
Abstract
Traffic congestion might be partly solved by using autonomously driving vehicles which are expected to enter the market at a significant rate within the next years (Kaltenhäuser et al. in Transp Res Part A: Policy Pract 132:882–910, 2020, [1]; Bansal and Kockelman KM in Transp Res Part A: Policy Pract 95:49–63, 2017, [2]; Nieuwenhuijsen et al. in Transp Res Part C: Emerg Techno 86:300–327, 2018, [3]). Several studies have been undertaken to examine the impact of autonomous vehicles (AVs) on road traffic. Also, autonomous vehicles and connected autonomous vehicles (CAVs) have been simulated in the literature with different operational parameters, leading to different results. Hence, in our study we examine how different parameters for the operation of AVs and CAVs influence urban traffic in the case of Munich, Germany. Furthermore, the impact of different percentages of AVs and CAVs on urban traffic is studied. For this, the traffic will be studied for the whole city, as well as for certain travel routes, e.g. in the main travel direction (into the city in the morning), in opposite direction or along the highway surrounding Munich. Last but not least, future scenarios with an enhanced travel behaviour will be studied. The results show that the headway and reaction times of the vehicles have the largest impact on urban traffic. Here, vehicles with large reaction times have a negative impact on urban traffic while short reaction times have a positive one. The results can be used to configure future AVs such that they reduce congestions and optimize urban traffic flow.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Problem Statement
At present, the automotive industry is undergoing a significant change, mainly due to the large-scale introduction of electric and hybrid drives, shared mobility and individual mobility offers. The biggest social changes, however, will arise from the development of autonomous driving. Initially, it will be just an optional feature where the driver is still in control of the vehicle, but, on the contrary, with the introduction of autonomous taxis without a steering wheel, as proposed e.g. by Waymo, the technology will soon have a key influence on daily life. Besides the usage prediction of all these types of mobility, the impact of autonomously driven vehicles on urban and intercity traffic is a major field of investigation. Most authors focus on single and double lane traffic as it is found on highways, where to our knowledge, only three publications have studied urban traffic: Bailey [4], Yeola et al. [5] and Mavromatis et al. [6].
2 Research Objectives and Motivation
Hence, in our study we examine how different parameters for the operation of AVs and CAVs influence urban traffic in the case of Munich, Germany. These parameters are as different as the headway time, the acceptance of speed limits, or the acceptance of small (risky) gaps for overtaking manoeuvers. The influence of the parameters will be studied for the traffic in total as well as for certain travel routes, e.g. in the main travel direction (into the city in the morning), in opposite direction or along the highway surrounding Munich. The used key performance indicators are the travel time, the harmonic average speed and the delay time. Furthermore, the impact of different percentages of AVs and CAVs on urban road traffic will be studied. The results might be used to configure future AVs such that they reduce congestions and optimize urban traffic flow.
3 Literature Review
Several studies that examine the impact of autonomous vehicles on traffic have been undertaken. Table 1 shows a summery of the literature. As most studies focus on highways or straight road strips, these are shown first, followed by the three studies examining urban road traffic and then two studies examining platoons in urban traffic. As the headway time (HWT] chosen for the AVs is the most important parameter in most publications, the studies are sorted according to this parameter first. Afterwards, studies using different parameters for the simulation of AVs are shown, followed by studies using different KPIs.
It can be seen that a lot of studies simulated AVs and CAVs on single and double lane roads. Also, lots of parameters have been used for the definition of AVs and CAVs and the parameters could be used in this study. Furthermore, the literature on KPIs is thorough and the KPIs can be used for this study. However, as the literature on the impact of autonomous driving vehicles on urban road traffic is quite sparse, this will be the main topic of the traffic simulation.
In the following, a more detailed survey of the literature is given, following the order of Table 1.
Studies showing increasing and decreasing traffic flow according to the headway time
Krause et al. [8] and Hartmann et al. [9] examined the impact of AVs and CAVs on highway capacity using VISSIM. Compared to AVs, human drivers were simulated with a higher variance in the HWT, centered for both around 1.1 s. In contrast, CAVs used a lower HWT (0.5 and 0.9 s), but only to other CAVs, while AVs used a longer HWT (1.8 s). The simulations have shown that AVs reduce highway capacity while CAVs increase it, mainly due to the modified HWT. The effects increased with a higher percentage of the respective vehicles, with CAVs increasing the road capacity by up to 30%.
Also, Papamichail et al. [10] have shown that the HWT (0.8–2 s) has an impact on road capacity on a single lane road. Here, a shorter HWT resulted in a higher capacity and vice versa. Ntousakis et al. [11] found that highway capacity increases linearly with the penetration rate of adaptive cruise control (ACC) vehicles with desired time gaps less than 1.1 s. Likewise, the capacity decreased for desired time gaps exceeding 1.5 s. Here, the car-following model proposed by Wang and Rajamani [12] was used.
Studies showing an increasing traffic flow, most of them due to short headway times
Aria et al. [13] have used VISSIM to simulate a 3 km long highway including drive-ups. With the usage of CAVs with a HWT of 0.3 s, the average speed increased and in return the travel time was reduced. Due to the higher velocity, less vehicles were using the road at the same time. Motamedidehkordi et al. [14] have simulated a 8.5 km strip on the German highway A5. Here, the road capacity increased with a higher percentage of AVs using a HWT of 0.5 s. Arnaout and Arnaout [15] have simulated a multi-lane highway with a mix of cooperative cruise control (CACC) vehicles and manually driven ones. At low magnitudes of the vehicle flow, which reflect moderate traffic conditions, there was not found any significant statistical difference between cases with varying amounts of CACC vehicles. In contrast, in heavy traffic conditions an increase in CACC vehicles was found to increase the traffic flow significantly. However, for CACC penetration rates of less than 40%, the effect was minimal.
Bailey [4] has simulated AVs with a reaction time of 0.1 s in Aimsun. The scope was one road with a crossing using different traffic light parameters. Here, an increasing number of AVs leads to a higher traffic flow and shorter travel times. Vanderwerf et al. [16] have used an own car-following model to study the impact of ACC- and CACC-equipped vehicles on freeway operations. They have concluded that at 100% penetration, ACCs increased highway capacity and CACCs-equipped increased it even further. Kesting et al. [17] have used the Intelligent Driver Model (IDM) by Treiber et al. [18] to examine a 13 km long three-lane freeway section. The parameters used are a safe time of 1.6 s (instead of 1.5 s) and higher accelaration values. Already with 25% AVs, traffic jams were non-existent anymore when using AVs with low time-gaps, which was found to be the most important factor. Shladover et al. [19] have used ACC parameters from Nissan and CACC and manual vehicle parameters from Chinese literature. For the HWT they used 31.1% of all vehicles with 2.2 s, 18.5% with 1.6 s and 50.4% with 1.1 s for ACCs; and 12% with 1.1 s, 7% with 0.9 s, 24% with 0.7 s and 57% with 0.6 s for CACCs. Here, ACCs did not have any impact on the road capacity as the headway times were similar to human drivers. In contrast, the road capacity increased steadily with an increasing number of CACCs.
Studies showing a reduced traffic flow, mainly due to larger headway times
Fountoulakis et al. [20] have used Aimsun with the modified Gipps driving model [21, 22] to study mixed traffic under congested as well as free-flow conditions. They have simulated a 10 km long 3-lane strip and the reaction time of all vehicles was set to 1 s. Here, the ACCs lead to more congestion. Van Arems et al. [23] have used a HWT of 1.5 s which resulted in a reduced traffic flow when the percentage of ACCs exceeded 40%. Also, Bierstedt et al. [24] have concluded that cautiously programmed AVs with conservative headways could reduce flows, densities and capacities on highways.
Publications showing an increased traffic flow or capacity in urban traffic due to lower HWTs
Bailey [4] has simulated the city of Lausanne, where more AVs with a reaction time of 0.1 s lead to a higher traffic flow (reaction time of 0.1 s). Yeola et al. [5] used Vissim to simulate the impact of CAVs in the Urban area of Singapore. The used key performance indicators (KPIs) were travel time, average speed and the queue lengths at junctions. The latter ones are expected to be decreased by 47% with respect to their future base scenario of the year 2030 (0% CAVs). Similarly, the average delay at the junctions is likely to decrease by 30%, resulting in an increasing average speed of the CAVs by 36%. Likewise, the link flow capacities on the Singapore expressways are expected to increase from 2,500 up to 3600 vehicles per hour with 100% CAVs. However, as the paper was just submitted, the used parameters are not known to us yet.
Mavromatis et al. [6] simulated the road networks of Manhattan, Paris, Berlin, Rome and London. Here, AVs with a headway time of 0.5 s (instead of 1.69 for human driven vehicles) and CAVs with a HWT of 0.1 s had a positive effect on traffic flow. However, solely randomly inserted vehicles were used instead of calibrated OD matrices.
Literature on platooning in urban traffic
The reduced headway or reaction time is often used to form platoons of CAVs. With a lower distance between the vehicles, they can cross traffic intersections (the bottlenecks in urban traffic) at a higher rate [34]. Thus, with platooning, urban traffic might be optimized as well. This has been shown by Lioris et al. [35] who simulated a road network with 16 intersections and 73 links. Here, the throughput doubled when forming CAV platoons.
The parameters headway and reaction time
In the studies shown above, mainly the HWT and the reaction time have been used to define the behaviour of AVs. A longer HWT as well as a longer reaction time both correspond to a larger distance to the vehicle in front and it can be easily shown that in a simple breaking model with a constant deceleration, equal headway and reaction times lead to exactly the same results, although differently defined. However, they are not always comparable as they are differently used in different car following models.
A huge range of headway times has been used throughout the literature:
-
0.5 s [14]
-
1.1 s [8], where human drivers use the same value, but with a higher variance, and
-
1.5 s [23].
Other papers study a range of values here:
-
Papamichail et al. [10]: 0.8–2 s (instead of 1.1 s for human drivers).
-
Hartmann et al. [9]: 0.5, 0.9 and 1.8 s (instead of 1.1 s for human driven vehicles (HVs)).
-
Ntousakis et al. [11]: less than 1.1 and more than 1.5 s.
-
Stogios [7]: 0.5–2.1 s.
-
Van Arem et al. [26]: 0.5 s when following another CACC equipped vehicle and 1.4 s when following a non-CACC equipped vehicle.
-
Gouy et al. [27]: 0.3 s and 1.4 s.
-
Kesting et al. [28]: 0.9 – 2.5 s.
-
Mavromatis et al. [6]: 0.5 s for AVs and 0.1 s for CAVs.
In contrast, Shladover et al. [19] used a distribution of parameters: 31.1% of all vehicles with 2.2 s, 18.5% with 1.6 s and 50.
Studies using the reaction time instead of the HWT have been conducted by
Both use the Gipps driving model.
Further parameters defining the behaviour of AVs
Aria et al. [13] have used the speed limit ±2 km/h as target speed. AVs change lanes at crossings and turns earlier than human drivers. CAVs were cooperating with each other when changing lanes. Krause et al. [8] have defined AVs to move faster back to the right driving lane. When changing lanes, AVs were defined to accept less delays for the following vehicle and smaller gaps between the cars on the target lane. And for CAVs, smaller gaps to other CAVs were allowed. Krause et al. [29] have defined AVs to keep a higher standstill distance (2.0 instead of 1.5 m; the distance the vehicles keep to front vehicle when stopping at crossings), have added more safety time (reacting 10 s instead of 8 s before reaching the safety distance), did not vary the distance to the vehicle in front, have used the same accelerations as human driven vehicles, but monitored one vehicle in front (instead of two). Furthermore, their acceleration when changing lanes was equal to HVs, except the vehicle was not able to break fast enough; also, they have used a higher minimum distance when changing lanes (1 m instead of 0.5), and kept a constant velocity when driving idle (HVs with varying speed). Motamedidehkordi et al. [14] have used a standstill distance of 1 m.
Stogios [7] has varied the standstill distance, the threshold for entering ‘Following’ (controls the start of the deceleration process when a driver identifies/senses a preceding slower vehicle), the negative and positive ‘Following’ thresholds (control the speed differences during the following state: smaller values lead to a more sensitive reaction to accelerations or decelerations of preceding vehicles), the oscillation acceleration (the fluctuations in acceleration during the acceleration process), the standstill acceleration (the desired acceleration when starting from standstill), the acceleration at 80 km/h, the min. headway (front/rear) and the safety distance reduction factor (this factor reduces the safety distance during a lane change). Calvert et al. [36] have used the desired gap of the vehicle to distinguish between human driven vehicles, AVs and CAVs. The values were statistically distributed.
Literature on KPIs
Throughout the literature, several KPIs, mainly depending on the methodology and the research design, have been used to study the impact on traffic. The most important KPIs are the
Other study designs used more specific KPIs, e.g.
4 Methodological Approach
A road network model of Munich including the „outer ring “-highway is used with calibrated origin-demand matrices, all implemented in Aimsun. As a warm-up, the network is filled with vehicles from 5.30 to 7 am and the simulation is then run from 7 to 10 am Fig. 1.

The scope of the road network and its main OD entry and exit points
For the evaluation of the total traffic, the whole time window of three hours is used. Additionally, 150 tracked vehicles are placed into the simulation at 7 am and another 150 at 8 am. Of these, respectively 30 are driving inside the inner city, 30 around the middle part of the city, 30 into the city, 30 out of the city and 30 along the „outer ring “ (a highway surrounding Munich). Each of the 30 vehicles is split into 10 human driven cars, 10 AVs and 10 trucks. Each simulation is run with 10 replications and the base scenario (no AVs) with 30 replications for statistical significance. 10 of these routes are exemplary shown in the Figure.
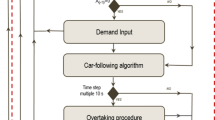
However, today it is still unclear how the AVs driving algorithms will be designed in detail as only few AVs are available on the market and driving details are not public. To give the users a safe feeling, it is likely that they will simulate the behaviour of human drivers. For this, we use the modified version of the Gipps driver model (1981, 1986), which is implemented in Aimsun.
The general rule for changing parameters is that they are usually distributed for human drivers, while for AVs they are set to fixed values.
-
The headway time is the most often discussed parameter in the literature. In the Gipps model it is represented by the reaction time following. Furthermore, it determines the minimum of the reaction time at stop and the reaction time front vehicle (reaction to green traffic lights). For human drivers they are set to 0.8, 1.2 and 1.6 s, respectively. For AVs, several values have been discussed in the literature, ranging from 0.1 to 2.2 s. Here, we use a value of 1.2 as this results in a headway to the front vehicle that equals German driving laws (distance in meters = half value of the tachometer in km/h) in the Gipps model. For CAVs, it’s also likely that these will keep a distance according to traditional laws to ensure safety. However, it might also be possible that they will be able to reduce their distance to the front vehicle significantly due to the inter-vehicle communication, so their parameter is set to 0.1. Thus, they will differ here from AVs. However, this value can only be applied if all cars are CAVs.
The following parameters are applied to AVs and CAVs likewise:
-
Aggressiveness level: this parameter determines if the vehicle accepts small gaps between vehicles when changing lanes (0 for normal gaps, 1 for smaller gaps). For human drivers it is distributed between 0 and 1, for AVs it’s set to 0, as AVs will likely drive safely [11].
-
Margin for Overtaking Manoeuvre: this adds an additional safety factor when estimating if an overtaking manoeuvre can be finished in time due to oncoming traffic. Human drivers: 3–7, for AVs it’s set to 7 to give the users a safe feeling [11].
-
Distance zone factor: this determines if lanes are changed in advance when lining up at red traffic lights. For human drivers it’s distributed 0.8–1.2, for AVs it’s set to 1.
-
Speed acceptance: this determines if the vehicle accepts the speed limit. For human drivers it’s centred around 1.1, i.e. human drivers usually drive faster than allowed. For AVs it’s set to 1.
-
Clearance: this determines the distance to the front vehicle when stopping, e.g. at traffic lights. For human drivers: 0.5–1.5, for AVs: 1.
-
Maximum give way time: if a vehicle waits longer than this time at an intersection, it accepts shorter gaps for crossing. Human drivers 4–14 s, AVs 14 s to give the user a safe feeling [11].
Other vehicle parameters like the length of the vehicle or its maximum acceleration and deceleration are left unchanged, as it is still unclear if AVs will be designed differently from traditional cars. Also, further parameters where AVs are unlikely to differ from human driven vehicles are left unchanged.
Furthermore, the future of urban traffic was studied, using the scenario described by Kaltenhäuser et al. [1]. They predicted the total vehicle miles travelled (VMT) in Germany to increase from 100% in 2015 to a maximum of approx. 123% in 2036. Afterwards, the total vehicle miles are expected to decrease slightly. In 2036, about 55% of the VMTs are driven by HVs and the remaining 45% by AVs, while trucks remain unchanged. Here, the main KPIs are studied again: the mean queue (representing the delay times), the density, the total travel time and the harmonic speed.
Beyond the parameters used here, the main features of CAVs are the communication with each other and with infrastructure. The first one is applied here indirectly with the usage of short reaction times which can only be realised with communication. The latter one is beyond this study as the communication can be simulated solely with single intersections and not yet for a whole city so far. For this topic, see e.g. [37, 38].
5 Results
First, the impact of the driving parameters on the total traffic was studied, using the KPIs described above. The results are summarized in Table 2.
Here, it can be seen that both the driving aggressiveness and the margin for overtaking manoeuvre have only a low and not significant impact on the KPIs. In contrast, the distance zone factor, speed acceptance, clearance and maximum give way time all have a negative impact on urban traffic flow. When modifying the reaction times, it must be generally distinguished between AVs and CAVs. Using a reaction time of 1.2 s, associated with AVs, the traffic flow is decreased significantly, whereas using quick reaction times of 0.1 s, associated with CAVs, the traffic flow gets enhanced. Thus, these parameters have a similar effect on urban traffic as it is studied here and intercity traffic as it is studied in the literature.
Then, the impact of autonomous vehicles on urban traffic was studied, using the parameters described above.
Total traffic
The impact of an increasing percentage of AVs on urban traffic is shown in Fig. 2.

Relative KPI change with an increasing percentage of AVs
It can be seen that all KPIs (except the harmonic speed) are steadily increasing with an increasing percentage of AVs. Here, especially the waiting times (queue, stop time, delay) are increasing significantly by 72, 60 and 54%, respectively, while the density and travel time are increasing by just 36% and 12%, respectively. This corresponds to a decreasing harmonic speed (−22%).
Traffic in specified travel directions
Here, 300 additional vehicles were placed in the simulation as described above. Of these, 20 HVs, 20 AVs and 20 trucks travelled around the inner city, and the same amount respectively around the middle part of the city, along the highway surrounding Munich, into the city and out of the city. Their travel behaviour was studied depending on the percentage of AVs. First, Fig. 3 shows that the relative travel time increases almost linearly and similarly for all types of vehicles with an increasing percentage of AVs (exemplary shown for the traffic in the inner city, but equally for the other travel directions). For 100% AVs, it increases by around 20%.

Impact of an increasing AV percentage on the travel time of HVs, AVs and trucks around the inner city
Thus, the relative travel time is averaged for the three types of vehicles and shown in Fig. 4 for the five specified travel directions.

Impact of an increasing AV percentage on the travel time along specified routes. As the travel time of HVs, AVs and trucks increases similarly (see Fig. 3), the relative travel time is shown as an average of these vehicles
It can be seen that the travel time increases also almost linearly for all directions, except the traffic around the middle city. Here, the travel time decreases first, before the linear increase starts at an AV percentage of 40%. Furthermore, the time increase in the main travel directions (such as into the city a along the outer ring in the morning) is with 28 and 47% significantly larger than the increase in the sparsely travelled directions (out of the city and around the middle city) with 6 and 15%.
These results reflect the fact that all AV driving parameters have a negative impact on urban road traffic, as shown in Table 2. Combining all effects together must then necessarily have an increased negative impact on urban road traffic. In return, human drivers “optimizeˮ the traffic flow by not following regulations and recommendations.
The impact of connected autonomous vehicles
In contrast to AVs, CAVs were designed with very short reaction times of 0.1 s. First, their impact on the total traffic was studied by comparing the penetration rates of 0 and 100%. Table 3 shows the relative changes.
The table shows that especially the waiting times (mean queue, stop and delay) get significantly reduced by about 70%. Also, the vehicle density and the travel time get reduced by 42 and 28%, respectively. This corresponds to an increased harmonic speed (+62%). Thus, the reduced reaction times (increasing the flow) have a much higher impact than the other driving parameters (decreasing the flow). This is in accordance with Table 2 where the impact of the single parameters is shown and the reaction times have a far higher impact.
Also, the directional traffic was studied using the 300 additional HVs, CAVs and trucks. The relative change in the travel time between 0 and 100% CAVs is shown in Table 4.
It can be seen that most travel times are being reduced around 21–32%. Here, especially the less travelled direction out of the city (in the morning) shows a lower reduction, while the reduction along the outer ring with high velocities shows a relatively large reduction of about 52%. These results reflect the fact that the reaction time dominates all other studied AV driving parameters, as shown in Table 2. The traffic might be further optimized with CAVs communicating with infrastructure like traffic lights.
Predicted future traffic with AVs
Furthermore, the simulation was run for the scenarios described by Kaltenhäuser et al. [1]. Their predicted AV and HV miles travelled and the resulting KPIs are shown in Fig. 5.

Predicted vehicle miles travelled by HVs and AVs and the resulting KPIs mean queue, density, total travel time and harmonic speed. For a better clarity, the stop and delay time are not shown
It can be seen that the mean queue, the traffic density and the total travel time will increase significantly in the future. The total travel time, which might be regarded as the most important variable, increases to a maximum of about 124% (compared to 2015) in 2036 and will slightly decrease afterwards due to a declining population. The increased travel time corresponds to a lower speed, which is being reduced by approx. 39%.
However, due to the increased usage of autonomous driving vehicles, the extended travel time might be used for activities like reading, working or sleeping, which could compensate it at least in parts.
6 Conclusions
In previous studies, the impact of autonomous driving vehicles and their driving parameters on urban road traffic were examined. However, these studies focussed mainly on single and double lane traffic as it is found e. g. on highways, while the impact on urban road traffic is still unclear.
For this, a traffic simulation using a calibrated city model of Munich was run with several features of AVs. With this, the AV driving parameters influencing urban road traffic were examined. Here, especially the reaction times had an impact, where larger values used for AVs had a negative impact on traffic flow, while shorter values used for CAVs had a positive effect. This is in accordance with the literature, although the results are barely comparable as mainly single and double lane traffic was used, while in our study a complete city network was used and results could have been different for example due to vehicle behaviour at crossings or traffic lights. In our study, the impact is highest when traveling along the main travel directions (into the city in the morning) and it is higher for highways than for (slow) urban traffic.
A similar result was produced when the impact of AVs and CAVs, simulated with their respective driving parameters, was simulated. Here, AVs, associated with longer headway times lead to reduced traffic flow while CAVs, associated with shorter headway times, lead to an increased traffic flow. Thus, it could be seen that the headway times dominated the other features associated with autonomous driving that were identical for both types of vehicles.
Hence, it is important to reduce the reaction and headway times of AVs and CAVs to reduce travel times, traffic and thus emissions. This will not just be a technically difficult task, but also a policy issue, as road safety must be ensured at all times. This topic will gain in importance when looking at future scenarios that predict an increased traffic.
As the effects are higher in the main travel directions, an intelligent and collaborative routing of AVs could as well to reduce traffic.
References
Kaltenhäuser B, Werdich K, Dandl F, Bogenberger K (2020) Market development of autonomous driving in Germany. Transp Res Part A: Policy Pract 132:882–910
Bansal P, Kockelman KM (2017) Forecasting Americans long-term adoption of connected and autonomous vehicle technologies. Transp Res Part A: Policy Pract 95: 49–63. https://doi.org/10.1016/j.tra.2016.10.013
Nieuwenhuijsen J, de Almeida Correia GH, Dimitris M, van Arem B, van Daalen E (2018) Towards a quantitative method to analyze the long-term innovation diffusion of automated vehicles technology using system dynamics. Transp Res Part C: Emerg Technol 86:300–327. https://doi.org/10.1016/j.trc.2017.11.016
Bailey NK (2016) Simulation and queueing network model formulation of mixed automated and non-automated traffic in urban settings. Master thesis, Massachusetts Institute of Technology
Yeola P, Margreiter M, Abeyweera B (2020) Impact of connected and autonomous vehicles (CAVs) on the urban road network performance of Singapore CBD. Submitted to MobilTUM 2020. Singapore
Mavromatis I, Tassi A, Piechocki RJ, Sooriyabandara M (2020) On urban traffic flow benefits of connected and automated vehicles. arXiv preprint arXiv:2004.00706
Stogios C (2018) Investigating the effects of automated vehicle driving operations on road emissions and traffic performance. Master Thesis, University of Toronto
Krause S, Motamedidehkordi N, Hoffmann S, Busch F (2017a) Mikroskopische Simulation von automatisierten Fahrzeugen zur Ermittlung der Wirkungen auf die Kapazität von Autobahnen. Straßenverkehrstechnik: 831–838
Hartmann M, Motamedidehkordi N, Krause S, Hoffmann S, Vortisch P, Busch F (2017) Impact of automated vehicles on capacity of the German freeway network. ITS World Congress
Papamichail I, Bekiaris-Liberis N, Delis AI, Manolis D, Mountakis KS, Nikolos IK, Roncoli C, Papageorgiou M (2019) Motorway traffic flow modelling, estimation and control with vehicle automation and communication systems. Annu Rev Control 48:325–346
Ntousakis IA, Nikolos IK, Papageorgiou M (2015) On microscopic modelling of adaptive cruise control systems. Transp Res Procedia 6:111–127
Wang J, Rajamani R (2002) Adaptive cruise control system design and its impact on highway traffic flow. IEEE.In: Proceedings of the 2002 American Control Conference, vol 5. pp 3690–3695
Aria E, Olstam J, Schwietering C (2016) Investigation of automated vehicle effects on driver’s behavior and traffic performance. Transp Res Procedia 15:761–770
Motamedidehkordi N, Margreiter M, Benz T (2016). Effects of connected highly automated vehicles on the propagation of congested patterns on freeways. In: 95th Annual Meeting of the Transportation Research Board
Arnaout GM, Arnaout J-P (2014) Exploring the effects of cooperative adaptive cruise control on highway traffic flow using microscopic traffic simulation. Transp Plan Technol 37(2):186–199
Vanderwerf J, Shladover S, Kourjanskaia N, Miller M, Krishnan H (2001) Modeling effects of driver control assistance systems on traffic. Transp Res Rec: J Transp Res Board 1748:167–174. https://doi.org/10.3141/1748-21
Kesting A, Treiber M, Schönhof M, Helbing D (2008) Adaptive cruise control design for active congestion avoidance. Transp Res Part C: Emerg Technol 16(6):668–683
Treiber M, Hennecke A, Helbing D (2000) Congested traffic states in empirical observations and microscopic simulations. Phys Rev E 62(2):1805
Shladover SE, Su D, Lu XY (2012) Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp Res Rec 2324(1):63–70
Fountoulakis M, Bekiaris-Liberis N, Roncoli C, Papamichail I, Papageorgiou M (2017) Highway traffic state estimation with mixed connected and conventional vehicles: Microscopic simulation-based testing. Transp Res Part C: Emerg Technol 78:13–33
Gipps PG (1981) A behavioural car-following model for computer simulation. Transp Res Part B: Methodol 15(2):105–111
Gipps PG (1986) A model for the structure of lane-changing decisions. Transp Res Part B: Methodol 20(5):403–414
van Arem B, Hogema J, Smulders S (1996) The impact of autonomous intelligent cruise control on traffic flow. In: Proceedings of the 3rd world congress on intelligent transport systems. Orlando
Bierstedt J, Gooze A, Gray C, Peterman J, Raykin L, Walters J (2014) Effects of next-generation vehicles on travel demand and highway capacity. FP Think Working Group 8:10–11
Laquai F, Duschl M, Rigoll G (2011) Impact and modeling of driver behavior due to cooperative assistance systems. International Conference on Digital Human Modeling, Springer, 6777:473–482
van Arem B, van Driel CJ, Visser R (2006) The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans Intell Transp Syst 7(4):429–436
Gouy M, Wiedemann K, Stevens A, Brunett G, Reed N (2014) Driving next to 1 automated vehicle platoons: How do short time headways influence non-platoon 2 drivers’ longitudinal control? Transp Res Part F 27:264–273
Kesting A, Treiber M, Schönhof M, Helbing D (2007) Extending adaptive cruise control to adaptive driving strategies. Transp. Res. Rec.: J. Transp. Res. Board 2000(1):16–24
Krause S, Motamedidehkordi N, Hoffmann S, Busch F, Hartmann M, Vortisch P (2017b) Auswirkungen des teil-und hochautomatisierten Fahrens auf die Kapazitaet der Fernstrasseninfrastruktur. FAT-Schriftenreihe 296
Elmorshedy L, Mostafa TS, Taha I, Abdulhai B. Quantifying the impact of driving automation on Ontario’s freeways. University of Toronto. https://uttri.utoronto.ca/files/2019/07/3-Elmorshedy-et-al_Quantifying-the-imapcts-of-driving-automation-on-ontario-freways_June-2019.pdf. Accessed 20 June 2020
Delis AI, Nikolos IK, Papageorgiou M (2015) Macroscopic traffic flow modeling with adaptive cruise control: Development and numerical solution. Comput Math Appl 70(8):1921–1947
Roncoli C, Papamichail I, Papageorgiou M (2014) Model predictive control for multi-lane motorways in presence of VACS. In: 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). pp 501–507
Mahmassani HS (2016) Autonomous vehicles and connected vehicle systems: Flow and operations considerations. Transp Sci 50(4):1140–1162. https://doi.org/10.1287/trsc.2016.0712
Calvert S, Mahmassani H, Meier JN, Varaiya P, Hamdar S, Chen D, Li X, Talebpour A, Mattingly SP (2018) Traffic flow of connected and automated vehicles: Challenges and opportunities. Road Veh Autom 4: 235–245. Springer
Lioris J, Pedarsani R, Tascikaraoglu FY, Varaiya P (2017) Platoons of connected vehicles can double throughput in urban roads. Transp Res Part C: Emerg Technol 77:292–305
Calvert SC, Schakel WJ, Van Lint JWC (2017) Will automated vehicles negatively impact traffic flow? J Adv Transp
Guo Q, Li L, Ban XJ (2019) Urban traffic signal control with connected and automated vehicles: A survey. Transp Res Part C: Emerg Technol 101:313–334
Yang K, Guler SI, Menendez M (2016) Isolated intersection control for various levels of vehicle technology: Conventional, connected, and automated vehicles. Transp Res Part C: Emerg Technol 72:109–129
Author information
Authors and Affiliations
Contributions
The authors confirm contribution to the paper as follows: study conception and design: B. Kaltenhäuser, K. Bogenberger; data collection: B. Kaltenhäuser; analysis and interpretation of results: B. Kaltenhäuser; draft manuscript preparation: B. Kaltenhäuser, S. Hamzehi, K. Bogenberger. All authors reviewed the results and approved the final version of the manuscript.
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kaltenhäuser, B., Hamzehi, S., Bogenberger, K. (2023). The Impact of Autonomous Vehicles and Their Driving Parameters on Urban Road Traffic. In: Antoniou, C., Busch, F., Rau, A., Hariharan, M. (eds) Proceedings of the 12th International Scientific Conference on Mobility and Transport. Lecture Notes in Mobility. Springer, Singapore. https://doi.org/10.1007/978-981-19-8361-0_2
Download citation
DOI: https://doi.org/10.1007/978-981-19-8361-0_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-8360-3
Online ISBN: 978-981-19-8361-0
eBook Packages: EngineeringEngineering (R0)