
Abstract
Due to the advancement of wind turbine industry technologies, the variable-speed wind turbine (WT) coupled with a doubly fed induction generator (DFIG) has attracted considerable interest due to its several potential advantages over other wind turbine concepts. To contribute to this fast-growing development, different wind systems control strategies are looking to become more intelligent to operate the WT around its optimum operation with high security and reliability. Practically, the WT’s efficiency can be achieved by extracting the maximum possible amount of power from the wind. In this context, we are particularly interested in this work to implement an intelligent control of a variable speed wind turbine based on a DFIG using the intelligent artificial techniques, by combining an artificial neural network Maximum Power Point Tracking (ANN-MPPT) and intelligent Indirect vector control by stator field alignment (ANN-IFOC). The ANN-MPPT strategy aims to extract a maximum of power from the wind to operate the WT around its optimum operation independently of the system parameters, the aerodynamic characteristics, and the wind speed measurement. While the intelligent IFOC uses ANN-controllers to optimize the generator’s active and reactive powers. The efficiency of the presented control system topology is confirmed by the simulation results acquired using Matlab/Simulink software; the obtained results are satisfactory and confirm the ability of the suggested approach to maintaining the system operating at the desired response.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Wind energy
- Doubly fed induction generator DFIG
- Maximum power point tracking (MPPT)
- Indirect field oriented control (IFOC)
- Artificial neural network (ANN)
1 Introduction
The Wind Energy Conversion Systems play an important role as an alternative solution for energy generation due to many motivations, such as the absence of greenhouse gas pollution, the unlimited availability of driving sources, and the absence of hazardous waste [1].
Under trends of using wind energy sources, different control strategies for wind power systems are seeking to become more efficient and more intelligent in order to meet the future electricity demands and the huge distribution of it. The WT’s efficiency can be increased by capturing the maximum available power from the wind and operating the WT at its optimum operation under rapidly varying environmental conditions, by implementing advanced control strategies [1, 2].
In this context, many Maximum Power Point Tracking (MPPT) approaches have been proposed and applied, such as Hill Climb Search (HCS), perturbation and observation (P&O), incremental conductance (IncCond) [2, 3]. In recent years, MPPT seeks to be more powerful in order to overcome the many limitations of traditional MPPT, such as the inaccurate wind speed measurement, the degradation of the aerodynamic properties of the aeroturbine with time, and the variation of the climatic properties from one site to another.
Artificial intelligence techniques have demonstrated new solutions in industrial processes due to their many benefits compared to conventional computational systems, and especially, they have become a perfect solution for highly sensitive control mechanisms and non-linear models, due to their ability to provide highly accurate and faster responses [4, 5].
The current work presented in this paper intends to implement a proposed Maximum Power Point Tracking (MPPT) approach based on artificial intelligent techniques (Artificial Neural Network (ANN)) accompanied by an intelligent Indirect field oriented control (ANNIFOC) to optimize the energy generated from a DFIG coupled with a variable speed wind turbine and connected to the grid.
The ANN-MPPT strategy aims to capture maximum power under varying wind speeds, independently of the system parameters, the aerodynamic characteristics, and the wind speed measurement. While the intelligent IFOC aims to control the generator’s active and reactive powers and avoid any disruption caused by characteristic uncertainty, which can affect the quality of the supplied energy.
This work is presented as follows: Sect. 2 describes the model of our wind turbine energy system and the conventional MPPT strategy. The suggested ANN-MPPT is explained in Sect. 3. Section 4 includes the mathematical model of DFIG in the d-q reference frame and the ANN-IFOC strategy. While Sect. 5 is reserved for the presentation of simulation results obtained using Matlab/Simulink, to prove the effectiveness of the proposed control strategy to ensure the system’s optimal operation. Finally, some conclusions are summarized in Sect. 6.
2 Modeling of the Wind Turbine and the MPPT Strategy
2.1 Modeling of the Wind Turbine
The mechanical power extracted from the wind can be represented as follows [6]:
where, ρ is the air density, S is the turbine swept area, and v denotes the wind speed (m/s).
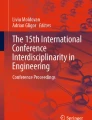
The power coefficient \(C_{P} \left( {\uplambda ,\upbeta } \right)\) (Fig. 1) measures the turbine’s aerodynamic efficiency; which is affected by the size of the blade, the angle of the blade’s orientation (β) and the speed ratio (λ) [7]:

Power coefficient \(C_{p} \left( {\uplambda ,\upbeta } \right)\)
where:
The wind exerts a mechanical torque on the turbine shaft, which can be expressed by the following equation:
where: \(C_{c} = \frac{{C_{p} }}{\uplambda };\,\Omega_{t} = \frac{{\Omega_{m} }}{G};\,C_{g} = \frac{{C_{t} }}{G}\).
The turbine and mechanical rated speeds are denoted respectively by \(\Omega_{t}\) and \(\Omega_{m}\), while G denotes the Gearbox ratio.
2.2 The Maximum Power Point Tracking Strategy (MPPT)
The optimum operation of the WT is achieved by running the turbine at the maximum aerodynamic power coefficient (\({\varvec{C}}_{{{\varvec{p}},{\varvec{max}}}}\)), which corresponds to an optimum value of λ and (\(\uplambda _{opt}\), \(\beta_{opt}\)), while λ is adjusted to its optimal value by controlling indirectly the rotor speed.
According to (2), (3), and Fig. 1, the desired value of \(C_{p\_max} = 0.48\) of our system is reached for \(\uplambda _{opt} = 8.1\), and \({\upbeta } = 0\).
By combining (4), (5), and (6) we obtain the expression of \({\mathbf{C}}_{{{\mathbf{em}}\_{\mathbf{ref}}}}\) and \({\varvec{P}}_{{{\varvec{aero}}\_{\varvec{max}}}}\):
Generally, we can distinguish two main modes of MPPT [2–8]:
With Mechanical Velocity Regulation. This method requires wind speed measurement using an anemometer or an array of anemometers and using PI regulators, which increases the cost of the system. On the other hand, in practice, an accurate wind speed measurement is difficult to reach, and an imprecise measurement necessarily reduces the system’s reliability and degrades the extracted power. For these reasons, most of the WT systems are currently controlled without mechanical velocity regulation.
Without Mechanical Velocity Regulation. For this second control structure, it is assumed that the wind speed variations are very low in steady state compared to the wind system’s electrical time constants, which implies that the turbine’s acceleration torque can be neglected.
In our study, we have adopted the second mode of MPPT (Fig. 2).

Block diagram of the wind turbine system with MPPT
3 Maximum Power Extraction by Artificial Neural Networks ANN-MPPT
The ANN algorithms are inspired by the biological processes of the human brain. His goal is to accomplish specified activities or functions based on a collection of connected artificial neurons. The NNs take in data and train themselves to be able to anticipate the outputs of a new set of similar types of data.
The following equations represent the expression of the output yk of a neuron k [9]:
The ANNs are constructed from a number of layers (input layer, output layer, and hidden layers). The neurons in the layers are connected by channels, and each of these channels is assigned a value called a weight (\(W_{ki}\)), which is adjusted during the training phase using a learning algorithm. The inputs (\(x_{i}\)) are multiplied to the corresponding weights and summed with the bias (b) to generate output after passing through a threshold function called the activation function (f).
In our case, the training set (the input and target), used for forming the ANN for MPPT [8], is obtained from the conventional MPPT provided in Sect. 2 (Fig. 2) using Matlab/Simulink. The net is implemented to determine the optimal electromagnetic torque that requires the turbine to operate at its optimum operation whatever the wind speed.
Figure 3 shows the regression curves for the ANN, which provide highly significant information about the performance of the ANN training, validation, and testing, based on the value of R and the distribution of the data along the adjustment line (Fit). For our ANN, we show that R is equal to 1, which indicates that the ANN has successfully trained up to 100%, and we also observe that all data points are aligned with the Fit line, confirming that the ANN has precisely comprehended the relationship between the input and output data.

Regression curves for ANN-MPPT
The ANN controller’s performance is assured by selecting the optimum number of neurons and hidden layers through a series of tests. In our case, we reached the best architecture by using one hidden layer containing 10 neurons.
4 Modeling and Intelligent Field Oriented Control of the DFIG
The configuration of DFIG can be presented in d-q reference by the following equations [10]:
-
Stator and rotor voltages
$$\left\{ {\begin{gathered} {V_{sd} = {\text{R}}_{{\text{s}}} {\text{I}}_{{{\text{sd}}}} + \frac{{\text{d}}}{{{\text{dt}}}}\emptyset_{{{\text{sd}}}} -\upomega _{{\text{s}}} \emptyset_{{{\text{sd}}}} } \hfill \\ {V_{sq} = {\text{R}}_{{\text{s}}} {\text{I}}_{{{\text{sq}}}} + \frac{{\text{d}}}{{{\text{dt}}}}\emptyset_{{{\text{sq}}}} +\upomega _{{\text{s}}} \emptyset_{{{\text{sq}}}} } \hfill \\ {V_{rd} = {\text{R}}_{{\text{r}}} {\text{I}}_{{{\text{rd}}}} + \frac{{\text{d}}}{{{\text{dt}}}}\emptyset_{{{\text{rd}}}} - (\upomega _{{\text{s}}} -\upomega _{{\text{r}}} )\emptyset_{{{\text{rd}}}} } \hfill \\ {V_{rq} = {\text{R}}_{{\text{r}}} {\text{I}}_{{{\text{rq}}}} + \frac{{\text{d}}}{{{\text{dt}}}}\emptyset_{{{\text{rq}}}} + (\upomega _{{\text{s}}} -\upomega _{{\text{r}}} )\emptyset_{{{\text{rq}}}} } \hfill \\ \end{gathered} } \right.$$(11) -
Stator and rotor flux
$$\left\{ {\begin{gathered} {\emptyset_{{{\text{sd}}}} = {\text{L}}_{{\text{s}}} {\text{I}}_{{{\text{sd}}}} + {\text{L}}_{{\text{m}}} {\text{I}}_{{{\text{rd}}}} } \hfill \\ {\emptyset_{{{\text{sq}}}} = {\text{L}}_{{\text{s}}} {\text{I}}_{{{\text{sq}}}} + {\text{L}}_{{\text{m}}} {\text{I}}_{{{\text{rq}}}} } \hfill \\ {\emptyset_{{{\text{rd}}}} = {\text{L}}_{{\text{r}}} {\text{I}}_{{{\text{rd}}}} + {\text{L}}_{{\text{m}}} {\text{I}}_{{{\text{sd}}}} } \hfill \\ {\emptyset_{{{\text{rq}}}} = {\text{L}}_{{\text{r}}} {\text{I}}_{{{\text{rq}}}} + {\text{L}}_{{\text{m}}} {\text{I}}_{{{\text{sq}}}} } \hfill \\ \end{gathered} } \right.$$(12) -
Electromagnetic torque
$${\text{T}}_{{{\text{em}}}} = \frac{{{\text{L}}_{{\text{m}}} \,{\text{p}}}}{{{\text{L}}_{\text{s}} }}\left( {\emptyset_{{{\text{sd}}}} {\text{I}}_{{{\text{rq}}}} + \emptyset_{{{\text{sq}}}} {\text{I}}_{{{\text{rd}}}} } \right)$$(13) -
The active and reactive stator powers
$$\left\{ {\begin{gathered} {{\text{P}}_{{\text{s}}} = V_{sd} {\text{I}}_{{{\text{sd}}}} + {\text{V}}_{{{\text{sq}}}} {\text{I}}_{{{\text{sq}}}} } \hfill \\ {{\text{Q}}_{{\text{s}}} = V_{sq} {\text{I}}_{{{\text{sd}}}} - {\text{V}}_{{{\text{sd}}}} {\text{I}}_{{{\text{sq}}}} } \hfill \\ \end{gathered} } \right.$$(14)
To control the electrical power generated by DFIG, we will control the exchange of the active and reactive power between the DFIG stator and the grid, based on indirect vector control, by aligning the stator flux with the d-axis (Fig. 4), accounting for the coupling terms, and compensating for them with a two-loop system [4].

Orientation of the stator flux of the DFIG
We have: \(\emptyset_{{{\text{sd}}}}\) = \(\emptyset_{{\text{s}}}\), \(\emptyset_{{{\text{sq}}}}\) = 0, and \(\frac{{\text{d}}}{{{\text{dt}}}}\emptyset_{{{\text{sd}}}} = 0\).
The voltage equations of DFIG can be simplified as:
With: \(\upsigma = 1 - \frac{{{\text{L}}_{{\text{m}}}^{2} }}{{{\text{L}}_{{\text{s}}} {\text{L}}_{{\text{r}}} }}\).
By replacing (12) and (15) in (14) the generator’s active and reactive powers can express by:
By establishing the indirect vector strategy, the global block diagram of the controlled system using ANN-PI can be established as shown in Fig. 5 [4].

Global block diagram of ANN-indirect field-oriented control technique
For ANN-PI, we acquired the appropriate structure by taking one hidden layer with 7 neurons, and specifying the Levenberg–Marquardt (LM) algorithm as the backpropagation algorithm to train the networks.
5 Simulation Results and Interpretation
To model our system and simulate the results of the control presented in this paper, we used MATLAB/Simulink software (Fig. 6). The system operates in a closed loop, where the ANN-MPPT control block provides the reference power to the IFOC loop for a DFIG of 10 kW.

Global block diagram of the proposed control
The results shown in Fig. 7 are related to the ANN-MPPT strategy, which shows that the proposed MPPT required the system to maintain the power coefficient around its maximum value Cpmax = 0.48 (Fig. 7b). Moreover, the extracted mechanical power (Fig. 7c) and the turbine rotational speeds (Fig. 7d) track their optimal values to extract maximum power from the wind throughout the simulation time, and whatever the wind speed (Fig. 7a). Whereas the results of the intelligent IFOC illustrated in Fig. 8 indicate that the generator’s active and reactive powers track perfectly their optimal values, and the ANN controllers react rapidly to track the fast fluctuations of the DFIG power, which demonstrates the efficiency of the suggested control to maintain the WT system working at its optimum operation with accuracy and fast response.

Simulation results of the ANN-MPPT

Active and reactive power of the DFIG using ANN-IFOC
6 Conclusions
In this paper, an ANN MPPT regulator has been presented for maximizing the produced energy of a wind turbine system. The advantages of this strategy are that it is independent of the system characteristics and the wind speed measurement. This proposed MPPT was tested on a wind turbine based on a DFIG generator, which is controlled by an intelligent indirect vector control to track the optimal power point.
The obtained results confirm that the proposed strategy optimizes the wind energy conversion system’s efficiency by maintaining it operating at the desired response.
References
Kumar, Y., Ringenberg, J., Depuru, S.S., Devabhaktuni, V.K., Lee, J.W., Nikolaidis, E., Andersen, B., Afjeh, A.: Wind energy: trends and enabling technologies. Renew. Sustain. Energy Rev. 53, 209–224 (2016). ISSN 1364-0321. https://doi.org/10.1016/j.rser.2015.07.200
Mousa, H.H.H., Youssef, A.-R., Mohamed, E.E.M.: State of the art perturb and observe MPPT algorithms based wind energy conversion systems: a technology review. Int. J. Electr. Power Energy Syst. 126(Part A), 106598 (2021). ISSN 0142-0615. https://doi.org/10.1016/j.ijepes.2020.106598
Musunuri, S., Ginn, H.L.: Comprehensive review of wind energy maximum power extraction algorithms. In: IEEE Power and Energy Society General Meeting, pp. 1–8 (2011). https://doi.org/10.1109/PES.2011.6039023
Djeriri, Y., Meroufel, A., Allam, M.: Artificial neural network-based robust tracking control for doubly fed induction generator used in wind energy conversion systems. J. Adv. Res. Sci. Technol. (2015). ISSN: 2352-9989
Aamir, M.: On replacing PID controller with ANN controller for DC motor position control. Int. J. Res. Stud. Comput. 2, 21–29 (2013). https://doi.org/10.5861/ijrsc.2013.236
Tahir, K., Belfedal, C., Allaoui, T., Doumi, M.: Proposal of a new hybrid control strategy for dynamic performance improvement of wound field synchronous generator-based wind turbines. J. Renew. Sustain. Energy 7, 043113 (2015). https://doi.org/10.1063/1.4926768
Djeriri, Y.: Lyapunov-based robust power controllers for a doubly fed induction generator. IJEEE 16(4), 551–558 (2020). https://doi.org/10.22068/IJEEE.16.4.551
Samir, L., Said, G., Mustapha, D., Youcef, S.: A neural MPPT approach for a wind turbine. In: 6th International Conference on Systems and Control (ICSC), pp. 210–214. IEEE, Batna, Algeria (2017). https://doi.org/10.1109/ICoSC.2017.7958689
Nour Ali, M.: Improved design of artificial neural network for MPPT of grid-connected PV systems. In: 2018 Twentieth International Middle East Power Systems Conference (MEPCON), pp. 97–102. IEEE, Cairo, Egypt (2018). https://doi.org/10.1109/MEPCON.2018.8635202
Allam, M., Dehiba, B., Abid, M., Djeriri, Y.: Etude comparative entre la commande vectorielle directe et indirecte de la Machine Asynchrone à Double Alimentation (MADA) dédiée à une application éolienne 13 (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bouzem, A., Bendaou, O., Samoudi, B. (2022). An Intelligent Control of a Variable Speed Wind Turbine Based on DFIG for Maximum Power Capture. In: Bendaoud, M., Wolfgang, B., El Fathi, A. (eds) The Proceedings of the International Conference on Electrical Systems & Automation. ICESA 2021. Springer, Singapore. https://doi.org/10.1007/978-981-19-0035-8_9
Download citation
DOI: https://doi.org/10.1007/978-981-19-0035-8_9
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-0034-1
Online ISBN: 978-981-19-0035-8
eBook Packages: EnergyEnergy (R0)