
Abstract
Dual-motor electric powertrain offers the independent control and less energy consumption in plug in hybrid electric vehicle model. The component sizing and control strategy are play the important role in dynamic control, power management and energy saving. The proposed system vehicle architecture comprises the dual motor, downsized engine and synchronizer. For optimizing the dynamic load sharing with the dual-motor powertrain configuration, rule-based fuzzy logic control strategy is implemented. The variable load will be managed by the way of selecting different transmission topologies using fuzzy logic control strategy. This dual-motor architecture configuration is simulated using Simulink software. Single motor propulsion drive control is engaged for all driving pattern except the peak load condition. In peak load, such as acceleration mode and high-speed mode, the dual-motor power transmission is engaged. The powertrain configuration is test at different dynamic and load conditions. As a result, it shows the better drivability, high efficiency and extended driving range.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
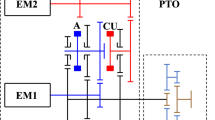
The day-by-day usage fossil fuel rapidly increasing, due to this rising oil prices, makes more impact on transport sector and economic. On other hand, the usage of oil causes the air pollution, global warming, acid raining, etc. So, most of the governments are encouraging the people to use electric vehicle [1,2,3]. The pure electric vehicle has features of zero emission, economic operation, less maintenance, etc. Even though pure electric vehicle has problem of long-range driving problem due to limited energy storage, long charging periods, the people are reluctant to buy the electric vehicle [5,6,7,8,9]. So, auto industries and many researchers are finding feasible solution for electric vehicle. Plug-in hybrid electric vehicles have features of extended driving range, grid charging, multi-mode of operation the powertrain configuration of PHEV as shown in Fig. 1.

Powertrain configurations for plug-in hybrid electric vehicle
where the \(P_{{{\text{em}}}}\) is the power produced by the electric motor, \(P_{{{\text{eng}}}}\) is the power produced by the ICE engine, \(P_{{{\text{hve}}}}\) is the total power the hybrid power propulsion system, \(F_{r} \) is aerodynamic drag, \(F_{I}\) is inertial force, \(F_{s}\) is the road slope force, \(F_{a}\) is the aerodynamic drag force, \(P_{{{\text{Total}}}}\) is the total traction power, \(F_{{{\text{Total}}}}\) is the traction force, V is the vehicle speed, \(E_{{\text{Total }}}\) is vehicle energy required, road load coefficient, \(Crr\) is the road load coefficient, g is the gravitational acceleration, m is the mass of the vehicle, \(\theta\) is the road slope angle, \(\rho\) is the air density, \(C_{d}\) is the air drag coefficient, A is the vehicle frontal area, D is the distance of travelling (Table 1).
2 Modes of Hybrid Drive System
The plug-in hybrid vehicle, powertrain, comprises the dual motor, downsized engine and synchronizer. The rule-based fuzzy logic controller is developed for various load conditions of transmission pattern [10,11,12]. The different powertrain patterns are shown in Fig. 2. The SoC of the battery and power demand of vehicle are the two main controlling parameters. Based these values rule-based controller will decide the configuation of powertrain elements. The operating mode of the vehicle is mainly classified as start/stop, acceleration, cruising, de-acceleration, idle. The power demand of the vehicle is very high, when its operating either in cruising mode or acceleration mode. The acceleration and high-speed mode, i.e., cruising mode the power demand of the vehicle is so high [13,14,15]. In this peak power demand condition, the torque requirement of the vehicle is met by the dual-motor powertrain. The remaining mode of operation is managed by the single motor powertrain. The result of single motor power configuration, extended driving range, fuel economy, extended battery life can be obtained. The result of single motor driving, this system can obtain fuel economy, battery saving, extended driving range.

a Single motor drive control, b series hybrid powertrain, c dual-motor drive control, d dual-motor series hybrid powertrain
3 Operation Mode Transition
The powertrain driving propulsion pattern condition is explained through flow chart as shown in Fig. 2. Fuzzy controller evaluated the SoC of the battery and vehicle travelling distance (D). If energy storage system parameter is in acceptable range, i.e., (SoC > D), the driving pattern will be identified either dual-motor drive or single-motor drive condition. In case, SoC < D, the engine turns to on condition for charging the battery. The transient condition is periodically evaluated and improved by the rule-based fuzzy logic controller. If SoC is 0.6 < SoC < 0.8 and the power demand is P_dem ≤ P_em1, condition results the motor A met the torque requirement of the vehicle. Even SoC of the battery in the range of 0.6 to 0.8 and power demand is high (P_dem ≥ P_em1), the dual-motor powertrain configuration will met the torque requirement of the electric vehicle (Fig. 3).

Flow diagram of the control strategy
4 Simulation
In this proposed method, rule-based fuzzy controller was designed for the plug-in electrical vehicle to enhance the fuel economy and battery energy savings. The control strategy of fuzzy membership is created based on the power demand and SoC of the battery as shown in Fig. 4. The fuzzy membership for load control is shown in Fig. 4. For the different load condition, the controller will meet the power demand of the vehicle, based the load sharing in propulsion system (Figs. 5 and 6).

Fuzzy membership for input

Fuzzy membership for output

3D Fuzzy control rule
In order to verify the energy consumption of the powertrain, the proposed system is simulated for various driving conditions. Dual-motor powertrain power output is shown in Fig. 7a. Low SoC condition was initiated for operating engine and generated in charging mode. The powertrain element shaft output is shown in Fig. (b). In start mode, the single motor driving pattern will meet the torque requirement of the vehicle from 0 to 2 s time period. The battery power loss is minimum in starting condition, and SoC of the battery is improved in this mode as shown in Fig. 7c, d.

a Dual-motor powertrain output. b Powertrain element shaft output. c Battery power loss. d Battery SoC at various load conditions
When vehicle moves to the accelerating mode during the time interval of 2–5 s, the high-power demand occurs and the controller will optimize the load sharing of propulsion elements. In this mode, the dual-motor powertrain is configured. So, the powertrain requires consume more charge for the propulsions of the vehicle; due to this, the battery power loss increases rapidly and SoC decreases linearly. The vehicle was entering into cruising operation after the acceleration mode, so the controller will estimate the power demand and identifies feasible control strategy for this mode. In this cruising mode, vehicle operates by single motor powertrain to provide constant speed. So, the battery power loss is constant and SoC is linearly decreasing. The effect of the control strategy results, better dynamic control and extend driving range was obtained.
5 Conclusion
In this work, extending driving range of vehicle dual-motor propulsion powertrain is configured. By using the rule-based fuzzy logic controller, the control strategy is developed for different driving patterns. This system is design using Simulink software and tested for various load dynamic conditions. Peak load condition in dual-motor powertrain met the power demand of the load. All other load conditions are managed with single motor powertrain configuration. Compared to the conventional hybrid model, dual-motor powertrain offers the extended electric mode of operation. The result shows the better drivability and improved overall performance.
References
Wang F, Fang Z, Zhu X (2011) Matching, simulation and optimization of the new power transmission device for an electric vehicle. Autom Eng 33(9):805–808
Wang Y, Sun D (2014) Powertrain matching and optimization of dual-motor hybrid driving system for electric vehicle based on quantum genetic intelligent algorithm, vol 2014. Hindawi Publishing Corporation
Lv C, Zhang J, Li Y, Yuan Y (2015) Mechanism analysis and evaluation methodology of regenerative braking contribution to energy efficiency improvement of electrified vehicles. Energ Convers Manag 92:469–482
Zhang L, LiuW, Qi BN (2020) Energy optimization of multi-mode coupling drive plug-in hybrid electric vehicles based on speed prediction. Energy 206
Wang Y, Zeng X, Song D (2020) Hierarchical optimal intelligent energy management strategy for a power-split hybrid electric bus based on driving information. Energy 199
Xu J-H, Guo J-F, Peng B, Nie H, Kemp R (2020) Energy growth sources and future energy-saving potentials in passenger transportation sector in China. Energy 206
Goetz M (2005) Integrated: powertrain control for twin clutch transmissions. Univ. Leeds, Leeds, U.K
Wang W, Li Y, Shi J, Lin C (2018) Vibration control method for an electric city bus driven by a dual motor coaxial series drive system based on model predictive control.IEEE Access 6:41188–41200
Wang W, Zhang Z, Shi J, Lin C, Gao Y (2018) Optimization of a dual-motor coupled powertrain energy management strategy for a battery electric bus based on dynamic programming method.IEEE Access 6:32899–32909
Ruan J, Walker PD, Zhang N, Wu J (2017) An investigation of hybrid energy storage system in multi-speed electric vehicle.Energy 140:291–306
Morozov A, Humphries K, Zou T, Martins S, Angeles J (2014) Design and optimization of a drivetrain with two-speed transmission for electric delivery step van.In: Proceedings of IEEE international electric vehicle conference (IEVC), Florence, Italy, December 2014, p 18
Kim H, Kim J, Lee H (2011) Mode transition control using disturbance compensation for a parallel hybrid electric vehicle. Proc IMechE Part D J Autom Eng 225:150–166
Enang W, Bannister C (2017) Modelling and control of hybrid electric vehicles (A comprehensive review). Renew Sust Energ Rev 74:1210–1239
Naunheimer H, Bertsche B, Ryborz J et al (2010) Automotive transmissions: fundamentals, selection, design and application. Springer Science & Business Media, Dordrecht
Enang W, Bannister C (2016) Robust proportional ECMS control of a parallel hybrid electric vehicle. Proc IMechE Part D J Autom Eng 231:99–119
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Balan, V.K., Avirajamanjula, P., Savio, A.D. (2022). Electric Propulsion System with Dual-Motor Power Management Strategy. In: Subramani, C., Vijayakumar, K., Dakyo, B., Dash, S.S. (eds) Proceedings of International Conference on Power Electronics and Renewable Energy Systems. Lecture Notes in Electrical Engineering, vol 795. Springer, Singapore. https://doi.org/10.1007/978-981-16-4943-1_53
Download citation
DOI: https://doi.org/10.1007/978-981-16-4943-1_53
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-4942-4
Online ISBN: 978-981-16-4943-1
eBook Packages: EnergyEnergy (R0)