the distance between the contacts. The distance between contacts during arc restriking can be calculated according to the displacement-time curve of moving contacts. When the magnetic field is 40 mT, 50 mT and 60 mT, the distance between contacts is 1.010 mm, 0.852 mm and 0.768 mm, respectively. Therefore, with the increase of magnetic field, the dielectric thickness decreases, the critical breakdown field strength decreases, and the the probability of arc restriking increases.
The increase of the magnetic field has a dual effect on the movement characteristics of the breaking arc. On the one hand, the increase of the magnetic field increases the movement speed of the arc root, reduces the arc stagnation time and the metal vapor, which is beneficial to the arc movement. On the other hand, the larger the magnetic field is, the faster the arc moves, so the high temperature gas can not be emitted immediately, and the arc gap insulation strength decreases. Because the arc column moves out of the arc gap quickly and the contact gap is small, it is easy to cause dielectric breakdown and arc restriking.

Arc voltage under different magnetic field
5 Conclusion
Based on the magnetohydrodynamics (MHD) model, under the conditions of different magnetic flux density plate, this paper carries out simulation and analysis on the arc restriking characteristics. The conclusions are as follows:
-
(1)
As the magnetic flux density increases, the probability of arc restriking and erosion of the contacts increase. The simulation model in this paper can be used in finding the best magnetic flux density to shorten the arcing time and reduce the erosion of the contacts.
-
(2)
When the temperature of the arc zoneis high, there will be a large amount of silver vapor, which will hinder the arc movement and increase the probability of arc restrikin. Therefore cooling the arc can reduce the probability of arc restriking to a certain extent.
References
Zhou, X.: Simulation and Experimental Research on Breaking Arc of Aerospace Relay and its Suppression Measures. Harbin Institute of Technology (2011)
Bo, K., Zhou, X., Zhai, G.: Investigation on arc dwell and restriking characteristics in DC high-power relay. IEEE Trans. Plasma Sci. 45(6), 1032–1042 (2017)
Ma, R., Rong, M., Yang, F., et al.: Investigation on arc behavior during arc motion in air DC circuit breaker. IEEE Trans. Plasma Sci. 41(9), 2551–2558 (2013)
Fievet, C., Petit, P., Perrin, M.Y., et al.: Residual conduction in low voltage circuit breaker. In: The 11th International Conference on Gas Discharges and Their Applications. Tokyo (1995)
Ono, H., Sekikawa, J.: Arc length of break arcs magnetically blown-out at arc extinction in a DC 450 V/10 A resistive circuit. IEICE Trans. Electron. 96(9), 1132–1137 (2013)
Zhou, X., Cui, X., Chen, M., et al.: Experimental study on arc behaviors of a bridge-type contact when opening a resistive load in the range of from 280 V DC to 730 V DC. In: IEEE 60th Holm Conference on Electrical Contacts, pp. 1–7. New Orleans, LA (2014)
Zhai, G., Bo, K., Zhou, X., et al.: Investigation on breaking arc in DC high-power relays: a review. Trans. China Electrotechnical Soc. 32(22), 251–263 (2017)
Volm, D., Winkler, F.: Development of a compact relay for high voltage switching of up to 1000 V and 40 A. In: ICEC 2014 The 27th International Conference on Electrical Contacts, pp. 1–5. Dresden, Germany (2014)
Liu, Z.: Simulation and Experimental Study on Arc Movement and Arc Burning Time of Contact Breaking Process of High-power DC Relay. Huazhong University of Science and Technology (2018)
Hasegawa, M., Tokumitsu, S.: Influences of external magnetic field application and increased contact opening speeds on break arc duration characteristics of AgSnO2 contacts in DC inductive load conditions. In: 2017 IEEE Holm Conference on Electrical Contacts, pp. 200–204. Denver, CO (2017)
Hasegawa, M., Tokumitsu, S.: Break arc duration characteristics of AgSnO2 contacts under magnetic field application with contact opening speeds in the range up to 200 mm/s in DC load conditions. In: 2016 IEEE 62nd Holm Conference on Electrical Contacts (Holm), pp. 119–224. Clearwater Beach, FL (2016)
Cao, Q., Liu, X.: Simulation analysis and experimental study on arc motion of HVDC relay. J. Electr. Technol. 34(22), 4699–4707 (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Huang, X., Chen, W., Lin, J. (2023). Analysis of DC Inductive Arc Restriking Characteristics of HVDC Relays. In: Dai, D., Zhang, C., Fang, Z., Lu, X. (eds) Proceedings of the 4th International Symposium on Plasma and Energy Conversion. ISPEC 2022. Springer Proceedings in Physics, vol 391. Springer, Singapore. https://doi.org/10.1007/978-981-99-1576-7_21
Download citation
DOI: https://doi.org/10.1007/978-981-99-1576-7_21
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-1575-0
Online ISBN: 978-981-99-1576-7
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)