
Abstract
The research paper presents the comparative analysis of MATLAB model of a regulating transformer (RT). Two MATLAB models are built for analysis. Each model contains two type of blocks of regulating transformer. One block is phasor type, and the other is detailed type Simulink block. Difference between both types of blocks used and integrated in both models are explained in the research paper. On-load tap changers are used for voltage regulation by altering the turn ratio of the transformer after connecting a tapped winding on each phase. In first model, model 1 is detailed type integrated with model 2 which is phasor type. In second model, both model 1 and model 2 are phasor type. Both models are connected in parallel with each other through a distribution network rated 25 kV. Therefore, Simulink models are developed two times with different types of regulating transformer blocks. The results are obtained after simulation of both Simulink MATLAB models, and four traces of tap positions, superposition of voltage, active power, and reactive power are observed to analyze the impact of voltage regulation because of the tap change regulating transformer. The research paper also focuses on observing and comparing the speed of simulation when we switch from first model to second model of distribution network connected with regulating transformers.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Regulating transformer (RT)
- On-load tap changers (OLTC)
- Phasor type model
- Detailed type model
- Distribution network
- Voltage regulation
- MATLAB Simulink
1 Introduction
In today’s world, stabilization of voltage in distribution network is a major concern specifically during loading conditions. Non-stable voltage conditions may lead to frequent faults, wear, and tear of equipment and devices. To overcome this shortcoming, voltage regulation is performed by the transformer using various methods. One of the method for regulating the voltage is by using tap-change regulating transformer during on-load conditions. Using thyristor for auxiliary switch solved the problem of arcing during tap changing. Recently, based on the concept of bidirectional thyristor, solid-state relays are used because of their non-contact feature while tap changing [1]. It enables the voltage regulation even during the voltage sag or swell associated with the distribution network of the microgrid [2]. The regulating transformer consists of two units, i.e., series and parallel units. The parallel units are given input by series units so as to have an injection of voltage into distribution transmission system [3]. Strict regulation of voltage is necessary because of the attached sensitive electronics. A properly regulated voltage permits for higher voltage drop in output of distribution network and can enhance the reduction of weights of cables connecting the network. It can be achieved by using (R-TRU) regulated transformer rectifier units [4]. High efficiency and improved power density is can also be achieved by partial energy regulation but adding the auxiliary transformer in isolated topology is not preferential as it do not give any advantage while improving power density [5]. It is also observed that polarity of any associated CT is should be reversed manually because the voltage regulation is severely influenced by protection calculation logic [6].
In first model, the detailed type model 1 represents the tap changing switches and characteristics of the transformer, while the phasor type model 2 uses current source for simulation. Model 1 is can be simulated in continuous or discrete mode of simulation, but model 2 is can be simulated in phasor mode of powergui only. This makes the model 2 much faster in simulation speed as compared to model 1. Model 2 is preferable to be used for studies of transient stability. Changes in phasor voltage and current can be observed using model 1. So in order to make system much faster, model 1 of first model is deleted and replaced by the model 2. After replacement, we receive a whole new different second model which makes the simulation of the model, even much faster.
2 Literature Review
Voltage regulation is very important to maintain stability of the buses of distribution network as frequent unregulated changes may lead to severe faults. The voltage regulation is given by Eqs. (1) and (2) as shown.
The efficiency of the voltage regulation is 71% which very low and undesired by the customers. The impedance magnitude is related to R by the coefficient α, i.e., α = X/R.
For real solution of N, 0 < α < 0.5 corresponding to N positive solutions by 1 < N < \(\sqrt{2}\). So, maximum regulation is possible if the regulation transformer ratio is maximum with value of 1.414. Also, to compensate the losses, capacitor bank is also used as static compensator connected in parallel with the load [7]. The regulating capacity is enhanced by using new product, i.e., capacity regulating transformer during on-load conditions as is energy saving a specifically used by industrial entities and mining enterprises or at the places where there is a variation in seasonal load [8]. Different operating conditions are studied to understand the changing nature of power network by modeling of transformers. The types of regulating transformers include phase shifting (PST) and under-load tap changing (ULTC) transformer as they regulate the voltage without interfering with the load [9]. The structure of a UHV transformer is highly complex as compared to EHV transformers because of the complex interaction between the parts of transformer leading to complex differential current affecting the working of the differential relay [10]. With the developing economies, the demand of distribution transformers are increasing heavily as they are important equipment in distribution network [11]. So it is very important to build smart, intelligent, and practical strategies to develop the new types of transformer for different new applications with proper safety and speed of operation [12]. The mechanical contacts lead to shocks while connection and arcing during disconnection. The capacitor banks generates more loss due to fluctuations and deviation in voltage [13]. Strong internal resonances are produced due to the regulating winding while choosing the tap position leading to a building up of high resonant voltage in regulating winding thus leading to initiation of ground faults in feeding cable [14]. During fixed tap position, less on-state resistance is provided by mechanical contacts leading to less power loss; however, wear-less commutation is provided by the semiconductor devices while performing the tap change [15]. The generated arc during switching of the mechanical taps increases with increase in the capacity and load current of the regulating transformer. This leads to vaporization and decomposition of insulating oil to generate gas leading to a surge in insulating oil which is not a favorable circumstance under current required conditions [16]. These limitations should be overcome while using tap-change regulating transformer in near future by using IEEE draft standards for general requirements and test code for regulating transformers [17,18,19,20,21,22].
3 Simulation Model
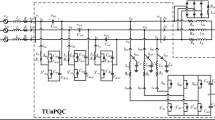
Two MATLAB Simulink models are developed each containing model 1 and model 2, with the help of Gilbert Sybille (Hydro-Quebec) model. Both model 1, 2, and 3-Φ regulating transformer with rating 47 MVA, 120 kV/25 kV Wye/Delta. The first case of model containing model 1 and model 2 is shown in Fig. 1.

Detailed-Phasor model of regulating transformer (First case of model)
The tap changer is connected in the HV side, i.e., 120 kV side, and transformer regulates the voltage associated with the buses B2 and B4 at 25 kV side. Tap changer has nine switches from zero to eight. Tap zero is nominal position initially with 120 kV/25 kV ratio, and there are total eight different positions for changing the tap from one to eight number. To have positive/additive or negative/subtractive position of tap, reversing switch is added with the regulation winding to allow reverse connections. The voltage correction is possible for ±0.01875 p.u. of 25 kV at secondary side voltage or ±1.875% of 120 kV of nominal voltage. Hence, range of voltage variation allowed is 102–138 kV or 0.85–1.15 p.u. by tap change of 2.25 kV or 0.01875 p.u. per step. Voltage regulators receive input from buses B2 and B4 in the form of positive sequence voltage with reference voltage at 1.04 p.u. The factor by which transformers boost the voltage with initial position of tap set at −4 is 1.081. Depending upon the need of voltage regulation, the ‘Up’ or ‘Down’ outputs are generated by pulses using the tap changer to move the tap in upward or downward direction for effective voltage regulation. The range of voltage is should be (1.021 < V < 1.059) p.u. at buses B2 and B4 until the tap position does not reach +8 or −8 position. So the permissible error range is 0.01875 p.u. The second case of model containing model 1 and model 2 is shown in Fig. 2.

Phasor-Phasor model of regulating transformer (Second case of model)
4 Results and Discussion
The changing of tap is a quite slow process as it is a mechanical process. It almost takes four seconds to change the tap position. The simulation time is set to 120 s (2 min). At starting, the nominal voltage is being generated by the source, and programmable voltage source is implemented to change the voltage of the system to see the effect on the performance of the tap changer during loading condition of 120 kV system. Later, the voltage is decreased and increased progressively to 0.95 p.u. at time t = 10 s and 1.10 at time t = 50 s. Various curves/traces were observed and plotted as can be seen in the results above. Figures 3 and 4. display the position of tap of the tap changers during entire simulation of 120 s. Figures 5 and 6 display the positive sequence voltage superposition at bus B1 (120 kV), bus B2 (2 kV), and bus B4. Figures 7 and 8 display the reactive power, while Figs. 9 and 10 display the active powers of buses B1 and B3 on 120 kV voltage side. A total of 15 MVAR capacitor banks are used for voltage compensation. The voltage regulator regulated the voltage successfully using the tap changers during loading conditions.

Tap positions (first model) versus time

Tap positions (second model) versus time

Voltage variation at B1, B2, and B4 (first model) versus time

Voltage variation at B1, B2, and B4 (second model) versus time

Reactive power at B1 and B3 (first model) versus time

Reactive power at B1 and B3 (second model) versus time

Active power at B1 and B3 (first model) versus time

Active power at B1 and B3 (second model) versus time
5 Conclusion and Future Scope
In this paper, two models of distribution network are built among each of which, two regulating transformers are integrated through parallel connection using MATLAB Simulink blocks. After achieving the desired results and analyzing them, it was observed that second model with phasor-phasor type integrated model runs two and half times faster as compared to detailed-phasor type integrated model connected parallel to the distribution system. Algebraic loops are broken by using first-order transfer function due to which some glitches are observed in voltage during step down at time t = 10 s and during step up at time t = 50 s which are can be ignored. The tap positions of the tap changer are varied to stabilize the voltage at the buses in the permissible limit of voltage range in p.u. (1.021 < V < 1.059). When the internal voltage of the source decreases or increases, tap positions are varied in lower or upward direction to attain stability of voltage at the buses. Hence, voltage is regulated by regulating transformer at the different buses using on-load tap changer, and finally, the system stabilizes at voltage at 1.043 p.u. achieved at tap position +1. In future, on-load tap change phase-shifting transformer is can be built using phasor-phasor and detailed-phasor type MATLAB Simulink model.
References
Yulin Z, Shoutian D, Jiahui L, Xin Y, Na Z, Xueli L (2006) Study on non-contact automatic on-load voltage regulating distributing transformer based on solid state relay. In: CES/IEEE 5th international power electronics and motion control conference, pp 1–5. https://doi.org/10.1109/IPEMC.2006.4778031
Pimenta A, Costa PBC, Paraíso GM, Pinto SF, Silva JF (2020) Active voltage regulation transformer for AC microgrids. In: 2020 IEEE 9th international power electronics and motion control conference (IPEMC2020-ECCE Asia), pp 2012–2017
Hu L (1998) A new model for HVDC systems based on model of a regulating transformer. In: 1998 seventh international conference on power electronics and variable speed drives (IEE Conf Publ No 456), pp 105–110. https://doi.org/10.1049/cp:19980508
Wambsganss WJ (2020) Regulating transformer rectifier unit (R-TRU) for more electric aircraft (MEA). In: 2020 IEEE applied power electronics conference and exposition (APEC), pp 1673–1678. https://doi.org/10.1109/APEC39645.2020.9124007
Liu T, Han Y, Wu X, Yang S, Xie G (2018) A MHz regulated DC transformer with wide voltage range. In: 2018 IEEE international power electronics and application conference and exposition (PEAC), pp 1–4. https://doi.org/10.1109/PEAC.2018.8590494
Xiaowei F, Zhendong L, Xun W, Jinbo L, Xiaofei Z, Liming Y (2018) Method for debugging the polarity of the mutual inductor for 1000 kV EHV regulating and compensating transformer. In: 2018 2nd IEEE conference on energy internet and energy system integration (EI2), pp 1–4. https://doi.org/10.1109/EI2.2018.8582034
Swift GW, Menzies RW, Gole AM (1991) Sensitivity analysis for a regulating transformer connected to a high impedance source. IEEE Trans Circ Syst 38(2):227–229. https://doi.org/10.1109/31.68303
Weibin L, Weibo F, Shengfeng L, Rongbo P, Meiyun L, Changjiang L (2015) Fault oriented safety technology of on-load capacity regulating transformer. In: 2015 8th international conference on intelligent computation technology and automation (ICICTA), pp 423–425. https://doi.org/10.1109/ICICTA.2015.112
Murad MAA, Gómez FJ, Vanfretti L (2015) Equation-based modeling of three-winding and regulating transformers using Modelica. In: 2015 IEEE Eindhoven PowerTech, pp 1–6
Zheng T, Chen PL, Qi Z, Terzija V (2014) A novel algorithm to avoid the maloperation of UHV voltage-regulating transformers. IEEE Trans Power Deliv 29(5):2146–2153. https://doi.org/10.1109/TPWRD.2014.2301452
Wang J, Sheng W, Wang L, Yang H (2014) Study on technical and economical efficiency of amorphous alloy transformer and on-load capacity regulating transformer in distribution network application. In: 2014 China international conference on electricity distribution (CICED), pp 30–34. https://doi.org/10.1109/CICED.2014.6991657
Jianjun L, Jinlei H, Xiaoping L, Jingtao Y, Zhongyu Z, Shulin L (2015) Control strategy study and discussion of on-load capacity regulating transformer. In: 2015 8th international conference on intelligent computation technology and automation, pp 337–340
Klimash VS, Tabarov BD (2018) The method and structure of switching on and off, and regulating the voltage of a transformer substation. In: 2018 international multi-conference on industrial engineering and modern technologies (FarEastCon), pp 1–4
Gustavsen B, Portillo A, Ronchi R, Mjelve A (2018) High-frequency resonant overvoltages in transformer regulating winding caused by ground fault initiation on feeding cable. IEEE Trans Power Deliv 33(2):699–708
Rogers DJ, Green TC (2013) An active-shunt diverter for on-load tap changers. IEEE Trans Power Deliv 28(2):649–657
Si J, Hao Z, Zhang Y, Yao S, Ding G, Wu X (2019) Mathematical modeling and simulation of flow field of switching process of on-load tap changer for large capacity transformer. In: 2019 IEEE 8th international conference on advanced power system automation and protection (APAP), pp 1427–1431. https://doi.org/10.1109/APAP47170.2019.9225051
Singh M, Ansari MA, Tripathi P, Wadhwani A (2018) VSC-HVDC transmission system and its dynamic stability analysis. In: International conference on computational and characterization techniques in engineering & sciences (CCTES), pp 177–182. https://doi.org/10.1109/CCTES.2018.8674095
Singh M, Singh O, Kumar A (2019) Renewable energy sources integration in micro-grid including load patterns. In: 3rd international conference on recent developments in control, automation & power engineering (RDCAPE), pp 88–93. https://doi.org/10.1109/RDCAPE47089.2019.8979036
IEEE draft standard for general requirements for liquid-immersed distribution, power, and regulating transformers, pp 1–70, 23 Mar 2021. IEEE PC57.12.00/D1.0
IEEE draft standard test code for liquid-immersed distribution, power, and regulating transformers, pp 1–115, 23 Mar 2021. IEEE PC57.12.90/D4
IEEE draft standard test code for liquid-immersed distribution, power, and regulating transformers, pp 1–118, 14 Jun 2021. IEEE PC57.12.90/D5
Singh O, Singh M (2020) A comparative analysis of economic load dispatch problem using soft computing techniques. Int J Softw Sci Comput Intell IGI Global 12(2). ISSN 1942-9045
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Karnwal, N., Singh, M., Singh, N., Ansari, M.A. (2022). Comparative Analysis of Phasor-Phasor and Detailed-Phasor Models of Regulating Transformer. In: Sharma, D.K., Peng, SL., Sharma, R., Zaitsev, D.A. (eds) Micro-Electronics and Telecommunication Engineering . ICMETE 2021. Lecture Notes in Networks and Systems, vol 373. Springer, Singapore. https://doi.org/10.1007/978-981-16-8721-1_4
Download citation
DOI: https://doi.org/10.1007/978-981-16-8721-1_4
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-8720-4
Online ISBN: 978-981-16-8721-1
eBook Packages: EngineeringEngineering (R0)