
Abstract
Getting good quality power supply from the electric network is a crucial thing in recent days. Quality of power is affected due to continuous load demand variation from time to time in a day-to-day life because of technical growth. In order to overcome this drawback, an automatic generation control (AGC) scheme is introduced in power generating system. In this proposed chapter, AGC of single-area multi-source power generating system is examined by applying proportional–integral–derivative (PID) controller as a secondary controller loop. The multi-source power generating system incorporates thermal plant, hydro plant and gas power plant. The gain values of PID controller are tuned by using parameter-setting-free harmony search (PSF-HS) by applying one percent (1%) step load perturbation in system. The performance of the proposed technique is verified by comparing PSF-HS-PID controller with genetic algorithm (GA), particle swarm optimization (PSO) and harmony search (HS)-tuned controller performance. Finally, simulation result effectively proved that the proposed parameter-setting-free harmony search-tuned controller (PSF-HS-PID) yields better response in terms of minimal settling time with over- and undershoot at the time of sudden load demand over GA- PID, PSO-PID and HS-PID controller.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Automatic generation control (AGC)
- Objective function
- Proportional–integral–derivative (PID) controller
- Particle swarm optimization (PSO)
- Parameter-setting-free harmony search (PSF-HS)
1 Introduction
The power balance between total load demands with power generation keeps the quality of generated power and stability of power generating system. It can be obtained with help of implementing load frequency control (LFC)/automatic generation control (AGC) scheme in power system. The role of LFC/AGC scheme in power generating system is to keep system stability and quality of power during emergency loading circumstance. In power system, two control loops are available such as primary and secondary control loops. In these, primary control is a slow control loop, and it will keep system stability and quality of power at nominal loading situations only. When higher load demand occurs in system, the control loop generated control signal is not sufficient. At this time, secondary control loop generates the required signal to keep system operation in the predetermined value. From the literature survey, it clearly shows that several controllers are designed and implemented in power system successfully. Simultaneously, several optimization techniques for tuning of controller gain values are utilized for secondary controller gain values tuning for getting desired good power quality.
Improved sine cosine algorithm (SCA)-based adaptive fuzzy-aided proportional–integral–derivative (AFPID) controller is proposed for LFC of an autonomous power generation system (fuel cells along with energy storing units, diesel energy generator, wind turbine generator, solar photovoltaic units) [1]. Kharitonov theorem-based fuzzy logic approach designed proportional–integral controller is considered and proposed for LFC of single-area power system. Simulation result of the proposed controller is compared with conventional PID controller response [2]. Elephant herding optimization algorithm (EHOA) optimized PID controller is considered and utilized for LFC of single-area non-reheat power system. The proposed controller response is compared with genetic algorithm (GA), bacterial foraging optimization algorithm (BFOA), teaching learning-based optimization algorithm-tuned PID controller and quasi-oppositional gray wolf optimization algorithm (QOGWOA) response [3]. A hybrid stochastic fractal search plus pattern search (hSFS-PS) technique-tuned cascade PI-PD controller is proposed and investigated for AGC of multi-source single-area power system (thermal unit, hydro unit and gas power unit with plug-in electrical vehicle (PEV)). The superiority of the proposed controller is shown by comparing with optimal control, DE and TLBO techniques-tuned PI, PID and cascade PI-PID response for the identical power system [4].
Imperialist competitive algorithm (ICA) based optimization technique designed Fractional-order fuzzy PID (FOFPID) controller is applied in multi source power System. The response of controller is examined for AGC of multi-source single-/ two-area power unit (hydrothermal, gas) interconnected power system with/ without considering RFB unit in power system. This response is compared with hybrid stochastic fractal search (hSFS), pattern search (PS), differential evolution (DE), teaching learning-based optimization (TLBO) technique-tuned I, PI and PID controller response [5]. Gray wolf optimizer algorithm-tuned PID controller was designed and demonstrated for three-area interconnected AGC in power system incorporated with solar thermal power plant (STPP). The simulation response is compared with GWO-I, PI and PID controller response [6].
Adaptive set-point modulation (ASPM) method-tuned PI controller is proposed and investigated for LFC of two-area power system with HVDC link. The proposed controller response is compared with conventional controllers (PI, PID) performance [7]. Modified harmony search algorithm (MHSA)-tuned PID controller is proposed and examined for LFC of interconnected two-area hydrothermal power generating system using ITAE objective function. Simulation response of the proposed controller is compared with GA–PID response [8]. BAT algorithm-based PID controller is proposed and demonstrated for LFC of interconnected multi-area power generating system. The proposed controller simulation result is compared with fuzzy gain scheduling technique-tuned PI and conventional controller response [9].
Cuckoo search (CS) algorithm-tuned PID controller is applied in LFC of three-area interconnected power system (two-area reheat thermal systems and hydro system) which is investigated. Effectiveness of the projected technique is compared with GA, PSO-tuned I controller [10]. Genetic algorithm fuzzy system (GAF)-based polar fuzzy logic controller is investigated for LFC of three-area connected (hydro, nuclear and thermal) power generating systems. The performance was compared with fuzzy and conventional PI controller [11]. BAT algorithm (BA)-based cascade PD–PID controller is applied for multi-area reheated thermal power generating system for AGC. The performance of P, PI and PID controllers is investigated and compared with PD–PID cascade controller [12].
Beta wavelet neural network (BWNN)-supported proportional-integral plus (PI+) controller is investigated for interconnected two-area thermal power systems with and without fast-acting energy storage device such as HAE–FC and RFB in load frequency control. The performance of power system is compared with BWNN-based PID controller simulation result [13]. Proportional–integral–derivative with filter (PIDF) is designed and proposed into AGC of a multi-area thermal power system in deregulated environment. Simulation result of designed controller was compared with fuzzy logic controller response [14]. Fruit fly optimization algorithm (FFOA)-tuned I, PI, IDD, PID and PIDD controllers are designed and investigated for AGC of multi-area multi-source (combination of reheat thermal hydro, nuclear) power generating units. The proposed controller response is compared with I, PI, PID and IDD controller response [15].
The above discussed literature review analysis clearly manifests that recently, optimization techniques play a vital role in generating good quality power to consumer. The optimization techniques are used to tune gain values of secondary controllers in power generating system. Many optimization techniques are utilized to solve engineering optimization problems of power systems such as generic algorithm (GA) [16], particle swarm optimization (PSO) [16], gravitational search algorithm (GSA) [17, 18], bacteria foraging optimization (BFO) [19], firefly algorithm (FA) [20, 21], bat algorithm (BA) [12, 22], cuckoo search algorithm (CSA) [10, 23], artificial bee colony [24], hybrid genetic firefly algorithm [25], modified harmony search algorithm [26], hybrid firefly algorithm and pattern search [27], stochastic particle swarm optimization [28], ant colony optimization [29,30,31] and different combinations of controller are variable structure control [32], discrete-mode control [33], classical controller [34], fuzzy IDD controller [35], FOPID controller [36], 2DOF-PID controller [37], robust PID controller [38], fuzzy logic controller [39, 40], adaptive controller [41], PI+ controller [42], optimal control [43], dual-mode gain scheduling of PI controller [44], fractional-order controller [45], 2DOF controllers [46], PD-PID cascade controller [47], integral controller [48], conventional controller [49], fuzzy logic controller [50], PID controller [28,29,30,31] and various optimization techniques are utilized to optimize a variety of engineering issues in real-time application [51,52,53,54,55,56]. The investigation of the literature analysis effectively shows that in recent years, evolutionary computational techniques are implemented to tune controller gain values of power system application for obtaining desired performance of system. In this work, the proposed system has investigated the effectiveness and performance of PSF-HS optimization technique in multi-source power generating system. Also, the performance of the proposed method is compared with PSO, GA and HS optimized controller performance in similar multi-source single-area power generating system.
The association of the remaining proposed chapter is as follows. Sect. 1 clearly discusses about the literature review of the proposed research in detail and Sect. 2 gives the clear transfer function Simulink model of investigated single-area multi-source power generating system (comprises thermal, hydro and gas system). Sects. 3 and 4 give details about the controller and proposed optimization technique tuning process. In Sect. 5, the performance of the proposed technique is compared with GA, PSO and HS tuning method-based controller response to show the efficiency of the proposed technique-tuned secondary controller response under emergency load situation. Finally, the performance of the proposed optimization technique in proposed system is clearly presented in conclusion section.
2 Single-Area Multi-source Power System Modeling
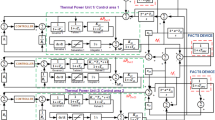
In this proposed work, AGC control of single-area multi-source power generating system is considered for investigation. Multi-source power system comprises thermal unit, hydro unit and gas generating unit. The Simulink transfer function with Simulink model of investigated power system model is shown in Fig. 1. The thermal power system includes single-stage reheat turbine. The simulation work carried out for the single-stage reheat turbine, hydro turbine and gas turbines equipped power system is considered for investigation. In this work, PID controller is applied as a secondary controller for frequency regulation of generated power by generating unit. The primary control loop available in power system does not generate required control signal at the time of emergency situation. To overcome this crisis, secondary PID controller is implemented to keep system stability and quality of generated power system. The nominal parameter values of investigated single-area multi-source power generating system are shown in Table 1, and system simulation model is given in Fig. 1.

Transfer function Simulink model of single-area multi source power system
3 Controller Design
In this work, PID controller is considered for AGC scheme in single-area multi-source power system as secondary control loop. The PID controller structure is depicted in Fig. 2, and it consists of three controller actions with respect gain values. The gain values are proportional, integral and derivative controller, and its gain values are KP, KI and KD, respectively. The input of values of PID controller is considered as area control error, and it is a linear combination of deviations in system frequency and deviation in tie-line power in between connected power system.

Structure of PID controller
Objective Function
At the time of controller gain values, optimization selection of appropriate objective function plays vital role. The objective is selected based on the requirement in system output response. In this proposed research work, ITAE cost function is implemented at the time of optimization controller gain value optimization process. The expression for ITAE objective function is given as follows (1):
For PID controller parameters (gain values) ranges are chosen in between 0 to 1, and it is given (5–7). From the earlier structure controller, it is obviously shown that area controller error (ACE) is considered as an input signal, and control signal is considered as the output of controller (UPID) and given in (4). The generated control signal by the controller depends on the ACE values. The ACE is defined as “the linear arrangement of system frequency error and error in tie-line power.” The expression for area control error is depicted in Eq. (3), and PID controller generated control signal is given in Eq. (2).
The PID controller transfer function is given as the following expression:
where
Proportional gain is Kp,
Integral gain is Ki,
Derivative gain is Kd,
Integral action time is Ti and
Derivative action time Td.
The expression of ACE is given by:
The generated control signal by each controller in each area as:
where KP, KI and KD are the minimum gain and maximum gain values of the proposed controller gain. The minimum and maximum controller gain values are chosen to be 0 and 1, respectively. The detail about the proposed optimization technique is clearly depicted into the following section, and the corresponding gain values are given in Table 2.
4 Proposed Parameter-Setting-Free Harmony Search Algorithm-Tuned PID Controller
In 2010, Geem and Sim [57] proposed parameter-setting-free harmony search algorithm which is the modified version of classical harmony search [58]. Like the other meta-heuristic algorithms, the performance of the classical harmony search is strongly dependent on the values of its parameters which are harmony memory consideration rate (HMCR) and pitch adjusting rate (PAR). Finding the optimal parameter values is a laborious task which requires expertise and knowledge about the algorithm, its parameters and the problem.
In this context, parameter-setting-free harmony search algorithm is good choice in the optimization of PID controller. Optimum value of HMCR and PAR has been selected through three operations which are random tuning, rehearsal and performance as described in the [57]. In this work, parameter-setting-free harmony search has been applied to optimize Eq. (1) for the single-area power generating multi-source model given in Figure 1. Three parameter values (p, i, d) have to be optimized according to Eq. (1). The history of the HMCR and PAR is given in Fig. 3a, b, respectively. After 300 iterations, optimum controller gain values of GA, PSO, HS and PSF-HS have been reported in Table 2.

a History of HMCR. b History of PAR
5 Simulation Results and Discussions
The proposed PSF-HS algorithm is implemented to tune gain values of PID controller in single-area multi-source power generating system. The model is developed under MATLAB\Simulink environment. The designing details of the proposed system design are given in Sect. 4. The optimal gain values are tuned by implementing optimization technique, and optimized gain values of controller gain values are given in Table 2 for investigated power system.
A 1% SLP is applied into analyzed power generating system for verification of the proposed optimization technique-based controller performance in single-area multi-source power system. The response comparison of the proposed algorithm performance is compared with the open-loop response under sudden load demand situation. The frequency deviation responses of GA-PID controller, PSO-PID controller, HS-PID controller and PSF-HS-PID controller performance verified with response of open-loop system under 1% SLP environment are depicted in Figs. 4, 5, 6 and 7, respectively. The time-domain specification parameters, peak overshoot, settling time and undershoot values, are given in Table 3 for various optimization technique-based controller performances.

System frequency changes comparison with open-loop and GA-based PID controller

System frequency changes comparison with open loop and PSO based PID controller

System frequency changes comparison with open-loop and HS-based PID controller

System frequency changes comparison with open-loop and PSF-HS-based PID controller
From the response comparisons in Figs. 4, 5, 6 and 7 in that dashed line shows the result of PSO technique-tuned controller response, and solid line shows the result of open-loop system performance under critical load disturbance situation.
Based on the response comparisons shown in Figs. 4, 5, 6 and 7, it obviously shows that the performance of system is improved compared to open-loop response of system by utilizing optimization technique for optimization of controller gain values. And also, time-domain specification numerical parameters values are shown in Table 3. In addition, the response of GA, PSO, HS and PSF-HS techniques is compared, and time-domain specification numerical parameters values are given in Table 3.
In that comparison of simulation response in Fig. 8, dotted line, dash line, dash dot line and solid lines show the performance of GA, PSO, HS and PSFHS technique-optimized controller response, respectively. From the simulation response comparison result and Table 3 indicates numerical values and it is effectively evident that proposed technique-tuned controller yield minimal settling time over GA, PSO and HS optimization technique-tuned controller response.
The bar chart comparisons in Figs. 9, 10 and 11 shows the values of peak overshoot and undershoot values, settling time for different optimization technique-tuned controllers performance under emergency load demand situation scenario.
The bar chart comparisons (Figs. 9, 10 and 11) of peak overshoot, settling time and undershoot values clearly show that the proposed PSF-HS technique-tuned controller yields better performance over GA, PSO and HS technique optimized controller performance under emergency loading conditions in power system with lesser peak magnitude of system frequency with settling time.

System frequency changes comparison with GA, PSO, HS and PSF-HS-PID controllers

Bar chart comparisons of settling different technique-tuned PID controllers

Comparisons in bar chart of overshoot with different technique-tuned PID controllers

Comparisons in bar chart of undershoot with different technique-tuned PID controllers
6 Conclusion
In this work, automatic generation control of single-area multi-source power generating system is analyzed by the inclusion of secondary PID controller. The single-area multi-source power system comprises thermal, hydro and gas power plant. The PID controller considered as a secondary controller and implemented in single-area power system to keep the power system parameters within the prescribed limit at the time of emergency situation is effectively investigated. In this work, parameter-setting-free harmony search technique is implemented to tune the PID controller gain values, and the performance of the proposed tuning technique is compared with GA technique, PSO technique and HS technique-tuned controller response. The simulation result comparison clearly shows that PSF-HS technique-based PID controller response yields better controlled response over GA, PSO and HS technique-tuned PID controller response in terms of minimal peak over- and undershoot with settling time in the response.
References
Rajesh, K. S., & Dash, S. S. (2019). Load frequency control of autonomous power system using adaptive fuzzy based PID controller optimized on improved sine cosine algorithm. Journal of Ambient Intelligence and Humanized Computing, 10(6), 2361–2373.
Golshannavaz, S., Khezri, R., Esmaeeli, M., & Siano, P. (2018). A two-stage robust-intelligent controller design for efficient LFC based on Kharitonov theorem and fuzzy logic. Journal of Ambient Intelligence and Humanized Computing, 9(5), 1445–1454.
Sambariya, D. K., & Fagna, R. (2017, July). A novel elephant herding optimization based PID controller design for Load frequency control in power system. In 2017 International Conference on Computer, Communications and Electronics (Comptelix) (pp. 595–600). IEEE.
Padhy, S., & Panda, S. (2017). A hybrid stochastic fractal search and pattern search technique based cascade PI-PD controller for automatic generation control of multi-source power systems in presence of plug in electric vehicles. CAAI Transactions on Intelligence Technology, 2(1), 12–25.
Arya, Y. (2017). AGC performance enrichment of multi-source hydrothermal gas power systems using new optimized FOFPID controller and redox flow batteries. Energy, 127, 704–715.
Sharma, Y., & Saikia, L. C. (2015). Automatic generation control of a multi-area ST–Thermal power system using grey wolf optimizer algorithm based classical controllers. International Journal of Electrical Power & Energy Systems, 73, 853–862.
Ketabi, A., & Fini, M. H. (2015). An adaptive set-point modulation technique to enhance the performance of load frequency controllers in a multi-area power system. Journal of Electrical Systems and Information Technology, 2(3), 391–405.
Shivaie, M., Kazemi, M. G., & Ameli, M. T. (2015). A modified harmony search algorithm for solving load-frequency control of non-linear interconnected hydrothermal power systems. Sustainable Energy Technologies and Assessments, 10, 53–62.
Sathya, M. R., & Ansari, M. M. T. (2015). Load frequency control using bat inspired algorithm based dual mode gain scheduling of PI controllers for interconnected power system. International Journal of Electrical Power and Energy Systems, 64, 365–374.
Abdelaziz, A. Y., & Ali, E. S. (2015). Cuckoo search algorithm based load frequency controller design for nonlinear interconnected power system. International Journal of Electrical Power and Energy Systems, 73, 632–643.
Chaturvedi, D. K., Umrao, R., & Malik, O. P. (2015). Adaptive polar fuzzy logic based load frequency controller. International Journal of Electrical Power and Energy Systems, 66, 154–159.
Dash, P., Saikia, L. C., & Sinha, N. (2015). Automatic generation control of multi area thermal system using Bat algorithm optimized PD–PID cascade controller. International Journal of Electrical Power and Energy Systems, 68, 364–372.
Francis, R., & Chidambaram, I. A. (2015). Optimized PI+ load–frequency controller using BWNN approach for an interconnected reheat power system with RFB and hydrogen electrolyser units. International Journal of Electrical Power and Energy Systems, 67, 381–392.
Gorripotu, T. S., Sahu, R. K., & Panda, S. (2015). AGC of a multi-area power system under deregulated environment using redox flow batteries and interline power flow controller. Engineering Science and Technology, an International Journal, J18(4), 555–557.
Mohanty, B., & Hota, P. K. (2015). Comparative performance analysis of fruit fly optimisation algorithm for multi-area multi-source automatic generation control under deregulated environment. IET Generation, Transmission and Distribution, 9(14), 1845–1855.
Khadanga, R. K., & Satapathy, J. K. (2015). Time delay approach for PSS and SSSC based coordinated controller design using hybrid PSO–GSA algorithm. International Journal of Electrical Power and Energy Systems, 7, 262–273.
Sahu, R. K., Panda, S., & Padhan, S. (2015). A novel hybrid gravitational search and pattern search algorithm for load frequency control of nonlinear power system. Applied Soft Computing, 29, 310–327.
Khadanga, R. K., & Satapathy, J. K. (2015). A new hybrid GA–GSA algorithm for tuning damping controller parameters for a unified power flow controller. International Journal of Electrical Power & Energy Systems, 73, 1060–1069.
Ali, E. S., & Abd-Elazim, S. M. (2013). BFOA based design of PID controller for two area load frequency control with nonlinearities. International Journal of Electrical Power and Energy Systems, 51, 224–231
Padhan, S., Sahu, R. K., & Panda, S. (2014). Application of firefly algorithm for load frequency control of multi-area interconnected power system. Electric Power Components and Systems, 42(13), 1419–1430.
Abd-Elazim, S. M., & Ali, E. S. (2016). Load frequency controller design of a two-area system composing of PV grid and thermal generator via firefly algorithm. Neural Computing & Applications 1–10.
Abd-Elazim, S. M., & Ali, E. S. (2016). Load frequency controller design via BAT algorithm for nonlinear interconnected power system. International Journal of Electrical Power & Energy Systems, 77, 166–177.
Chaine, S., & Tripathy, M. (2015). Design of an optimal SMES for automatic generation control of two-area thermal power system using cuckoo search algorithm. Journal of Electrical Systems and Information Technology, 2(1), 1–13 (In Press)
Gozde, H., Taplamacioglu, M.C., & Kocaarslan, I. (2012). Comparative performance analysis of artificial bee colony algorithm in automatic generation control for interconnected reheat thermal power system. Electric Power and Energy Systems, 42, 167–178
Farook, S., & Sangameswara Raju, P. (2012). Feasible AGC controllers to optimize LFC regulation in deregulated power system using evolutionary hybrid genetic firefly algorithm. Journal of Electrical Systems, 8(4), 459–471.
Shivaie, M., Kazemi, M.G., & Ameli, M. T. (2015). A modified harmony search algorithm for solving load-frequency control of non-linear interconnected hydrothermal power systems. Sustainable Energy Technologies and Assessments, 10, 53–62.
Sahu, R. K., Panda, S., & Padhan, S. (2015). A hybrid firefy algorithm and pattern search technique for automatic generation control of multi area power systems. Electric Power and Energy Systems, 64, 9–23.
Jagatheesan, K., Anand, B., & Ebrahim, M. A. (2014). Stochastic particle swarm optimization for tuning of PID controller in load frequency control of single area reheat thermal power system. International Journal of Electrical and Power Engineering, 8(2), 33–40 ISSN: 1990-7958.
Omar, M., Soliman, M., Abdel Ghany, A. M., & Bendary, F. (2013). Optimal tuning of PID controllers for hydrothermal load frequency control using Ant colony optimization. International Journal of Electrical Engineering and Informatics, 5, 348–354.
Jagatheesan, K., Anand, B., & Dey, N. (2015). Automatic generation control of thermal-thermal-hydro power systems with PID controller using ant colony optimization. International Journal of Service Science, Management, Engineering, and Technology, 6(2), 18–34.
Jagatheesan, K., Anand, B., Dey, N., & Ashour, A. S. (2015). Artificial Intelligence in performance analysis of load frequency control in thermal-wind-hydro power systems. International Journal of Advanced Computer Science and Applications, 6(7), 203–212.
Das, S., Kothari, M. L., Kothari, D. P., & Nanda, J. (1991) Variable structure control strategy to automatic generation control of interconnected reheat thermal system. IEE Proceedings-D, 138(6), 579–585
Kothari, M. L., Nandha, J., Kothari, D. P., & Das, D. (1989, May). Discrete-mode automatic generation control of a two-area reheat thermal system with new area control error. IEEE transactions on Power Systems, 4(3), 730–738.
Nanda, J., & Saikia, L. C. (2008). Comparisons of performance of several types of classical controller in automatic generation control for an inter connected multi-area thermal system. In 2008 Australasian Universities Power Engineering Conference (AUPEC’08), pp. 1–6.
Saikia, L. C., Sinha, N., & Nanda, J. (2013). Maiden application of bacterial foraging based fuzzy IDD controller in AGC of a multi-area hydrothermal system. Electric Power and Energy Systems, 45, 98–106.
Taher, S. A., Fini, M. H., & Aliabadi, S. F. (2014). Fractional order PID controller design for LFC in electric power systems using imperialist competitive algorithm. Ain Shams Engineering Journal, 5, 121–135.
Sahu, R. K., Panda, S., & Rout, U. K. (2013). DE optimized parallel 2-DOF PID controller for load frequency control of power system with governor dead-band nonlinearity. Electric Power and Energy Systems, 49, 19–33.
Shabani, H., Vahidi, B., & Ebrahimpour, M. (2013). A robust PID controller based on Imperialist competitive algorithm for load frequency control of power systems. ISA Transactions, 52, 88–95.
Subha, S. (2014). Load frequency control with fuzzy logic controller considering governor dead band and generation rate constraint non-linearities. World Applied Science Journal, 29(8), 1059–1066
Nanda, J., & Sakkaram, J. S. (2003). Automatic generation control with fuzzy logic controller considering generation rate constraint. In Proceedings of the 6th International Conference on Advance in Power System Control, Operation and Management, APSCOM 2003, (pp. 770–775). Hong Kong.
Swain, A. K., & Mohanty, A. K. (1995). Adaptive load frequency control of an interconnected hydrothermal system considering generation rate constraints, 76, 109–114.
Francis, R., & Chidambaram, I. A. (2015). Optimized PI+ load-frequency controller using BWNN approach for an interconnected reheat power system with RFB and hydrogen electrolyser units. Electric Power and Energy Systems, 67, 381–392
Chaine, S., Tripaathy, M., & Satpathy, S. (2015). NSGA-II based optimal control scheme of wind thermal power system for improvement of frequency regulation characteristics. Ain Shams Engineering Journal 6(3), 851–863.
Sathya, M.R., & Mohamed Thameem Ansari, M. (2015). Load frequency control using bat inspired algorithm based dual mode gain scheduling of PI controller for interconnected power system. Electric power and energy systems, 64, 365–374.
Pan, I., & Das, S. (2015). Fractional-order load frequency control of interconnected power systems using chaotic multi-objective optimization. Applied Soft Computing, 29, 328–344
Dash, P., Saikia, L. C., & Sinha, N. (2015). Comparison of performance of several FACTS devices using Cuckoo search algorithm optimized 2DOF controllers in multi-area AGC. Electric Power and Energy Systems, 65, 316–324.
Dash, P., Saikia, L. C., & Sinha, N. (2015). Automatic generation control of multi area thermal system using bat algorithm optimized PD-PID cascade controller. Electric Power and Energy Systems, 68, 364–372.
Jagatheesan, K., & Anand, B. (2012). Dynamic performance of multi-area hydro thermal power systems with integral controller considering various performance indices methods. In IEEE International Conference on Emerging Trends in Science, Engineering and Technology, Tiruchirappalli, December 13–14, 2012.
Jagatheesan, K., & Anand, B. (2014). Automatic generation control of three area hydro-thermal power systems considering electric and mechanical governor with conventional and ant colony optimization technique. Advances in Natural and Applied Science, 8(20), 25–33. ISSN: 1998-1090
Anand, B., & Ebenezer Jeyakumar, A. (2009). Load frequency control with fuzzy logic controller considering non-linearities and boiler dynamics. ACSE, 8, 15–20.
Dey, N. (Ed.) (2017). Advancements in applied metaheuristic computing. IGI Global.
Dey, N., Ashour, A., & Bhattacharyya, S. (2020). Applied nature-inspired computing: algorithms and case studies. Springer.
Das, S. K., Kumar, A., Das, B., & Burnwal, A. P. (2013). On soft computing techniques in various areas. Computer Science and Information Technology, 3, 59.
Bera, S., Das, S. K., & Karati, A. (2020). Intelligent routing in wireless sensor network based on african buffalo optimization. In Nature Inspired Computing for Wireless Sensor Networks (pp. 119–142). Springer, Singapore.
De, D., Mukherjee, A., Das, S. K., & Dey, N., Nature inspired computing for wireless sensor networks.
Kacprzyk, J. (2019). Lecture notes in networks and systems.
Geem, Z. W., & Sim, K.-B. (2010). Parameter-setting-free harmony search algorithm. Applied Mathematics and Computation, 217(8), 3881–3889.
Geem, Z. W., Kim, J. H., & Loganathan, G. V. (2001). A new heuristic optimization algorithm: Harmony search. Simulation, 76(2), 60–68.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Jagatheesan, K., Anand, B., Sen, S., Mondal, S., Samanta, S. (2021). Automatic Generation Control Scheme for Power Quality Improvement of Multi-source Power Generating System with Secondary Controller Optimization Using Parameter-Setting-Free Harmony Search. In: Das, S.K., Dao, TP., Perumal, T. (eds) Nature-Inspired Computing for Smart Application Design. Springer Tracts in Nature-Inspired Computing. Springer, Singapore. https://doi.org/10.1007/978-981-33-6195-9_2
Download citation
DOI: https://doi.org/10.1007/978-981-33-6195-9_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-33-6194-2
Online ISBN: 978-981-33-6195-9
eBook Packages: EngineeringEngineering (R0)