
Abstract
In this paper, regulation of solar fed water pumping system by Maximum Power Point Technique (MPPT) and Proportional–Integral (PI) controller is modeled. This system contains a Photovoltaic (PV) array, Buck converter controls by constant voltage controlled technique for extracting maximum power from PV array. Chopper A-type controlled by PI controller used for speed regulation of DC separately excited motor. In this system, constant voltage maximum power point tracking is employed because of its easy implementation on digital as well as on analog circuits. PI controller is used because of its simple structure and produces small steady-state error, also able to maintain reference speed. This system is developed and simulated in MATLAB/SIMULINK to analyze the performance. The outcomes obtained for the system from simulation have demonstrated satisfactory performance for different solar irradiance. It can maintain reference speed for different solar irradiance.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Buck converter
- Maximum power point tracking (MPPT)
- Photovoltaic (PV)
- Proportional–integral (PI) controller
1 Introduction
In the current situation where the price of conventional energy is growing gradually, along with the requirement for electrical energy. To fulfill the demand for electrical energy one needs to search for a cheaper and cleaner source of energy. Renewable energies like solar, wind, tidal, geothermal, etc. can meet these requirements. In countries like India where sunlight is present in abundance, the utilization of solar energy should be prioritized [1]. An increase in the price of fuels greatly affects the agriculture sector where the diesel-based generator is used for water pumping, PV standalone system can able replace diesel-based generator which not only saves money for farmers but also helps to reduce carbon footprints.
In industries, more than 40% of electrical power is consumed by electrical machines as compared to other electrical equipment present in the industry [2]. DC motor is one of the mostly used electrical machine in industries due to advantages like cheaper in cost, efficient design, full torque available at zero speed, free from harmonics, great speed regulations [3, 4]. Due to these advantages, it is mostly used in paper mills, water pumping, electrical cars and home applications. DC motor are used where the requirements are low speed variations and accuracy is high.
To extract maximum available power from solar panel, one need to employ the maximum power point technique like the constant voltage controlled MPPT algorithm [5]. It is easy to devise in analog as well as in digital circuits. Without MPPT algorithm, when DC motor is directly connected to PV array it can lose a substantial part of accessible solar energy from the PV array due to a mismatch of the meeting point of the current–voltage (I–V) curve of PV array and DC motor load line [6].
Speed control of DC motor is done by using a Proportional and Integral (PI) controller [7, 8] which triggers the gate pulse of the chopper circuit. Several researchers have proposed different techniques to control the speed of DC motor but the advantage of PI controller such as robust in terms of tracking of speed, easy to design and implementation according to the system, makes PI controller still popular in the industries.
In this paper, speed control of solar fed separately excited DC motor is done by PI controller and constant voltage controlled MPPT algorithm. The system modeling is presented in Sect. 2. Section 3 describe the results and analysis, followed by the conclusion in Sect. 4.
2 System Modeling
The suitable configuration of separately excited DC motor, PV array, Buck converter and PI controller for Solar fed system is shown in Fig. 1. The selection of building block in the system is such that it should not get affected by any external disturbances [9].

Block diagram of Solar fed separately excited motor
2.1 Design of PV Array
PV modules are configured together to form PV array to serve the electrical demand of separately Excited DC motor, Buck converter and losses of overall system by changing sunlight into electrical power [10]. PV cells are coupled in series and parallel arrangement to match the voltage, current and power demand of the overall system.
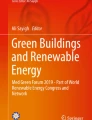
The PV array model is chosen for this study is A10 Green Technology A10J-S72-175. It consist of eight series and three parallel strings to match the demand. The characteristics of voltage (V) versus current (I) and voltage (V) versus power (W) of this PV array model for the irritation of 1000, 800, 600 W/m2 at 25 °C are shown in Fig. 2. The energy obtained from selected PV array module at 1000 W/m2 is 4.2 kW by using constant controlled voltage algorithm. Gate pulse of buck converter is triggered to acquire maximum available power. The data of selected module A10 Green technology A10J-S72-175 is shown in Table 1. The 4.2 kW PV array is designed for 3.7 kW separately excited DC motor, the excess power is need for compensating losses of motor and buck converter.

V–I and V–W characteristic of 8 × \(3 \) A10 green technology A10J-S72-175 for 1000, 800 and 600 W/m2
2.2 Constant Voltage Controlled MPPT Algorithm
In constant voltage controlled MPPT technique assume a reference voltage for MPP voltage according to voltage calculated at standard test condition (STC) given by manufacturer. The reference voltage is used for feedback control loop that employs PI controller to trigger the gate pulse of buck converter to extract maximum power available on PV array as shown in Fig. 3. In constant voltage controlled MPPT algorithm, only required measurement is voltage of PV array that makes this algorithm very easy to implement in both digital and analog circuit.

Block diagram of constant excited motor voltage control
2.3 Separately Excited DC Motor
The circuit diagram of separately excited DC motor is shown in Fig. 4. Where V is armature voltage, R is resistance of armature, L is armature inductance, E is back emf of separately excited DC motor and ia is armature current flown in DC motor.

Circuit diagram of separately excited DC motor
In separately excited DC motor field circuit is supplied from separate voltage source due to this field flux is always constant [11]. The parameter of separately excited DC motor selected in this study are as follows: Armature voltage = 240 V, Field voltage = 300 V, Speed = 1740 RPM, Power = 3740 W.
The mathematical model of separately excited DC motor is given by Eqs. (1)–(5).
where w represents speed of DC motor in rad/sec. T represent torque of separately excited DC motor in N–m. Tl represent load torque in N–m applied to separately excited DC motor. B represents friction of the DC motor. M represent inertia of separately excited DC motor in kg-m2/s2. β represent the coefficient of torque in N-m/A and α represent the coefficient of back emf in Vs/rad.
3 Simulation Result
The speed regulation of PV array fed separately excited DC motor is done by using MATLAB/SIMULINK package. A10 Green technology A10J-S72-175 PV array system is used for this study, for this eight modules in series and three strings in parallel are connected. The solar irradiance varies from 600, 800 to 1000 W/m2 as shown in Fig. 5. To study the behavior of PV array and separately excited DC motor different solar irradiance is applied.

Solar irradiance profile
To simulate water pumping system the load torque applied to DC motor is square function of speed of motor. The ratings of separately excited DC motor of permanent magnet or wound type is 240 V armature voltage, speed of rated DC motor is 1740 RPM, 300 V field voltage. Output of chopper is powering the armature of separately excited DC motor which also controls the voltage of motor, in turn control the speed of DC motor. The field circuit of separately excited DC motor is supplied by 300 V DC.
The voltage and current response of PV array is shown in Fig. 6 for varying solar irradiance and constant cell temperature at 25 ºC. The PV array voltage is constant at 293 V for different irradiance and PV array current is maximum at 1000 W/m2 which is 14.4 A. To achieve MPPT, constant voltage controlled MPPT algorithm is applied, because it only requires voltage measurement. Using mentioned MPPT technique and PI controller tuned the duty ratio of buck converter to extract maximum power available in PV array [12]. The gate circuit receive the tuned duty ratio and triggers the buck converter. The step-down voltage response of converter and input voltage applied to the converter is shown in Fig. 7.

a PV voltage current b PV array current response for varying solar irradiation

a Input voltage response to buck converter and b output voltage response of buck converter for varying solar irradiations
To extract the maximum power from PV array using constant voltage controlled MPPT algorithm, it needs standard test condition (STC) reference voltage in this case it is 293 V at 1000 W/m2. With constant voltage technique PV array reaches STC reference value in less than 0.1 s.
The step-down voltage generated from buck converter becomes the input voltage for chopper circuit. Triggering of chopper circuit is done by conventional Proportional and Integral (PI) controller which control the voltage across the armature of separately excited DC motor, in turn to control the speed of motor. For triggering of gate pulse of chopper, the reference speed is set at 1400 RPM and with the help of PI controller and Pulse Width Modulation (PWM) generator it compare with actual speed of separately excited DC motor. At starting, DC motor draws high current from DC link capacitor and settle downs when voltage in capacitor starting to reduce in turn actual speeding is increasing but at time t = 1.5 s, DC motor speed reaches to selected desired speed without any fault. Insolation of PV panel varies from 600 to 800 to 1000 W/m2 due to study the behavior of DC motor at different irradiation. In Fig. 8 speed, torque and current response of separately excited DC motor is shown.

a Speed response of DC motor b load torque response of DC motor and c armature current response of DC motor for varying solar irradiations
4 Conclusion
The PV fed speed control of separately excited DC motor using constant voltage controlled MPPT and PI controller is implemented in this work. The solar irradiance of PV array varies in step size from 600 to 800 to 1000 W/m2, it increases as well as decrease in given time. In both cases, using MPPT algorithm maximum power attained by attaining standard test condition voltage 293 V and using conventional PI controller actual speed of DC motor is able to reach reference speed 1400 RPM.
References
Shukla S, Singh B (2018) Reduced current sensor based solar PV fed motion sensorless induction motor drive for water pumping. IEEE Trans Industr Inf 15(7):3973–3986
Chauhan U, Singh V, Kumar B, Rani A (2020) An improved MVO assisted global MPPT algorithm for partially shaded PV system. J Intell Fuzzy Syst 38(5):6715–6726
Munje RK, Roda MR, Kushare BE (2010) Speed control of DC motor using PI and SMC. In: Conference proceedings IPEC, pp 945–950
Shobha Rani D, Mahankali M (2017) Boost converter fed high performance BLDC drive for solar PV array powered air cooling system. Adv Electr Electron Eng 15(2):154–168
Mohammed AE, Zahawi B, John Atkinson D (2010) Comparison of directly connected and constant voltage controlled photovoltaic pumping systems. IEEE Trans Sustain Energy 1(3):184–192
Rajan K, Singh B (2017) Solar PV powered BLDC motor drive for water pumping using Cuk converter. IET Electr Power Appl 11:222–232
Dogruer T, Nusret T (2018) Design of PI controller using optimization method in fractional order control systems. IFAC-Papers Line 51(4):841–846
Singh S, Singh B (2015) Solar PV water pumping system with DC-link voltage regulation. Int J Power Electron 7(1–2):72–85
Mani P, Mahadevan SK, Johnson AR, Kullan M (2022) An optimized design modelling of PV integrated SEPIC-based four-switch inverter for sensorless PMBLDC motor control. Automatika 63(1):90–101
Rajan K, Singh B (2017) Single stage solar PV fed brushless DC motor driven water pump. IEEE J Emerg Select Top Power Electron 5(3):1377–1385
Najet R, Hmidet A, Gammoudi R, Hasnaoui O (2015) Implementation of photovoltaic water pumping system with MPPT controls. Front Energy 9:187–198
Chauhan U, Rani A, Kumar B, Singh V (2019) A multi verse optimization based MPPT controller for drift avoidance in solar system. J Intell Fuzzy Syst 36(3):2175–2184
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Jha, A.N., Kumar, B., Tyagi, A. (2023). Solar Fed Speed Control of Water Pumping System Using Constant Voltage Controlled MPPT Technique and PI Controller. In: Rani, A., Kumar, B., Shrivastava, V., Bansal, R.C. (eds) Signals, Machines and Automation. SIGMA 2022. Lecture Notes in Electrical Engineering, vol 1023. Springer, Singapore. https://doi.org/10.1007/978-981-99-0969-8_33
Download citation
DOI: https://doi.org/10.1007/978-981-99-0969-8_33
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-0968-1
Online ISBN: 978-981-99-0969-8
eBook Packages: EnergyEnergy (R0)