
Abstract
This paper describes a solar-powered electric vehicle (EV) charging station that works with a battery energy storage system and a single phase grid. This article focuses primarily on EV charging stations located in parking lots on college campuses, schools, or workplaces. As PV power is not constant, a battery energy storage system is used as a backup. If the PV produces more power than the vehicle load demands, the excess power is stored in the BESS, and when the PV power drops below a certain threshold, the stored energy in the battery is used as a backup source. If a single-phase grid is connected to the system, excess power can be sent to the grid and considered a source of money. Alternatively, if PV power is low and the battery has a low charge capacity, grid power can be used to charge the vehicles. This work discusses the mutual sharing of power between these sources in various cases. In all the operating conditions, the THD of grid current founds to be within the IEEE standard limit. A Modified Incremental Conductance MPPT technique is used to extract the maximum PV power. The system is designed to charge three vehicles simultaneously in a multi-port dc-link and is simulated using Matlab under three different conditions. The performance of the charging system is validated with simulation results.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Constant current constant voltage charging (CCCV)
- Electric vehicle charging station
- Energy storage system (ESS)
- Photo voltaic (PV)
1 Introduction
In the current scenario, electric vehicles are the best mode of transportation because fuel prices are rising and petroleum products are becoming scarce. Although electric vehicles are not widely used today, studies show that by the end of 2025, the transportation system will be entirely comprised of electric vehicles. The Indian government has set objectives to accelerate the adoption of electric vehicles (EVs). Electric vehicles have an advantage over conventional vehicles because they emit less pollution. After all, no fuel is used. The engine of EV operates on a closed circuit, so EVs do not emit any of the gases causing global warming. And by comparing the maintenance, the combustion engine has many parts which can cause damages whereas an electric vehicle has less than 20 parts. This means EVs are likely to have lower long-term maintenance costs than other vehicles. As the demand for EVs increases the population of electric vehicle charging stations are also increases. Charging stations at every point of cities are needed for the effective use of electric vehicles. Renewable energy sources (RES) can be used for an EV charging station as it has no emission content compared to conventional energy generation. The environment has an impact on renewable energy output. An energy storage system is required to ensure system stability and efficient management of renewable energy [1, 2]. An Energy Storage System consists of a battery that stores energy and a bidirectional DC–DC converter that transfers energy in both directions between the battery and the renewable energy source. Energy storage with batteries is best suited for renewable energy sources such as solar, wind, and so on [3, 4]. A charging station powered by Renewable Energy Sources (RES) is more appealing than conventional energy generation because RES are free, pollution-free, and emit less. Since petroleum fuels are depleting and prices are rising, RES power charging stations on college campuses, school offices, and workplaces are an appealing concept. Because it primarily focuses on charging EVs during school, college, or workplace hours, this charging configuration has the advantage of not requiring any quick charging or rushes [5, 6]. Customers can thus plug in their vehicles in the parking lot, go about their business, and unplug whenever they want. People are more likely to choose electric vehicles if convenient charging stations are installed in parking lots. If this system is linked to the utility grid, it will be possible to provide continuous charging even if PV and energy storage are insufficient. In low-load demand situations, extra power can be sent into the utility grid and considered an economic advantage.
As a result, in this paper, a single-phase grid-connected, PV-powered electric vehicle charging station with an energy storage system is implemented to charge vehicles on a college campus during working hours. The system has several advantages, including the following: (1) The PV array is controlled by a modified INC algorithm to extract the maximum power. (2) Depending on the energy requirements of the loads, the bidirectional converter operates in buck and boost modes to charge and discharge the station battery. (3) The dc-link voltage is maintained constant under all operating conditions. (4) The total harmonic distortion of grid current sending and receiving from the grid is always less than 5% under all operating conditions.
2 System Configuration
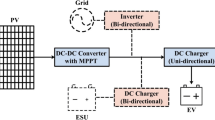
The overall system has a solar array with a boost DC–DC converter, Energy storage system battery with a bidirectional converter, buck converters as charging circuits of EV battery, and a single-phase grid integrated to it using a bidirectional AC/DC converter as shown in the Fig. 1. Ev batteries are charged from the DC bus is controlled by a constant current constant voltage control depend on the state of charge of the EV battery. The bidirectional converter was employed for charging and discharging the BESS is controlled by a PI controller, which determines whether to operates in buck or boost mode for the power flow in both directions. For power flow from grid to system and system to the grid, a DQ frame current control is employed in grid side AC/DC converters.

Schematic diagram of the system
2.1 Solar Array and Storage Battery
-
(i)
The solar array is designed to charge three EV batteries, the EV batteries considered are lithium–ion batteries with 240 V, 40 Ah capacity.
The following is the mathematical relationship used for designing solar arrays and storage batteries. Power required by three EV’s to charge for 8 h is calculated using Eqs. 1 and 2 and found that a minimum of 3.6 kW power is required to charge three vehicles.
$$\begin{aligned} E_{\text {EV}} = \text {Battery Voltage} \times \text {Capacity}\times 3 \end{aligned}$$(1)$$\begin{aligned} P_{\text {EV}} = \frac{E_{\text {EV}}}{8} \end{aligned}$$(2)So considering extra charges to charge BESS and to supply grids PV panel with 6 kW chosen. PV model of 1 soltech 1STH-250-WH array with one array power of 250 W is selected with Number of Parallel Strings as 2 and number of Series Connected modules per string as 8 to get selected PV output power.
-
(ii)
The storage battery is designed on the consideration that a maximum of 2 h battery has to power the loads considering PV fail conditions. The Depth of Discharge (DoD) of battery is assumed as 50%, its efficiency as 80%, and the converter efficiency as 90%, Energy supplied by the battery is given as
$$\begin{aligned} E_{\text {bat}} = \frac{P_{\text {EV}} \times 2}{0.9 \times 0.9 \times 0.8} \end{aligned}$$(3)Considering a 240 V battery, then the battery’s Ah rating is calculated using Eq. 4.
$$\begin{aligned} \text {Battery Ah} = \frac{E_{\text {bat}} }{240 \times \text {DoD}} \end{aligned}$$(4)hence 240 V, 100 Ah lithium–ion battery is chosen as station battery in this system.
3 Control Configuration of PV Fed EVCS
This section discusses various controlling techniques used to control the operation of converters in this system. The MPPT method generates the boost converter duty ratio by employing a modified incremental conductance method. This work employs PID control for the bidirectional converter, constant current constant voltage charging control for the buck charging circuit, and D–Q frame current control for the grid-tied inverter.
3.1 Modified Incremental Conductance Method
The maximum solar power is tracked using a modified incremental conductance algorithm. This algorithm operates by calculating the change in output power over a fixed period and calculating duty ratios from this. The flow chart of Modified INC is depicted in Fig. 2. As an improvement from the incremental conductance algorithm here uses two-loop conditions for calculations [7]. In the case where solar irradiation increases, voltage, and current will increases, and the values \(\Delta V/\Delta P \) and \(\Delta I/\Delta P \) both become positive. So the algorithm will reduce the duty ratio. And when irradiation reduces the voltage and power falls, but the ratio between \(\Delta V/\Delta P \) is positive, so the command is to increasing the duty ratio, which is improper in this case. As a result, the second loop is used for the conditions of reducing irradiation. As a result, the second loop is used, and it uses the first loop to determine the duty ratio when radiation rises. In Modified INC the control can calculate maximum points more quickly, and duty produces are more precise.

Flow chart of modified INC MPPT
3.2 PI Controller for Bidirectional Converter
The bidirectional converter has two objectives: to operate in buck or boost mode depending on the charging and discharging of the storage battery, and to maintain a constant DC-link voltage. The converter can control the transition between operating quadrants to ensure that it is as smooth as possible. To create a control for both the boost and buck modes, the proportional-integral (PI) control was used. By sensing the dc-link voltage and battery current, the control made switching between operating modes easier.
3.3 CC–CV Control of Battery Charging
Constant current–constant voltage (CC–CV) charging is a hybrid of CC and CV charging. The charger limits the amount of current to a reference level until the battery reaches a predetermined SoC value. The charging current decreases as the battery is fully charged. This system, which is widely used in EV charging, enables fast charging while avoiding the risk of overcharging. The battery is charged at a constant current rate until it reaches the SoC level of 90%, at which point constant voltage charging is included [8]. The battery is normally charged at a constant current and if the battery reaches an SoC greater than 90%, it enters the CV mode of charging, where the change in duty keeps the battery voltage constant.
3.4 DQ Frame Current Control for Single Phase Grid
The single-phase inverter under consideration in this paper is made up of an IGBT-based H-bridge and an LCL output filter. DQ frame control is used to control grid-connected inverters in this case. The sensed grid voltage and current are transformed to the \(\alpha \text {--} \beta \) frame and then to the d–q frame. Current controller with PID uses the d–q frame values of current and voltages. This d–q quantity finally transformed to \(\alpha \text {--} \beta \) to generate the switching pulses of the inverter [9, 10].
3.5 Control Coordination Between Converters
The bidirectional converter and inverter are controlled based on the difference between PV power and total load power (including EV batteries and DC load). If the PV power exceeds the load power, the bidirectional converter’s buck side switch is activated. Inverters are given a positive reference current, so they provide excess power to the grid [11]. If the PV power is less than the load power, the storage battery’s SoC is examined. If the SoC is greater than 10%, the storage battery is allowed to discharge and provide power to the load. In this case, the bidirectional converter’s boost switch is activated. And if the SoC is less than 10%, the storage battery is not allowed to discharge, forcing the grid to provide power; at this point, a negative reference current with a larger magnitude is provided for inverter control. Because they are always on, the boost and buck converters have no mutual control relationship.
4 Results and Discussion
The system is designed for a maximum PV power of 6 kW; the PV array’s MPP voltage and current are 245 V and 24 A, respectively. A 240 V, 40 Ah lithium–ion battery is used as an EV battery, and a 240 V, 100 Ah battery is used as a storage battery. The system’s performance is validated in three different scenarios. (1) PV powering mode: where PV generates enough power to power the load and the rest is used to charge storage batteries and supply power to the grid. This condition is simulated by keeping the solar irradiation constant at 1000 W/m\(^2\). (2) Battery supporting mode: this mode displays the storage battery’s assistance in meeting load demand when PV power is low. The battery provides the required extra power by discharging stored energy. For simulation analysis, the irradiation is gradually reduced from 1000 to 300 W/m\(^2\) to demonstrate a low PV production value, and the results are analyzed. (3) Grid powering mode: when PV and storage batteries do not have enough power to supply the load, the grid feeds the loads by injecting the necessary power. For simulation purposes, the irradiation is reduced from 1000 to 10 W/m\(^2\), and the State of Charge of the station battery is set to a low value (9%). This section examines the results obtained from these three conditions. To demonstrate power balance, PV power (\(P_{\text {PV}}\)) is taken as positive, while rest powers such as vehicle power (\(P_{\text {EV}}\)), grid power (\(P_{\text {grid}}\)), storage system power (\(P_{\text {ESS}}\)), and load power (\(P_{\text {load}}\)) are taken as negative because they receive power.

PV waveforms at irradiation of 1000 W/m\(^2\)

Performances in PV powering mode. a Storage battery current and SoC. b Grid voltage and grid current, c DC-link voltage

Dynamic performance of system a DC-link voltage in battery supporting mode, b DC-link voltage in grid powering mode, c storage battery in battery supporting mode, d grid voltage and current in grid powering mode
The PV voltage, current, and power are shown in Fig. 3 at 1000 W/m\(^2\). As a result, maximum voltage and current are obtained as MPP values, and the designed power is obtained under this condition. Figure 4 depicts the performance of the storage battery and grid in PV powering mode. Because the PV power is surplus at this time, the station battery is charging, as evidenced by the negative charging current and increasing SOC curve. It is also injecting power into the grid because the grid current and voltage are out of phase. From Fig. 4c the dc-link voltage seems to be maintained at a constant voltage of 400 V. The battery supporting mode is simulated by changing the irradiation from 1000 to 300 W/m\(^2\), as shown in Fig. 5a, and the dc-link voltage remains constant at 400 V despite the irradiation change. Figure 5b shows that the charging current shifts from a negative to a positive value, and the soc curve appears to be decreasing as the point of irradiation changes. This demonstrates that the battery is injecting the necessary power for loads when PV power is low. Similarly, the irradiation is reduced from 1000 to 10 W/m\(^2\) to demonstrate the performance when using grid power. Figure 5c depicts the irradiation change and shows that, even after the irradiation change, the dc-link voltage remains constant at 400 V. The grid current increases from the point of irradiation change on wards, as shown in Fig. 5d. The initial grid current is out of phase with the voltage and is regarded as negative power; however, after the irradiation change, the grid current is in phase with the voltage, and the grid power is regarded as positive. This demonstrates that when PV power and storage battery capacity are low, the grid injects the necessary power for loads. The total harmonic distortion of grid current is shown in Fig. 6 in both scenarios, namely (a) when PV injects power into the grid and (b) when the grid injects current into the system. THD is extremely low in both cases, at less than 5%, well below the IEEE 519 standard limit.

THD analysis of grid current a when PV injecting current to grid and b when grid inject current to system

Power-sharing between source and loads in system a PV powering mode, b battery supporting mode, c grid powering mode
The power-sharing relationship between PV, Storage battery, Grid, and loads like EV battery and DC load is depicted in Fig. 7. PV power is the only positive power and the others are negative in Fig. 7a, suggesting that PV is the only active source and the others are loads. The system’s first mode of functioning is therefore confirmed.
The battery supporting mode is shown in Fig. 7b, when the PV power is low, the battery power changes from negative to positive, indicating that the battery supply power is active at that moment (positive power means power is supplying, while negative power shows power is accepting). As a result, battery support at the PV low output power stage is validated. Similarly, in Fig. 7c, which depicts power-sharing in grid powering mode, it is observed that when PV power is very low, grid power appears to change from negative to positive while battery power remains the same, indicating that the battery cannot discharge or support due to its low capacity. Power-sharing between PV sources, storage batteries, and the grid is validated in all three scenarios. In all cases, the EV battery power appears to be constant, indicating that vehicle charging is not disrupted in any way.
5 Conclusion
A grid-connected PV-fed electric vehicle charging station with an energy storage system is simulated in order to charge three electric vehicle batteries from the dc bus. The simulation is carried out for various transmission conditions of power between PV, ESS, and the grid. In all of the scenarios investigated, the overall power-sharing between sources and loads was satisfactory. When PV power is low, the energy storage system is seen to keep vehicle charged continuously. The utility grid is connected into the system allows bidirectional power transmission, and the grid has been shown to support the charging system even when the PV and ESS systems were not operating at full capacity. The fact that grid current has a very low THD value in all conditions makes the system more reliable. The operation of a bidirectional converter is found to be satisfactory because the charging and discharge of ESS occur at an appropriate time and also maintains a DC bus voltage.
References
Lee H-S, Yun J-J (2019) High-efficiency bidirectional buck-boost converter for photo voltaic and energy storage systems in a smart grid. IEEE Trans Power Electron 34:4316–4328
Savio DA, Juliet VA, Chokkalingam B, Padmanaban S, Holm-Nielsen JB, Blaabjerg F (2019) Photo voltaic integrated hybrid micro grid structured electric vehicle charging station and its energy management approach. Energies 12(1)
Elsayad N, Moradisizkoohi H, Mohammed OA (2019) Design and implementation of a new transformer less bidirectional dc-dc converter with wide conversion ratios. IEEE Trans Ind Electron 66:7067–7077
Singh B, Verma A, Chandra A, Al-Haddad K (2020) Implementation of solar pv-battery and diesel generator based electric vehicle charging station. IEEE Trans Ind Appl 56:4007–4016
Hasanpour S, Baghramian A, Mojallali H (2020) Analysis and modeling of a new coupled inductor buck boost dc-dc converter for renewable energy applications. IEEE Trans Power Electron 35:8088–8101
Biya TS, Sindhu MR (2019) Design and power management of solar powered electricvehicle charging station with energy storage system. In: 3rd International conference on electronics, communication and aerospace technology (ICECA), Coimbatore, India, pp 815–820
Adhikari N, Singh B, Vyas AL (2011) Performance evaluation of a low power solar-PV energy system with SEPIC converter. In: IEEE Ninth international conference on power electronics and drive systems, Singapore, pp 763–769
Preetha Yesheswini B, Jai Iswarya S, Amani B, Prakash PSMR (2020) Solar pv charging station for electric vehicles. In: International conference for emerging technology (INCET), Belgaum, India, pp 1–7
Arab N, Kedjar B, Al-Haddad K (2016) D-Q frame optimal control of single phase grid connected inverter with LCL filter. In: IEEE Electrical power and energy conference (EPEC), Ottawa, ON, Canada, pp 1–6
Tang Y, Burgos R, Li C, Boroyevich D (2017) Stability assessment of utility PV integration to the distributed systems based on D-Q frame impedances and GNC. In: IEEE 18th Workshop on control and modeling for power electronics (COMPEL), Stanford, CA, USA, pp 1–6
Ma C-T (2019) System planning of grid-connected electric vehicle charging stations and key technologies: a review. Energies 12(21)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sathyajith, V.P., Ismayil, C. (2023). Grid Connected PV Fed EV Charging Station for College Campus with an Energy Storage System. In: Namrata, K., Priyadarshi, N., Bansal, R.C., Kumar, J. (eds) Smart Energy and Advancement in Power Technologies. Lecture Notes in Electrical Engineering, vol 927. Springer, Singapore. https://doi.org/10.1007/978-981-19-4975-3_62
Download citation
DOI: https://doi.org/10.1007/978-981-19-4975-3_62
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-4974-6
Online ISBN: 978-981-19-4975-3
eBook Packages: EnergyEnergy (R0)