
Abstract
Bus lane capacity is undoubtedly an essential ingredient in the planning, design and operation of bus corridors. Among the various factors influencing the bus lane capacity, bus arrival rate has been underexplored. Therefore, this study focusses on assessing the impact of eight different arrival rates on bus lane capacity. To achieve this aim, a simulation model is developed, and two simulation experiments were performed. One with fixed dwell time and varying arrival rates, and second with fixed arrival rate and varying dwell time. To compute the capacity, transit capacity and quality of service manual (TCQSM) model is selected. Based on the analysis, as the arrival rate increases, the bus lane capacity increases at the cost of increase in the queue length. Furthermore, for a fixed arrival rate, when the dwell time decreases, the bus lane capacity increases. From the practitioners’ and policy makers’ viewpoint, the findings of this study highlight the importance of judiciously selecting an arrival rate.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
As the demand for transportation is increasing, the needs for sustainable modes become more evident. An efficient bus rapid transit system (BRTS) is a boon for cities, which are ridden with innumerable transportation problems due to increase in traffic density, population explosion, the concentration of economic activities in central business districts and poor urban planning. From the transit user’s perspective, BRTS offers enhanced frequencies, increased system reliability and a reduction in travel time and delays. BRTS capacity is a critical factor that impacts bus frequency, system reliability, and lower travel time. Therefore, the success of a BRTS heavily relies on its capacity.
BRTS capacity is dictated by the bus lane capacity and the passenger capacity. It also reflects the interaction between the passenger flow and the bus flow. The bus lane capacity is defined as a maximum number of buses which can utilise the facility in an hour. As per National Academies of Sciences [1], the bus lane capacity is governed by the loading area capacity. In general, firstly, loading area capacity of a bus stop is calculated; secondly, bus stop capacity is calculated depending on the number of loading areas present at the bus stop; thirdly, the first two steps are repeated to evaluate the capacity of all the bus stops present on the bus lane; fourthly, the critical bus stop is identified (the bus stop with the least capacity is termed as the critical bus stop); and finally, the bus lane capacity is calculated which is equal to the critical bus stop’s capacity [1]. Hereafter, critical bus stop capacity is referred as bus lane capacity.
In order to calculate the bus lane capacity, various mathematical and simulation models are available in the literature [1,2,3,4,5,6,7,8,9]. However, it is still unclear which model should be preferred when computing the bus lane capacity. Furthermore, a comprehensive review of these models is missing in the literature. Synthesis of the literature further reveals that most of the research studies focussed on how lane capacity is impacted by the dwell time [10], failure rate [7], signalised intersection [11], etc. Another important factor which impacts the bus lane capacity is bus arrival rate (AR) [12, 13]. Surprisingly, this factor is still underexplored.
Motivated by the aforesaid research needs, the present study first reviews three of the most popular models, reports their features and unfolds their specific limitations. Furthermore, this study aims to investigate the impact of bus arrivals on the bus lane capacity. A comprehensive understanding of ARs will assist the practitioners and policymakers to fix a particular AR or opt for time adaptive ARs with the objective of maximising the bus lane capacity and minimising the queue length at the bus stop. In the present study, nine different ARs are investigated by using a simulation model.
The remaining of the paper is organised as follows. Section 2 reviews the bus lane capacity estimation models. Section 3 describes the methodology and Sect. 4 discusses the results and findings. The conclusions drawn from the study and the future work are presented in Sect. 5.
2 Bus Lane Capacity Estimation Model
Intuitively, before developing a new model or implementing a particular model, it is of utmost importance to evaluate the models and comprehend their pros and cons. Thus, in this section, only three (due to space constraints) but most cited capacity estimation models are reviewed. Table 1 presents different features and limitations of these models. Highly preferred TCQSM model to estimate the lane capacity has two major limitations: (a) ignorance of complex stochastic process noticeable at the bus stop, for example, passenger movements, bus arrival and departure; (b) underprediction of stop capacity values as compared to the field observations. The TCQSM model still can be applied to the bus stops with non-complex passenger–bus interactions. Based on the review, we conjecture that there is a need for developing a reliable, robust and realistic capacity estimation model. In this regard, the important elements which fully specify the bus stop [12] and shall be considered when computing the bus lane capacity are as follows:
-
The bus stop area and the platform
-
Berth configuration (linear, sawtooth, parallel, etc.)
-
Utilisation of berths
-
Single or multiple stops
-
Character of the stop (mandatory or optional)
-
Entry and Exit discipline to the stop area (First In First Out (FIFO) or overtaking allowed)
All these factors impact the passenger–bus interaction.
To investigate the impact of AR on the bus lane capacity, this study adopts TCQSM model to compute the capacity. Importantly, to enhance the applicability of the model and lessen the impact of its limitations, this study focusses on a section of a one-lane busway with one on-line stop constituting single loading area and no traffic signal. This is critical because the primary aim of this study is to comprehend how AR impacts bus lane capacity rather than developing a new model.
There are two important components of TCQSM model, namely the dwell time and the failure rate. The dwell time at a bus stop begins when the bus arrives and stops at the stop, and ends when the bus leaves the stop [14]. As per TCQSM, the dwell time is calculated as the sum of boarding and alighting time, door opening and closing time, and passenger service time. The other component, failure rate is defined as the probability of finding all the loading areas occupied when a bus arrives at the bus stop. In this study, the failure rate is calculated in percentage as total time spent by all the buses in queue divided by 3600 and incorporated using \( Z \), same as TCQSM. Furthermore, as there is no traffic signal, the \( g/C \) ratio is equal to 1. Since the bus stop consists of a single birth, \( N_{\text{el}} \) is equal to 1. The \( t_{\text{c}} \) is assumed to be equal to 10 s.
3 Methodology
Before detailing the methodology, it is important to define bus ARs. The AR in this study is defined as the rate with which buses will arrive at the bus stop if there is no queue at the bus stop. For example, if the AR is 5 min, then the buses arrive 5 min apart.
3.1 Simulation Model Development
A microscopic single bus lane simulation model is developed in AIMSUN 6.1 [15]. AIMSUN has been successfully used previously for evaluating bus lane capacity [2].
The geometric configuration of the model and a 3-D visualisation are presented in Fig. 1. As follows from the figure, the bus lane constitutes of an on-line bus stop with single loading area. Other features of the simulation model are presented in Table 2.

AIMSUN simulation model. a 3-D visualisation of the section near the bus stop; b geometric configuration of the bus lane section
Simulation 1
In the first simulation, the mean AR is varied from 1 to 5 min with a 30 s increment, and the standard deviation of AR is fixed to 30 s. Bus arrivals are assumed to be normally distributed. For each AR (total eight), the simulation is run for one hour, the dwell time was fixed to 120 s, and the passenger boarding time and the alighting time were fixed to 1.2 and 0.8 min, respectively. The opted dwell time, and boarding and alighting time have been observed on the bus stations of Bhopal BRT corridor [7]. Corresponding to each AR, the failure rate, the number of buses in the queue and the total time in queue (TTQ) were calculated from the simulation, and the capacity is evaluated using TCQSM model.
The TTQ is defined as the total time spent by all the buses in the queue at the bus stop. The mathematical formulation of TTQ is given by Eq. (1):
where \( i \) is the bus number according to their entry in the simulation \( \left( {i = 1, 2,3, \ldots ,n} \right) \), \( n \) is the bus number representing the last bus in the simulation, and \( t_{i} \) is the time spent by the ith bus in the queue at the bus stop.
Simulation 2
The second simulation is performed with the objective of inspecting the impact of dwell time on bus lane capacity for a fixed AR. This is to mimic the scenario when an AR is fixed for the buses running on a bus lane and the passenger flow has changed over the months. Four simulation runs are carried out each with a different dwell time value. The dwell times employed are 120, 50, 40, and 30 s, and the fixed AR is 1.5 min. Similar to the simulation 1, the failure rate, the number of buses in the queue, and the TTQ are calculated from the simulation; the capacity is evaluated using TCQSM model. The factors impacting the AR, for example, passenger demand, are out of the scope of this paper and the considered mean AR can be assumed as fixed by the relevant public transit agency after considering all the factors.
4 Results and Discussion
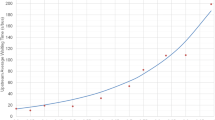
Figure 2 depicts the trajectories of buses for all the eight ARs. Although the trajectory plots have been utilised in traffic flow modelling from decades, these are rarely preferred in demonstrating the bus operations. Evidently, from the figure, the trajectory plots are an effective way to describe where the bus has stopped, the location of the bus stop, the queue at the bus stop, and the total travel time of the bus.

Space–time variation of the buses during the simulation period corresponding to each AR
From Fig. 2, it is straightforward to observe that AR of 1 min resulted in long queues. As expected, the queue length decreases as AR decreases (moving from AR 1 min to AR 5 min).
The estimated capacity and other results are presented in Table 3. The largest capacity achieved is 49 buses/h, and this capacity corresponds to the ARs of 1 and 1.5 min. Moreover, for the AR of 1 min, the TTQ is the largest. These two findings are important from the bus scheduling viewpoint. For example, the practitioners can opt for an AR of 1.5 min which leads to a substantial reduction in TTQ without compromising with the bus lane capacity.
Furthermore, we conclude that for a fixed dwell time, there exists an inflection AR interval below and above which the bus lane capacity is constant. For the presented case, the inflection AR interval is 1.5–2.5 min. Therefore, developing on these findings, an appropriate AR can assist in achieving the desired bus lane capacity.
The results of simulation 2 are summarised in Table 4. As follows from the table, for a fixed AR, the TTQ and the failure rate increases if the dwell time increases. The highest bus lane capacity observed is 65 buses/h for a dwell time of 30 s. To highlight the importance of this simulation, consider a situation where the AR of buses is fixed for a bus lane by taking into account the existing dwell time.
Over the period, if this dwell time increases, the fixed AR will not serve the purpose and will result in lower bus lane capacity values. Thus, before fixing an AR for a bus lane, the changes in dwell time or the dwell time pattern over the months shall be considered.
Above-mentioned findings unfold the need for passenger demand-dependent AR which can ensure a lower TTQ and a higher bus lane capacity.
5 Conclusion and Future Work
This study investigates the impact of AR on bus lane capacity. To achieve this, a simulation model is developed in AIMSUN 6.1, and two simulation experiments are performed. The first simulation experiment attempts to analyse how bus lane capacity changes with a change in bus AR. On the other hand, the focus of the second simulation experiment is to analyse how changes in the passenger flows (reflected by the change in dwell time) impact the bus lane capacity for a fixed AR. The results of the first experiment reveal that for a fixed dwell time at a bus stop, lower AR (moving from 1 to 5 min) leads to lower delays at the bus stop but at the cost of reducing the bus lane capacity. Moreover, for a fixed AR, if the dwell time increases, bus lane capacity decreases as demonstrated by the results of the second experiment. Based on these findings, a passenger demand-dependent AR can serve the purpose of maximising the bus lane capacity and minimising the delays in the queue. Also, from the practitioners and policymakers viewpoint, a particular AR shall be judiciously selected keeping in mind the possible changes in the dwell time over a long-time period.
Furthermore, estimating bus lane capacity of BRTS is imperative for decision-makers and planners. The main reason is to determine the state beyond which the capacity cannot be increased further without making design changes in the bus lane. This study showcases (by pointing out the limitations of the existing models) the need for reliable, robust and realistic capacity estimation models which are capable of incorporating a wide variety of stochasticity present on the bus lane. For example, stochastic passenger flow, the number of loading areas, bus ARs, etc. From the modelling perspective, simulation models can simulate a wide variety of scenarios and therefore they have an edge over simplified mathematical models. However, the mathematical models present at the core of the simulation packages still require improvements.
Understanding different factors impacting AR and thereby bus lane capacity could provide valuable insights. This is a topic of future research.
References
National Academies of Sciences E (2013) Transit capacity and quality of service manual, 3rd edn
Widanapathiranage R, Bunker JM, Bhaskar A (2015) Modelling the BRT station capacity and queuing for all stopping busway operation. Public Transp 7:21–38
Fernandez R (2001) A new approach to bus stop modelling. Traffic Eng Control 42:240–246
Szasz PÁ, de Carvalho Montans L, Ferreira EO (1978) COMONOR: ordinated bus convoy. Companhia de Engenharia de Tráfego
Ortiz MÁ, Bocarejo JP (2014) Transmilenio BRT capacity determination using a microsimulation model in VISSIM. Presented at the transportation research board 93rd annual meeting of transportation research board, National Academics, Washington, DC
Siddique A, Khan A (2006) Microscopic simulation approach to capacity analysis of bus rapid transit corridors. J Public Transp 9
Sharma A, Parida M, Sekhar CR, Kathuria A (2015) Capacity analysis of Bhopal BRTS using empirical and simulation model. J East Asia Soc Transp Stud 11:1575–1593
Hsu T-P, Lu C-T (1999) Bus lane capacity—a revised approach. J East Asia Soc Transp Stud 3:381–395
Gu W, Li Y, Cassidy MJ, Griswold JB (2011) On the capacity of isolated, curbside bus stops. Transp Res Part B Methodol 45:714–723
Jaiswal S, Bunker J, Ferreira L (2010) Influence of platform walking on BRT station bus dwell time estimation: Australian analysis. J Transp Eng 136:1173–1179
Gibson J (1996) Effects of a downstream signalised junction on the capacity of a multiple berth bus-stop. Presented at the traffic management and road safety. In: Proceedings of seminar held at the 24th European transport forum, vol P407, Brunel University, England, 2–6 Sept 1996
Gibson J, Baeza I, Willumsen L (1989) Bus-stops, congestion and congested bus-stops. Traffic Eng Control 30
Fernandez R, Planzer R (2002) On the capacity of bus transit systems. Transp Rev 22:267–293
Reilly J, Aros-Vera F (2013) Estimating capacity of high volume bus rapid transit stations. Presented at the 92nd annual meeting of transportation research board, National Academics, Washington, DC
TSS (2010) AIMSUN 6.1 microsimulator and mesosimulator user’s manual
Acknowledgements
The authors would like to thank Dr. Ashish Bhaskar for his support in developing the simulation model, and anonymous reviewers for insightful and constructive comments.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sharma, A., Parida, M., Ravi Sekhar, C., Choudhary, J. (2020). Assessing the Impact of Bus Arrival Rate on the Bus Lane Capacity: A Simulation-Based Approach. In: Mathew, T., Joshi, G., Velaga, N., Arkatkar, S. (eds) Transportation Research . Lecture Notes in Civil Engineering, vol 45. Springer, Singapore. https://doi.org/10.1007/978-981-32-9042-6_3
Download citation
DOI: https://doi.org/10.1007/978-981-32-9042-6_3
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-32-9041-9
Online ISBN: 978-981-32-9042-6
eBook Packages: EngineeringEngineering (R0)