
Abstract
Herein, the authors describe an overall approach to the architectural design of floating structures such as floating houses. The primary aim of this study is not to present a method for stabilizing floating structures, but rather to provide a design synthesis method for use when designing such structures. More specifically, we propose an integrated procedure for use at the preliminary design stage of such structures that systematically facilitates their overall design. As an inclining platform could endanger the people on board, it is necessary to determine an adequate metacentric height in order to prevent such occurrences. This measurement, which is defined as the distance between the center of gravity of a floating structure and its metacenter, quantifies the initial static stability of a floating body. Based on this idea, we consider the associated problems as well as the methods used in practical procedures, and combine them to introduce a unique approach called the “required GM” method. We also discuss the different and various aspects used in basic configuration determinations of floating architectural structures, such as the aspect of static stability and the overall process used at the conceptual design stage. In addition, illustrative examples of an idealized floating platform embodying the simplest possible structures are provided to illustrate these points.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In spite of widespread movements to reduce greenhouse gas emissions, substantial reductions have yet to be achieved, and it may already be impossible to halt the acceleration of rising sea levels caused by the influence of global warming [1]. The situation is worsened when we consider that many of the world’s cities are located in low-lying areas that are in dangerous proximity to the sea and/or large rivers. A novel remedy against such serious conditions is to modify such cities by incorporating floating solutions into architectural structures as a way to achieve safety and security against flooding hazards [2, 3]. Examples of such dangerous conditions can be seen in the island nation of Singapore, which must be constantly vigilant against flooding because most of the island is flat and very close to sea level. Since Singapore also suffers from both shortages of both freshwater and available land, we have previously explored a unique floating solution that involves extensive, large-scale excavations of flat areas in order to create numerous artificial reservoirs, on top of which pontoon-type buoyant structures with supertall and high-density residential buildings can be constructed [4]. This method, which is designed to transform water surfaces into floating cities, also provides potential solutions to increased population levels (Fig. 1), and it is expected that many other cities around the world could potentially benefit by utilizing similar structures to avoid future flooding crises.

Perspective view of “Singapore Water City”
At the other end of the size spectrum, tremendous numbers of floating houses have already been constructed on seaside areas and lakes all over the world [5]. However, since these floating houses are small in size, they are relatively unstable, which means they frequently move under the influence of the winds and waves. This can cause many people to feel uncomfortable. In contrast, large floating hotels and/or urban condominiums built on floating foundations can provide more stable, and thus more comfortable, alternatives to small floating houses. In all such cases, to ensure occupant comfort and safety, the most important factors related to such floating structures are static stability and need to prevent unfavorable listing that could result from various loadings. Nevertheless, there will likely be an increasing need for even more floating structures in the near future, since climate change and rising sea-levels due to global warming will become rapidly more serious.
In a previous study, Takarada et al. [6] introduced a unique scheme called the “Required GM” method, which can be used to minimize the large-scale listing of semi-submersible oil rigs that might result from various environmental loads. Herein, that method is modified for the purpose of designing the floating architectural configurations by minimizing the inclining angles that can be generated. We believe that our proposed method is practically applicable for determining the structural elements of pontoon-type floating structures, and can be expected to have more practical applications when used by architects and/or designers at the preliminary design stages of such structures.
2 On the Stability of Floating Architectures
2.1 General
The need for stability plays a key role in the design of floating structures. Some items and/or elements of static stability for a floating structure are shown in Fig. 2. Indeed, its impacts on safety and comfort make it a fundamental consideration for architects and/or designers in their preliminary design stages. Therefore, at the beginning of the design process, it is important to determine the size of some principal elements, such as the length, width, and depth of the floating foundation. For a floating structure, the most important aspect of static stability is the location of the center of gravity (G). In this section, we discuss some fundamental studies on static stability for a pontoon-type floating structure as well as the basic theory of static stability. Here, the wind force is considered to be the most influential force, since it has generally been regarded to be the main force that must be counteracted according to the existing rules and/or regulations of classification societies. More details on wind force as well as wind intensity change with respect to height are shown in Appendix A.

Items of static stability
2.2 Fundamentals on Static Stability for Floating Architecture
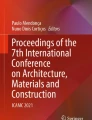
When external forces such as wind act on a floating body, the free-floating body tilts due to the heeling (or overturning) moment introduced by forces such as that caused by wind, with the location of the center of buoyancy (B) shifting leeward and then the platform tilting in the inclining angle (ϕ), as is shown in Fig. 3. At that point, the corresponding righting (or restoring) moment (MR) is created to cancel out this heeling moment.

Inclined condition of a platform due to winds
The righting moment (MR) is given by
where F is buoyancy, which is equal to the weight of the floating structure (W), g is the gravity, and ρ is the water density. The \(\overline{\text{GZ}}\) is the horizontal distance (or lever arm) and is expressed by the following equation as in Ref. [6].
When ϕ is very small, the second term of this equation can be ignored as follows.
This term also appears in the righting moment MR as
If the vertical distances of both the center of buoyancy (KB) and KG are known (see Fig. 2), both the KM and \(\overline{\text{GM}}\) values are estimated easily by calculating the \(\overline{\text{BM}}\) value obtained from the following equation.
Here, Iy is the moment of inertia in relation to the y axis, and is calculated by the following equations in the case of a rectangular pontoon (see Fig. 4).

Right-handed cartesian coordinate system of rectangular pontoon
Additionally, assuming that ϕ is sufficiently small, it can be computed by the following equation from Appendix B:
where \(\sum\nolimits_{\text{i}} {{\text{M}}_{\text{i}} }\) indicates the sum of possible overturning moments caused by various combined loadings while W indicates the total weight of the floating structure.
2.3 Static Stability Comparisons of Floating Architectures
Several computational studies were conducted on the static stability of small-sized floating structures. In those studies, comparisons of the inclining angles that result from the same wind intensity (20 m/s) were carried out to show that platform inclining angle differences occur when the KG is at different locations. The drag coefficient (CD) for the upper structure on the floating pontoon was assumed to be 2.0 for these computations. The configuration and dimensions of a floating house are shown in Fig. 5 and Table 1, respectively.

Vertical and horizontal configuration of a floating house
Figure 6 shows a comparison of inclining angles (in degrees) resulting from wind imposed on the non-dimensional length of pontoons (L/Lx) for four different KG values. In each case, the inclining angle of the floating structure is calculated when 20 m/s wind blows against the upper structure.

Inclination due to wind for different KG values
Generally, it is known that the KGs of most floating structures are located in higher positions and it is largely believed that higher KG values result in platform instability. However, this is often not the case. In fact, Fig. 7 shows that a floating structure with a large enough \(\overline{\text{GM}}\) value can be very stable, even if their KG locations are in high positions.

Inclination due to wind for different GM values
By comparing the inclination between the different KG value locations, the following conclusions can be made:
-
Inclining angles decrease along the size of non-dimensional length (L/Lx) in all four KG cases.
-
Smaller pontoon lengths (L/Lx) result in larger inclining angles for higher KG values.
-
It is obvious that larger pontoon lengths (L/Lx) significantly increase stability.
-
The inclining angle remains almost the same for the longest length (L/Lx), even if the KG differs in height, when compared with those for smaller pontoon lengths.
On the other hand, Fig. 7 shows a comparison of wind-driven inclinations for the different \(\overline{\text{GM}}\) values of 0.5, 1.0, 2.0, and 3.0 m. Here, it can be seen that when the \(\overline{\text{GM}}\) is same, the inclining angle is unaffected even if the pontoon length changes. Thus, since we can conclude that structure stability depends primarily on the \(\overline{\text{GM}}\) value, it can be said that static stability is the dominant factor for floating structures.
3 Determination of Principal Size of Floating Architectures
3.1 General
From previous studies, it is clearly evident that the \(\overline{\text{GM}}\) value is the influential factor in the static stability of a floating structure. Accordingly, when designing floating structures for civil purposes, decisions regarding the appropriate dimensions are derived using the \(\overline{\text{GM}}\) value to ensure comfort as well as safety. The present method reported in this paper is effective for determining the principal size of these structures easily and thus can be utilized by architects and/or designers aiming at creating superb floating architectural designs.
In this paper, the “Required GM” method [6] is used as a tool for determining the principal elements of a floating architecture such as small houses, floating hotels, and similar structures. Furthermore, since the floating structures considered here are general platforms for civil purposes in moderate water environments, the inclining angle is assumed to be sufficiently small. Based on this idea, a new practical method of estimating of the \(\overline{\text{GM}}\) value is presented in the following section.
3.2 The “Required GM (Req. GM)” Method
To begin with, some definitions and assumptions are made here. The simplest yet most fail-safe approach is where the axis is fixed and the floating unit tilts around this axis with zero trim.
In addition, assuming a wall-sided vessel, the following assumptions are made:
-
The steady forces in the vertical direction are small and there are no draft changes.
-
The time averaged righting moment is the same in waves and in calm water.
-
The lower edge of the platform does not raise free of the water when the unit is in an inclined state.
The required GM value is determined in the following equations derived from Appendix B. The \(\overline{\text{GM}}\) value (Req. GM) necessary to avoid a serious inclining angle is provided in Eq. (8). When the ϕ is sufficiently small, the required GM is derived as follows [6]:
where \({\Phi} {\text{d}}\) is inclining angle in degrees.
Accordingly, the \(\overline{\text{GM}}\) value depends upon the sum of the overturning moments. If there are other items to be considered, they may be added as required.
3.3 Computational Approach for a Floating Architecture
Present design methodology is based on the fact, outlined in the previous section, that the static stability of a floating structure is mostly dependent upon its \(\overline{\text{GM}}\) value. However, since a correct KB value is not defined at the beginning, a certain tentative value should be assigned. The design approach for a floating architecture is shown in the computation flowchart of Fig. 8.

Flowchart of computation
First, the underwater volume (V) of a floating architecture and its KG value are computed in advance. Next, all the overturning moments due to wind, current, and other factors are estimated while also determining the ϕ value for the floating architecture.
-
First, the “Req. GM” value is calculated using Eq. (8).
-
Then, the dimensions of principal elements such as the length (tentative), draft (tentative) and so forth for the floating structure are assumed as the first trial.
-
The KB value is then tentatively calculated from these design parameters.
-
Next, the moment of inertia is obtained from the calculated \(\overline{\text{BM}}\) value.
-
The \(\overline{\text{GM}}\), KG, and tentative KB values are used for this computation.
-
Finally, tentative values for the length (L), draft (d), and other factors are obtained.
-
If necessary, a new KG value is computed.
-
If the KG value changes, the “Req. GM” value is calculated again.
-
At that point, the process returns to the previous original step (as shown by the backward arrow on the left side in the flowchart) and the newly obtained L and d values are used for the next trial.
-
This step is repeated until the final design values of L, d, and other related factors have converged.
4 Design Approach for Floating Architectures
4.1 Case Study of a Floating House
4.1.1 Problem
To find an appropriate length (L) and draft (d) for the pontoon of a floating house, as shown in Figs. 9 and 10, assuming the ϕ value becomes 1.5° under the combined conditions of wind force, pile reaction, and the simultaneous movement of eight persons toward the leeward side.

Vertical and horizontal views of a floating house

Photo of a floating house
4.1.1.1 Conditions
-
The wind velocity is 20 m/s (wind force and moment are given as 6,000 N and 4,200 N m, respectively).
-
The reaction force on the pile on the leeward side is given as 6,000 N.
-
Eight persons (64 kg/person) shift 2.26 m towards the leeward side simultaneously.
4.1.1.2 Other Given Data
-
The building mass is 16,500 kg and the pontoon mass is 7,888 kg.
-
The building height, length, and width values are 3.0, 4.5, and 5.0 m, respectively.
-
The pontoon height and width are 1.5 and 5.0 m, respectively.
-
The KG location is given as 2.3 m (fixed).
-
Other data: water density (ρ); 1,000 kg/m3, air density; 1.205 kg/m3.
4.1.1.3 Solution
Since the total mass is calculated as 24,900 kg (= 16,500 kg + 7,888 kg + 64 kg × 8), the underwater pontoon volume (V) becomes 24.9 m3. Then, the total weight (W) is 244,020 N (24.9 m3 × 1,000 kg/m3 × 9.8 m/s2). The schematic elevational view of the floating house is shown in Fig. 11.

Schematic elevational view of a floating house
4.1.1.4 Calculation of the Total Overturning Moment \(\left( {\sum\nolimits_{\text{i}} {{\text{M}}_{\text{i}} } } \right)\)
-
The overturning moment around the KG due to the movement of eight persons is
$${\text{M}}_{P} = 64.0\,{\text{kg}} \times 9.8\,{\text{m}}/{\text{s}}^{2} \times 8\;{\text{ persons}} \times 2.26\,{\text{m}} = {11,340}\,{\text{N m}}$$(9) -
The wind heeling moment is (Mw) = 4,200 N m (given)
-
Since the total horizontal force on the platform (wind) is 6,000 N (given), the reaction force of the pile has the same value. Then, the moment around the KG due to the reaction force of the pile at the leeward side (MR) becomes
$${\text{M}}_{R} = 6 ,000\,{\text{N}} \times 0.8\,{\text{m}} = 4 ,800\,{\text{N m}}$$(10)where the vertical distance between the KG and the pile reaction location (lever) is 0.8 m (= KG − 1.5 m).
-
Finally, the total overturning moments \(\left( {\sum\nolimits_{\text{i}} {{\text{M}}_{\text{i}} } } \right)\) are calculated as follows:
$$\begin{aligned} \sum\limits_{{\text{i}}} {{\text{M}}_{{\text{i}}} } & = 4,200{\mkern 1mu} {\text{N m}}\;\left( {{\text{wind}}} \right) + 4,800{\mkern 1mu} {\text{N m}}\;\left( {{\text{pile}}} \right) + 11,340{\mkern 1mu} {\text{N m}}\;\left( {{\text{people}}} \right) \\ & = 20,340{\mkern 1mu} {\text{N m}} \\ \end{aligned}$$(11) -
The “Required GM” value can be obtained by using Eq. (8) as follows:
Here, the ϕ value is given as 1.5° from the beginning.
$${\text{Req. GM}}\;\left( {1.5^{\circ}} \right) = \frac{{20,340\,{\text{N m}}}}{{244 ,020\,{\text{N}}\cdot \sin \;\left( {1.5^{\circ}} \right)}} = 3.18\;{\text{m}}$$(12)
4.1.1.5 Parameter Update Process
-
First trial:
The initial length L1 (tentative) is set to 5 m and thus the draft (d1) becomes 0.996 m.
(Here, the value of underwater volume (V) is given as 24.9 m3.)
Then, the KB location 1 becomes 0.498 m.
-
The KM value is then obtained by summing the KG (2.3 m) and the \(\overline{\text{GM}}\) (3.18 m), and is thus 5.48 m.
Here, for simplicity, the KG value is assumed not to change.
-
Accordingly, the \(\overline{\text{BM}}\) value (= KM − KB) becomes 4.982 m, and the moment of inertia can then be calculated as follows:
$${\text{I}}_{y} = \overline{\text{BM}} \times {\text{V}} = 4.982 \,{\text{m}} \times 24.9 \,{\text{m}}^{3} = 124.0518\,{\text{m}}^{4}$$(13) -
Since the moment of inertia (Iy) is 124.0518 m4, L2 becomes 6.2115 m instead of 5.0 m using the relation shown in Eq. (6) while the draft (d2) becomes 0.8017 m and the new KB location becomes 0.4009 m (see Table 2).
Table 2 Repeated trials for length (L) and depth (d) for a floating house -
The trials are repeated until convergence is obtained.
4.1.1.6 Calculations of Wind Velocity and Force
Since the wind velocity U10 is given as 20 m/s at the height of 10 m for this case study, the wind velocity at 2.25 m high (= 1.5/2 m + 3.0/2 m) becomes 16.16 m/s from the following computation, which is described in Appendix A.
Next, the wind force (FW) is calculated assuming that the drag coefficient (CD) is 2.034.
4.1.2 On the Design of Singapore Water City
If constructed, the Singapore Water City project would cover approximately 105.8 ha, have a length of 2,190 m, a width of 483 m, and an average water depth of about 25 m (see Figs. 12 and 13). As part of this project, three 51-story high-rise towers, in which 48 floors of each building would be residential space, would be constructed on the same floating foundation composed of three square-shaped pontoons (or floating modular units) (see Fig. 14).

Plan view of artificial reservoir

Bird’s eye view of “Singapore Water City”

Elevational view of high-rise towers on a floating foundation
The total number of households and the population of the three residential towers would be nearly 2,260 and 8,100, respectively. The total living space in the three residential towers would be approximately 372,960 m2. We firmly believe that building semi-floating water cities of this type, which could house numerous high-rise towers, would effectively mitigate Singapore’s ongoing land shortage while also alleviating the pressures of the city’s growing population. An accurate assessment of the stability of a floating water city is a fundamental requirement for ensuring its safety, especially when considering the construction of high-rise towers on a floating foundation. As high-rise towers will be subjected to the highest levels of wind intensity, calculations of the static stability and inclination of these towers are crucially important.
The total weight of three 51-story high-rise towers that are 210 m high and 60 m wide is estimated at approximately 529,200 ton-force (tf) by assuming the unit weight of 1.33 tf/m2. The deadweight sum of the three pontoons (or floating modular units) is 146,880 tf based on the specific weight of 0.167 tf/m3, which was obtained from measurements taken during the “Mega-float Project” [7, 8]. It follows that the weight of the pontoon of the Singapore Water City project would be 676,080 tf, plus variable loads of approximately 39,420 tf, while the total underwater volume (V) would be 715,500 m3. The \(\overline{\text{BM}}\) and \(\overline{\text{GM}}\) values for this project are calculated as 348.2 m and 257.5 m, respectively, while the vertical location of the center of gravity (KG) for these floating systems is 103.1 m.
Next, assuming a drag coefficient of 2.0 and a maximum wind intensity of 60 m/s at 105 m above the water level, the total wind force on the three high-rise towers is calculated to be 163,976.4 kN [4]. Furthermore, the corresponding total wind heeling moment is calculated as 17,217,522 kN m [4].
The coordinate system is shown in Fig. 15 while the inclined condition of a floating foundation is shown in Fig. 16. The pontoon freeboard is designed to be 2.0 m while the ϕ value of the floating foundation is set to be 0.55° under serious conditions involving a wind velocity of 60 m/s. Here, the ϕ value of 0.55° is considered to be the flooding angle at which the upper deck end of the floating foundation reaches the maximum calm water level, and is thus chosen for safety to be the inclination limit.

Coordinate system of a floating foundation

Inclination of a floating foundation
As is shown in Fig. 17, height of a super high-rise tower (condominium) is 210 m while the width is 60 m. On the other hand, the underwater volume (V) for 3 pontoons (715,500 m3) is expressed as follows:

Principal dimensions of 51-story high-rise tower on a pontoon
Here, Vadd is the volume of the additional bottom buoyancy unit (see Fig. 17), and B = L.
4.1.2.1 Problem
To find the length (L) and the draft (d) of each pontoon when the ϕ value is 0.55° under a wind velocity of 60 m/s with the following given values:
-
KG: 103.115 m (fixed)
-
Underwater volume (V): 715,500 m3 (fixed)
-
Wind heeling moment (Mw): 17,217,522 kN m (fixed)
4.1.2.2 Solution
-
The “Required GM” value can be obtained by Eq. (8) as follows:
Here, the ϕ value is given as 0.55°.
$$\begin{aligned} {\text{Req. GM}}\;(0.55^{ \circ } ) & = \frac{{17,217,522\,{\text{kN}}\,{\text{m}}}}{{715,500\,{\text{m}}^{3} \times 9.8\,{\text{m}}/{\text{s}}^{2} \cdot \sin 0.55^{ \circ } }} \\ & = 255.800\,{\text{m}} \\ \end{aligned}$$(18)Then, the KM \(\left( { = {\text{KG}} + \overline{\text{GM}} } \right)\) becomes 358.915 m (= 103.115 m + 255.8 m).
4.1.2.3 Parameter Update Process
-
First trial: The initial length L1 (tentative) is set to 100.0 m with a underwater volume (V) of 715,500 m3, and the draft d1 becomes 18.225 m.
Then, the KB location 1 becomes 15.7840 m.
-
Accordingly, the \(\overline{\text{BM}}\) (= KM − KB) becomes 343.131 m (= 358.915 m − 15.7840 m).
-
Then, the moment of inertia Ix can be calculated as follows:
$${\text{Ix}} = \overline{\text{BM}} \times {\text{V}} = 343.131 \,{\text{m}} \times 715 ,500\,{\text{m}}^{3} = 245 ,510 ,230.5 \,{\text{m}}^{4}$$(19) -
Since the moment of inertia (Ix) is 245,510,230.5 m4, the second estimation of length L2 becomes 134.5092 m using the relation shown in Eq. (6), and the draft (d2) becomes 10.0731 m. Then, the KB location 2 changes to 12.6694 m (see Table 3).
Table 3 Repeated trials for length (L) and depth (d) for “Singapore Water City” -
The trials are repeated until convergence is obtained.
From these computational results, the final dimensions of the L and d of a pontoon are determined to be 135 m and 10 m, respectively.
5 Concluding Remarks
Looking a century or more into the future, the most important keyword used in relation to urban areas will undoubtedly be “sustainability,” which is a concept that covers all the actions of humankind and the necessity of making efforts to build urban areas that are capable of withstanding global environmental hazards [8]. The authors believe that the adoption of floating solutions in urban areas can provide solutions to most water-related environmental hazards, and thus has the potential to create a future style for cities worldwide. However, because there are major differences in the purposes and/or missions of floating platform types, it will be difficult to design floating platforms for civil purposes if the process is restricted to applying current technology and established designs, such as those used in the offshore floating platforms operated by the oil industry [9]. Therefore, to minimize these difficulties, the authors have introduced a practical and useful process for designing floating structures destined for civil use. In terms of safety, the most important part of this process is avoiding large inclinations and establishing adequate static stability under the various simultaneous multi-loading conditions that floating structures can be expected to experience.
To develop a practical method for calculating the static stability of a floating structure while aiming to ensure the comfort and safety of its residents, we formulated a process based on tools of the so-called “Required GM” method, which was originally developed for semi-submersible type oil rigs in the harsh environments of the open sea [6]. In this paper, the floating foundation problem was considered in a general fashion, and methods used in the process were presented and discussed along with some useful studies on static stability. Finally, we proposed a computation design process that adequately considers principal dimensions (such as length, width, and draft) at the initial planning stage.
This paper presented two parts with different aspects. The first was basic knowledge on static stability in relation to the overall design process at the conceptual design stage, while the second discussed practical trials for determining the basic configurations of two floating structure types. In the first part, the importance of both the \(\overline{\text{GM}}\) and KM values in maintaining appropriate stability levels for floating structures was confirmed via comparisons among calculated results. From these results, it was found that the KG location has a considerable effect on the inclining angle and that the \(\overline{\text{GM}}\) value is the critical factor governing the inclination of a floating platform. In the second part, two study cases, one involving small-sized floating houses and the other showing large high-density floating residences, were presented as practical trial examples. The presented results show that our proposed basic planning and design methodology is imminently applicable to various floating structure types. The authors hope that architects and/or engineers will find our proposed design procedure, as well as the floating architectures studies set forth in this paper, to be of practical use.
References
Intergovernmental Panel on Climate Change (2014) IPCC fifth assessment report—climate change 2014. Intergovernmental Panel on Climate Change
Nakajima T, Umeyama M (2019) An integrated floating community based upon a hybrid water system: toward a super-sustainable water city. Lecture notes in civil engineering, vol 41. Springer, Heidelberg, pp 309–327
Nakajima T, Umeyama M (2015) A new concept for the safety of low-lying land areas from natural disasters. J Ocean Eng Mar Energy 1(1):19–29 (Springer)
Nakajima T, Yamashita Y, Harada S, Andoh (2020) Sustainable water city in Singapore. In: Oceans’20 MTS/IEEE international symposium Singapore, 11–14 August (to be published)
Maarten K (2010) Connecting modular floating structures. TU Delft M.S. thesis, A7-3 A9-8
Takarada N, Nakajima T, Inoue R (1986) A phenomenon of large steady tilt of a semisubmersible platform in combined environmental loadings. In: 3rd international conference on stability of ships and ocean vehicles, 22–26 September 1986, Gdansk
Sato C (2003) Result of 6 years’ research project of mega-float. Ocean space utilization technology. Ministry of Land, Infrastructure and Transport of Japan, pp 436–442
Nakajima T, Umeyama M (2013) Water city as solution to escalating sea level rise in lower-lying areas. In: Oceans’13 MTS/IEEE international symposium, San Diego, California, 23–26 September 2013
Hendriks TM, Mendonca Santos J (2018) Challenges in stability assessment of offshore floating structures. In: Guedes Soares, Teixeira (eds) Maritime transportation and harvesting of sea resources, October 2017. Taylor & Francis Group, London, p 13. ISBN 978-0-8153-7993
Acknowledgements
The authors are grateful to Business Strategy Promotion Center at Chodai Co., Ltd., for their financial support. Some of the content within this paper was quoted from work conducted by Ms. Yuka Saito, which was carried out as research in support of her thesis presented at Tokyo Metropolitan University during the 2015–16 period.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendices
Appendix A
In general, steady wind force \(\left( {\Delta {\text{F}}_{\text{Z}} } \right)\) at z m can be obtained by the following equation:
where PZ is the wind pressure (kg/m2) at z m, CD is a drag coefficient, A is the projected area (m2), and ρ is the air density.
In general, accurate CD values are obtained via wind tunnel tests.
Here, it should be note that wind velocity is measured at the height of 10 m and the average value over a period of 10 min is used. The wind velocity (UZ) changes along the vertical location are shown in Fig. 18, and can be estimated by the following equation. Note that wind velocity is lower near the ground due to friction.
where U10 is the wind velocity at a height of 10 m, and α is the surface roughness.

Schematic view of wind speed
It is known that the value of α is 1/7 on the sea surface and 1/4 in an urban area.
Appendix B
According to Ref. [6], the static righting lever GZ at an inclining angle φ of a wall sided vessel is expressed as follows:
Supposing an overturning moment due to the sum of various components \(\left( {\sum\nolimits_{\text{i}} {{\text{M}}_{\text{i}} } } \right)\) and the righting moment (MR), the following expression is established:
Equation (22) is then multiplied by the weight of a floating foundation (W) to give
After rearranging, we have
Dividing Eq. (25) by \({\text{W}} \cdot \sin \phi\) on both sides gives
When \(\phi\) is small, the second term of Eq. (26) can be ignored. Thus, the value of the \(\overline{\text{GM}}\) which is required (Req. GM) for a small inclination is given by the following equation:
or
where \(\Phi {\text{d}}\) is the inclining angle in degrees.
Thus, a “required GM” method that evaluates and compensates for various heeling moments under a variety of combined environmental loadings is proposed.
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Nakajima, T., Saito, Y., Umeyama, M. (2022). A Study on Stability of Floating Architecture and Its Design Methodology . In: Piątek, Ł., Lim, S.H., Wang, C.M., de Graaf-van Dinther, R. (eds) WCFS2020. Lecture Notes in Civil Engineering, vol 158. Springer, Singapore. https://doi.org/10.1007/978-981-16-2256-4_17
Download citation
DOI: https://doi.org/10.1007/978-981-16-2256-4_17
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-2255-7
Online ISBN: 978-981-16-2256-4
eBook Packages: EngineeringEngineering (R0)