
Abstract
Distance relays are subjected to unintended tripping at the time of power swing. Power Swing Blocking (PSB) function installed with distance relays prevents unwanted tripping. However, if a fault occurs amidst power swing, it must be detected and cleared. In a line with series compensation, fault detection at the time of power swing is challenging. The available techniques fail to detect fault in a line with series compensation. In this paper, a cumulative sum of zero-sequence and negative-sequence current is used to detect fault amidst power swing in a line with series compensation. The cumulative sum of zero-sequence component and negative sequence component helps in determining nature of fault along with the fault detection. The proposed technique has been tested for different fault conditions and compared with available techniques.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Under steady-state conditions, the generated and consumed reactive and active power remains balanced. On the occurrence of system faults or due to line switching, generator disconnection, addition or removal of large loads causes a sudden change in electrical power. The mechanical input remains the same while the electrical power changes. Rotor angle oscillates among the generators, resulting in power swing. Severity of the disturbance decides whether the power swing is stable or unstable. Due to variation in three-phase power and oscillation of the rotor angle, the apparent impedance seen by a distance relay lies within the operational zone of the relay. It is misinterpreted by the relay as a fault, leading the relay to trip. A PSB is available in relays to prevent tripping of the relays amidst power swing [1]. The relay should identify the malfunction and operate rapidly to ensure stability.
With the recent development and growing population, to meet the growing electricity demand, the transmission line performance is being enhanced. For this, series compensation is being included in long transmission lines. For the lines with series compensation voltage drop, Ferranti effect and reactive impedance reduce. Due to compensation, fault detection in a line with series compensation becomes challenging. Frequency components of signal during fault depend on its location, level of compensation, type of fault, and MOV operation [2]. The apparent impedance oscillates, causing difficulty to differentiate between power swing and fault. The detection of fault amidst power swing in a line with series compensation finds limitations due to the use of series capacitors in transmission lines, resulting in voltage inversion, current inversion, subharmonic oscillations, and transients during the fault period. Several methods for detection amidst power swings have been proposed for regular transmission lines [3,4,5].
The conventional method [6,7,8,9,10,11,12] for fault detection in an uncompensated line includes measuring the rate of change of resistance at the relay location. Under steady-state conditions, the apparent resistance varies, while during the fault period it remains constant [13].
The magnitude and rate of change of Swing Center Voltage (SCV) is another technique. SCV is defined as the voltage at the location of two sources equivalent system where the voltage is zero and the angle between the sources is 180°. The SCV changes continuously under normal condition but remains fixed during fault [6].
A fault detector is also being used to detect high impedance ground fault amidst power swing using superimposed current components [11]. Prony method [11] based on the decaying dc in the current waveform is being employed in the fault detector for differentiating between power swing and fault. Even the voltage phase angles are employed for detecting faults amidst power swing.
Recent techniques involve Artificial Neural Network (ANN) [12] based adaptive systems and wavelet-based signal processing [14]. Wavelet transform creates a high-frequency signal at the inception of fault for detecting fault amidst power swing. The suitability of any detection technique depends on the location and fault condition in a line with series compensation.
Due to non-linear functioning of the series capacitor combination, the available techniques fail. The SCV magnitude and the rate of its change get affected as during fault period, current and voltage phase angle varies because of non-linear impedance across the MOV and series compensation [2, 15, 16]. The problem of voltage inversion in a line with series compensation makes it impossible for monitoring voltage phase angle at different locations making this method unsuitable. The superimposed current technique fails for high resistance and power angle tending to 180°. The fault current being low does not bypass the capacitor.
2 Challenges in Detection of Fault Amidst Power Swing for a Line with Series Compensation
In a line with series capacitor, MOV, and air gap poses protection problems depending upon the location and type of fault. Owing to its non-linear impedance, the conventional methods of fault detection find limitations in a line with series compensation.
Fault detection in a line with series compensation is difficult if a fault occurs at far ends. For faults occurring at far ends, or at a power angle close to 180°, the magnitude of fault current is low. This low current does not bypass the capacitor, resulting in sub-synchronous oscillations. These oscillations are a hindrance in the impedance estimation. Thus, making the fault detection during power swing a difficult task. For fault occurring closer to the relay, the fault current is large enough to bypass the capacitor.
The performance of the proposed technique has been demonstrated by a 400 kV, 50 Hz, 9 bus system. Three generators (600, 465, and 310 MVA) are connected between A and B buses [17]. Figure 1 [17] shows a test system that demonstrates the challenges with fault detection in a line with series compensation during power swing. Lines 1 and 2 are adjusted by 40%, and at the relay’s end, capacitors are installed. MOV is used for the protection of series compensated lines. During fault period in impedance variation, it is not practically possible to use conventional positive sequence distance relay. For protection of a line with series compensation, MOV is used [17]. The figure shown below is single-line diagram of overall system. Let δ be power angle difference between A and B bus voltages. R is the distance relay used for the test purpose which is present at bus A. Suppose at 0.6 s. a 3-phase fault is created in line 2 which is then cleared after 0.1 s by the action of circuit breakers R3 and R4. Hence, power swing arises in the circuit. Since, it is a series of compensated lines, during power swing it is very hard to remove faults from the far endpoints. Suppose at 200 km far from the line a three-phase fault at 2.6 s is created, the corresponding Fig. 2 shows required current and voltage waveforms of the circuit at the instance.

The test system

Voltage and current waveforms when a fault is created at 2.6 s 200 km from the line. (all values in p.u.)
The main challenge in a line with series compensation is detecting far-end faults at the time of power swing. A three-phase symmetrical fault is created at a distance of 200 km from the relay location at 2.6 s and resulting waveforms of current and voltage are shown in Fig. 2. The figure shows how current and voltage are modulated with the swing frequency amidst power swing. Consequently, the fault identification cannot be done using sample-to-sample or cycle-to-cycle comparisons [18]. Current is lower than swing current under fault conditions. This does not bypass the capacitor resulting in sub-synchronous oscillation. These issues make the detection even more complex.
3 Proposed Technique
Although the power swing phenomenon is balanced in nature, it is noticed that a tiny percentage of sequence components occur in the swing current due to signal modulation and phasor computing algorithms. During pre-fault conditions, only positive sequence components exist as a major percentage of the voltage and current phasors, but in case of faults, (especially unbalanced faults), negative sequence components have significant contribution in the fault currents. Hence, the presence of negative sequence components signifies unbalance or faults in the system.
As per [17], there are many challenges associated with fault detection in a line with series compensation. The amplitude of the fault current for a far-bus defect is less than the swing current, it is difficult to identify this failure amidst power swing.
The current and voltage data for a relay site are saved, and the voltage and current phasors for each phase are approximated using the Discrete Fourier Transform (DFT) hence, the fundamental components are obtained. The Fortescue Theorem is then used to obtain the sequence components of the phase currents. The Cumulative Sum (CUSUM) technique is used to discover faults utilizing the sequence component gathered thus far. Using this technique, the CUSUM of both negative and zero-sequence components is produced, and the indices for both negative and zero sequences are then combined in an “OR” operation to generate the final trip signal.
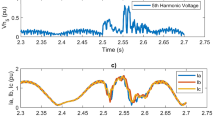
An ag-fault and a three-phase fault at 2.6 s (with a slip frequency of 4.3 Hz) are made at the far end of the bus of the system depicted in Fig. 1 to investigate the fluctuation in \(\left| {\overline{I}_{2} } \right|\) and \(\left| {\overline{I}_{0} } \right|\) during swing and fault, and the results are presented in Figs. 3 and 4. For close-in faults, the fault current exceeds the swing current and MOV operates to bypass the series capacitor. The fault current in an ag-fault is reported to have a considerable magnitude of negative and zero-sequence components, and it oscillates due to components of modulating frequency in fault signals. In three-phase faults, due to initial transients, \(\left| {\overline{I}_{2} } \right|\) and \(\left| {\overline{I}_{0} } \right|\), vary vigorously at the point of occurrence of fault, but they have very small value because of the modulation of signal by the swing. Also, for ag-fault, the MOV operates only for a-phase, as a-phase current becomes higher than swing current, but for three-phase fault, MOV of all the three phases conducts and bypasses the series capacitor if fault current exceeds the swing current. The change in magnitude of sequence component-based technique serves the goal due to the tiny amount of sequence components left during the swing condition. A suitable threshold is selected and cumulative sum of \(\Delta \left| {\overline{I}_{2} } \right|\) and \(\Delta \left| {\overline{I}_{0} } \right|\) based technique has been used in this paper for better fault detection at the time of power swing. Being so versatile, cumulative sum (CUSUM) is used to detect sudden changes. The CUSUM-based approach largely has application in fault detection in a transmission line, based on sampled values of current signals [19].

Waveforms during ag-fault (all values in p.u.)

Waveforms during three-phase fault. (all values in p.u.)
When changes in the zero and negative sequence components of currents are provided as input signals, CUSUM is employed to produce a decent index for defect detection during power swing. The index calculation method is as follows,
where, \(\overline{I}_{2} \) represents negative sequence component, \(\overline{I}_{0 }\) represents zero-sequence component, and \(\alpha = {\text{e}}^{{j\frac{2\pi }{3}}}\). \(\overline{I}_{a} , \overline{I}_{b}\) and \(\overline{I}_{c}\) are phase currents.
The derived signal for CUSUM is obtained as, (change in zero and negative sequence components),
Here, k represents the kth iteration.
For \(d_{0}^{k} > \varepsilon_{1} \) and \(d_{2}^{k} > \varepsilon_{2 } \) the CUSUM test can be proposed as,
And similarly,
where the indices \(h_{0}^{k}\) and \(h_{2}^{k} \) are the test statistics and \(\varepsilon_{1}\) and \(\varepsilon_{2} \) represent the drift parameters. A fault is registered if,
i.e., if any one of the above two conditions is true.
Where \(h_{1} \) and \(h_{2} \) are constants and should ideally be zero. To improve the performance of the detector, \(\varepsilon_{1}\) and \(\varepsilon_{2}\) provide effects equivalent to a low pass filter. When \(d_{0}^{k} > \varepsilon_{1} \) and \(d_{2}^{k} > \varepsilon_{2 } ,\) the \(h_{0}^{k}\) and \(h_{2}^{k}\) values increase by a factor of \(d_{0}^{k} - \varepsilon_{1}\) and \(d_{0}^{k} - \varepsilon_{2,}\) respectively. With the use of additional samples of current, the CUSUM approach gives a simple way to determine a fault condition (7). Following the evaluation of each pair of fault detection indices. In case of power swing condition only, the values of \(d_{0}^{k}\) and \(d_{2}^{k}\) will be less than \(\varepsilon_{1}\) and \(\varepsilon_{2}\), and hence \(h_{0}^{k}\) and \(h_{2}^{k} \) will be zero. The performance of the algorithm depends on the selection of values for \(\varepsilon_{1}\), \(\varepsilon_{2}\), \(h_{1} \) and \(h_{2}\). As stated earlier, power swing is balanced phenomenon, but a slight amount of negative sequence is obtained in the process of phasor expansion which gradually rises with the rise in slip frequency of swing cycle. For the CUSUM technique discussed for zero and negative sequence components, the values of \(\varepsilon_{1}\) and \(\varepsilon_{2}\) are selected such that \(d_{0}^{k}\) and \(d_{2}^{k} \) are zero amidst power swing (for both unbalanced and balanced power swing conditions), and finally helps to maintain the fault detection index \(h_{0}^{k}\) and \(h_{2}^{k}\) equal to zero.
In this paper the values of \(\varepsilon_{1}\) and \(\varepsilon_{2}\), set to 0.05 suits the purpose for a power swing with a slip frequency of 4.3 Hz. A typical power system's slip frequency is usually around 7 Hz. [14]. The numbers used for \(h_{1} \) and \(h_{2}\) allow the CUSUM algorithm to maintain the relaying scheme's balance of dependability vs. security and speed vs. accuracy criteria. The value of \(h_{1}\) is selected as 50 and value of \(h_{2}\) is selected as 20. [18]. The algorithm is tested for different cases of faults with delta near to 180°, and for faults at the far end of the transmission line.
4 Results
The proposed CUSUM technique [17] has been checked for symmetrical, asymmetrical, and high resistance faults, among other things. In a line with series compensation, the phenomenon of sub-synchronous resonance modulates voltage and current signals.
The basic component is estimated using the DFT. Considering phase—an as reference, sequence components are estimated. The reference value of \(\varepsilon_{1}\) and \(\varepsilon_{2}\) were set at 0.05 each and \(h_{1}\) = 50 and \(h_{2} \) = 20. The voltage and current waveforms reach their highest and minimum values when the power swing is kept close to 180°. At this instant, change in current and voltage will be insignificant. Thus, detecting fault during power swing becomes difficult when δ is close to 180°. The algorithm was tested at critical conditions, fault was created at 2.6 s when δ equals 175° with a slip frequency of 4.3 Hz. Faults that occur at far ends have a very small value of current, preventing MOV conduction and may result in current inversion. Faults are not identified under such conditions. Therefore, the testing of the algorithm is done at 150 km for phase faults, 240 km for line faults, and 200 km for symmetrical faults. In this paper, output 1 implies fault, and 0 implies no fault.
4.1 Fault in the Line with Series Compensation with Three Phases
In nature, both three-phase faults and power swing are balanced. The presence of negative sequence at the initial and subsequent periods helps in detecting fault at the time of power swing. A fault was induced at 2.6 s, 175° in the course of power swing at 200 km away from the relay position in line 1 for testing the algorithm. Unbalance is noted throughout the transient, and the onset of a 3-phase fault raises the CUSUM index. As seen in Fig. 5, the defect is identified shortly after it occurs, and a trip signal is generated instantly.

Sequence currents, Index, and trip signal for three-phase fault amidst power swing (all values in p.u.)
4.2 Line-to-Ground Fault in a Line with Series Compensation with Low Resistance
Negative sequence current is significant during power swing due to modulating frequency component in fault signals. Zero-sequence component is also present that makes fault detection possible even for asymmetrical power swings. The method was tested with a fault resistance of 5 Ω at 5 km for line-to-ground fault. Fault is initiated at 2.6 s and δ equals 175°. The CUSUM index is zero before the fault inception as in Fig. 6 and grows once the fault is detected. After fault detection, a trip signal is immediately generated.

Sequence currents, Index, and trip signal for ag-fault at the time of power swing (all values in p.u.)
4.3 High Fault Resistance in Line-To-Ground Fault
The fault detection with a high fault resistance implies a high value of fault current also δ equals 180°. An ag-fault with fault resistance 200 Ω was induced at 2.6 s at 175° amidst power swing at 150 km away from the relay position in line 1 for testing the algorithm. Figure 7 indicates that the fault is recognized and cleared after 2.6 s.

ag-fault with high resistance
4.4 Line-to-Line Fault
Negative sequence component being significant because of the modulating frequency helps in fault detection even though the zero-sequence component is zero. At 240 km away from the relay location, a line-to-line fault with a fault resistance of 200 Ω was induced at 2.6 s at 175°. Figure 8 output 1 shows that the issue has been discovered and cleared after 2.6 s.

Sequence currents, Index, and trip signal for line-to-line fault amidst power swing (all values in p.u.)
4.5 Double Line-to-Ground Fault in Series Compensated Line
In a LLG fault, both negative and zero-sequence components are significant to raise the CUSUM index and generate the trip signal. At 50 km from the relay station, an LLG fault with fault resistance 200 Ω was induced at 175°. After fault initiation, the problem is recognized and removed after 0.4 s using the aforementioned process, as shown in Fig. 9.

Double line-to-ground fault result (all values in p.u.)
5 Comparative Study of the Algorithm
The conventional techniques of the rate of change of swing center voltage, superimposed current components, and rate of change of resistance is used to detect faults in an uncompensated line amidst power swing. The performance of the transmission line for the above techniques is compared with the change in R and SCV for the same system. It is clearly observed that for different types of faults, R and SCV should remain constant with very small magnitude amidst fault period. But in a line with series compensation, R and SCV are fluctuating amidst fault period. Also, the value of R when the SCV is high at the start of a fault, the fault detection process is noticeably delayed. As a result, R and SCV change in a line with series compensation, hence they cannot be used to detect a malfunction during a power swing.
Different simulations were run for various fault types at various fault sites and fault inception times. The frequency of the slide is kept constant at 4.3 Hz. For the 50 Hz system, the results clearly indicate that asymmetrical and symmetrical faults are detected within half a cycle for the 50 Hz system.
6 Conclusion
A defect detection technique for a line with series compensation is presented in this research amidst power swing. The problem is detected using cumulative sum of the changes in zero-sequence current and negative sequence current. The proposed technique’s performance has been evaluated for various sorts of faults. When compared to existing techniques, the proposed method detects faults in half the time and is an improvement.
Zero-sequence components are present in a system if it involves grounding. During fault, presence of zero-sequence current \(\overline{I}_{0}\), would mean that the resultant fault is some type of ground fault. If \(\overline{I}_{0}\), is present in a significant amount, then its CUSUM will exceed the constant \(h_{1}\), as is the result, shown in Figs. 6, 7, 9, and 10, signifying that a type of ground fault has occurred. If \(\overline{I}_{0}\), is bare minimum such that \(h_{0}^{k}\) remains less than \(h_{1}\), then the index will remain zero as shown in Figs. 5 and 8, meaning the fault which occurred is not a ground fault (Fig. 11).

Comparison of SCV, resistance variation, and index variation for ag-fault

Comparison of SCV, resistance variation, and index variation for three-phase fault
Hence, by including \(\overline{I}_{0}\), in the CUSUM technique for fault detection during power swing in a line with series compensation, the nature of the fault, whether it’s a ground fault or not, can be determined, alongside with the detection of the fault, using the \(\overline{I}_{2} \) CUSUM technique. The knowledge of type of fault also helps in deciding the protection approach of lines, as well as the severity of the fault and damage it can cause.
Since CUSUM of negative and zero sequences current component is used, the detection method is immune to Capacitor Control Voltage Transformer (CCVT) transients. CUSUM of zero and negative sequence component detects both symmetrical and asymmetrical faults at the time of symmetrical or asymmetrical power swing.
References
IEEE Power System Relaying Committee of the IEEE Power Engineering Society (2005) Power swing and out-of-step considerations on transmission line. Rep. PSRC WG D6, Jul 2005. Available http://www.pes-psrc.org
Abdelaziz AY, Ibrahim AM, Mansour MM, Talaat HE (2005) Modern approaches for protection of series compensated transmission lines. Elect Power Syst Res 75:85–98
Mechraoui A, Thomas DWP (1997) A new principle for high resistance earth fault detection during fast power swings for distance protection. IEEE Trans Power Deliv 12(4):1452–1457
Apostolov AP, Tholomier D, Richards SH (2004) Superimposed components based sub-cycle protection of transmission lines. In: Power systems conference and exposition, IEEE PES, vol 1, pp 592– 597
Lotfifard S, Faiz J, Kezunivic M (2010) Detection of symmetrical faults by distance relays during power swings. IEEE Trans Power Delivery 25(1):81–87
Benmouyal G, Hou D, Tziouvaras D (2004) Zero-setting power-swing blocking protection. In: Presented at the 31st annual western protective relay conference, Spokane, WA
Mechraoui A, Thomas DWP (1997) A new principle for high resistance earth fault detection during fast power swings for distance protection. IEEE Trans Power Del 12(4):1452–1457
Apostolov AP, Tholomier D, Richards SH (2004) Superimposed components based sub-cycle protection of transmission lines. In: Proceedings of IEEE power engineering society conference and exposition, vol 1, pp 592–597
Gao ZD Wang GB (1991) A new power swing block in distance protection based on a microcomputer-principle and performance analysis. In: Proceedings of international conference on advances in power system control, operation and management, Hong Kong, China, vol 2, pp 843–847
Lin X, Gao Y, Liu P (2008) A novel scheme to identify symmetrical faults occurring during power swings. IEEE Trans Power Del 23(1):73–78
Lotfifard S, Faiz J, Kezunovic M (2010) Detection of symmetrical faults by distance relays during power swings. IEEE Trans Power Del 25(1):81–87
Zadeh HK, Li Z (2008) A novel power swing blocking scheme using adaptive neuro-fuzzy inference system. Elect Power Syst Res 78:1138–1146
Gao ZD, Wang GB (1991) A new power swing block in distance protection based on a microcomputer-principle and performance analysis. In: International conference on advances in power system control, operation and management, Hongkong, vol 2, pp 843–847
Brahma SM (2007) Distance relay with out-of-step blocking function using wavelet transform. IEEE Trans Power Delivery 22(3):1360–1366
Alture HJ, Mooney JB, Alexander GE (2008) Advances in series compensated line protection. Available www.selinc.com/20081022, TP6340-01
Novosel D, Phadke AG, Saha MM, Lindahl S (1997) Problems and solutions for microprocessor protection of series compensated lines. In: Proceedings of conference developments in power system protection, pp 18–23
Nayak PK, Pradhan AK, Bajpai P (2013) Fault detection technique for series-compensated line. IEEE Trans Power Deliv 28(2)
Gustafsson F (2000) Adaptive filtering and change detection. Wiley, New York
Mohanty SR, Pradhan AK, Routray A (2008) A cumulative sum-based fault detector for power system relaying application. IEEE Trans Power Del 23(1):79–86
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Mehta, A., Gautam, G., Kumar, P., Kumar, J. (2023). A Combined Sequence Approach Based on Cumulative Sum for Detection of Fault Amidst Power Swing for Line with Series Compensation. In: Namrata, K., Priyadarshi, N., Bansal, R.C., Kumar, J. (eds) Smart Energy and Advancement in Power Technologies. Lecture Notes in Electrical Engineering, vol 926. Springer, Singapore. https://doi.org/10.1007/978-981-19-4971-5_27
Download citation
DOI: https://doi.org/10.1007/978-981-19-4971-5_27
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-4970-8
Online ISBN: 978-981-19-4971-5
eBook Packages: EnergyEnergy (R0)