
Abstract
This paper discusses a control strategy that allows maximum energy extraction from a variable speed wind power conversion system based on a sliding mode extremum seeking control scheme. The main purpose is to supply 230 V/60 Hz domestic appliances through a single-phase inverter. The required power can be effectively supplied by the proposed wind turbine with the proposed MPPT controller. This MPPT system allows to changes the VDC reference signal (VdcRef) of the inverter VDC regulator. A second controller regulates the DC link voltage to its reference value and the third controller regulates active and reactive grid current components. The active current reference is the output of the DC voltage controller. The simulation of the system operating in variable wind conditions shows the performance of the developed MPPT controller based on the sliding mode extremum seeking control algorithm.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
52.1 Introduction
Many remote communities throughout the world are supplied with electrical energy produced by diesel generators. In many of these communities, the cost of energy is largely determined by the landed cost of the diesel fuel. The urgent need to reduce the cost of energy has led to the investigation of the use of renewable energy sources, such as the wind, to replace some or all of the fuel consumed [1].
Small wind turbines (SWT) are defined as wind turbines not exceeding 50 kW and which can be installed near inhabited areas where large-scale wind turbines cannot be built. In countries where high wind speeds are common, renewable electricity generating systems are gaining ground in residential sector for the purpose of diminishing the electricity bills or to reaching some degree of energy independence. Indeed on both on and off the grid, wind energy system can help houses become energy self-sufficient by generating electricity on site using clean, quiet, reliable and sustainable technology [2].
The most common configuration for residential wind -grid-connected systems of powers less than 50 kW normally consist of permanent magnet synchronous generator (PMSG) feeding a three phase rectifier followed by a residential grid system connected single phase AC inverter [1, 3].
The most critical and complex part of the AC grid-connected residential wind system is the control of the voltage amplitude at the terminals of the PMSG while allowing a maximum power transfer. Generally, there are three traditional types of the wind MPPT techniques: (1) Power Curve Characteristic Control, (2) tip speed ratio control, and (3) perturbation and observation (P&O) control [4, 5]. The first two methods have got a better dynamic response making them suitable for situations of rapid wind variations. On the other hand, the third method is parameter independent, simple to implement and can be applied more to a wide range of different types of SWTs [2].
In this paper, the Sliding Mode Extremum Seeking Control (SM-ESC) scheme [6, 7] was proposed to maximize the output power capture from wind generation system. SM-ESC is a non-model-based self-optimizing control strategy that aims to search for unknown input in real-time varying systems by finding the extreme point. This work discusses the control of the VDC reference signal of the VDC controller of the inverter based on sliding mode extremum seeking control scheme. The proposed MPPT controller automatically varies the VDC reference signal of the inverter’s to obtain a DC voltage that will extract the maximum of the power wind.
This paper is organized as follows. In Sect. 2, the system under study is described. The sliding mode extremum seeking controller design is presented in Sect. 3. In Sect. 4, the proposed control is validated by means of simulation. Finally, the conclusions are summarized in Sect. 5.
52.2 System Structure
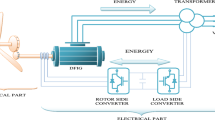
The block diagram of the proposed system is illustrated in Fig. 52.1. The residential wind turbine system entails of a wind turbine, an inverter control module, a residential load and a distribution network.

General block diagram of a single-stage single-phase wind topology
As illustrated in Fig. 52.1, the major components include: the wind turbine, PMSG, rectifiers, and MPPT controller; VDC Regulator: Determine the required Id (active current) reference for the current regulator; Current Regulator: The regulation defines the intended reference voltages for the inverter; PLL is used for synchronization; PWM Generator.
The output power of the wind-turbine is described as [8]:
where, \(\rho\) is the air density ( kg/m3), R is the blade radius (m), CP is the performance coefficient of the turbine which is a function of the pitch angle of rotor blades β (in degrees) and v is the wind speed (in m/s). The tip-speed ratio λ is given by:
where \(\omega_{m}\) is the wind turbine rotor speed (in rad/s). The mechanical torque output of the wind turbine Tm is given as:
The coefficient of power conversion Cp (λ,β) is described in [8] as:
The coefficient c1 to c6 are: c1 = 0.5176, c2 = 116, c3 = 0.4, c4 = 5, c5 = 21 and c6 = 0.0068. The coefficient of power conversion and the power are maximums at a certain value of tip speed ratio called optimum tip speed ratio λopt [9, 10].
52.3 Sliding Mode Extremum Seeking Control for Wind MPPT
The Maximum Power Point Tracking (MPPT) controller is based on sliding mode extremum seeking algorithm. This MPPT system allows to changes the VDC reference signal (V dcRef) of the inverter VDC regulator in order to draw the maximum of the power wind which mean that Cp reached the Cpmax.
The objective of the sliding mode extremum-seeking controller (Fig. 52.2a) is to steer the cost function of the system to follow a non-predetermined optimal operating point (the maximum (minimum)). The optimal operating point in our case is the maximum point of the output power of the wind turbine ( Fig. 52.2b).

Block diagram and the cost function characteristic curve of wind turbine generator of sliding mode extremum seeking control algorithm
The sliding variable s(t) is defined as:
where y(t) is the cost function, g(t) is a function satisfying \(\dot{g}\left( {t \, } \right) = \rho\), with ρ is a positive constant. The parameter θ is designed to satisfy:
where K and α are positive constants.
52.4 Simulations Results
The simulation considered the operation of the SWT connected to residential system operating at 230 V/60 Hz and with varying wind speed conditions.
Performance of the of generator side control is carried out with different wind velocities as shown in Fig. 52.3.

Performance of generator side control
It is evident from the results that the generator speed increases with an increase in wind velocity and vice versa (Fig. 52.3). The wind power coefficient is tuned under the wind speed variation as illustrated in Fig. 52.3.
The DC-link power and voltage are illustrated in Fig. 52.4. The DC-link voltage is maintained at 425 V under the wind speed variation.

Performance in DC-link
Figure 52.5 represents the residential load voltage and the residential load current. The total harmonic distortions (THD) of the residential load voltage current are shown in Fig. 52.6. The Fig. 52.7 shows the wind and the active power of the residential load. The difference in the curves represents the losses in the converter.

Residential load voltage and current

Voltage and current harmonics spectra of residential load

Active power of the residential load
52.5 Conclusion
In this paper, sliding mode extremum seeking controller is proposed to regulate the VDC reference signal of the inverter VDC structure. The developed control strategy is checked via simulation studies on wind turbine system for residential application. The performance of system has been demonstrated under varying wind conditions. The voltage THD and the current THD of the residential load meet the required power quality norms recommended by IEEE. It is finally shown that the results proved the effectiveness of the employed control strategies.
References
L. Barote, C. Marinescu, PMSG wind turbine system for residential applications, in SPEEDAM 2010 International Symposium on Power Electronics,Electrical Drives, Automation and Motion, pp.772–777 (2020)
D. Zammit, C. Spiteri Staines, A. Micallef, M. Apap, MPPT with current control for a PMSG small wind turbine in a grid-connected DC microgrid, in TUrbWind 2017 (Research and Innovation on Wind Energy Exploitation in Urban Environment) Colloquium, Riva del Garda, Italy (2017)
L. Bisenieks, D. Vinnikov, I. Galkin, Wind turbines: PMSG based residential possibilities and challenges, in Agronomy Research, pp. 295–306 (2013)
R. Kot, M. Rolak, M. Malinowski, Comparison of maximum peak power tracking algorithms for a small wind turbine. Elsevier J. Math. Comput. Simul., 29–40 (2013)
M.A. Abdullaha, A.H.M. Yatima, C.W. Tana, R. Saidurb, A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 3220–3227 (2012)
D. Shen, P. Khayyer, A. Izadian, Sliding mode extremum seeking control for maximum power point tracking in wind system, in IEEE Power Energy Conf Illinois IEEE, pp. 1–6 (2016)
M. Safanah, R.H. Rafaat, Power maximization and control of variable-speed wind turbine system using extremum seeking. J. Power Energy Eng. 1–7 (2018)
K. Patil, B. Mehta, Modeling and control of variable speed wind turbine with permanent magnet synchronous generator, in IEEE International Conference on Advances in Green Energy (ICAGE’14), pp. 1–7 (2017)
Y. Erramia, M. Ouassaid, M. Maaroufia, Control of a PMSG based wind energy generation system for power maximization and grid fault conditions, in Energy Procedia: Mediterranean Green Energy Forum MGEF-13, pp. 220–229 (2013)
Y. Xia, K.H. Ahmed, B.W. Williams, A new maximum power point tracking technique for permanent magnet synchronous generator based wind energy conversion system, in IEEE Transation on Power Electronics, pp. 3609–3622 (2011)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Abbadi, A., Hamidia, F., Chiba, Y., Tlemcani, A. (2021). Maximum Power Point Tracking Method Using Sliding Mode Extremum-Seeking Algorithm for Residential Wind Turbine. In: Chiba, Y., Tlemçani, A., Smaili, A. (eds) Advances in Green Energies and Materials Technology. Springer Proceedings in Energy. Springer, Singapore. https://doi.org/10.1007/978-981-16-0378-5_52
Download citation
DOI: https://doi.org/10.1007/978-981-16-0378-5_52
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-0377-8
Online ISBN: 978-981-16-0378-5
eBook Packages: EnergyEnergy (R0)