
Abstract
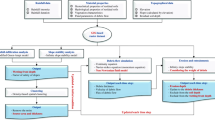
This study describes a prediction method for rainfall-induced landslides (initiation) and subsequently debris flows (propagation) in regional scale areas. Special attention is given to the calculation of the propagation of debris flows by considering rainfall infiltration into soil slopes and soil entrainments by debris flows. The proposed method was verified by comparing the numerical results and the measured ones reported by the previous research. As a result, numerical predictions and observations were quite similar in terms of the front position, the velocity, volume, and momentum of debris flows. Even when applied to natural mountain slope with complicated terrain, numerical results and observations had good agreement with each other. As a result, the proposed combined method for landslides and debris flows overcomes the problem of separating the landslides analysis and the debris flow simulation. Especially, the proposed method can analyze the effects of rainfall on entrainments by debris flows as well as rainfall-induced landslides and the behavior of debris flows.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
1 Introduction
Large-mass and high-velocity debris flows can be fatal to human society and infrastructures. Solving these dynamic problems with extremely large deformations over a short event time is slightly different from traditional problems in geotechnical engineering. It is highly difficult to reproduce debris flows in the field, so lab- or large-scale experiments or numerical simulations are usually carried out to better understand the mechanisms and assess the risks (Chen and Lee 2000).
When numerically simulating debris flows, many numerical models are usually based on the Savage-Hutter theory (Savage and Hutter 1989). These flow models have to consider constant parameters such as the lateral earth pressure coefficient and the friction angle, which are usually acquired by independent experiments. However, these models are insufficient for reflecting the genuine behaviors of the debris mixture. Previous studies have proposed effective stress-dependent frictional resistance (Iverson 1997), a μ-parameterization model (Pouliquen and Forterre 2001), a thermo-pore-mechanical model (Vardoulakis 2000), and the velocity-dependent friction law (Liu et al. 2016).
Some studies have attempted to use a rheological model for non-Newtonian fluids or turbulent flows in shallow water equations to represent debris mixture behavior (Hong et al. 2020; Laigle and Coussot 1997). The rheological model is more flexible in representing the velocity-dependent resistance than the Coulomb friction model. Additionally, previous studies have reported that Coulomb frictional resistance from constant bed friction could be insufficient to dampen debris velocity (Hutter and Greve 1993). However, the viscous resistance in the rheological model could be much lower than the Coulomb frictional resistance when the debris flow has some thickness (Iverson 2003), and the estimation of rheological properties in debris mixtures has been less studied than in the Coulomb friction model.
Another problem facing rheological models of debris flows is that rheological properties are actually a function of the solid phase (Kaitna et al. 2007). This means that the solid volume fraction should be tracked to ultimately obtain more realistic and accurate results from a simulation considering the rheological model. Additionally, the mixture density cannot be constant when multiple debris flows with different densities merge at a confluence. However, most previous numerical studies have used single-phase models that assume a constant mixture density (Chen and Lee 2000). A few studies have recently suggested two-phase models for debris flows that contain continuity and momentum equations for both the solid and fluid phases (Pudasaini 2012). These two-phase models have a high potential to describe debris flow behaviors more realistically and overcome the limitations of current single-phase models. However, a theoretical basis with experimental evidence on the fluid-solid interactions employed in these two-phase models is still insufficient, and the models require greater computational effort and more input parameters than single-phase models.
To solve the shallow water equations for debris flows, many numerical studies have used the smoothed particle hydrodynamics (SPH) method and the finite volume method (FVM). SPH is a meshless and full Lagrangian-type approach that solves the individual dynamics of fictitious fluid particles by using Newton’s second law. The fluid-fluid and fluid-solid interactions are applied to the particles by volume-averaging kernel functions that are macroscopically recovered by shallow water equations. However, SPH requires a sufficient number of particles to obtain an accurate solution, and the computational cost rapidly increases as the number of particles increases. Unlike SPH, the FVM is a mesh-based and Eulerian-type approach based on a divergence theorem that is specialized for computational fluid dynamics. Although SPH is flexible and can be recovered by shallow water equations, the numerical solutions obtained by SPH weakly and asymptotically satisfy the shallow water equations. In contrast, the FVM for debris flows requires sophisticated numerical treatments such as flux difference splitting schemes and can more strictly and accurately produce discontinuous solutions for shallow water equations.
This paper presents a simplified depth-averaged debris flow model for tracking density evolution. The developed model uses Hershel-Buckley rheology in internal and basal frictions and considers complex terrains and entrainments. In particular, the interaction between solid-fluid phases in the mixture is ignored. A finite volume formulation of the proposed model is presented with relevant numerical schemes to obtain stable and accurate solutions.
2 Methodology
The governing equations derived by depth-averaging the Navier-Stokes equations are used to simulate debris flows as fluid. The continuity equations for solid phase and debris defined as the mixture, and the momentum equations of the mixture phase for the x- and y-axis are given as
where \(h\) is the debris height, \(\rho\) is the mixture density, and \({c}_{s}\) is the solid volume fraction. \({v}_{k}\) and \({v}_{k,s}\) are the depth-averaged velocity for each axis of the mixture and solid phases. \({\alpha }_{m}\) is a momentum correction factor and \(\overline{\tau }_{ij}\) is the depth-averaged shear stress.
\(\omega\) is a ratio of the basal surface area, and it can be written as
We assumed that the linear distribution of the flow velocity (parallel to basal surface) and the pressure (z-direction), then the bulk pressure p and the gravitational acceleration \(\widehat{g}\) are given as (Xia et al. 2013)
in which
where \({\varvec{H}}\) is the Hessian matrix of the surface elevation.
The basal friction stress of the fluid can be given as
where \(\mu\) is the debris viscosity.
This study uses the Herschel-Buckley model for the rheology of debris flow as
where \({\tau }_{y}\) is the yield stress, \(\gamma\) is the magnitude of the shear rate, \({k}_{0}\) is a consistency index, \(n\) is a flow index, and \({\mu }_{\mathrm{max}}\) is the maximum viscosity that prevents infinitely high viscosity when the shear rate approaches zero.
3 Modeling of Debris Flows in a Mountainous Area
3.1 Study Area Description
The study area is the catchment No. 30 in the mountains above Yu Tung Road, in the southeast of Tung Chung New Town in Lantau (Fig. 3.1). The top of the hill in the study area is sloping between 30\(^\circ\) and 45\(^\circ\) and has a locally steep rock exposure area. In the midstream, hill slopes are typically between 15\(^\circ\) and 30\(^\circ\), and down to less than 15\(^\circ\) in bottom of the stream. Several debris flows were occurred at around 9:00 a.m. on June 7, 2008, and the debris flow occurred in the catchment No. 30 is the largest debris flow in the mountainous area near the Yu Tung Road. The volume of the landslide source at the top of the watershed was measured to be 2,350 m3 and the debris flowed into the adjacent drainage line. The maximum activity volume by entrainments is observed to increase to about 3,400 m3, and the run-out distance was estimated to be about 600 m. The landslide area was located at the elevation of 202 m southwest of the drainage line under the rocky outcrop. Based on the post-landslide topographic surveys, the landslide source included a lot of gravels of about 2,350 m3, with some silty of clayey sand and rocks. The slope failure area was about 32 m \(\times\) 50 m, and the maximum thickness was reported to be about 3 m. The slope of the failure surface varied between 35\(^\circ\) and 50\(^\circ\). All these descriptions were available from the GEO report No. 271 (2012) published by Geotechnical Engineering Office (GEO), Hong Kong.

The study area of Yu Tung Road historical landslides and debris flow case
3.2 Modeling and Input Parameters
The historical debris flow, 2008 Yu Tung Road debris flow, was simulated based on the provided topography and initial thickness of the landslide. Initial soil depth of the study area was assumed from 3 to 16 m based on the previous ground investigation of detailed study report of the study area (Kwan 2012). Internal friction angle of residual soil was determined as 30\(^\circ\) based on the previous study conducted by Law et al. (2017). Law et al. (2017) performed a series of back analyses on the debris flow in Yu Tung Road, 2008 using 3d-DMM model, and compared the analytical results with field observations. Basal friction angle and drag coefficient were determined as 11\(^\circ\) and 500 \(\mathrm{m}/{\mathrm{s}}^{2}\) based on the back-analysis results of GEO report No. 271 (2012). In this study, a series of back analyses was also performed previously to determine the initial dynamic viscosity of debris flows, and the initial dynamic viscosity of 0.1 Pa s was adopted in the debris flow modeling. Parameters for the simulation were summarized in Table 3.1. Figure 3.2a shows the elevation of initial state of study area, and the initial volume was applied at the top of the watershed from the detailed investigation for the debris flow.

Time-varying debris flow thickness of the study area
3.3 Results and Discussion
Debris profiles and changes of the elevation by entrainments and sediments at each representative times are shown in Fig. 3.2. As shown in Fig. 3.2b, f, soil erosions and entrainments were occurred over the path of the debris flow, and some debris materials were deposited on the drainage line. To analyze the erosion and deposit over the flow path of the debris flow, the time-varying volume of debris flow and the debris volume versus debris front position relation are also shown in Fig. 3.3 (Kwan 2012). The volume of the debris flow increased from the initial 2,350 m3 to a maximum of 3,480 m3, and gradually decreased as it deposited. The initial volume was fixed, and changes in the volume of debris flow are slightly different in the intermediate zone from about 200 to 350 m. Although there is some difference in intermediate zone, similar trends in the analytical results with observed volume and the maximum volume of debris flow are about to equal each other. Comparisons of time-varying front location and the front velocity with previous studies and field observed values are shown in Fig. 3.4. The analytical results by previous research (Law et al. 2017; Dai et al. 2017; Koo et al. 2017) are also compared with the results of this study and measured data reported in Geo report No. 271 (Kwan 2012). In comparison of the analytical results and measured data, the proposed method in this study slightly overestimated the time-varying front position of debris while that in the previous study also lightly underestimated, but the difference between the analytical results and measured data was very small (Fig. 3.4a). The front velocity of debris flows estimated in this study shown in Fig. 3.4b was also compared with the results of the previous research and the measured data. It is shown that the front velocity of debris flows by this study has a similar trend with the results from previous study and measured data. These numerical results are greatly governed by the input parameters, which are very close to the measured values because the input parameters were determined by the back-analysis.

Time-varying the volume of debris flow and debris front positions

Comparison of debris front positions and velocities with previous study
As a result of this watershed-scale historical debris flows case, it has been confirmed that the proposed method in this study can predict reasonably the mobility of debris flows (including the velocity and the front position) and the volume changes of debris reasonably in the actual land-scale debris flow prediction.
4 Conclusions
This work developed a simplified debris flow model with Hershel-Buckley rheology for tracking density evolution. A finite volume formulation of the debris flow model was also proposed for accurate and stable numerical simulations. Both the internal and basal frictions of the debris flow were considered in the model as well as the basal topology effect. A case of debris flows simulation was performed to validate the proposed method. One of the calibration cases is a field-scale experiment reported by a previous study, and it was used to compare the results of the proposed method with the previous study on the field-scale experiment. One of the real landslides and debris flow cases was simulated to compare the results by the proposed method with observations. By using the model developed in this study, it is possible to simulate not only reverse analysis after events but also the expandable debris flow induced by the input rainfall applied in engineering practice.
References
Chen H, Lee CF (2000) Numerical simulation of debris flows. Can Geotech J 37(1):146–160
Dai Z, Huang Y, Cheng H, Xu Q (2017) SPH model for fluid–structure interaction and its application to debris flow impact estimation. Landslides 14(3):917–928
Hong M, Jeong S, Kim J (2020) A combined method for modeling the triggering and propagation of debris flows. Landslides 17(4):805–824
Hutter K, Greve R (1993) Two-dimensional similarity solutions for finite-mass granular avalanches with Coulomb-and viscous-type frictional resistance. J Glaciol 39(132):357–372
Iverson RM (1997) The physics of debris flows. Rev Geophys 35(3):245–296
Iverson RM (2003) The debris-flow rheology myth. Debris-Flow Hazards Mitig: Mech Predict Assess 1:303–314
Kaitna R, Rickenmann D, Schatzmann M (2007) Experimental study on rheologic behaviour of debris flow material. Acta Geotech 2(2):71–85
Koo RCH, Kwan JS, Ng CWW, Lam C, Choi CE, Song D, Pun WK (2017) Velocity attenuation of debris flows and a new momentum-based load model for rigid barriers. Landslides 14(2):617–629
Kwan JSH (2012) Supplementary technical guidance on design of rigid debris-resisting barriers. Geotech Eng Office, HKSAR. GEO Report (270)
Laigle D, Coussot P (1997) Numerical modeling of mudflows. J Hydraul Eng 123(7):617–623
Law RP, Kwan JS, Ko FW, Sun HW (2017) Three-dimensional debris mobility modelling coupling smoothed particle hydrodynamics and ArcGIS. In: Proceedings of the 19th international conference on soil mechanics and geotechnical engineering, Seoul, pp 3501–3504
Liu W, He S, Li X, Xu Q (2016) Two-dimensional landslide dynamic simulation based on a velocity-weakening friction law. Landslides 13(5):957–965
Pouliquen O, Forterre Y (2001) Friction law for dense granular flows: application to the motion of a mass down a rough inclined plane. arXiv preprint cond-mat/0108398
Pudasaini SP (2012) A general two‐phase debris flow model. J Geophys Res: Earth Surf 117(F3)
Savage SB, Hutter K (1989) The motion of a finite mass of granular material down a rough incline. J Fluid Mech 199:177–215
Vardoulakis I (2000) Catastrophic landslides due to frictional heating of the failure plane. Mech Cohesive-Frict Mater: Int J Exp Modell Comput Mater Struct 5(6):443–467
Xia X, Liang Q, Pastor M, Zou W, Zhuang YF (2013) Balancing the source terms in a SPH model for solving the shallow water equations. Adv Water Resour 59:25–38
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Jeong, S., Hong, M. (2023). A Regional-Scale Analysis Based on a Combined Method for Rainfall-Induced Landslides and Debris Flows. In: Hazarika, H., et al. Sustainable Geo-Technologies for Climate Change Adaptation. Springer Transactions in Civil and Environmental Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-4074-3_3
Download citation
DOI: https://doi.org/10.1007/978-981-19-4074-3_3
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-4073-6
Online ISBN: 978-981-19-4074-3
eBook Packages: EngineeringEngineering (R0)