
Abstract
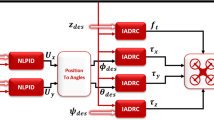
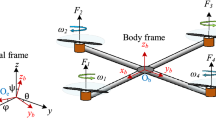
The six degrees of freedom (6-DOF) trajectory planning of quadrotors with attitude constraints is studied. Based on active disturbance rejection control (ADRC) technology, a controller for quadrotors that can track both position and attitude is designed. Firstly, the nonlinear dynamic model of quadrotors is established. Next, the optimal trajectory with attitude constraints is solved under different performance indexes. Finally, based on ADRC method, a 6-DOF tracking control algorithm for quadrotors is designed. The control effect is simulated and compared with the traditional linear control method. The results indicate that ADRC method has superior control accuracy and stability for quadrotors with large attitude maneuvers.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Daniel, M., Vijay, K.: Minimum snap trajectory generation and control for quadrotors. IEEE International Conference on Robotics and Automation (2011)
Almeida, M., Akella, M.: New numerically stable solutions for minimum-snap quadcopter Aggressive Maneuvers. American Control Conference (2017)
Liu. S., Mohta. K.: Search-based motion planning for aggressive flight. SE(3) (2017)
Yatong. An.: A numerical optimization method for three dimensional trajectory planning of four rotor aircraft. Proceedings of the 32nd China Control Conference, Volume B, (2013). (in Chinese)
Ibrahim, I.N., Al Akkad, M.: Exploiting an intelligent fuzzy-PID system in nonlinear aircraft pitch control. International Siberian Conference on Control and Communications (SIBCON). pp. 1–7. Moscow, Russia (2016)
Yang, S., Xian, B.: Trajectory tracking control design for the system of a quadrotor UAV with a suspended payload. Proceedings of the 36th Chinese Control Conference (CCC), pp. 777–782. Dalian, China (2017)
Madani, T., Benallegue: A backstepping control for a quadrotor helicopter. Proceedings of the 2006 IEEE/RSJ International Conference on International Conference on Intelligent Robots and Systems. pp. 3255–3260. Beijing, China (2006)
Mirzaei, M., Eghtesad, M., Alishahi, M.M.: A new robust fuzzy method for unmanned flying vehicle control. Journal of Central South University 22(6), 2166–2182 (2015)
Tian, G., Gao, Z.Q.: Benchmark tests of active disturbance rejection control on an industrial motion control platform. IEEE American Control Conference, pp. 5552–5557. St. Louis (2009)
Zheng, Q., Gao, Z.Q.: An energy saving factory-validated disturbance decoupling control design for extrusion process. IEEE Control and Automation. pp. 2891–2896. Beijing, China (2012)
Achieve improved motion and efficiency for advanced motor control designs in minutes with TI’s new InstaSPIN(TM)-MOTION technology, The Wall Street Journal, April 18, 2013 at http://online.wsj.com/article/PR-CO-20130418-907338.html?mod=googlenews
Yisha, L.: Auto disturbance rejection control method for quadrotor aircraft. Control Theory Appl. 32(10), (2015). (in Chinese)
Leishman, J.G.: Principles of Helicopter Aerodynamics. Cambridge University Press, New York (2006)
Michael, N., Mellinger, D., Lindsey, Q.: The grasp multiple micro-uavtestbed. IEEE Robot. Autom. Mag. 17(3), 56–65 (2010)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Editor(s) (if applicable) and The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Liu, C., Zhou, H., Dong, X., Wang, D. (2022). Optimal Trajectory Generation of UAV Considering Attitude Constraints. In: Yan, L., Duan, H., Yu, X. (eds) Advances in Guidance, Navigation and Control . Lecture Notes in Electrical Engineering, vol 644. Springer, Singapore. https://doi.org/10.1007/978-981-15-8155-7_167
Download citation
DOI: https://doi.org/10.1007/978-981-15-8155-7_167
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-8154-0
Online ISBN: 978-981-15-8155-7
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)