
Abstract
This review presents the overview of construction, working, mathematics, and physics behind a device invented by Bernitsas which is called as VIVACE (vortex induced vibration for aquatic clean energy). Various modifications and investigations were carried out in a device called as a VIVACE (vortex induced vibration for aquatic clean energy) in last two decades since its inception by Bernitsas. This review systematically explains the use of cylindrical suspended bars to exploit von Karman effect for energy harvesting at optimal trade-off between maximum oscillation amplitude and available low velocity of the water flow in ocean. A systematic review is done to understand the physics behind the vortex shedding, basic construction and working of the experimental setup are discussed, and finally, a mathematical model is also given to understand the interrelationship between voltage generated and oscillation amplitude. A brief parametric study also shows the various input parameters those can be optimized to get maximum energy.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The rise of hunger for energy demand is inevitable but the adverse environmental effects of carbon emission by burning of fossils to meet this demand can be avoided. Paris Agreement in 2015 further motivated researchers and investors around the globe to see future in carbon-free renewable energy resources. The rise in worldwide capacity of solar energy and wind energy in last five years also shows that the time when renewable energy will be major source of energy is no more distant. But in this paper, a new type of technique is reviewed that exploits ocean energy in an entirely different way—VIVACE (vortex induced vibration for aquatic clean energy) which is invented by Bernitsas in 2004–05 [1,2,3,4,5]. Before moving to what is VIVACE, let us discuss why do we need VIVACE? The habitat coastal areas have very high real estate property values, and surrounding marine life and environment further make such areas not friendly with other renewable energy options like solar power plant and wind turbines. Many countries have made very strict rules that must be satisfied by the any device that could be installed in these areas. Those are low maintenance, high life, robustness, high energy density, and should not obstruct navigation. There were many other ocean energy harvesting-based devices but all failed to meet the standards required to be installed along the coastal areas like water column, buoy, flap, pendulum [6, 7], turbines, watermills [8, 9], etc.
1.1 Ocean Energy
The ocean is full of different types of energy that can be harnessed to fulfill the ever growing demand of the global energy consumption specially, along the coastal areas where the cost of land and existing flora and fauna are also major concern. For a sustainable energy harvesting, an energy convertor must follow certain criteria as shown in Fig. 1 (Table 1).

Minimum criteria required by an ocean energy convertor for a sustainable energy harvesting
1.2 Vortex-Induced Vibrations
In VIVACE which is a type of an ocean energy convertor, the suspended circular bars or cylinders are fixed on a vertical column via elastic springs of sufficiently high stiffness. The reciprocating motion (up and down) of the cylinders is synchronized and finally converted into the rotary motion via rack and pinion gear system to get electricity through a generator arm. The fundamental understanding of vortex-induced vibrations (VIV) is prerequisite before learning the working of VIVACE. The free and forced vibrations of such fixed rigid structures with single or multiple dof (degrees of freedom) lay the foundation of principle working of VIVACE device. The cylinders oscillate transverse to the velocity of water with weak in-line and strong transverse nonlinear oscillations [10].
The lock-in stage is very important in the vortex-induced vibrations. It is also known as vortex synchronization. At this stage, fform ~ fn,water ~ fcyl or simply the vortex formation and natural frequencies both become almost equal to each other. The unique construction characteristic of the VIVACE device allows the synchronization to happen over a larger range of reduced velocity and at high mass ratio as compared to the other convertors. Where reduced velocity factor \(U^{*} = \frac{U}{{f_{{\text{n, water}}} D}}\) and mass ratio \(m^{*} = \frac{{m_{{{\text{osc}}}} }}{{m_{{\text{d}}} }}\) and \(m_{{\text{d}}} = \frac{\pi }{4}\rho_{{\text{w}}} D^{2} L\) [11,12,13,14].
It can be observed that there are many ways to harness energy from ocean, but it was Bernitas and his team who successfully exploited vortex had induced vibration (VIV) first time for feasible and sustainable energy harvesting through their invented device called VIVACE in year 2004–05. Unlike other ocean energy-based devices, it is safe for marine life. It is based on the VIV. The VIV involves several degrees of freedom, and it is self-induced and self-limiting with several mode of responses. Reynolds number (Re) and damping (C) have unusually very high values, which have limited studies in the literature. There are many parameters whose effect can be investigated as briefly discussed in the following points in Table 2.
In a study by [5], the effect of high damping, high Re, and variable RL (for optimization of the electricity generated) is investigated in a Low-Turbulence Free-Surface Water (LTFSW) channel with all the necessary mathematical.
2 Experimental Model
2.1 LTFSW Channel
The LTFSW channel has many advantages over a towing tank which is used to get flow past a cylinder. It provides unlimited number of oscillations per experiment within acceptable turbulence level. However, in LTFSW, the width of the channel limits the length of the cylinder and turbulence induced by impeller makes it difficult to achieve very low turbulence level. A two-story high water channel recirculates 8000 gallons of treated water via four impeller of diameter 0.787 m connected with 20 hp three-phase electric motor.
2.2 Apparatus
Figure 2 shows the VIVACE cylinder placed transverse to the fluid flow as a spring-mass system with all dimensions, stiffness, and damping in the setup. Initially, three setup VIVACE models were studied, out of which Model-III works in the desired manner. The cylinder in the Model-III is made up of aluminum, and it has diameter D = 125.7 mm, length L = 914.4 mm, aspect ratio L/D = 7.274, and a high blockage ratio D/H = 0.143. There are two cylinders with a gap of 10 mm with the walls of the test section, which are suspended by compression coil springs at the ends, with constrained motion in transverse direction via linear bearings and controlled natural frequency of oscillation fn,water (0.88–1.037 Hz) via changing the active coils.

VIVACE cylinder placed transverse to the fluid flow as a spring-mass system
2.3 Calibration
The velocity measured from the pitot tube placed 30 cm from bottom of the tank and half-width of the tank is calibrated with the velocity of the VIVACE cylinder at six water depths with four impeller frequencies within range of velocity 1.2 m/s (above this value, there was non-uniformity in the correlation) for 30 s of time period, and a correlation is developed as given by:
The input from transducer and generator is fed into the data acquisition system. The amplitude and range of synchronization are significantly reduced as cylinder is placed closer to the free surface.
3 Mathematical Modeling
Equation of motion for the VIVACE cylinder,
Fluid power in VIVACE
Mechanical power in VIVACE,
Upper limit to the efficiency of the VIVACE converter (based on the experimental data):
where power in fluid is given by 1/2ρU3DL; the efficiency of the VIVACE device is given by:
Generator Model
Torque generated in the generator is given by (Fig. 3):

An equivalent electric circuit diagram of a VIVACE device
The voltage generator by field induced by the VIV is given by:
Transmission Model
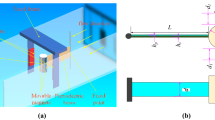
The periodic reciprocating (up and down) motion of the cylinder is converted into the periodic rotational oscillatory motion of the shaft of the generator with the help of a rack and pinion gear system, which is shown in Fig. 4. When the gear effect is considered, the expression for the voltage-induced can be written as:

A schematic diagram showing all the components of a VIVACE device [5]
Combined Model
Here, all the components of the VIV and energy generation via transmission systems are combined together to get an overall view of the interlinking of the individual system. Due to inertia of the movement of the generator, gear-2 exerts force on the suspended cylinder. There are frictional losses in the gear system as well as damping in the generator due to electric wiring. Both can be managed by the LR(load resistor). All kinds of the damping can be put together to get an interrelationship via following equation:
Analytical estimation of Ctotal is not possible, and hence, it is measured experimentally; there are four sources as summarized in Table 3.
The cylinder is initially displaced to undergo damped up and down movements with yn and y(n+1) as any two consecutive peaks that are given as:
where \(T_{{\text{d}}} = \frac{2\pi }{{\omega_{{\text{d}}} }}\) and damping ratio \(= \frac{1}{2\pi }\ln \frac{{y_{n} }}{{y_{n + 1} }}\).
The open voltage across the generator is given by:
The power harnessed by the load resistor RL:
4 Measurements and Data Analysis
In the measurement and data analysis of the VIV phenomenon, cylinder vertical displacement, water velocity, voltage generation at RL, and the harnessed power are few important output parameters and those should be recorded during the experimental run. A rigorous evaluation of design, fabrication, and compatibility of various parts must be done via damping tests so that all parts of the VIVACE work properly at minimum friction. The role of free surface and bottom effects should be studied. Fourier spectral analysis is not applicable here; VIV time series are of nonlinear, non-stationary nature. So, Hilbert-Huang Transform (HHT) is used to analyze the resulted time series over large range of velocities and load resistor Rload. In the experimental runs, generated voltage and harnessed power can be studied at different velocities and Rload. Subsequently, ηpeak, ηVIVACE, and ηUL-VIVACE can be calculated for the overall rating of the VIVACE device.
A basic parametric analysis to see the effect of various parameters is recorded in terms of dimensionless amplitude of VIV, power output, various efficiencies, etc. which suggests many important interrelationships are obtained that are summarized in the Table 4.
5 Conclusions and Future Scopes
Vortex-induced vibrations (VIV) have been studied and exploited for low damping only, and it is the first time that an ocean energy convertor has been devised to harness electricity with VIV under high damping. The vortex shedding phenomenon is mainly studied in low Reynolds number but in real ocean current flows at high Re. At higher Re, the amplitude of VIV increases which supports higher voltage generation. This review paper is aimed to put together the fundamentals of VIVACE device via hydrodynamic and mathematical models. The ocean energy convertors like turbines and watermills are unable to work at low water flow speeds, while VIVACE has ability to harness energy even in such low velocities at reasonably high efficiencies. In the future scope, the effect of high damping and high Re on wake characteristics and energy harvesting can be investigated. The optimum value of cylinder diameter and spring stiffness at given mass ratio can predicted to get a economic VIVACE device.
References
Bernitsas MM, Raghavan K (2004) Converter of current/tide/wave energy, provisional patent application, US Patent and Trademark Office Serial No. 60/628,252
Bernitsas MM, Raghavan K (2005) Supplement to the U.S. provisional patent application titled, converter of current, tide, or wave energy, University of Michigan Ref. No. 2973
Bernitsas MM, Raghavan K (2005) Fluid motion energy converter, U.S. Patent Application, United States Patent and Trademark Office, Serial No. 11/272,504
Bernitsas MM, Raghavan K (2005) Fluid motion energy converter, international provisional patent application, USA Patent and Trademark Office
Bernitsas MM, Ben-Simon Y, Raghavan K, Garcia EMH (2006) The VIVACE converter: model tests at high damping and reynolds number around 105. In: 25th international OMAE conference
Ogata K (2004) System dynamics, 4th edn. Prentice Hall, New Jersey
Szepessy S (1993) On the control of circular, cylinder flow by end plates. Euro J Mech B Fluids 12:217–244
Chen SS (1987) Flow-induced vibration of circular cylinder structures. Hemisphere Publishing Corporation, Springer, Washington
Khalak A, Williamson CHK (1999) Motions, forces and mode transitions in vortex-induced vibrations at low mass-damping. J Fluids Struct 13:813–851
Govardhan R, Williamson CHK (2000) Modes of vortex formation and frequency response of a freely vibrating cylinder. J Fluid Mech 420:85–130
Rood EP (1995) Free surface vorticity (Chap. 17). In: Green S (ed) Free-surface vorticity. Kluwer
Sarpkaya T (2000) A critical review of the intrinsic nature of vortex induced vibrations. J Fluids Struct 19(4):389–447
Walker DT, Lyzenga DR, Ericson EA, Lund DE (1996) Radar backscatter and surface roughness measurements for stationary breaking waves. Proc Roy Soc Lond A 452:1953–1984
Huang NE, Shen Z, Long SR, Wu MC, Shih HH, Zheng Q, Yen NC, Tung CC, Liu HH (1998) The empirical mode decomposition and the Hilbert spectrum for nonlinear and nonstationary time series analysis. Proc Roy Soc Lond A 454:903–995
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Chhaparwal, G.K., Dayal, R. (2023). Vortex-Induced Vibrations for Energy Harvesting: A Review. In: Sharma, D., Roy, S. (eds) Emerging Trends in Energy Conversion and Thermo-Fluid Systems. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-3410-0_22
Download citation
DOI: https://doi.org/10.1007/978-981-19-3410-0_22
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-3409-4
Online ISBN: 978-981-19-3410-0
eBook Packages: EngineeringEngineering (R0)