
Abstract
The work presents two levels Voltage Source Inverter (VSI) fed Direct Torque Control (DTC) of Asymmetrical 6-phase Induction Motor (A6PIM) for electrical drives applications. The proposed control strategy has very fast torque control and is more efficient and commonly used technique for AC machine drives. In order to meet the needs of 6-phase industrial drive, the model uses modified Space Vector Modulation (mSVM) technique to maintain the switching frequency constant by means of which switching losses are kept fixed. The simulation results forecast and validate the efficacy of the proposed method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The machine with high phase order, greater than three, increases the rating and power handling capability of a drives system. The drives with more number of phases in the stator of the machine are called multiphase drives. These multiphase drives possess various potential benefits over its three-phase counterparts, such as increase in frequency of torque pulsation by reducing the amplitude of pulsating torque, lowering per phase current without increase in voltage per phase, reduces the rotor and D.C link current harmonics, posses high fault tolerant capability. As an effect of which if a fault occurs in one or more phases the machine will continue to run without any interruption [1]. The Six-Phase Induction Machine (SPIM) is more commonly used multiphase machine and is also known as the dual star induction machine. Such type of machine is used where high power is required, as in case of aircraft applications, electric/hybrid vehicles, naval system, mine hoist, cement mills, rolling mills [2].
In the mid of 1980 I. Takahashi first proposed the direct torque control (DTC) of induction machine [3], this control strategy is highly efficient and more commonly used for AC machine drives system to provide quick flux and torque control. The DTC control strategy proposed here is based on the principle of rectifying error between the estimated values and the required values of corresponding torque and flux, the different states of two-level VSI are directly controlled to reduce the errors of flux and torque in between the band limits [4, 5].
The work presented in this paper is discussed in five sections. The second section presents phase arrangement of A6PIM. Whereas the DTC based control strategy is implemented in section three. The results of simulation are discussed in section four. Finally, the summary of the work is made in conclusion.
2 A6PIM Phasor
The model implemented for the analysis, consists of two sets of six phases winding on the stator with a phase shift of 120o and displaced by an angle α. The rotor winding of 6-phase motor is same as that of its three-phase counterparts [6, 7]. The motor under consideration has no friction and windage losses and is also free from magnetic saturation of the core. The stator winding of a six-phase motor has two sets of winding, namely, ‘abc and xyz’, and their axes are phase displaced by α = 30o [8, 9]. The rotor windings ar, br, cr as shown in Fig. 1 has sinusoidal distribution with the phase displacement of 120°.

Generalized phasor representation of a multiphase machine
3 Direct Torque Control
As the name indicate, DTC allows control of flux and electromagnetic torque directly and independently by selecting proper switching vector [10, 11]. Figure 2 represents the basic blocks of modified DTC method implemented to A6PIM. The reference values of torque (Te*) and flux (Φs*) are analyzed with the obtained values and the resultant errors are fed into a PI controller which allows the control of the motor in both directions of rotation.

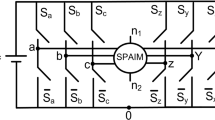
Conventional DTC of SPIM
The idea of the DTC is to lower the value of errors in flux and torque between the specified hysteresis band of torque and flux by the proper selection of switching state of two levels inverter as shown in Table 1. In six-phase VSI, there are 64 states for switching that each state generates a voltage vector. In other words, there are 64 voltage vectors for the inverter. These voltage vectors can be shown in (x, y) and (d–q) planes. Projecting the 64 voltage vectors in (x, y) plane, vectors with different lengths are appeared in this plane. In fact, the length of the switching vectors in (x, y) plane can be classified into four different sizes [12]. To obtain larger voltage amplitude, only switching vectors with largest size are selected in (x, y) plane [13, 14]. Figure 3 shows the projection of these 12 vectors in (d, q) and (x, y) planes. The numbers written near the vectors represent the state of the six-phase VSI, when these numbers are converted to binary, six bits are obtained. Each zero/one in these binary numbers is corresponded to a switch in the related inverter leg.

a d–q axis and b x–y axis of voltage vectors [13]
The number zero means the lower switch is on and the number one means the upper switch is on. These vectors have the smallest lengths among vectors in (x, y) plane which decreases (d, q) voltage components; however, it is not enough a small amount of (x, y) voltage components results in large current of their axis. The DTC strategy should enforce (x, y) voltage components to become almost zero. If the flux and torque errors are increased, then the switching vector of the voltage is selected in such a way so that there is increase in stator magnitude and flux angle. Representation of space vectors of the voltage in d–q and x–y axis are illustrated in Fig. 3. All the space vectors of voltage that are active are categorized on the basis of their magnitude into four different groups (D1, D2, D3, and D4), where D1 is classified as the group of largest magnitude vectors and D4 is classified as the group of smallest magnitude vectors. Vectors of the same group in d–q subspace fall in the same group of x–y sub-space, for example, D1 of d–q falls in D1 of x–y and vice versa. Similarly D2 and D3 in d–q subspace fall in D2 and D3 of x–y subspace, respectively.
4 Result of Simulation
The result of the proposed direct torque control is presented in this section where A6PIM operates at a speed of 1p.u and a load torque of 1.5 p.u under steady-state condition is illustrated in respective Fig. 4 and Fig. 5. Waveform of phase current (Ia) with THD of 35.46% with respect to reference voltage (Vr) is shown in Fig. 6. By observing the current waveform it has been found that the current harmonics of the order 5thand 7th are present in proposed method. Figure 7 shows the ripple contain in power of the A6PIM under steady-state condition.

Steady-state torque

Speed under steady state

Current waveforms of phases ‘a’

Ripple contain in power
5 Conclusion
DTC of an asymmetrical multiphase 6-phase induction machine is proposed in this work. The proposed technique uses modified SVM to reduce the Total Harmonic Distortion around the acceptable limits, as obtained from commonly used conventional technique. The value of currents in x–y subspace is plotted. Vectors of groups D1 and D2 are formed by assigning proper times. The proposed method is free from switching sequence and no designed is required and dynamic behavior of the machine remains unchanged.
References
E. Levi, R. Bojoi, F. Profumo, H. Toliyat, S. Williamson, Multiphase induction motor drives—a technology status review. IET Electr. Power Appl. 1(4), 489–516 (2007)
E. Levi, Multiphase electric machines for variable-speed applications. IEEE Trans. Industr. Electron. 55(5), 1893–1909 (2008)
I. Takahashi, T. Noguchi, A new quick-response and high-efficiency control strategy of an induction motor. IEEE Trans. Ind. Appl. IA-22(5), 820–827 (1986)
E. Levi, Advances in converter control and innovative exploitation of additional degrees of freedom for multiphase machines. IEEE Trans. Ind. Electron. 63(1), 433–448 (2016)
V. Rathore, K.B. Yadav, Analytical Model Based Performance Characteristics Analysis of Six-Phase Induction Motor. SSRN 3575381, April 2020
V. Rathore, M. Dubey, Speed control of asynchronous motor using space vector PWM technique international. J. Electr. Eng. Technol. (IJEET) 3, 222–233 (2012)
K. Hatua, V. Ranganathan, Direct torque control schemes for split phase induction machine. IEEE Trans. Ind. Appl. 41(5), 1243–1254 (2005)
K.D. Hoang, Y. Ren, Z.-Q. Zhu, M. Foster, Modified switching table strategy for reduction of current harmonics in direct torque controlled dual-three-phase permanent magnet synchronous machine drives. IET Electr. Power Appl. 9(1), 10–19 (2015)
A.K. Mohanty, K.B. Yadav, Simulation based analytical investigation of multi-phase induction machine in motoring and generating mode. Int. J. Eng. Technol. (IJET) 8(6), 2319–8613 (2017)
G. Boukhalfa, S. Belkacem, A. Chikhi, S. Benaggoune, Direct torque control of dual star induction motor using a fuzzy-PSO hybrid approach. Appl. Comput. Inf. (2018)
Y. Ren, Z. Zhu, Enhancement of steady-state performance in direct torque- controlled dual three-phase permanent-magnet synchronous machine drives with modified switching table. IEEE Trans. Industr. Electron. 62(6), 3338–3350 (2015)
Y. Ren, Z. Zhu, Reduction of both harmonic current and torque ripple for dual three-phase permanent magnet synchronous machine using modified switching-table-based direct torque control. IEEE Trans. Industr. Electron. 62(11), 6671–6683 (2015)
J.K. Pandit, M.V. Aware, R. Nemade, E. Levi, Direct torque control scheme for a six-phase induction motor with reduced torque ripple. IEEE Trans. Power Electron. 32(9), 7118–7129 (2016)
J.K. Pandit, M.V. Aware, R. Nemade, Y. Tatte, Direct torque control of asymmetric six-phase induction motor with reduction in current harmonics, in IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES) (IEEE, 2016), pp. 1–6
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
Parameters and ratings of symmetrical six-phase induction motor under test
Poles (P) | 2 | Moment of inertia (J) | 0.0030 Kg m2 |
|---|---|---|---|
Stator and rotor resistance (rs and rr) | 11.5 & 10.4 O | Power | 1 HP |
Frequency (f) | 50 Hz | Mutual inductance (Lm) | 550.7 mH |
Speed (ωref) | 1450 rpm | Stator and rotor inductance (Ls, Lr) | 579.17 mH |
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Rathore, V., Yadav, K.B. (2021). Direct Torque Control of Asymmetrical Multiphase (6-Phase) Induction Motor Using Modified Space Vector Modulation. In: Kumar, J., Jena, P. (eds) Recent Advances in Power Electronics and Drives. Lecture Notes in Electrical Engineering, vol 707. Springer, Singapore. https://doi.org/10.1007/978-981-15-8586-9_45
Download citation
DOI: https://doi.org/10.1007/978-981-15-8586-9_45
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-8585-2
Online ISBN: 978-981-15-8586-9
eBook Packages: EnergyEnergy (R0)