
Abstract
Magnetic fluid is a new type of optical functional material, which has excellent magneto-optical properties in magnetic field media. On this basis, many scholars have combined it with fiber-optic sensing technology to make a variety of fiber-optic magnetic field sensors based on interference mechanism. The technical performance of magnetic fluid fiber magnetic field sensors based on interference mechanism is analyzed, and the research status and progress of magnetic fluid-based fiber-optic magnetic field sensors are summarized and prospected in this article.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
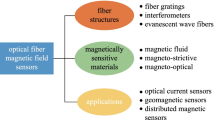
With the rapid development of the sensing technology, the magnetic field sensors have been widely used in aerospace, medicine, submarine environment detection, geological exploration, and power systems, et al. [1,2,3], and play an important role in these fields. Traditional magnetic sensors are usually electrical signal types, such as Hall magnetic sensors, magnetic-resistance sensors, and fluxgate sensors [4,5,6] which usually use metal wires to provide current excitation. The excitation current easily interferes with the magnetic field distribution which limits the improvement of detection accuracy. In addition, traditional magnetic sensors are usually large in size, cannot be miniaturized and have relatively large power consumption. The optical fiber magnetic field sensors inherit the advantages of the optical fiber sensor including small dimension, corrosion resistance, high anti-electromagnetic interference capability, convenient distributed multi-point measurement, and all-optical transmission, which have now become one of the main research directions of magnetic field sensing technology. According to different sensing principles, fiber-optic magnetic field sensors mainly have the following research directions: (1) A magnetic field sensor is achieved by coating a thin film of magnetostrictive material on the surface of the optical fiber [7, 8], (2) A magnetic field sensor is achieved by using the magnetic rotation effect of magneto-optical crystal, but it is greatly affected by the environment and polarization [9], (3) A magnetic field sensor is achieved by the combination of a cantilever beam and a fiber grating, but it is easily interfered by external media [10], (4) A magnetic field sensor is achieved by utilizing the adjustable refractivity of magnetic fluid. The magnetic field sensor based on magnetic fluid has become a research focus in recent years due to the magnetic fluid has no mechanical wear and no moving parts [11,12,13,14].
Magnetic fluid, also known as a magnetic liquid, ferro fluid or magnetic fluid, is a colloidal solution formed by magnetic nanoparticles uniformly dispersed in the base carrier fluid under the encapsulation effect of the surfactant [15]. Magnetic fluid not only has the fluidity of liquid but also the magnetic properties of solid magnetic substances, as well as rich optical properties including thermal lens effect, magneto-induced birefringence effect, and adjustable refractive index characteristics [16, 17]. Based on the adjustable refractivity of magnetic fluid, the magnetic field sensor has been used widely. The refractivity of the magnetic fluid varies with the changes of the magnetic field, showing different trends with the direction of a magnetic field. In addition, the refractive index of a magnetic fluid is also affected by temperature, which will expand the application range of magnetic field sensors based on magnetic fluid in the measurement field.
The development and the current state of magnetic fluid fiber magnetic field sensing technology based interference mechanism are summarized in this article. According to different sensing mechanisms, the sensors are divided into four categories: fiber magnetic field sensors based interference mechanisms which include Fabry–Perot interference [11,12,13], Sagnac interference [18,19,20,21,22,23], Mach–Zehnder interference [24], and mode interference mechanism [25,26,27,28]. The advantages and disadvantages of sensor mechanism, sensor structure and sensor performance are compared. Finally, the development of the magnetic field sensors based magnetic fluid is summarized and prospected in this article.
2 Optical Fiber Magnetic Field Sensor Based on an Interference Mechanism
2.1 Based on the F-P Interference Mechanism
As a multi-beam interferometer, F-P interferometer is a reflection-type interferometer which can be combined with a magnetic fluid to realize a magnetic sensor. The interference signal can be expressed as \(I^{\left( r \right)} = I_{1} + I_{2} + 2\sqrt {I_{1} I_{2} } \cos \delta\). Here \(I_{1}\) and \(I_{2}\) are the intensity of light reflected from the first and second optical planes, respectively, and \(\delta\) is the phase difference in the F-P cavity which can be expressed as \(\delta = 4\pi nL/\lambda\). Here n is the refractive index of the magnetic fluid in the F-P cavity, and L is the cavity length of the F-P cavity and λ is the wavelength of the output light. Therefore, the output signal of the F-P cavity varies with the refractive index of the magnetic fluid under the action of the magnetic field, and the magnitude of the magnetic field can be measured by measuring the change of the wavelength of output light. In 2012, Zhao et al. proposed a magnetic field sensor [11] to fill the magnetic fluid using the capillarity of HC-PCF. The HC-PCF filled with magnetic fluid was used as the F-P interference cavity. The measured magnetic field sensitivity of the sensor in the range of 50–150 Oe was 33 pm/Oe. Different F-P cavity lengths had different output spectrums, so the sensor has better multiplexing capability.
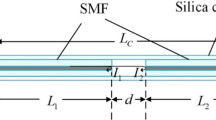
In 2014, Lv RQ et al. proposed a magnetic field sensor based on a magnetic fluid-filled fiber F-P cavity [12]. The end faces of two single-mode optical fibers constituted an F-P cavity was filled with magnetic fluid. The sensor had a magnetic field sensitivity of 43.1 pm/Oe in the range of 0–400 Oe. On this basis, Wang Dan of Northeastern University ruled FBG on one of two single-mode fibers, which solved the problem of cross-sensitization of magnetic field and temperature and improved the accuracy of magnetic field measurement [13]. The structure is shown in Fig. 1. The magnetic field sensitivity of 34 pm/Oe and the temperature sensitivity of 0.013 nm/°C were obtained. The sensor can be used in the environment where the magnetic field and temperature change at the same time.

Reprinted with permission from Ref. [13]. Copyright 2014 cnki.net
Structure with temperature compensation.
In 2018, Fuquan Shi et al. proposed an F-P interference magnetic field sensor [14]. The structure is easy to manufacture, as shown in Fig. 2. The sensing mechanism is the characteristics of magnetic nanoparticles arranged along the direction of the magnetic field. When there is a magnetic field, the coreless fiber shifts slightly with the change of the volume of the magnetic fluid. At the same time, the output optical signal will also be changed with the change of the air cavity length, thus measurement of the magnetic field can be achieved. When the direction of magnetic field was parallel to the capillary placement direction, the measured magnetic field sensitivity was 0.02347 nm/Oe. When the magnetic field direction was perpendicular to the placement direction of the capillary, the magnetic field sensitivity was 0.0325 nm/Oe.

Reprinted with permission from Ref. [14]. Copyright 2018 Optical Fiber Technology
Structure with temperature compensation.
2.2 Based on the Sagnac Interference Mechanism
The Sagnac interference structure is composed of a 3 dB single-mode coupler whose two output ends are welded together to form a ring structure. To improve the sensitivity of the sensor, a polarization-maintaining fiber is generally welded in the ring. The Sagnac interference structure can be easily combined with various other fiber-optic sensing structures to achieve high-sensitivity magnetic field measurements. Sensing mechanism of fiber-optic magnetic field sensors based on the Sagnac interference is the magnetically induced birefringence characteristics of the magnetic fluid. The reflection function of Sagnac interference ring can be expressed as \({\text{R}}\uplambda = 1 - \left[ {\sin \theta \cdot \cos 2\delta } \right]^{2} \cdot\). Here \(\delta\) is the phase difference and can be expressed as \({\updelta } = \pi BL/{\uplambda }\). Here L is the equivalent length and \({\uplambda }\) is the wavelength, and B is birefringence which includes birefringence \(B_{0}\) of polarization-maintaining fiber and birefringence \(B_{m}\) of magnetic fluid. \(B_{0}\) is determined by the polarization-maintaining fiber and is a constant. \(B_{m}\) will be changed with the magnetic field and the signal of the output light will also be changed. The magnetic field can be measured by measuring the displacement of the output spectrum. In 2011, Zu et al. proposed a Sagnac interference structure based on the birefringence of magneto fluid [18]. The sensor used a magnetic fluid film and was easy to manufacture. The magnetic field sensitivity of the 60 μm-thick magnetic fluid film in the range of 0–180 Oe was 16.7 pm/Oe. In 2014, Wang Jing of WuHan University of Technology proposed a fiber-optic magnetic field sensor based on the Sagnac interference ring [19] in which the clad of the polarization-maintaining fiber was corroded. The magnetic field sensitivity was measured in the range of 0–200 Oe was 11.31 pm/Oe. It was proposed that an unprocessed PM fiber can be welded in the Sagnac interference ring to achieve temperature compensation. The sensor can also be used as a liquid refractive index sensor. Organic glass material was used to package the sensing probe and magnetic fluid in the experiment. The volume of the sensor after packaging was larger than that of ordinary sensors because of the ring structure.
In 2014, Zu et al. proposed that combining the birefringence effect of the magnetic fluid with the Loyt-Sagnac interferometer to achieve a magnetic field sensor had higher sensitivity based [20] on their previous research [21, 22]. As shown in Fig. 3 below, the Loyt-Sagnac interferometer was a Sagnac interferometer containing two segments of high birefringence fiber (HBF). The birefringence effect of the magnetic fluid was significantly amplified because of using the Loyt-Sagnac interference structure, and the sensitivity of 592.8 pm/Oe was achieved.

Reprinted with permission from Ref. [20]. Copyright 2014 Sens.Actuators B: Chem
Loyt-Sagnac interference structure.
In 2018, Hai Liu et al. proposed a sensor based on Sagnac interference structure and D-type photonic crystal fiber [23], as shown in Fig. 4. The air holes of photonic crystal fiber were filled with magnetic fluid and the D-shaped area was coated with a gold film. The magnetic field sensitivity was and the sensitivity was effectively improved because of the combination of Sagnac interference structure and surface plasmon resonance effect. In the experiment, the magnetic field sensitivity of 0.483 nm/Oe and the temperature sensitivity of 0.1 nm/℃ were achieved.

Copyright 2018 Optical and Quantum Electronics
a, b are cross-sections of photonic crystal fibers; c is a system diagram of Sagnac interference; d is a schematic diagram of the surface plasmon resonance effect. Reprinted with permission from Ref. [23].
2.3 Based on the Mach–Zehnder Interference Mechanism
The Mach–Zehnder interferometer is also a different interference-based structure from the F-P interferometer, which is a transmissive sensor that the transmission signal can be expressed as \({\text{I}} = I_{out1} + I_{out2} + 2\sqrt {I_{out1} I_{out2} } \cos (\delta + \delta_{0} )\). Here \(I_{out1}\) and \(I_{out2}\) is the output light intensities of the two cores, and \(\delta_{0}\) is the initial phase difference. \(\delta\) can be expressed as \({\updelta } = 2\pi L\Delta n/{\uplambda }\). Here L is the length of micro-cavity and Δn is the refractive index difference, and λ represents the output light wavelength. The magnetic measurement of the Mach–Zehnder interference sensors based on magnetic fluid can be achieved using the change of refractivity of the magnetic fluid. In 2015, Li of ShenZhen University proposed a Mach–Zehnder interference structure included magnetic fluid and the dual-core fiber in which a microcavity was made [24]. The magnetic field sensitivity of −37.1 nm/Oe was achieved, but the magnetic field measurement range of 0–80Oe was achieved.
2.4 Mode-Based Interference Mechanism
Previous studies are various about fiber-optic magnetic field sensors based on the mode interference mechanism. Such as sensors with tapered shape structure, sensors of single mode-fine core-single mode structure and single mode-multimode-single mode structure, et al., all belong to the sensors based on the mode interference mechanism. The sensor is generally melted and tapered or made a core-offset structure, and the core fundamental mode excites high-order modes at a fusion plane and mode coupling occurs at the second fusion plane, so which is essentially also a sensor of Mach–Zehnder interference mechanism. When the two interference modes meet certain phase conditions which is \(2{\uppi }\left[ {n_{eff}^{co} \left( \lambda \right) - n_{eff}^{cl,j} \left( {\lambda ,n_{ext} } \right)} \right]\left( {L/\lambda_{D} } \right) = \left( {2k + 1} \right)\pi\), there will be a transmission valley which is affected by the refractive index of the external environment. When the external environment is the magnetic, the refractive index of magnetic fluid will change. So the magnitude of the magnetic field can be obtained by measuring the drift of the interference trough. Here \(n_{eff }^{co}\) and \(n_{eff}^{cl,j}\) is the effective refractive index of the fundamental mode and the j-th order cladding mode, respectively, and \(n_{ext}\) is the effective index of the environment, and L is the length of the sensing area, and \(\lambda_{D}\) is the wavelength of the interference valley, and k is integer. In 2014, Layeghi and others proposed a magnetic field sensor with a tapered structure [25]. The tapered fiber structure was coated with a layer of magnetic fluid and sealed in the capillary tube, which can be made small. The magnetic field sensitivity of −71.7 pm/Oe was achieved. Shengli Pu et al. proposed a sensor with a tapered joint [26], as shown in Fig. 5. The magnetic field sensitivity of 32.53 pm/Oe was achieved ranging from 0 to 160 Oe.

Reprinted with permission from Ref. [26]. Copyright 2014 IEEE Photonics journal
Sensor with tapered joint.
In 2016, Liang of Zhejiang University achieve magnetic field measurement combined cladding-etched thin-core fiber and magnetic fluid [27]. The sensor can achieve dual parameter measurements of the magnetic field and temperature, and the magnetic field sensitivities of 128 pm/Oe and the temperature sensitivities of 12.23 pm/°C were achieved. The structure is shown in Fig. 6.

Reprinted with permission from Ref. [27]. Copyright 2016 cnki.net
Schematic diagram of TCFMI structure of cladding corrosion by magnetic fluid coating (right: Schematic diagram of TCFMI structure of cascaded FBG).
In 2017, Yue designed a fiber-optic magnetic field sensor based on peanut cone and multimode fiber structure [28]. The two ends of the single-mode fiber engraved long-period fiber grating and the multimode fiber were melt-balled to make peanut cone structures. In the experiment, the magnetic field sensitivity of 47.8 pm/Oe and the temperature sensitivity of 0.06 nm/°C were obtained.
3 Summary
The magnetic field sensitivity, measurement range, and magnetic field measurement mechanism of fiber-optic magnetic field sensors based different interference mechanisms are summarized, as shown in Table 1. The measurement mechanism of magnetic field sensors is generally achieved by measuring the change of wavelength. For the packaging of sensors, which is packaged with an organic glass when the sensing probe is a ring structure, for others sensors, with a capillary for packaging. For the filling of magnetic fluid, previous studies achieves filling through capillary action or the pressure of syringe.
4 Summary and Prospect
At present, the technology of fiber-optic magnetic field sensing based on the magnetic fluid is in the laboratory research stage. There are still some aspects that need to be improved:
-
1.
Optical fiber Micromachining technology, commonly used focuses particle beam or Fs Laser micromachining is complex and costly. And the traditional semiconductor planar micromachining technology is not suitable for the three-dimensional micromachining of optical fibers, it is necessary to develop technological methods suitable for optical fiber three-dimensional micromachining.
-
2.
The effective filling of the magnetic fluid is a difficult point of the micro-structure fiber sensor technology, which determines the performance of the sensor to a large extent, so it is necessary to develop more effective and low-cost magnetic fluid filling methods.
-
3.
The packaging technology of fiber magnetic field sensors based on magnetic fluid needs to be strengthened and improved, which determines the performance and lifetime of the sensor, as well as the level of sensor development costs.
-
4.
The magnetic fluid materials which have high viscosity, slow response time and are not easy to fill and package is commonly used. The performance of magnetic fluid materials is a key element of fiber-optic magnetic field sensors. Therefore, new magnetic fluid materials which have faster dynamic response time, proper viscosity, and easy filling and packaging need to be developed.
Consider the temperature characteristics of magnetic fluids, fiber-optic magnetic field sensors based on magnetic fluids are sensitive to temperature. To solve the problem of temperature and magnetic field cross-sensitivity, many research reports have adopted some methods including using fiber grating structure and injecting temperature-sensitive liquid to achieve the dual parameter measurement of the magnetic field and temperature. Temperature-sensitive packaging material can also be used to improve temperature sensitivity. Therefore, magnetic field sensor based on magnetic fluid should not only be limited to measure the magnetic field, but its function can also be extended to the field of temperature measurement to achieve high utilization of the sensor.
Magnetic fluid not only has an adjustable magneto-refractive index and temperature characteristics but also has the magnetic characteristics of solid magnetic materials. The nanoparticles are arranging along the direction of the magnetic field, so the direction of the magnetic field has influence on the magnitude of the magnetic field. At present, the research on magnetic field measurement mostly focuses on the measurement of the magnitude of the magnetic field, while the research on the measurement of the magnetic field direction is less. Consider the difference between the actual environment and laboratory measurement conditions, the direction of the magnetic field must be considered in actual measurement, which is the direction of the magnetic field is known before measuring in the laboratory but the magnitude and direction of the magnetic field are unknown during the actual measurement. Although the study of the direction of the magnetic field is less in previous sensors, the sensors have a certain sensitivity to the direction of the magnetic field because of the magnetic properties of the magnetic fluid. It is hoped that the sensitivity of magnetic field directional of the sensor can be used as an important index to measure the sensing performance to expand the application range of the sensor in the field of magnetic field measurement in future research.
References
Xiao XY, Zhou WS (1999) Domestic progress in the biological effects of magnetic fields. Chin J Physiotherapy 3(1):6–9
Zhou Z (2006) Effect of magnetic fluid accumulation on the targeting of magnetic drugs. MA. Sc. Theses, Chinese Academy of Sciences, Institute of Electrical Engineering
Gitter K, Odenbach S (2011) Quantitative targeting map based on experimental investigations for a branched tube model in magnetic drug targeting. J Magnetism Magnetic Mater 323:3038–3042
Ripka P (2003) Advances in fluxgate sensors. Sens Actuators A 106:8–14
Hauser H, Hochretter J, Stangl G et al (2013) Anisotropic magnetoresistance effect field sensors. J Magnetism Magnetic Mater 215(216):788–791
Paun MA, Sallese JM, Kayal M (2012) Offset and drift analysis of the hall effect sensor. Digest J Nanomater Biostructures 7(3):883–891
Yang M, Dai J, Zhou C et al (2009) Optical fiber magnetic field sensors with TbDyFe magnetostrictive thin films as sensing materials. Opt Express 17(23):20777–20782
Liu JY, Si YM, Li ZZ et al (2004) Fiber magnetic field sensor using giant magnetostrictive film. Photoelectric Technol Appl 25(03):238–241
Zhu J (2013) Research on magnetic field measurement of optical fiber-based on magneto-optical crystal. MA. Sc. theses, Zhejiang University
Liu J (2006) MEMS cantilever magnetic field sensor and resonant cantilever beam electromagnetic drive technology. MA. Sc. theses, Shanghai Institute of Microsystem and Information Technology, Chinese Academy of Sciences
Zhao Y, Lv R, Ying Y, Wang Q (2012) Hollow-core photonic crystal fiber Fabry-Pérot sensor for magnetic field measurement based on magnetic fluid. Opt Laser Technol 44(4):899–902
Lv RQ, Zhao Y, Wang D et al (2014) Magnetic fluid-filled optical fiber Fabry-Pérot sensor for magnetic field measurement. IEEE Photonics Technol Lett 26(3):217–219
Wang D (2014) Research on novel fiber optic Fabry-Perot magnetic field sensor based on magnetic fluid. MA. Sc. theses, Northeastern University
Shi F, Yan L, Che J et al (2018) Optical fiber F-P magnetic field sensor based on the magnetostrictive effect of magnetic fluid. Opt Fiber Technol 43:35–40
Li DC (2003) Magnetic liquid sealing theory and application. Science Press, Beijing, pp 109–152
Zhao Y, Dong JL, Li X (2009) Optical properties of magnetic fluids and their applications in the field of photoelectric information sensing. Photoelectric Eng 36(07):126–131
Pu S, Chen X, Liao W et al (2004) Laser self-induced thermo-optical effects in a magnetic fluid. J Appl Phys 96(10):5930–5932
Zu P, Xiang WH, Bai YB et al (2011) A novel magnetic liquid-based sagnac magnetic field sensor. J Opt 31(08):57–61
Wang J (2014) Fiber-optic magnetic field sensor based on magnetic fluid and high birefringence ring mirror. MA. Sc. theses, Wuhan University of Technology
Zu P, Chan CC, Koh GW et al (2014) Enhancement of the sensitivity of magneto-optical fiber sensor by magnifying the birefringence of the magnetic fluid film with Loyt-Sagnac interferometer. Sens Actuators B: Chem 191:19–23
Zu P, Chan CC, Jin YX et al (2011a) A temperature-insensitive twist sensor by using low-birefringence photonic crystal-fiber-based Sagnac interferometer. IEEE Photonics Technol Lett 23:920–922
Zu P, Chan CC, Jin YX et al (2011b) Fabrication of a temperature-insensitive transverse mechanical load sensor by using a photonic crystal fiber-based Sagnac loop. Meas Sci Technol 22(2):0957–1233
Liu H, Li H, Wang Q et al (2018) Simultaneous measurement of temperature and magnetic field based on surface plasmon resonance and Sagnac interference in a D-shaped photonic crystal fiber. Opt Quantum Electron 50:392
Li ZY (2015) Mach-Zehnder interferometer based on twin-core fiber and sensing applications. MA. Sc. theses, Shenzhen University
Layeghi A, Latifi H, Frazer O (2014) Magnetic field sensor based on nonadiabatic tapered optical fiber with magnetic fluid. IEEE Photon Technol Lett 26(9):1904–1907
Pu S, Dong S (2014) Magnetic field sensing based on magnetic-fluid-clad fiber-Optic structure with up-tapered joints. IEEE Photonics J 6(4):5300206
Zhang L (2016) Magnetic fluid magnetic field sensing based on magnetic fluid. MA. Sc. theses, Zhejiang University
Zhao Y (2017) Research on interferometric optical fiber sensor based on peanut cone structure. MA. Sc. theses, Tianjin University of Technology
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Liu, Y., Liu, Y., Xu, C. (2021). Review of Magnetic Fluid Fiber Magnetic Field Sensing Technology Based on Interference Mechanism. In: Peng, Y., Dong, X. (eds) Proceedings of 2019 International Conference on Optoelectronics and Measurement. Lecture Notes in Electrical Engineering, vol 726. Springer, Singapore. https://doi.org/10.1007/978-981-33-4110-4_15
Download citation
DOI: https://doi.org/10.1007/978-981-33-4110-4_15
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-33-4109-8
Online ISBN: 978-981-33-4110-4
eBook Packages: EngineeringEngineering (R0)