
Abstract
This paper proposes a novel edge-detection, edge preservation and smoothening filter for infrared images. The proposed method consists of two steps: extracting the edges of Infrared (IR) image using modified canny operator and edge-preserving and smoothening using bilateral/guided filter. Experimental result shows the effectiveness of the proposed method in terms of the visual quality.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Infrared (IR) image
- Canny operator
- Edge-detection
- Edge-preservation
- Smoothening
- Bilateral filter
- Gradient reversal
- Guided filter
1 Introduction
Infrared image is a thermal visualization of scene consisting of target and background. With several physical and operational restraints in the execution of infrared sensors and phenomenal influence of the environment, most IR images captured have certain degradations in image quality, which needs to be addressed. One such degradation is the edge blurring. The blurred image features such as edges or textures and a low-contrast target and background heavily affect the visual appearance of IR image. Therefore, in order to improve the visual quality of IR image and to enhance the detail information, it is imperative to study different types of edge detection and detail enhancement methods. Then, select one of these methods and apply over infrared image. In this paper, canny edge detection algorithm, bilateral filter and guided filter are comparatively discussed and Guided filter is chosen to be incorporated in this novel proposed algorithm. The new edge-detection, edge preservation and smoothening filter algorithm proposed is applied over real time field database captured in Indian tropical climatic conditions. The qualitative results are generated using MATLAB® simulation software and reported. Quantitative evaluation of the scheme is discussed and finally conclusions are presented.
2 Background
2.1 Canny Operator Theory
Canny has given a specific method of edge detection, which is one of the best methods in earlier known step-type edge detection methods. It is affected by white noise. We know that the first-order derivative of Gaussian function is Canny edge detector [1]. Gaussian function has circular symmetry by nature, so which automatically means Canny operator is symmetrical on horizontal edge, and dissymmetrical on vertical edge’s direction.
2.2 Guided Filter
Bilateral filter has gained popularity but it has some drawbacks too. As reported in [2,3,4], the “gradient reversal” artifacts are quite visible in bilateral filter. Instability arises, in turn, due to similar pixels surrounding a pixel mainly at an edge. So, its Gaussian weighted average is no longer stable. Consequently, it causes shadowing like features around edges which make it visually imperfect. In guided filter, a guidance image is taken and the linear transformation results in output image. So, it imbibes good edge-preserving qualities, unlike bilateral filter, and also does not cause “gradient reversal” artifacts. It also smoothens the image. With the help of guidance image, output image becomes more discernible and appealing to visual observation. The guided filter has several applications in infrared image enhancement, deblurring, compression, flash detection, fog effect removal etc.
2.3 Proposed Method
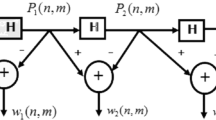
In this paper, IR image (or reference image) is first passed through modified canny operator (i.e. modified using otsu technique) so edges are obtained, and these edges are subjected to later fusion with the output image obtained through guided filter processing. Guided filter smoothens the detail and preserves the edges. This overall process detects edges, preserves them and smoothens out the unnecessary details to provide a resultant improved image. To obtain the result, hardware circuit GP-GPU (General Purpose-Graphical Processing Unit) kit is being used and the display used which shows the output result is TOTE VISION. The flowchart of proposed method is (Fig. 74.1).

Algorithmic flowchart of proposed method
The comparison between the filtered output image and the input image is given in terms of MSE (mean square error), PSNR (peak signal to noise ratio) and entropy (Table 74.1).
Hence, the result for the filters with the detected edges overlapped shows high value of Entropy and MSE which means that the result has more detail information as compared to results which were obtained directly from other filters (Fig. 74.2).

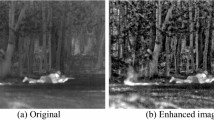
a Input image, b output image with better visual quality
3 Conclusion
In this proposed algorithm, it can be deduced that the output image obtained is more visually clear and distinguishable with respect to input image and contain less noise as compared to input image. By using the bilateral filter and guided filter the edges are preserved and smoothed but the disadvantage of bilateral filter is overcome to great extent by using guided filter in the proposed algorithm.
References
J.F. Canny, A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 8(6), 679–698 (1986)
N.A. Ostu, Threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 9(1), 62–66 (1979)
K. He, Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 35 (2013)
Q. Zeng, H. Qin, H. Leng, X. Yan, Adaptive detail enhancement based on bilateral filter. Proc. SPIE 9675, 96752
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Singh, H., Pant, M., Khare, S. (2021). Infrared Image Quality Improvement Through Guided Filter Based Novel Edge-Detection, Edge-Preservation and Smoothening Filter Algorithm. In: Singh, K., Gupta, A.K., Khare, S., Dixit, N., Pant, K. (eds) ICOL-2019. Springer Proceedings in Physics, vol 258. Springer, Singapore. https://doi.org/10.1007/978-981-15-9259-1_74
Download citation
DOI: https://doi.org/10.1007/978-981-15-9259-1_74
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-9258-4
Online ISBN: 978-981-15-9259-1
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)