
Abstract
The study presents the design and fabrication process of a novel microfluidic active droplet generator and development of a controller to actuate the integrated micropumps. The proposed active droplet generator consists of a droplet generation geometry and two microfluidic pumps to control the flow rate of the continuous phase fluid and the dispersed phase fluid to generate a microflow towards the droplet generation geometry. The droplet generator is developed based on flow-focusing geometry. Proposed micropumps have a pump chamber and a reservoir. A layer by layer method is adapted in fabricating the active droplet generator in which Polymethyl Methacrylate (PMMA) is used as the material. A heat treating based bonding method is discussed in combining fabricated PMMA layers together. Piezoelectric transducer, which is used as the actuator, is made of Lead Zirconate Titanate (PZT) and integrated into the micropump geometry to produce the microflow. The developed controller is capable of providing a range of shapes, frequencies, and amplitudes for the input signal leading to successful operations of the active droplet generator.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Micro electro mechanical systems (MEMS) is an emerging technology which is widely applied in a variety of application areas in engineering disciplines such as automotive, biomedical, aerospace, and etc. At present, integration and miniaturization of functionalities related to biomedical systems, organs and laboratories are being thoroughly explored and have introduced system-on-a-chip, organ-on-a-chip, and lab-on-a-chip (LOC) research directions, respectively. LOC devices shrink two or more functions of a laboratory into one single chip which has the ability to perform point-of-care (POC) diagnostics [1]. LOC devices are a category of microfluidic devices which have the ability to manipulate small volumes of fluid. Polymerase Chain Reaction (PCR) test is one such LOC based diagnostic tool used to identify the Coronavirus in COVID-19 pandemic situation [2]. In performing laboratory test related tasks, LOC devices require various modules for sampling, transportation, preparation, separation, detection, and analysis. LOC devices related to sampling of fluids into small volumes is discussed in droplet based microfluidics, furthermore droplet generation and transportation is at interest due to the applicability in biomedical applications such as drug delivery systems, micro reactors, POC devices, drug encapsulation, etc. [3].
Droplet generation systems focus on creating discrete volumes of fluids using immiscible phase fluids enabling high throughput analysis and synthesis conditions of a large number of samples using a small volume. Additional advantages of microfluidics are operational flexibility, minimum material usage, higher resolution in separation, fast analysis, high detection sensitivity, and small footprints [4]. Three major techniques in microfluidics that use two-phase flow to generate droplets are digital microfluidics, gas-liquid, and liquid-liquid. Liquid-liquid technique omits the major drawback in digital microfluidics, which is the electrode size limits the generation of smaller droplets and only requires a system to generate microflows of one phase of matter which is liquid suitable for biomedical applications [5]. Depending on the generation method, droplet generators are mainly divided into two categories, as active and passive types. Active droplet generation requires an external power source to generate droplets, and by altering this input signal droplet manipulation is achievable [6]. Major parameters observed in droplet generation are droplet sizes and the generation frequency. T. Ward et al. presented a study on controllability of an automatic droplet generator based on droplet size and frequency [7]. Controllability is an important parameter of active droplet generators which is required in implementation of droplet generation modules to LOC devices. In liquid-liquid technique, controlling flow rates of the two immiscible liquids is important in formation of monodisperse droplets. Micropumps are capable of delivering fluid from one place to another in a controllable manner. Considering the various actuation mechanisms, micropumps are divided into mechanical type and non-mechanical type micropumps. Comparing the types of micropumps, non-mechanical micropumps limit its working fluid depending on the method that is used for actuation. Various studies on controlling micropumps are presented, and the micropumps use valves (active and passive) or fixed geometry (nozzle-diffuser, tesla valves, nozzle jet) based designs to control the fluid flow. Fixed geometry based (valveless) designs have comparative advantages such as durability, fabrication simplicity, and less complexity in controlling [8].
With advancements in micro scale fabrication technology, researchers have successfully implemented and developed numerous fabrication methods and processes in recent studies. Most of the microfluidic devices are fabricated using lithographic techniques. Polydimethylsiloxane (PDMS) is used as the substrate of the traditional microfluidic devices due to its biocompatibility and optical transparency. The photolithography process and the equipment used in the process is expensive as it requires infrastructure such as cleanroom facilities. Due to the limitations in lithographic techniques, prototyping of multilayer microfluidic chips is being investigated widely [9, 10]. Micromilling is one such alternative to photolithography as it is a fast and semi-automated process. Thermoplastics such as polycarbonate are widely used in micromilling based fabrication of microfluidic devices. CO2 laser machining is also used for layer based fabrication techniques on polymers such as PMMA, PDMS and Polycarbonate for rapid production of microfluidic devices [11]. For successful functionality of microfluidic devices, damages to the channels have to be avoided in the fabrication process and the transparency of each layer has to be maintained for clear observation and detection. Vacuum heat press bonding, CO2 gas solvent based bonding, and Isopropyl alcohol based bonding are several methods discussed in work related to layer by layer fabrication technique [12,13,14].
A PZT based active microfluidic droplet generator including valveless micropumps and a flow-focusing based droplet generation geometry is proposed in this study.
2 Proposed Design and Working Principle
Active droplet generation methods are mainly divided into two categories as methods based on additional forces and methods based on intrinsic forces. Centrifugal, magnetic, and electric forces based methods are examples discussed in literature for additional forces based methods. In regards to intrinsic forces based methods, the intrinsic forces generated by changing fluid velocity, and material properties such as viscosity, channel wettability, and density [15]. The proposed active droplet generation geometry includes two micropumps, and a droplet generator. In addition, the system consists of a main controller, function generator and an oscilloscope. Figure 1 shows the components of the proposed system for the study.

Proposed system layout.
Among the aforementioned two types, the intrinsic method based on fluid velocity changing method is proposed for the study due to not having limitations on working fluid (as an example the magnetic forces based droplet generators require conductive fluid to generate a microflow) and less complexity in the development process. Therefore, it is required to deliver small volumes of continuous phase fluid and dispersed phase fluid to the microfluidic droplet generator in a controllable manner. A micropump is a device with a capability to deliver a small volume in a controllable manner. In this study two micropumps are used to control flow velocities of the continuous phase and dispersed phase. Table 1 presents a categorization of micropumps based on the actuation method.
The proposed micropump design belongs to the valveless nozzle jet type and also double diaphragm type. Main components of the micropump are the pump chamber and the reservoir. The significance is that the micropump was designed using a layer by layer method and is fabricated using the laser fabrication method. The pump chamber contains five layers and the reservoir contains three layers. The micropump design is presented in [16] as it is studied at a previous stage of the research.
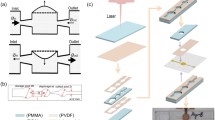
The microfluidic channel provides a boundary for the microflow in the device, and its geometry has a direct impact on droplet generation. Cross-flow, co-flow, flow-focusing, and emulsification are the major four geometry types discussed in relation to droplet generation. Among these methods, flow-focusing geometry is recommended to produce comparatively smaller droplets [15]. In flow-focusing geometry based devices, the two immiscible fluids are hydrodynamically focused and thereafter elongated when passing through a contraction leading to generation of droplets. Figure 2 shows the schematic diagram of the droplet generation process in a flow-focusing based geometry.

Droplet generation based on flow-focusing geometry.
3 Design and Fabrication of the Active Droplet Generator
Initially, micropumps and the droplet generator geometry are designed as separate units, based on layer by layer method in a manner that a sequential bonding of the layers results in a single microfluidic device. Secondly, the designed layers are cut on clear acrylic sheets using laser cutting technique. Pump chamber and reservoir of each micropump are bonded as separate units in the process using heat treatment (HT) based bonding and later bonded together after gluing PZT discs. Finally, two micropumps are bonded on the bottom surface of the droplet generator geometry and the overall fabrication process is shown in Fig. 3. Layer by layer fabrication is considered as a thin film fabrication technique. Therefore, each layer of the design is modelled using SOLIDWORKS® software.

Fabrication process.
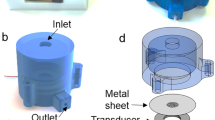
Figure 4 shows the layers of the droplet generator, reservoir, pump chamber, and the complete assembly of the device. Inlet and outlet channels dimensions of the droplet generator are selected to reduce fluidic resistance.

Layer by layer design of the (a) Active droplet generator including two micropumps; (b) Droplet generator; (c) Reservoir; (d) Pump chamber.
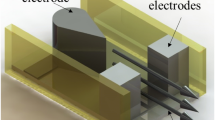
Height of the inlet and outlet channels (shown in Fig. 5) are 1 mm and the width is 4 mm and 6 mm respectively. Height, width, and length of the contraction geometry are 1 mm, 1 mm, and 2.5 mm. Size of the droplet generation geometry is 220 mm × 60 mm × 4 mm. Considering the micropump, the cross section of the nozzle jet design is 1 × 0.3 (mm2). Size of the micropump chamber is 100 mm × 60 mm × 7 mm and the volume of the reservoir is 10 cm3. A layer with 5 mm thickness is added as the top layer of the reservoir to insert the fluid.

Droplet generator layer design.
The nozzle jet type valveless micropump design has a minimum feature size of 300 µm at the nozzle end. Layer design with the nozzle jet geometry is shown in Fig. 6.

Middle layer of micropump design.
The significance of layer by layer fabrication method is the ability to scale down to nanometer scale using silicon based MEMS fabrication technology. Due to the bio compatibility, transparency, cost effectiveness and availability, PMMA is selected for the fabrication of the active droplet generator. Additionally, using PMMA sheets as the material provides advantages in laser machining and assembling of microfluidic devices using layer bonding. Comparing layer by layer method with silicon deposition based fabrication, in the latter case requirements of advanced technology and equipment are significant. Therefore, each layer of the design is fabricated using PMMA sheets by laser machining and the layers after fabrication are shown in Fig. 7. RECI W4 laser cutting machine having a CO2 laser tube is used and the power rating of the laser beam is 200 W.

Fabricated layers using laser machining technique (a) Droplet generator; (b) Pump reservoir; (c) Pump chamber.
PMMA sheets having 1 mm thickness are used for all layers of the droplet generator, layer two to four (from the bottom) of the pump chamber, and the bottom layer of the reservoir. Bottom layer and layer five belonging to the pump chamber use 2 mm thickness, and second and third layers from the bottom of the pump reservoir are fabricated using 5 mm PMMA sheets. Laser beam with a diameter of 0.02 mm is focused on the top surface of the PMMA sheet with a cutting power of 35 W. Cutting speeds are set to 20 mms−1, 15 mms−1, and 5 mms−1 are used for sheets having 1 mm, 2 mm, and 5 mm thicknesses respectively. A heat treatment based bonding technique is used to combine adjacent layers and the steps of the bonding process is shown in Fig. 8.

Heat treatment based bonding process.
At the beginning of the bonding process, the PMMA sheets are thoroughly cleaned with 70% isopropyl alcohol. A thin film of solvent is added between the PMMA sheet surfaces and then layers are aligned sequentially and clamped onto each other using clamping clips before heat treating. Screw bolts are driven through the holes shown in Fig. 4 and are fixed using nuts to ensure proper alignment of the layers. As the next step, fabricated layers are heat treated at 68 °C for 15 min using an electrical oven and are left to cool down to room temperature. After bonding the pump chamber, two piezoelectric discs are bonded on the top surface of layer 9 and bottom surface of layer 11 using Cyanoacrylate as the bonding medium. KBS-35DA-3A type piezoelectric transducers are used as PZT discs shown in Fig. 9.

Components of the piezoelectric transducer.
The diameter of the brass disc is 35.0 ± 0.1 mm and the thickness is 0.25 ± 0.03 mm. The PZT disc has a diameter of 25.0 ± 0.1 mm and a thickness of 0.53 ± 0.1 mm. The electrode disc diameter is 23.5 mm and a thickness similar to the PZT disc. Then, reservoir layers are bonded using the HT based bonding method as a separate unit. Similarly, the two fabricated micropumps are bonded with the droplet generator to form the device.
4 Development of the Controller
In controlling an active microfluidic droplet generator operating on fluid velocity changing methods using a flow-focusing geometry, the flow rate is the major parameter. In the proposed device, the flow rate is controlled by varying the actuating parameters of the integrated PZT disc. Therefore, a controller is developed to provide the flexibility in introducing various waveforms, input frequencies, and peak to peak voltages to the micropump which consists of two PZT discs. A function generator is used to introduce a range of frequencies and voltages whereas an oscilloscope is used to measure the output of the control circuit. Figure 10 presents a diagram that illustrates the hardware setup of the controller.

Hardware setup for controlling.
The controller amplifies the input signal from the function generator and transmits the amplified signal to micropump through a step-up transformer to actuate the micropump. The developed main controller and electronic components are shown in Fig. 11.

Main controller.
Function generator (Tektronix AFG 2021) is able to generate sinusoidal, square and trapezoidal signals, ranging from 10 mV to 10 V in amplitudes and 1 µHz to 20 MHz in frequencies. A step-down transformer (1 A) is used to step down the 230 V to 18 V to power up the TDA7293 based power amplifier that amplifies the signal received from the function generator. Amplified signal is measured by using a digital oscilloscope (Tektronix TBS1102B-EDU).
5 Results and Discussion
The droplet generator and the two micropumps are assembled together successfully and the resulting device has a length, width and height of 200 mm, 60 mm, and 22 mm respectively. As a solvent assisted bonding process is used, the major issue occurred in fabrication is the incapability to bond PMMA sheets together in one step. The droplet generator design has layers with several designs which are different from adjacent layers, and it is difficult to clamp two layers with uniform surface contact. In addition, this issue is further enhanced with the increment in the number of layers. This leads to an uneven spread of the Isopropyl alcohol when sheets are bonded together as one single device resulting in voids which are unfavorable for the fluid flow in channels. Therefore, the bonding step needs several iterations to ensure successful bonding between layers and it is required to fill the voids with the solvent followed by heat treating. Micropump is fabricated by combining the layers of the pump chamber, reservoir, and two PZT elements and the fabricated micropump is shown in Fig. 12.

Micropump after bonding process.
The Piezoelectric effect of the discs depends on the input voltage and the frequency of the signal. Initially, performance of a PZT transducer against a square, trapezoidal, and sinusoidal waveform is observed at an amplitude range of 10 mV to 3 V and a frequency range of 1 Hz to 300 Hz. When a square or a trapezoidal function is provided to the PZT element, there is noise due to sudden fluctuations in the input signal. Frequent failure of the PZT element is also experienced with aforementioned signal types. Conversely, when a sinusoidal waveform is selected a minimum distortion of the signal, noise, and failure is observed. It is observed that PZT elements require a smooth input signal for successful operation. The sinusoidal waveform is selected to the proper functionality of the droplet generator and an operating voltage range for a set of given frequencies is identified. In this regard, input voltage value is changed using the function generator where the frequency is set to a specific value at each test. Figure 13 shows the operating voltage range obtained in each test carried out for the frequency values 10 Hz, 15 Hz, 20 Hz, 25 Hz, 30 Hz, and 35 Hz.

Frequency vs. operating voltage.
No load conditions of the control circuit are tested to identify the cutoff region of the output signal when changing voltage and frequency of the input signal. The maximum output voltage of the TDA7293 based power amplifier is 50 V. At a constant frequency value of 100 Hz, the input peak to peak voltage value is decreased from 1.8 V to 1.3 V and the cut off region disappears at 1.6 V. Accordingly, the input voltage is maintained at or below 1.6 V. It is observed that the micropump is actuated at input voltage values greater than 100 V. Therefore, the maximum peak to peak output signal of the amplifier which is below 50 V is increased to a value above 100 V using a 12 V to 230 V full wave step-up transformer (1 A). Additionally, as the micropump is a double diaphragm type the actuating signal is provided at the same phase to achieve suction and compression pumping stages. To perform droplet generation, it is needed to actuate both pumps independently, therefore two similar controllers are required. Active microfluidic droplet generator is assembled by combining the two micropumps with the droplet generation layers as shown in Fig. 14.

Fabricated active microfluidic droplet generator.
Micropump 1 pumps the dispersed phase to the dispersed phase inlet channel which is located 15 mm above the pump outlet channel which is the layer 9 (shown in Fig. 4). Similarly, micropump 2 pumps the continuous phase to the continuous phase inlet channel located at a same height. Therefore, the pump head loss is neglected as it is considered to have similar effect in performance of both pumps. Due to the optical transparency provided by the PMMA material, PZT transducers are clearly visible to the top view of the device. Electrical connections are attached to avoid each inlet of micropumps and the outlet of the droplet generator to secure the device from contamination with the fluids.
6 Conclusion
A PZT based active droplet generator is successfully designed and fabricated with the capability to control the flow rates of continuous and dispersed phase fluids which is required to control the droplet sizes and generation frequency. The layer by layer method based fabrication technique proposed in the study is implemented for the components of the device including the droplet generator, micropump chamber, and reservoir. All the layers are fabricated using laser machining technology and combined using a heat treatment based bonding method. It is concluded that the layer by layer method together with laser cutting technology provides an effective combination in fabricating microfluidic devices. In this research, PMMA material is used to fabricate the layers of the active droplet generator. PMMA is considered 100% recyclable material and it is considered biodegradable. Therefore, this developed active droplet generator can be recyclable and biodegradable after its use. Significant importance of the sustainable designs are the minimalistic negative impact on the environment, hence usage of PMMA adds this advantage to the presented droplet generator. PZT based piezoelectric transducers are used to actuate the device and it is observed that the input signal with sinusoidal waveform performs smoother than square and trapezoidal waveforms in actuation. The developed controller possesses the ability to provide a sinusoidal waveform in a range of voltages and frequencies. Results show that the maximum voltage with reference to a given frequency increased.
In future, with the identified operating range of frequencies and the voltages of the micropumps, the droplet generator can be tested for different flow rates of dispersed and continuous phase fluids. Thereafter, the relationship between the diameter of the droplets formed and the droplet generation frequency can be studied with the flow rate ratios of the fabricated micropumps. To observe the effect of the surface roughness in generating droplets, application of surfactants on microchannel surfaces is required prior to the experimental procedures. Finally, the study will be directed towards the feasibility of integrating the PZT based active droplet generator to a Lab-on-a-chip device.
References
Arshavsky-Graham, S., Segal, E.: Lab-on-a-chip devices for point-of-care medical diagnostics. Springer, Heidelberg (2020). https://doi.org/10.1007/10_2020_127
Tymm, C., Zhou, J., Tadimety, A., Burklund, A., Zhang, J.X.J.: Scalable COVID-19 detection enabled by lab-on-chip biosensors. Cell. Mol. Bioeng. 13(4), 313–329 (2020). https://doi.org/10.1007/s12195-020-00642-z
Feng, H., et al.: Droplet-based microfluidics systems in biomedical applications. Electrophoresis 40(11), 1580–1590 (2019). https://doi.org/10.1002/elps.201900047
Dressler, O.J., Maceiczyk, R.M., Chang, S.-I., DeMello, A.J.: Droplet-based microfluidics: enabling impact on drug discovery. J Biomol Screen 19(4), 483–496 (2014). https://doi.org/10.1177/1087057113510401
Glawdel, T., Elbuken, C., Ren, C.L.: Droplet generation in microfluidics. encyclopedia of microfluidics and nanofluidics. In: Li, D. (ed.) Springer, Boston, pp. 1–12 (2013). https://doi.org/10.1007/978-3-642-27758-0_1713-1
Chong, Z.Z., Tan, S.H., Gañán-Calvo, A.M., Tor, S.B., Loh, N.H., Nguyen, N.-T.: Active droplet generation in microfluidics. Lab Chip 16(1), 35–58 (2016). https://doi.org/10.1039/C5LC01012H
Gawel, D., Zawala, J.: Automatic single droplet generator with control over droplet size and detachment frequency. Colloids Interfaces 3(3), 57 (2019). https://doi.org/10.3390/colloids3030057
Iverson, B.D., Garimella, S.V.: Recent advances in microscale pumping technologies: a review and evaluation. Microfluid Nanofluid 5(2), 145–174 (2008). https://doi.org/10.1007/s10404-008-0266-8
Chen, X., Shen, J., Zhou, M.: Rapid fabrication of a four-layer PMMA-based microfluidic chip using CO 2 -laser micromachining and thermal bonding. J. Micromech. Microeng. 26(10), 107001 (2016). https://doi.org/10.1088/0960-1317/26/10/107001
Sampath, W.H.P., Hettiarachchi, S.P., Melroy, N.H.R.G., Amarasinghe, Y.W.R.: Design and development of a droplet-based microfluidics system using laser fabrication machining techniques for a lab on a chip device. In: Chen, Y.-W., Tanaka, S., Howlett, R.J., Jain, L.C. (eds.) Innovation in Medicine and Healthcare. SIST, vol. 192, pp. 201–210. Springer, Singapore (2020). https://doi.org/10.1007/978-981-15-5852-8_19
Scott, S., Ali, Z.: Fabrication methods for microfluidic devices: an overview. Micromachines 12(3), 319 (2021). https://doi.org/10.3390/mi12030319
Wang, J., Liu, G., Li, X., He, F., Ma, X.: A micromixer with two-layer crossing microchannels based on PMMA bonding process. Int. J. Chem.l Reactor Eng. 17(8) (2019). https://doi.org/10.1515/ijcre-2018-0265
Wu, C.-L., Li, C.-C., Lu, C.-F., Yang, S.-Y.: Development of two step carbon dioxide assisted thermal fusion PMMA bonding process. Microsyst Technol 18(4), 409–414 (2012). https://doi.org/10.1007/s00542-012-1427-y
Bamshad, A., Nikfarjam, A., Khaleghi, H.: A new simple and fast thermally-solvent assisted method to bond PMMA–PMMA in micro-fluidics devices. J. Micromech. Microeng. 26(6), 065017 (2016). https://doi.org/10.1088/0960-1317/26/6/065017
Zhu, P., Wang, L.: Passive and active droplet generation with microfluidics: a review. Lab Chip 17(1), 34–75 (2017). https://doi.org/10.1039/C6LC01018K
Munas, F., et al.: Development of PZT actuated valveless micropump. Sensors 18(5), 1302 (2018). https://doi.org/10.3390/s18051302
Acknowledgement
This work was supported by the Accelerating Higher Education Expansion and Development (AHEAD) – Development Oriented Research (DOR) grant of the Centre for Advanced Mechatronic Systems (CFAMS), University of Moratuwa, Sri Lanka. The authors would like to express their gratitude to CFAMS, Faculty of Graduate Studies and the Department of Mechanical Engineering, University of Moratuwa for their valuable advice and guidance towards the success of the research. Further, authors would like to acknowledge the facilities given by the Mechatronics Systems Laboratory at Department of Mechanical Engineering and the Latex Technology Laboratory at Department of Chemical and Process Engineering, University of Moratuwa.
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Melroy, G. et al. (2022). PZT Based Active Microfluidic Droplet Generator for Lab-on-a-Chip Devices. In: Scholz, S.G., Howlett, R.J., Setchi, R. (eds) Sustainable Design and Manufacturing. KES-SDM 2021. Smart Innovation, Systems and Technologies, vol 262. Springer, Singapore. https://doi.org/10.1007/978-981-16-6128-0_27
Download citation
DOI: https://doi.org/10.1007/978-981-16-6128-0_27
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-6127-3
Online ISBN: 978-981-16-6128-0
eBook Packages: EngineeringEngineering (R0)