
Abstract
Reduction Gearbox are widely used in many industrial applications like Conveyer belts in underground mines, Extruders, Cranes, Crushing Machine, etc. which require high power to function. This paper focuses on designing an optimized 3-stage gearbox. 3-Stage gearbox is chosen as it can work under high gear ratio very efficiently and effectively for speed reduction. The motive to develop a new gearbox is to improve in terms of safety, durability, and efficiency. Helical gears are chosen for gearbox design as they are extensively used in industrial operations for power transmission under heavy loads with smoother and noiseless operation. In this paper the gearbox is designed, considering the requirements of a mining conveyer belt. The gearbox is modeled using Solidworks and then analyzed based on finite element analysis method using Ansys workbench. FEA analysis is conducted to measure and analyze the safety factor, shear stress and total deformation. Finally, the optimal design of gearbox is achieved to meet functional as well as reliability requirements in the field.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
An underground mine needs a 3-stage Industrial gearbox to facilitate the movement of a conveyor belt which carries coal from underground to the surface. The motive to develop a new gearbox is to improve in terms of safety, durability and efficiency. The aim of project is to design an optimized gearbox which could be later manufactured by the workshop. Helical gears are chosen for gearbox design as they are extensively used in industrial operations for power transmission under heavy loads with smoother and noiseless operation. In a gear, the surface strength, shear force and bending stress of the gear tooth majorly contribute to the failure of the gears. The gearbox is modelled using Solidworks and then analyzed by finite element analysis method using Ansys workbench. The static/transient motion analysis is conducted to measure and analyze the safety factor, shear stress, factor of safety and total deformation. Finally, the optimal design of gearbox is achieved to meet functional as well as reliability requirements in the field [1, 2].
Neeraj et al. [3] developed a robust and axiomatic design using a property-based approach to design applying functional requirements and design parameters. The different operating conditions of a gearbox are considered in the paper. The paper presents a complex methodology for designing of the gearbox using CAD software, has followed a similar approach using functional requirements and design parameters using modern software. Sonali et al. [4] in their paper design and FEM analysis of helical gear have discussed the problem of gear breakdown in speed reduction gearbox that is resolved by changing the current material by steel with the help of AGMA and FEM analysis method on the Gear and Pinion. Module of the gear is calculated by the estimated stress which can withstand the loading conditions. We have used the modified Lewis beam strength method to perform Ansys analysis.
Ghewade et al. [5] in their work thermal analysis of helical and spiral gear train presented the study of thermal analysis of helical and spiral gears transmission gearbox. Firstly, the gearbox is designed using the known formulas. The 2D drawing of the gear is then converted into a 3D model by using CAD software. The temperature relation is tested for no load and full load condition. Venkatesh et al. [6] conducted a structural analysis on a helical gear in high speed operations like marine engines. The design parameters of the model were calculated by theoretical methods. Different materials were analyzed to find the stress and deflection of the tooth. The results of theoretical analysis and FEM analysis are compared to each other. The conclusion was to get the material which is suitable for the marine engines. We have followed a similar method for stress analysis and material selection.
May and New [7] in their work stress analysis on spur gears using Ansys workbench have explained that driving gear tooth meshes with the driven gear tooth to transmit power. Analysis of total deformation and bending stress of gear is the necessity of the gear design. In this paper, Hertz equation and ANSYS workbench is used for performing contact stress analysis on stainless-steel spur gear.
Niyamat and Bicha [8] in their project have researched about the design and analysis of helical gear having involutes profile. In this project the helical gear having involutes profile is modeled on the CATIA V5R16 software and ANSYS software is used to perform static structural and modal analysis. We decided to use a helical gear based on inference we got from the following and also followed a similar process to design helical gear with involutes using Solidworks.
Naresh and Chandrudhu [9] in the project titled designed and analysis of helical gear have discussed about helical gears which are widely used in industries. In this project they have designed the helical gear by using Solidworks software and Solidworks simulation is used for analysis of gear by applying different materials and different loads on it. We approached the designing of helical gear using Solidworks based on the guidelines followed in this paper. Many other projects related to gear designing and analysis were studied to find the best method to use for this work [10,11,12,13,14,15,16,17]. Many studies involve the use of alternative materials like plastics and aluminum for better performing gearbox. Also methods like the use of geartrax software for designing of gears were used in many studies, alternatively Solidworks and python is used for designing and calculations in this work.
The objective of this paper is to design a 3-stage industrial gearbox for operating a conveyer belt used to transport coal from beneath the surface to surface level in an underground mine conveyor belts are used. The motor used to facilitate the movement of the conveyor belt has an output of 1400 rpm, at that rpm, it is too high because at that speed the conveyor belt wouldn’t be able to retain coal as coal would spurt out of the conveyor belt, the fast motion of the conveyor also becomes a source of danger for the miners at work and also at that speed the chances of belt slippage is very high. To improve the efficiency, safety and durability of the conveyor an industrial gearbox is used for speed variation. The gearbox is designed assuming the length of the conveyer belt which is assumed to be 60 m, the required output speed is 1–1.5 m/s and the capacity of the conveyer belt is 200 ton/hr. This paper specifies the whole process of designing a safe and reliable industrial 3-stage gearbox for the application of conveyer belt used in coal mining.
2 Design and Force Calculations
2.1 Power Requirement for the Conveyer Belt
The power requirement for the belt is calculated using the formula in Eq. (1)
where, Fc = Equipment friction factor = 0.0225, L = Horizontal center to center distance = 60 m, Tf = terminal friction constant = 60 m, C = capacity = 200 ton/hr, Q = mass of moving parts (assuming idler diameter = 152 mm and belt width = 2000 mm)
S = Belt speed
Size of head pulley = 500 mm, \({\text{Circumference of}} {\text{ head}} {\text{ pulley}} = 2 \times \pi \times r = 1.57{\text{m}}\)
H = net change in elevation (assuming elevation of 15°).
Substituting the values in above formula we get power (P) = 15.15 kW.
∴Power transmitted through the gearbox is 15.15 kW.
Standard proportions of gear:
Table 1 shows the standard proportions in module (m) for the gear systems [18].
For design and force calculations a standard model was considered for designing the helical tooth. All the calculations are done considering a 20° full depth involute system.
2.2 Formula for Calculating Gear Parameters
The formulas [1] used for calculating the torque and forces on the gears are presented in Eq. (2), (3), (4) and (5)
The formulas [1] used for calculating Addendum and dedendum Diameter are presented in Eqs. (6) and (7) respectively
The formulas [1] used for calculating Pitch circle diameter of pinion and gear are presented in Eqs. (8) and (9)
2.3 Python Code
The Python code has been implemented to compute gear design parameters and forces using the Eqs. 2, 3, 4, 5, 6, 7, 8 and 9, the code has been provided in Appendix.
2.4 Design parameters
For calculating the design parameters and forces standard modules were used like 3, 5 and 8 mm for first, second and third set of gears respectively. The numbers of teeth of each gear were calculated by iterative method for getting the desired gearbox ratio. The python code automatically calculates the diameters and forces after entering the required values like power, rpm, number of teeth, angles and module for each set of gear and pinion. The design parameters and forces for all set of pinion and gear are presented in Table 2.
2.5 Material Selection
Special attention has to be given to the material selection of the gearbox as it will decide the weight, life and cost of the product. In a gear box the gears are the main components as they are the one under wear and tear due to high loading conditions. So, material selection becomes a crucial stage in the designing process. Material is selected by analyzing its physical properties, manufacturing properties and cost. The four materials that are taken into consideration for the gears are Aluminum Alloy, Ductile Cast, Mild Steel and Iron Alloy Steel. The mechanical properties that will be used for evaluation are Tensile strength, Yield strength, Density and Hardness. The comparison of the metals based on mechanical properties is presented in Table 3.
2.6 CAD Model
CAD modeling of a pinion, gear and assembly of gearbox was done using Solidworks [18, 19]. A 3d model of the components is necessary for finite element method (FEM) analysis. Solidworks is solid modeling software used to design the components in 3 dimensions. There are a total of 5 components in the gearbox assembly as follows:
Input Shaft and Gear
Figure 1 represents the input shaft with the gear of the gear box. A high rpm motor will be attached on one end of this shaft.

Input shaft and gear
1st Motion Shaft and Gear
As this is a three stage gearbox, there will be a total of 4 shafts with a total of 6 gears mounted on it. Figure 2 represents the 1st motion shaft. This shaft has two gears mounted on it. One of the gear will be linked with the input shaft gear to start the reduction process.

1st motion shaft and gear
2nd Motion Shaft and Gear
The second motion shaft also has two gears on it. One of the gears will be linked to the gear of 1st motion shaft and the other gear will be linked to the gear of the output shaft gear. Figure 3 represents the 2nd motion shaft.

2nd motion shaft and gear
Output shaft and gear:
Figure 4 depicts the output shaft and gear.

Output shaft and gear
Gearbox Casing
Figure 5 represents the gearbox casing. It is used to provide mechanical support to the shaft and gears.

Outer casing
Assembly
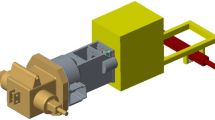
Figures 6, 7 and 8 represents the complete assembly of the gearbox in different views.

Gear assembly (side view)

Gear assembly (isometric view)

Complete assembly (isometric view)
3 Meshing
Meshing is done to divide the whole component into a number of smaller discrete elements for computation of stresses, strains, deformation, etc. at a particular point. Tetrahedron elements were used for meshing the entire structure using mesh size as fine with smooth transition. Fine, smooth transition and tetrahedron mesh was chosen to get more accurate results.
4 Boundary Conditions
For finding the strength of the gears, the driven gear was made fixed and the driving gear that will transfer power to the driven gear was given a moment in the direction of motion which were calculated using formulas and python codes. The gear bigger in size were the driven gear and were made fixed by fixing the inner surface of the gear. Moment of the particular set of the gear was applied on the inner surface of the driven gear which is smaller in size. Frictionless support was added to the sides on the gear to maintain alignment of the gears.
5 Finite Element Analysis
Finite element analysis was performed on ANSYS workbench [19, 20]. The calculated tangential, radial and axial forces and moment were considered as inputs for the analysis. Output results were equivalent stress (von-Mises), total deformation and FOS (stress) for all set of gears.
5.1 Equivalent Stress (von-Mises)
Figures 9, 10 and 11 shows the total deformation of set 1, 2 and 3 respectively on applying all the necessary boundary conditions and forces on the gears. It is observed that the maximum equivalent stress value is under allowable limit. Thus the gears are safe.

Equivalent stress (von-Mises) analysis of 1st set of gears

Equivalent stress (von-Mises) analysis of 2nd set of gears

Equivalent stress (von-Mises) analysis of 3rd set of gears
5.2 Total Deformation
Figures 12, 13 and 14 shows the total deformation of set 1, 2 and 3 respectively on applying all the necessary boundary conditions and forces on the gears. The deformation in the gears is found to be in the figures of 10 raised to the power of −6. Hence there is very less compliance.

Total deformation of 1st set of gears

Total deformation of 2nd set of gears

Total deformation of 3rd set of gears
5.3 Shear Stress
Figures 15, 16 and 17 shows the total deformation of set 1, 2 and 3 respectively on applying all the necessary boundary conditions and forces on the gears. The values of shear stresses are found to be under permissible limit. Hence the design is safe.

Shear stress of 1st set of gears

Shear stress of 2nd set of gears

Shear stress of 3rd set of gears
5.4 Stress Tool (Factor of Safety)
Figure 18, 19 and 20 shows the total deformation of set 1, 2 and 3 respectively on applying all the necessary boundary conditions and forces on the gears. The values of factor of safety are well above the required values. Thus, the design is safe.

Stress FOS of 1st set of gears

Stress FOS of 2nd set of gears

Stress FOS of 3rd set of gears
5.5 Fatigue Tool (Factor of Safety)
Figures 21, 22 and 23 shows the total deformation of set 1, 2 and 3 respectively on applying all the necessary boundary conditions and forces on the gears. The values of factor of safety are observed to be a minimum of 2. Thus, the design is safe to handle at least twice the loads.

Fatigue FOS of 1st set of gears

Fatigue FOS of 2nd set of gears

Fatigue FOS of 3rd set of gears
6 Result and Discussion
Grid Independence study was done for all the 3 set of gears. For all the three set of gears body sizing and face sizing functions were used to reduce the mesh size continuously till recurring values of stresses were obtained. The theoretical calculations using the python code gives the dimensions and other specifications of all the set of gears. The module for 3 set were considered to be 3, 5 and 8 mm and the gear parameters are calculated using the formulas and python code. After conducting FEA analysis on all the set of gears, the results were found and grid independence study is done to achieve mesh convergence of which the results are depicted in Table 4. From the grid independence study it can be seen that the minimum stress factor of safety for first set is 5.23, for second set is 3.76 and for third set is 3.47. As per the analysis it can be seen that the stress factor of safety is greater than 1 which specifies that all the gears are safe to use under the applied loads. Also the total deformation for the 3 set of gears is 4.6121e-6, 1.8486e-5 and 1.7305e-5 which is very less and cannot affect the performance of the gearbox. From the results it can be concluded that the gear box is safe for the applied loads and its further application.
7 Conclusion
From the research conducted, it can be concluded that the design of a 3-stage industrial gearbox was successfully completed. The calculations were performed considering all the loads on the gears to design a reliable system. The CAD model was designed on Solidworks software and FEA analysis was done on ANSYS workbench. Finite element analysis was done on the CAD models using the calculated parameters to check the durability of the system. The gearbox has been properly analyzed considering many factors like stress, deformation, factor of safety, shear stress, fatigue damage and thus it can be concluded that the gearbox is safe and durable and can be used in the mining applications.
Abbreviations
- Power:
-
Operating power
- N:
-
Rpm
- m:
-
Module
- alpha:
-
Pressure angle
- Psi:
-
Helix angle
- Zp:
-
Number of pinion teeth
- Zg:
-
Number of gear teeth
- i:
-
Gear ratio
- ha:
-
Addendum height
- hf:
-
Dedendum height
- t:
-
Tooth thickness
- dp:
-
Pitch circle diameter of pinion
- dg:
-
Pitch circle diameter of gear
- dap:
-
Addendum circle diameter of pinion
- dfp:
-
Dedendum circle diameter of gear
- dag:
-
Addendum circle diameter of gear
- dfg:
-
Dedendum circle diameter of pinion
- Mt:
-
Transmitted torque
- Pt:
-
Tangential force
- Pa:
-
Axial force
- Pr:
-
Radial force
References
Bhandari VB (2010) Design of machine elements. Tata McGraw-Hill Education
Khurmi RS, Gupta JK (2005) A textbook of machine design. S. Chand publishing
Patel N, Gupta T, Wankhede A, Warudkar V (2017) Design and optimization of 2-stage reduction gearbox. Int J Eng Develop Res 5(2):541–552
Mote SA, Gaur AV, Gujale AB (2018) Design and FEM analysis of helical gear, Int J Eng Res Adv Technol 4(4):13–20
Ghewade DV, Nagarale SS, Pandav AN (2016) Thermal analysis of helical and spiral gear train. Int J Ignited Mind 3(1):1–5
Venkatesh B, Kamala V, Prasad AMK (2010) Design, modelling and manufacturing of helical gear. Int J Appl Eng Res 1(1):103–114
Thu MP, Min NL (2018) Stress analysis on spur gears using ANSYS Workbench 16.0. Int J Sci Eng Appl 7(8):208–213
Mulla, NA, Bicha K (2014) Design, modeling and structural analysis of helical gear for ceramic and steel material by using ANSYS. Int J Eng Technol Sci 1(2):28–32
Naresh K, Chandrudhu C (2016) Design and analysis of helical gear. Int J Prof Eng Stud 6(4):194–203
Gupta A, Yashvanth AP, Rao LB (2021) Design of gears using aluminium 6061-t6 alloy for formula sae steering system. In: Recent trends in mechanical engineering, pp 489–505. Springer, Singapore
Bardiya N, Karthik T, Rao LB (2014) Analysis and simulation of gearless transmission mechanism. Int J Core Eng Manage 1(6):136–143
Gopal VV, Rao LB (2017) Design and analysis of centrally mounted rotary fixture. Int J of Comput Aided Eng Technol 9(4):453–464
Patel T, Dubey A, Rao LB (2019) Design and analysis of an epicyclic gearbox for an electric drivetrain. Int J Recent Technol Eng 8(3):6834–6842
Cherian S, Azam AB, Rao LB (2021) Analysis of various cooling mechanisms for plastic gears using decision tree algorithms. In: Recent trends in mechanical engineering, pp 407–418. Springer, Singapore
Gujaba KP, Parashar S, Rao LB (2021) Design and analysis of permanent magnetic gears. In: Recent trends in mechanical engineering, pp 521–530. Springer, Singapore
Sekhar K, Dharmadhikari P, Panchal S, Rao LB (2021) Design and optimization of a two-stage gearbox using GearTrax.“ In: Recent trends in mechanical engineering, pp 445–477. Springer, Singapore
Anand S, Srikeshav AD, Sharran B, Rao LB (2021) Design and analysis of helical teeth harmonic drive. In: Recent trends in mechanical engineering, pp 507–519. Springer, Singapore
Damodaran GR (2018) PSG design data book (PSG College of Technology, Kalaikathir, Achchagam, Coimbatore
Solidworks user manual, Version 18 (2020)
ANSYS user manual, Version 19.2 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
Python Code
-
import math
-
pi = math.pi
-
power = float(input(“Enter Power\t”))
-
N = float(input(“Enter rpm\t”))
-
m = float(input(“Enter module\t”))
-
alpha = float(input(“Enter pressure angle\t”))
-
psi = float(input(“Enter helix angle\t”))
-
zp = float(input(“Enter Number of teeth of pinion\t”))
-
zg = float(input(“Enter Number of teeth of gear\t”))
-
i = zg/zp
-
ha = m
-
hf = 1.25*m
-
t = 1.5808*m
-
dp = zp*m/(math.cos(psi*pi/180))
-
dap = m*(zp/(math.cos(psi*pi/180)) + 2)
-
dfp = m*(zp/(math.cos(psi*pi/180))-2.5)
-
dg = zg*m/(math.cos(psi*pi/180))
-
dag = m*(zg/(math.cos(psi*pi/180)) + 2)
-
dfg = m*(zg/(math.cos(psi*pi/180))-2.5)
-
Mt = (60,000,000*power)/(2*pi*N)
-
Pt = 2*Mt/dp
-
Pa = Pt*math.tan(psi)
-
Pr = Pt*(math.tan(psi)/math.cos(psi))
-
dict1
-
{‘ha’:ha,‘hf’:hf,‘t’:t,‘dp’:dp,‘dap’:dap,‘dfp’:dfp,‘dg’:dg,
-
‘dag’:dag,‘dfg’:dfg,‘Mt’:Mt,‘Pt’:Pt,‘Pa’:Pa,‘Pr’:Pr}
-
for i in dict1:
-
print(i,dict1[i])
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Patil, S.S., Parate, S.C., Kulkarni, H.V., Bhaskara Rao, L. (2023). Design and Optimization of a 3-Stage Industrial Gearbox. In: Dikshit, M.K., Soni, A., Davim, J.P. (eds) Advances in Manufacturing Engineering. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-4208-2_21
Download citation
DOI: https://doi.org/10.1007/978-981-19-4208-2_21
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-4207-5
Online ISBN: 978-981-19-4208-2
eBook Packages: EngineeringEngineering (R0)